Система управління електроприводом вантажопідйомного механізму крана
Номер патенту: 44047
Опубліковано: 10.09.2009
Формула / Реферат
1. Система управління електроприводом вантажопідйомного механізму крана, що містить перетворювач частоти, з'єднаний з обмотками короткозамкнутого асинхронного двигуна, яка відрізняється тим, що вона додатково містить тензометричний датчик зусилля і блок обробки даних приладу безпеки крана, при цьому один з виходів тензометричного датчика зусилля сполучений з одним з функціональних входів перетворювача частоти з автономним інвертором напруги, а інший вихід з блоком обробки даних приладу безпеки крана.
2. Система управління електроприводом вантажопідйомного механізму крана за п. 1, яка відрізняється тим, що як перетворювач використовується перетворювач частоти з автономним інвертором напруги.
Текст
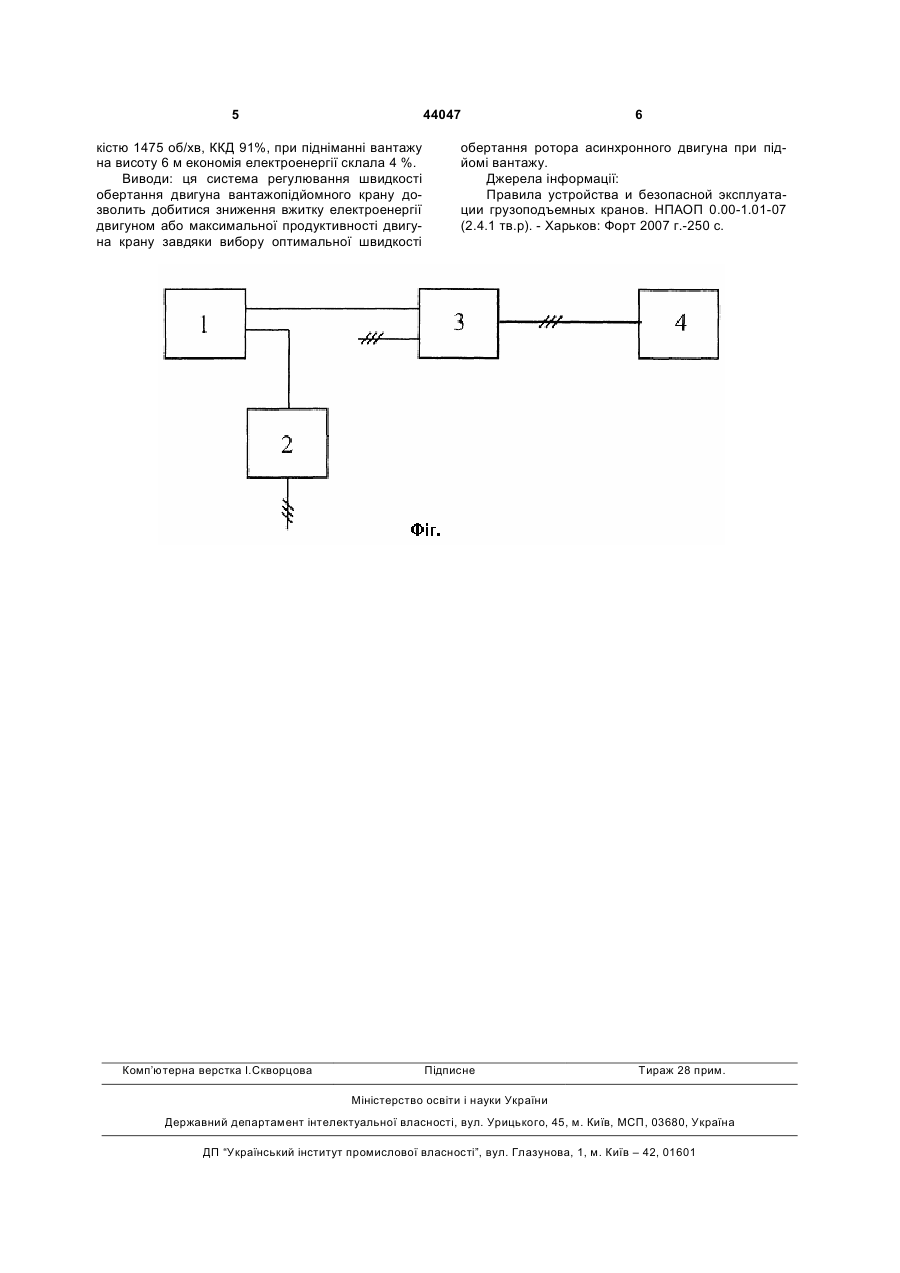
1. Система управління електроприводом вантажопідйомного механізму крана, що містить перетворювач частоти, з'єднаний з обмотками короткозамкнутого асинхронного двигуна, яка відрізняється тим, що вона додатково містить 3 У основу корисної моделі поставлено завдання удосконалення системи управління електроприводу вантажопідйомного механізму крану, в якому за допомогою введення додаткових елементів, нових зв'язків між елементами з'являється можливість залежно від маси вантажу, що піднімається, задавати оптимальну швидкість і прискорення підйому вантажу асинхронним короткозамкнутим двигуном лебідки вантажопідйомного механізму крану, дозволить забезпечити економію електроенергії при роботі крану. Для вирішення поставленого завдання пропонується система управління електроприводом вантажопідйомного крану, що містить перетворювач частоти, з'єднаний з обмотками короткозамкнутого асинхронного двигуна, відповідно до корисної моделі, вона додатково містить тензометрическии датчик зусилля і блок обробки даних приладу безпеки крану, при цьому один з виходів тензометрического датчика зусилля сполучений з одним з функціональних входів перетворювача частоти з автономним інвертором напруги, а інший вихід з блоком обробки даних приладу безпеки крану. При цьому як перетворювач застосований перетворювач частоти з автономним інвертором напруги. Суть корисної моделі пояснюється кресленням, де на фіг. представлена структурна схема системи управління електроприводом вантажопідйомного механізму крану. Система складається з тензометрического датчика зусилля 1, отримуючого живлення від блоку обробки даних приладу безпеки 2, перетворювача частоти з автономним інвертором напруги 3 і асинхронного короткозамкнутого двигуна 4. Як прилад безпеки може бути застосований ПЗК-10, виробництва МНПП «Елекран» або ОНК160М, виробництва ОАО «Арзамаський приборобудівний завод». У комплект прилада безпеки входять і тензометрические датчики. Для реалізації даної системи управління як перетворювач частоти може тат використаний перетворювач частоти з автономним інвертором напруга таких фірм як ХЕМЗ, Altivar, Siemens і тому подібне. Принцип роботи елементів системи регулювання наступний. По існуючих «Правилах експлуатації вантажопідйомних механізмів» всі крани мають бути оснащені приладами безпеки. До складу таких приладів входять тензометрические датчики зусилля і електронні блоки. Тензометрічеськие датчики на мостових кранах встановлюються під опору барабана лебідки. Живлення тензометричного датчика 1 здійснюється від блоку обробки даних приладу безпеки 2. Вхідна напруга приладу безпеки і перетворювача частоти дорівнює 380 В частотою 50 Гц. При піднімання вантажу лебідкою відбувається тиск на тензометрическии датчик барабаном. Значення вихідного сигналу з тензометрического датчика відповідає масі вантажу, що піднімається. Видаваний сигнал поступає в блок обробки даних приладу безпеки крану. У блоці закладена вантажопідйомна характеристика крану. Відбувається порівняння значення вантажу, що піднімається, що 44047 4 діє, з допустимим значенням, закладеним в процесорі приладу безпеки крану. Залежно від величини сигналу, що отримується від датчика, електронний блок виробляє сигнал, що вирішує або забороняє роботу крану. Крім того, на сучасні вантажопідйомні крани встановлюються асинхронні короткозамкнуті двигуни 4 разом з перетворювачем частоти з автономним інвертором напруги 3. У складі перетворювача частоти автономний інвертор напруги перетворять постійна напруга в змінне регульованої частоти і амплітуди. Автономний інвертор напруги управляється мікропроцесорним контроллером. Перетворення напруги з постійного в змінне здійснюється в мостовому транзисторному інверторі, зібраному на трьох транзисторно-діодних модулях. Транзисторно-діодний модуль є двома біполярним транзистором з ізольованим затвором (IGВТ-транзистора) і швидкодіючими зворотними діодами, включених зустрічно-паралельно кожному транзистору. IGBТтранзистори перемикаються багато разів протягом періоду вихідної частоти відповідно до широтноімульсної модуляції, мікропроцесорного контроллера, що задається. На виході перетворювача виходить необхідна синусоїда: необхідної частоти і амплітуди, що діє значень основної гармоніки вихідної напруги. Алгоритм роботи мікропроцесорного контроллера програмується, що дозволяє набувати певних значень вихідної напруги і частоти перетворювача, залежно від сигналів, датчиків, що подаються, підключених до перетворювача частоти з автономним інвертором напруги. Дану систему регулювання можна реалізувати таким чином. Мікропроцесорний контроллер в перетворювачі частоти програмується таким чином, що залежно від маси вантажу напруга і частота на виході перетворювача забезпечували певну швидкість і прискорення обертання валу двигуна при якому забезпечується мінімум втрат в двигуні або його максимальна продуктивність. При підготовці перетворювача до роботи, в процесі програмування, вноситься критерій оптимальності залежно від нормативних даних крану по відповідній класифікації. У випадку, якщо кран належить до групи кранів, яким важливий час підйому вантажу, то перетворювач частоти програмується таким чином, що вантаж піднімався за найбільш допустимий короткий проміжок часу з максимально допустимим прискоренням. При приналежність крану до групи, в якій при роботі не грає істотної ролі час підйому вантажу, перетворювач набудовується таким чином, що вантаж піднімається з швидкістю і прискоренням, то забезпечують мінімум втрат електроенергії при роботі двигуна. Розглянемо роботу системи управління для другого типа кранів. Сигнал, що змінюється залежно від маси вантажу, що піднімається, поступає на перетворювач частоти електроприводу лебідки крану. У перетворювачі частоти сигнал обробляється і вибирається оптимальне прискорення і швидкість піднімання вантажу при яких втрати в двигуні будуть мінімальними. Розрахунки показали, що для двигуна А200М4УЗ потужністю 37 кВт, номінальною швид 5 44047 кістю 1475 об/хв, ККД 91%, при підніманні вантажу на висоту 6 м економія електроенергії склала 4 %. Виводи: ця система регулювання швидкості обертання двигуна вантажопідйомного крану дозволить добитися зниження вжитку електроенергії двигуном або максимальної продуктивності двигуна крану завдяки вибору оптимальної швидкості Комп’ютерна верстка І.Скворцова 6 обертання ротора асинхронного двигуна при підйомі вантажу. Джерела інформації: Правила устройства и безопасной эксплуатации грузоподъемных кранов. НПАОП 0.00-1.01-07 (2.4.1 тв.р). - Харьков: Форт 2007 г.-250 с. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of electric drive of hoisting mechanism of crane
Автори англійськоюZaitsev Vadym Serhiiovych, Kharlanov Oleh Viktorovych
Назва патенту російськоюСистема управления электроприводом грузоподъемного механизма крана
Автори російськоюЗайцев Вадим Сергеевич, Харланов Олег Викторович
МПК / Мітки
МПК: B66B 1/28
Мітки: крана, механізму, система, електроприводом, вантажопідйомного, управління
Код посилання
<a href="https://ua.patents.su/3-44047-sistema-upravlinnya-elektroprivodom-vantazhopidjjomnogo-mekhanizmu-krana.html" target="_blank" rel="follow" title="База патентів України">Система управління електроприводом вантажопідйомного механізму крана</a>
Пристрій для керування електроприводом механізму підйому прогінного крана
Номер патенту: 31547
Опубліковано: 10.04.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22
Мітки: крана, керування, пристрій, механізму, прогінного, підйому, електроприводом
Формула / Реферат:
Пристрій для керування електроприводом механізму підйому прогінного крана, що містить датчик стану каната, задатчик, блок керування електроприводом механізму підйому вантажу, який відрізняється тим, що обладнаний датчиком довжини каната, який змонтований на канатному барабані і підключений до мікроконтролера, на другий вхід якого підключений задатчик, а на третій - датчик стану каната, причому до інформаційного виходу мікроконтролера...
Привід механізму пересування вантажопідйомного крана
Номер патенту: 2879
Опубліковано: 16.08.2004
Автори: Процак Павло Степанович, Шпара Олександр Іванович, Степанов Михайло Іванович
МПК: B66C 9/00
Мітки: пересування, привід, крана, вантажопідйомного, механізму
Формула / Реферат:
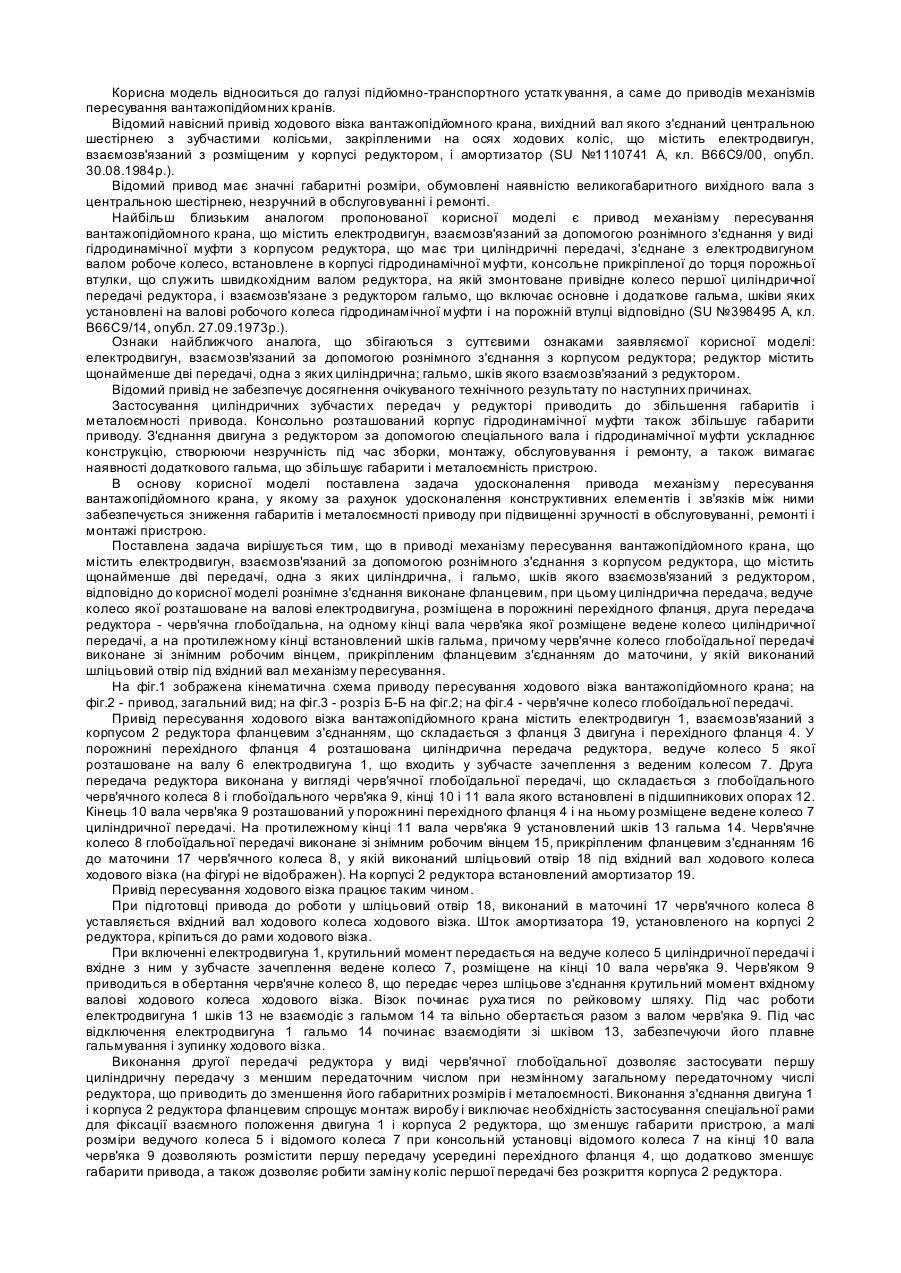
Привід механізму пересування вантажопідйомного крана, що містить електродвигун, взаємозв'язаний за допомогою рознімного з'єднання з корпусом редуктора, що містить щонайменше дві передачі, одна з яких циліндрична, і гальмо, шків якого взаємозв'язаний з редуктором, який відрізняється тим, що рознімне з'єднання виконане фланцевим, при цьому циліндрична передача, ведуче колесо якої розташоване на валу електродвигуна, розміщена в порожнині...
Гальмо вантажопідйомного механізму
Номер патенту: 25150
Опубліковано: 25.07.2007
Автор: Шевченко Сергій Іванович
МПК: B66D 5/00
Мітки: вантажопідйомного, гальмо, механізму
Формула / Реферат:
Гальмо вантажопідйомного механізму, яке містить основу з шарнірно розташованими на ній двома важелями, в яких виконано дугоподібні пази, що розташовані симетрично відносно поперечної осі симетрії, привід розмикання, триплечий важіль, з’єднаний з одним із важелів тягою, тягу із замикальною пружиною, колодки з пальцями, розміщеними у вказаних дугоподібних пазах і забезпеченими утримувальними пружинами, регулювальний гвинт та гальмовий шків, яке...
Телескопічна стріла вантажопідйомного механізму
Номер патенту: 18774
Опубліковано: 15.11.2006
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Таланов Артем Олександрович
МПК: B66C 23/68
Мітки: телескопічна, механізму, стріла, вантажопідйомного
Формула / Реферат:
Телескопічна стріла вантажопідйомного механізму, що містить нерухому і висувні секції коробчастого перерізу, кожна з яких утворена бічними вертикальними стінками, з'єднаними верхньою та нижньою полицями, і встановлені між полицями секції опори ковзання, яка відрізняється тим, що нижня полиця кожної із секцій має коритоподібний переріз, при цьому вершини нижніх полиць усіх секцій розміщені у вертикальній площині симетрії стріли.
Пристрій для гальмування електромеханічного приводу моста вантажопідйомного крана
Номер патенту: 4968
Опубліковано: 15.02.2005
Автори: Живолуга Сергій Вікторович, Товстун Мілан Васильович, Кукса Євген Володимирович, Конев Іван Сергійович, Токарев Валерій Веніамінович, Махсма Михайло Миколайович, Власов Валерій Вікторович, Токарев Веніамін Петрович
МПК: F16D 51/00, H02P 3/18
Мітки: пристрій, гальмування, приводу, електромеханічного, моста, крана, вантажопідйомного
Формула / Реферат:
1. Пристрій для гальмування електромеханічного приводу моста вантажопідйомного крана, що включає силове коло електродвигуна, у яке послідовно ввімкнений реверсивний контактор і паралельно - електродвигун гідроштовхача гальма, який відрізняється тим, що в силове коло електродвигуна електромеханічного приводу моста паралельно ввімкнено реле пуску електродвигуна гідроштовхача гальма, нормально відкриті контакти якого послідовно ввімкнені в...
Попередній патент: Бункер зернозбирального комбайна
Наступний патент: Рятувальна капсула
Випадковий патент: Спосіб виявлення об'єктів, що переміщуються в трубопроводі, та сигналізатор для його виконання