Пристрій для керування електроприводом механізму підйому прогінного крана
Номер патенту: 31547
Опубліковано: 10.04.2008
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
Формула / Реферат
Пристрій для керування електроприводом механізму підйому прогінного крана, що містить датчик стану каната, задатчик, блок керування електроприводом механізму підйому вантажу, який відрізняється тим, що обладнаний датчиком довжини каната, який змонтований на канатному барабані і підключений до мікроконтролера, на другий вхід якого підключений задатчик, а на третій - датчик стану каната, причому до інформаційного виходу мікроконтролера підключений індикатор поточної довжини каната, а керуючим виходом мікроконтролер зв'язаний з блоком керування електроприводом механізму підйому вантажу, крім того датчик довжини каната виконаний у вигляді оптично зв'язаних світлодіода і фотодіода (оптичний зв'язок перекривається шторками, закріпленими на реборді канатного барабана), причому останній катодом підключений до бази транзисторного ключа, емітер якого через замикаючі контакти пускачів електродвигуна механізму підйому вантажу підключений до двох входів мікроконтролера.
Текст
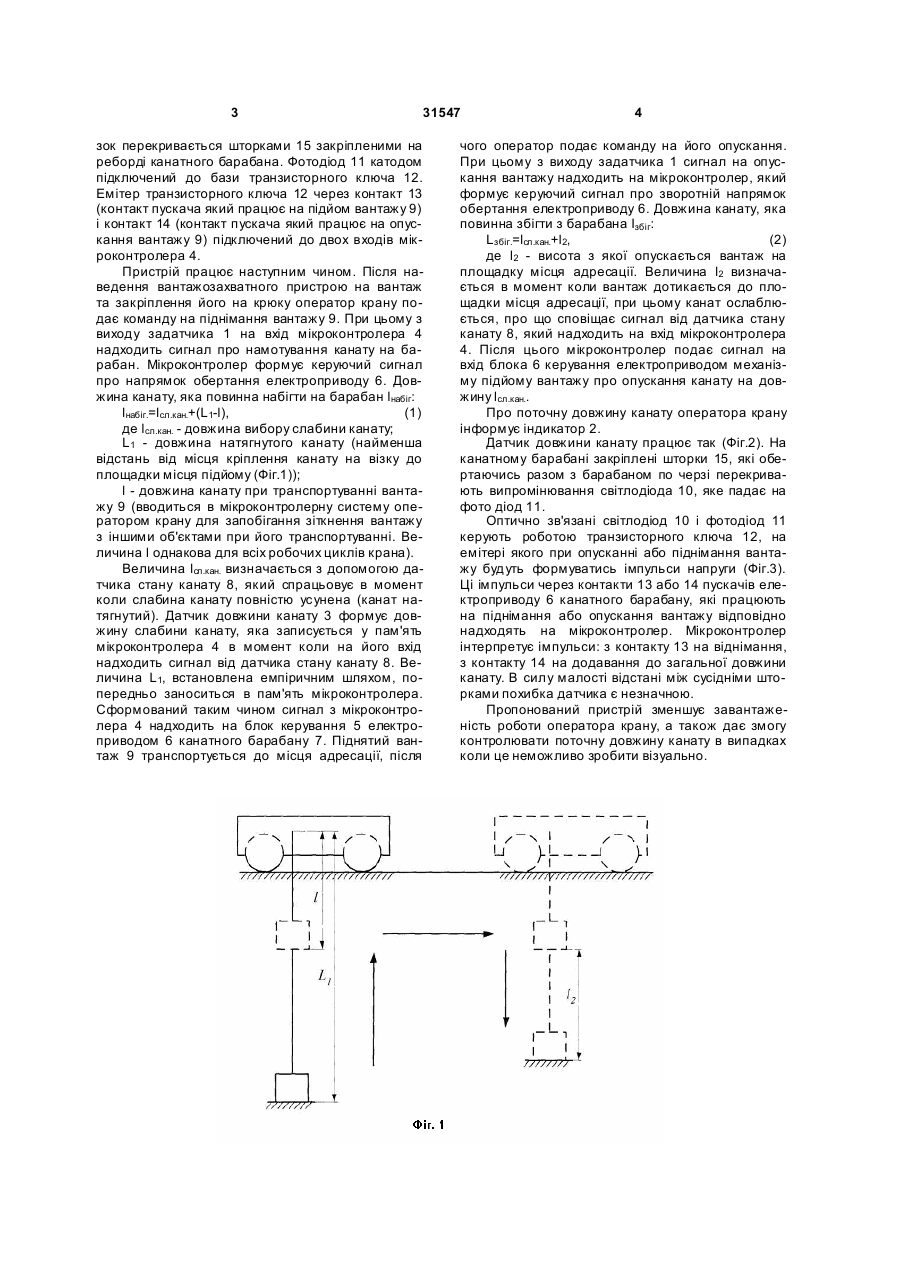
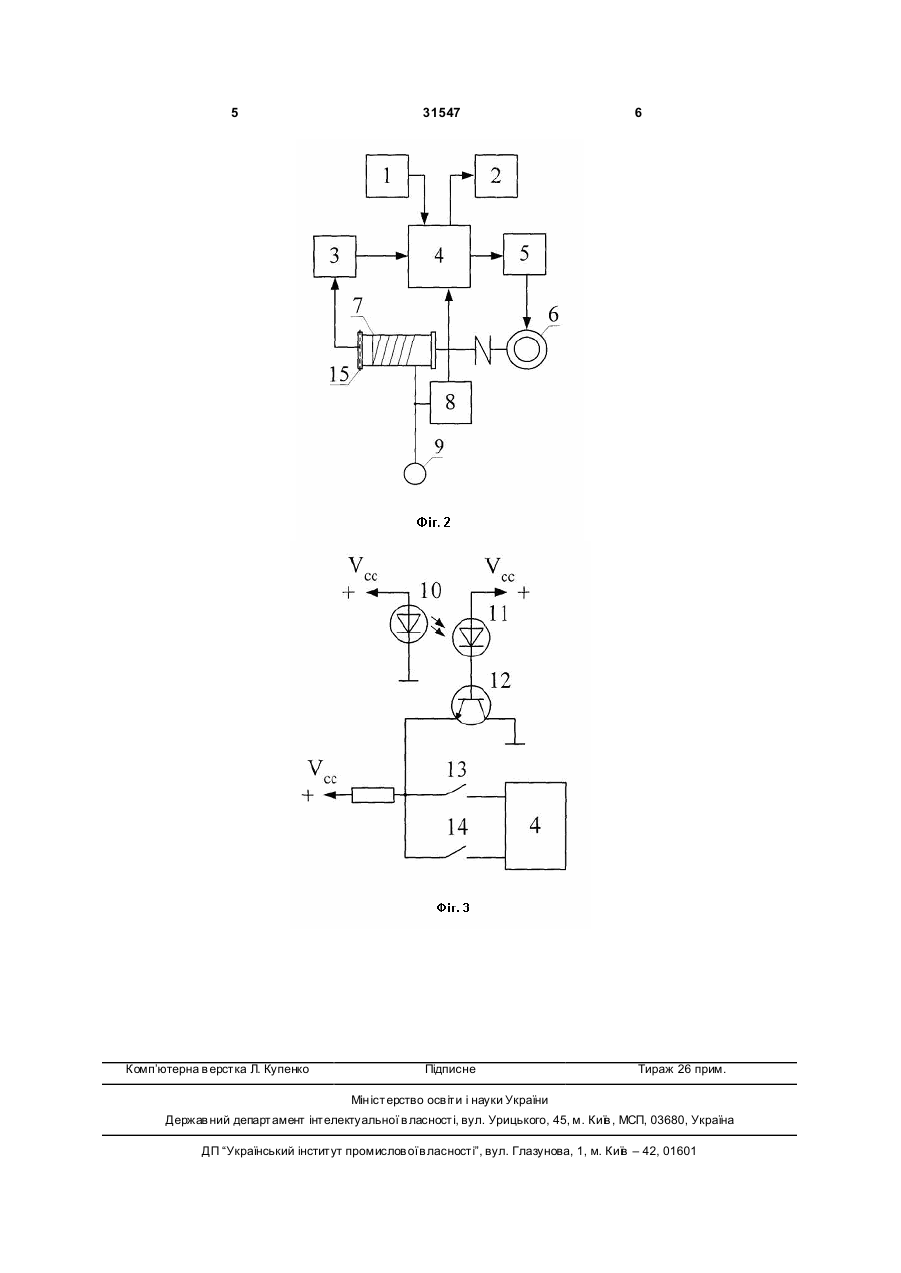
Пристрій для керування електроприводом механізму підйому прогінного крана, що містить датчик стану каната, задатчик, блок керування електроприводом механізму підйому вантажу, який відрізняється тим, що обладнаний датчиком довжини каната, який змонтований на канатному барабані і підключений до мікроконтролера, на 3 31547 зок перекривається шторками 15 закріпленими на реборді канатного барабана. Фотодіод 11 катодом підключений до бази транзисторного ключа 12. Емітер транзисторного ключа 12 через контакт 13 (контакт пускача який працює на підйом вантажу 9) і контакт 14 (контакт пускача який працює на опускання вантажу 9) підключений до двох входів мікроконтролера 4. Пристрій працює наступним чином. Після наведення вантажозахватного пристрою на вантаж та закріплення його на крюку оператор крану подає команду на піднімання вантажу 9. При цьому з виходу задатчика 1 на вхід мікроконтролера 4 надходить сигнал про намотування канату на барабан. Мікроконтролер формує керуючий сигнал про напрямок обертання електроприводу 6. Довжина канату, яка повинна набігти на барабан lнабіг: lнабіг.=lсл.кан.+(L1-l), (1) де lсл.кан. - довжина вибору слабини канату; L1 - довжина натягнутого канату (найменша відстань від місця кріплення канату на візку до площадки місця підйому (Фіг.1)); l - довжина канату при транспортуванні вантажу 9 (вводиться в мікроконтролерну систему оператором крану для запобігання зіткнення вантажу з іншими об'єктами при його транспортуванні. Величина l однакова для всіх робочих циклів крана). Величина lсл.кан. визначається з допомогою датчика стану канату 8, який спрацьовує в момент коли слабина канату повністю усунена (канат натягнутий). Датчик довжини канату 3 формує довжину слабини канату, яка записується у пам'ять мікроконтролера 4 в момент коли на його вхід надходить сигнал від датчика стану канату 8. Величина L1, встановлена емпіричним шляхом, попередньо заноситься в пам'ять мікроконтролера. Сформований таким чином сигнал з мікроконтролера 4 надходить на блок керування 5 електроприводом 6 канатного барабану 7. Піднятий вантаж 9 транспортується до місця адресації, після 4 чого оператор подає команду на його опускання. При цьому з виходу задатчика 1 сигнал на опускання вантажу надходить на мікроконтролер, який формує керуючий сигнал про зворотній напрямок обертання електроприводу 6. Довжина канату, яка повинна збігти з барабана Ізбіг: Lзбіг.=lсл.кан.+l2, (2) де l2 - висота з якої опускається вантаж на площадку місця адресації. Величина l2 визначається в момент коли вантаж дотикається до площадки місця адресації, при цьому канат ослаблюється, про що сповіщає сигнал від датчика стану канату 8, який надходить на вхід мікроконтролера 4. Після цього мікроконтролер подає сигнал на вхід блока 6 керування електроприводом механізму підйому вантажу про опускання канату на довжину lсл.кан.. Про поточну довжину канату оператора крану інформує індикатор 2. Датчик довжини канату працює так (Фіг.2). На канатному барабані закріплені шторки 15, які обертаючись разом з барабаном по черзі перекривають випромінювання світлодіода 10, яке падає на фото діод 11. Оптично зв'язані світлодіод 10 і фотодіод 11 керують роботою транзисторного ключа 12, на емітері якого при опусканні або піднімання вантажу будуть формуватись імпульси напруги (Фіг.3). Ці імпульси через контакти 13 або 14 пускачів електроприводу 6 канатного барабану, які працюють на піднімання або опускання вантажу відповідно надходять на мікроконтролер. Мікроконтролер інтерпретує імпульси: з контакту 13 на віднімання, з контакту 14 на додавання до загальної довжини канату. В силу малості відстані між сусідніми шторками похибка датчика є незначною. Пропонований пристрій зменшує завантаженість роботи оператора крану, а також дає змогу контролювати поточну довжину канату в випадках коли це неможливо зробити візуально. 5 Комп’ютерна в ерстка Л. Купенко 31547 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of electric drive of mechanism of lifting of bay crane
Автори англійськоюLoveikin Viacheslav Serhiiovych, Yaroshenko Volodymyr Fedorovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюУстройство для управления электроприводом механизма подъема пролетного крана
Автори російськоюЛовейкин Вячеслав Сергеевич, Ярошенко Владимир Федорович, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/22
Мітки: крана, керування, прогінного, електроприводом, підйому, механізму, пристрій
Код посилання
<a href="https://ua.patents.su/3-31547-pristrijj-dlya-keruvannya-elektroprivodom-mekhanizmu-pidjjomu-proginnogo-krana.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування електроприводом механізму підйому прогінного крана</a>
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Кулік Анатолій Степанович, Лученко Олег Олексійович, Гісцова Тетяна Іванівна
МПК: H02P 21/00
Мітки: керування, пристрій, електроприводом, асинхронним
Формула / Реферат:
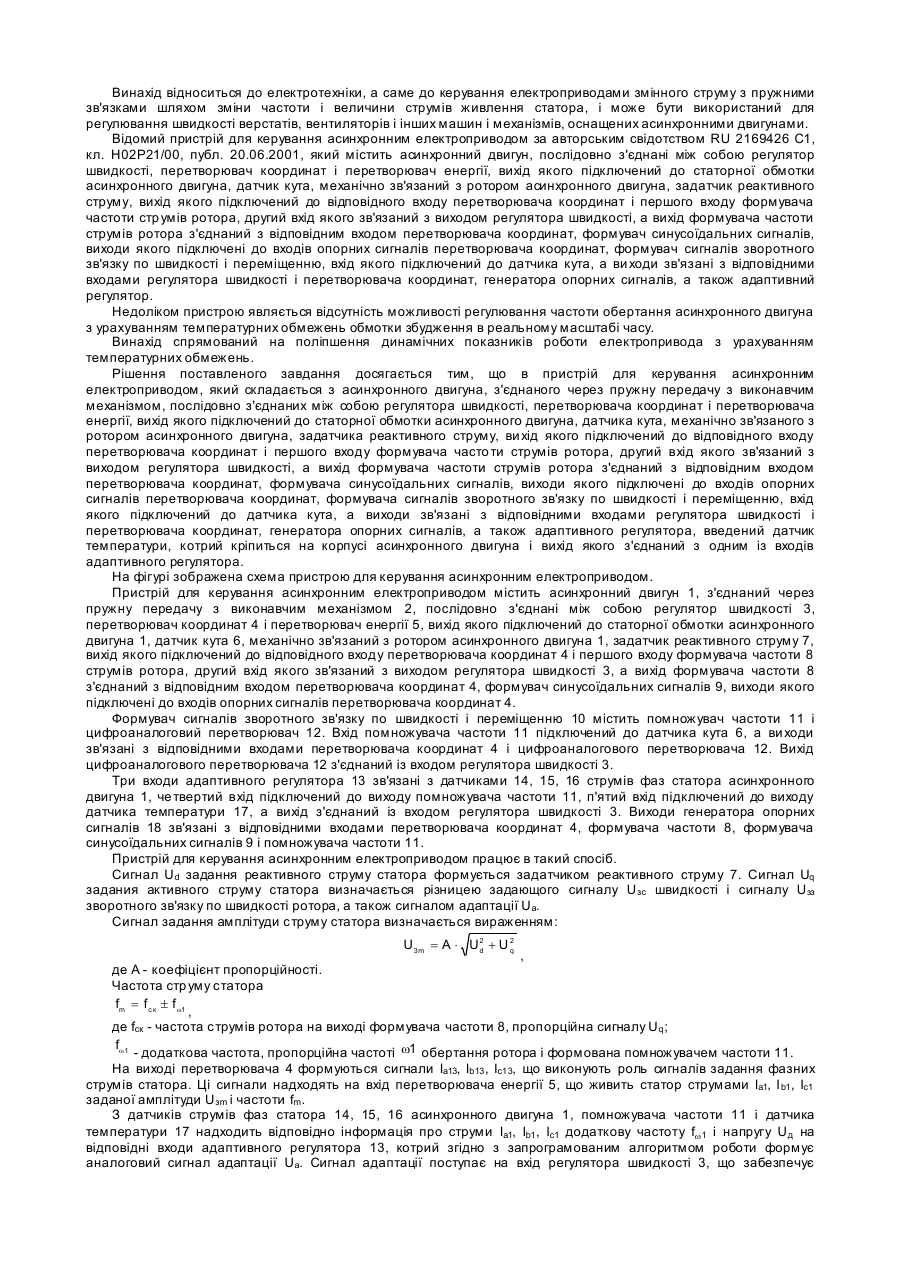
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу
Номер патенту: 54172
Опубліковано: 17.02.2003
Автор: Холодний Валерій Іванович
МПК: B66C 13/04
Мітки: транспортного, механізму, приводом, пристрій, керування, гнучкою, підвіскою, вантажу
Формула / Реферат:
Пристрій для керування приводом транспортного механізму з гнучкою підвіскою вантажу, який містить послідовно з'єднані задатчик швидкості, задатчик інтенсивності прискорення (гальмування), перший суматор, блок порівняння і виконуючий блок, який діє на транспортний механізм, датчик швидкості якого підключений до одного із входів блока порівняння, а також послідовно з'єднані датчик довжини підвіски вантажу , блок добування квадратного кореня,...
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ромасевич Юрій Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/04
Мітки: вантажу, розгойдувань, обмеження, візка, крана, пристрій, підвішеного
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза

Номер патенту: 60932
Опубліковано: 15.10.2003
Автори: Коваленко Павло Михайлович, Гураль Василь Володимирович, Мєнта Мєнтєшєв, Калус Костянтин Якович, Кирил Джустров, Іван Стоілов
МПК: B60L 15/20
Мітки: електроприводом, акумуляторного, рудникового, руху, керування, електровоза, швидкістю, пристрій
Формула / Реферат:
1. Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза, що містить акумуляторну батарею, до виходу якої підключені елементи кола тягових двигунів, датчик напруги акумуляторної батареї, датчики швидкості тягових двигунів, який відрізняється тим, що у коло тягових двигунів додатково, через автоматичний роз'єднувач, вхід якого з'єднаний з виходом акумуляторної батареї, та головний контактор, підключені...
Обмежувач висоти підйому гакової підвіски крана з телескопічною стрілою
Номер патенту: 27542
Опубліковано: 15.09.2000
Автор: Охримович Володимир Маркіянович
МПК: B66C 23/88
Мітки: телескопічною, гакової, підвіски, підйому, обмежувач, висоті, крана, стрілою
Текст:
...поворотному елементі тягарцем містить нові, ВІДМІННІ від прототипу суттєві ознаки, а саме пщпружинений елемент виконаний у ВИГЛЯДІ барабану з можливістю намотування на себе гнучкої зв'язки при ПІДЙОМІ тягарця упором гакової ПІДВІСКИ І з'єднаний з акустичним генератором, встановленим в трубній порожнині рухомої секції телескопічної стріли біля її оголовку, а перетворювач виконаний у вигляді акустичного пеленгатора, встановленого в тій же...
Попередній патент: Пристрій для визначення кінематичних параметрів кранового візка
Наступний патент: Спосіб контролю чисельності та шкідливості фітофагів насаджень ягідників
Випадковий патент: Стрічковий конвеєр