Пристрій для оптимально узгодженої фільтрації сигналів
Формула / Реферат
1. Пристрій для оптимально узгодженої фільтрації сигналів, який містить послідовно з'єднані блок віднімання, перший інтегратор та підсилювач у ![]() разів, вихід якого з'єднано із другим входом блока віднімання, який відрізняється тим, що на виході блока віднімання уведено ізодромний блок, який містить підсилювач у
разів, вихід якого з'єднано із другим входом блока віднімання, який відрізняється тим, що на виході блока віднімання уведено ізодромний блок, який містить підсилювач у ![]() разів та послідовно з'єднані другий інтегратор, підсилювач у
разів та послідовно з'єднані другий інтегратор, підсилювач у ![]() разів і суматор, другий вхід якого з'єднано з виходом підсилювача у
разів і суматор, другий вхід якого з'єднано з виходом підсилювача у ![]() разів, вхід якого з'єднано зі входом другого інтегратора.
разів, вхід якого з'єднано зі входом другого інтегратора.
2. Пристрій за п. 1, який відрізняється тим, що максимум відношення сигнал - перешкода одержується шляхом підбору оптимального постійного значення коефіцієнтів підсилення ![]() і
і ![]() .
.
Текст
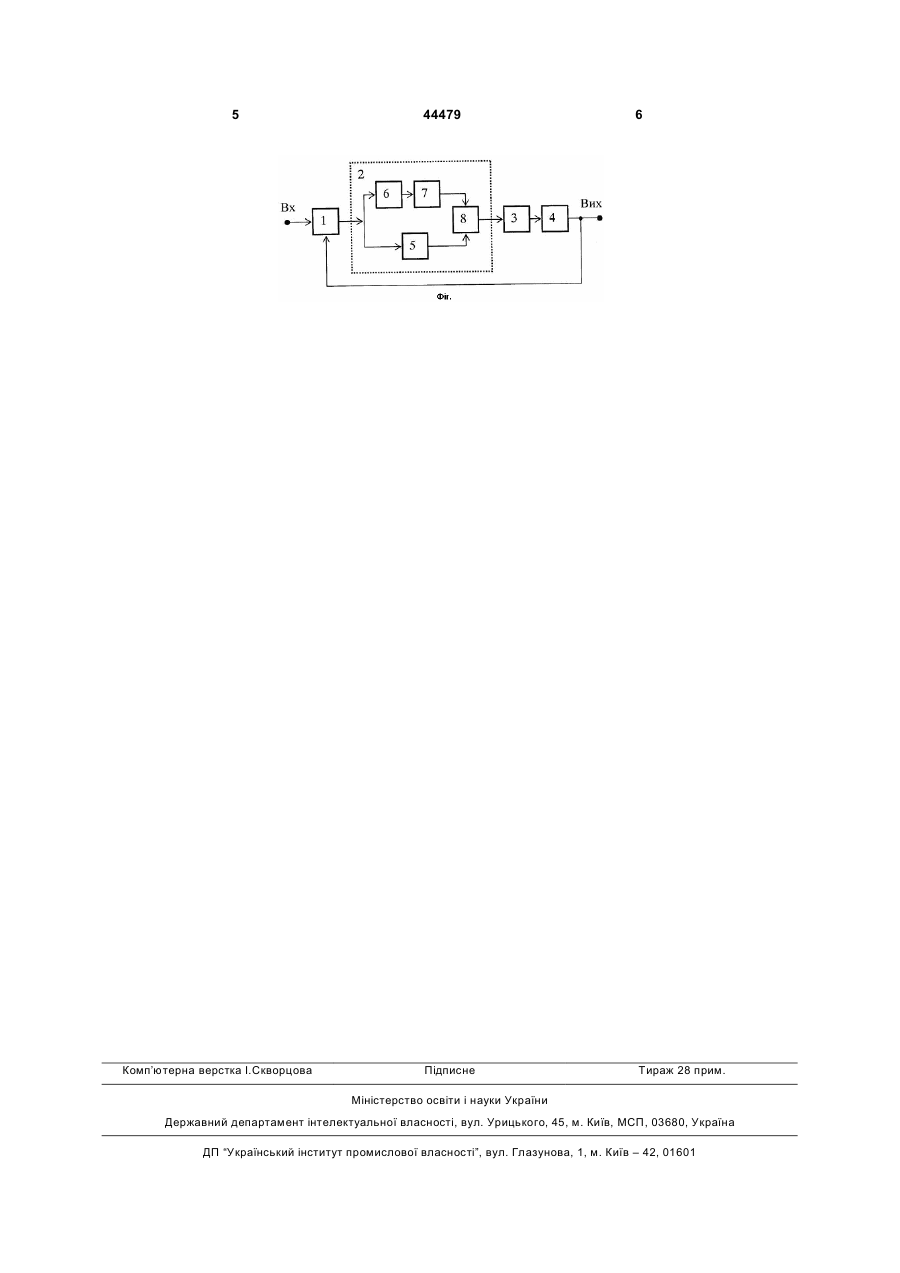
1. Пристрій для оптимально узгодженої фільтрації сигналів, який містить послідовно з'єднані блок віднімання, перший інтегратор та підсилювач у K1 разів, вихід якого з'єднано із другим входом блока віднімання, який відрізняється тим, що на 2 (19) 1 3 Технічною задачею, яка вирішується корисною моделлю, є задача одержання значно більш ефективного та простого пристрою для слідкування саме за зміщеннями активного спектра сигналів виміряної інформації. Ця задача вирішується пристроєм для оптимально узгодженої фільтрації сигналів, який містить послідовно з'єднані блок віднімання, перший інтегратор та підсилювач у K1 разів, вихід якого з'єднано із другим входом блока віднімання. Відрізняється цей пристрій тим, що на виході блока віднімання уведено відомий ізодромний блок, який містить підсилювач у K 2 разів та послідовно з'єднані другий інтегратор, підсилювач у K 3 разів і суматор, другий вхід якого з'єднано з виходом підсилювача у K 2 разів, вхід якого з'єднано зі входом другого інтегратора. Відрізняється цей пристрій також і тим, що оптимальний максимум відношення сигнал - перешкода одержується шляхом підбору постійного значення коефіцієнтів підсилення K1, K 2 і K 3 . На кресленні, що додається, наведена структурна електрична схема запропонованого пристрою, на якому позначено блок віднімання 1, іподромний блок 2, перший інтегратор 3, підсилювач 4 у K1 разів, підсилювач 5 у K 2 разів, другий інтегратор 6, підсилювач 7 у K 3 разів і суматор 8. Входом запропонованого пристрою є вхід блока віднімання 1, а виходом - вихід підсилювача 4. Цей вихід з'єднаний із другим входом блока віднімання 1, вихід якого з'єднано зі входом ізодромного блока 2, тобто - з об'єднаним входом підсилювача 5 і інтегратора 6, який послідовно з'єднано з підсилювачем 7 і суматором 8, другий вхід якого з'єднано з виходом підсилювача 5. Вихід суматора 8, тобто вихід ізодромного блока 2 з'єднано зі входом інтегратора 3, вихід якого з'єднано із входом підсилювача 4. Працює запропонований пристрій таким чином: Нехай напруга u1(t ) , що надходить на вхід запропонованого пристрою, відповідає виміряній інформації про довільний нестаціонарний процес, наприклад, звуковий сигнал, чи процес зміни струму у контактному проводі при русі електропоїзда, чи процес гальмування локомотива і інші процеси в загальному випадку разом з перешкодами. У початковий момент після підключення зазначеної напруги чи з появою звуку після чергової паузи, коли зовнішнє діяння являє собою короткий імпульс, широкосмуговий спектр якого є суцільним і однорідним, на виході пристрою ще не встигає з'явитися напруга u2 (t ) , тому зворотний зв'язок виявляється відключеним і пристрій працює в режимі стаціонарного фільтра із відповідною початковою настройкою. 44479 4 У цьому випадку операторна передаточна фуK нкція (ПФ) пристрою має вигляд: K1(p) = K 2 (p) 1 , p K 2p + K 3 де K 2 (p) = є ПФ ізодромного блока 2. p Такий режим буде продовжуватися доти, поки на виході підсилювача 4 не з'явиться напруга u2 (t ) перехідного процесу. Тоді на виході блока віднімання 1 з'явиться напруга похибки Du(t ) u1(t ) - u2 (t ) . Так починається перехідний = процес захоплення вхідним сигналом запропонованого фільтра, який тепер став слідкувальним (самонастроювальним) фільтром (СФ). Принцип дії будь якої слідкувальної системи засновано на досягненні мінімальної похибки Du(t ) . При цьому, можна показати, ПФ запропонованого фільтра СФ має вигляд (K 2p + K 3 )K1 . З цього виразу виходить, = K (p ) P 2 + pK 2K1 + K 3K1 що цей СФ є потрібним саме смуговим фільтром, початкова настройка якого залежить лише від значень коефіцієнтів K1, K 2 і K 3 підсилювачів відповідно 4, 5 і 7, що дозволяє одержати у процесі самонастройки виділення у кожен момент часу необхідну активну вузьку смугу частот. Отже, саме такий фільтр є досить точним СФ, напруга u2 (t ) на виході якого практично дорівнює вхідній напрузі u1(t ) . Це означає що, оскільки СФ є лінійним фільтром і в ньому не міститься додаткових джерел коливання іншої частоти, то сигнали на його вході і виході не можуть відрізнятися один від іншого ні лише за формою, але також і за спектральною частотою. Проте, з точки зору функціонування загальних систем автоматичного керування, такий СФ є астатичним фільтром другого порядку , який в усталеному режимі має певного значення постійну похибку лише за прискоренням, тобто Du(= 2a2 / K1K 3 , де a2 - один з коефіцієнтів фунt) кції апроксимації u1(t ) = a0 + a1t + a2t 2 вхідного сигналу на відрізках часу з найбільшою крутизною. Таким чином у запропонованому СФ шляхом підбору коефіцієнтів K1, K 2 і K 3 підсилювачів відповідно 4, 5 і 7 дійсно досягається оптимально узгоджена фільтрація активного (не загального) спектра сигналів, тобто одержується оптимальний максимум відношення сигнал - перешкода. Численні експерименти різноманітних комп'ютерних моделей цілком підтвердили ефективність та реальну корисність запропонованого фільтра. 5 Комп’ютерна верстка І.Скворцова 44479 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for optimum signal matched filtering
Автори англійськоюTunyk Volodymyr Fedotovych
Назва патенту російськоюУстройство для оптимального согласования фильтрации сигналов
Автори російськоюТуник Владимир Федотович
МПК / Мітки
МПК: H03H 21/00
Мітки: оптимальної, сигналів, фільтрації, узгодженої, пристрій
Код посилання
<a href="https://ua.patents.su/3-44479-pristrijj-dlya-optimalno-uzgodzheno-filtraci-signaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для оптимально узгодженої фільтрації сигналів</a>
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів
Номер патенту: 24506
Опубліковано: 10.07.2007
Автори: Тертичний Григорій Миколайович, Третьяков Василь Олександрович, Макаренко Олександр Сергійович
МПК: H04J 13/00, H04B 1/10, H04L 5/00
Мітки: компенсації, підсиленні, завад, цифрових, пристрій, сигналів, відновленні
Формула / Реферат:
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів, що містить основний і компенсаційний канали, який відрізняється тим, що в нього введені електронні ключі К1 і К2, диференціатор, інтегратор зі скиданням, інвертор, двобічний підсилювач-обмежувач, тригери, схема керування, при цьому вхід пристрою з'єднаний з входом ключа К1 і входом диференціатора, вихід ключа К1 з'єднаний з першим входом суматора, вихід диференціатора...
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів
Номер патенту: 87299
Опубліковано: 10.07.2009
Автори: Тертичний Григорій Миколайович, Макаренко Олександр Сергійович, Третьяков Василь Олександрович
МПК: H04B 1/10
Мітки: завад, цифрових, компенсації, відновленні, підсиленні, сигналів, пристрій
Формула / Реферат:
Пристрій компенсації завад при підсиленні і відновленні цифрових сигналів, що вміщує основний і компенсаційний канали, який відрізняється тим, що в нього введені електронні ключі К1 і К2, диференціатор, інтегратор зі скиданням, інвертор, двобічний підсилювач-обмежувач, тригери, схема керування, при цьому вхід пристрою з'єднаний з входом ключа К1 і входом диференціатора, вихід ключа К1 з'єднаний з першим входом суматора, вихід диференціатора...
Спосіб одержання узгодженого фільтра і пристрій для узгодженої фільтрації (варіанти) в безпровідній системі зв’язку множинного вводу/виводу (мімо)
Номер патенту: 86362
Опубліковано: 27.04.2009
Автори: Кетчум Джон В., Гаал Питер, Уоллейс Марк С.
МПК: H04B 7/06, H04B 7/08, H04L 1/02, H04L 25/02
Мітки: узгодженого, пристрій, одержання, варіанти, зв'язку, множинного, фільтрації, узгодженої, системі, спосіб, мімо, фільтра, безпровідній
Формула / Реферат:
1. Спосіб одержання узгодженого фільтра на основі керуючого опорного сигналу в безпровідній системі зв'язку множинного вводу/виводу (МІМО), який полягає в тому, що:одержують множину наборів прийнятих символів для керуючого опорного сигналу, прийнятого через першу лінію зв'язку МІМО та згенерованого на основі множини керуючих векторів; іодержують узгоджений фільтр на основі множини наборів прийнятих символів, причому узгоджений...
Пристрій для підсилювання сигналів датчика наявності вагона на колії
Номер патенту: 18574
Опубліковано: 15.11.2006
Автор: Снітовський Володимир Михайлович
МПК: H03K 3/023
Мітки: датчика, колії, пристрій, наявності, сигналів, підсилювання, вагона
Формула / Реферат:
1. Пристрій для підсилювання сигналів датчика наявності вагона на колії, що включає принаймні один канал 1К датчика Д і принаймні один операційний підсилювач ОП1 сигналу датчика, який відрізняється тим, що датчик наявності вагона на колії має другий аналогічний канал 2К, до якого своїм першим входом підключений другий аналогічний операційний підсилювач ОП2 сигналу датчика, а останній своїм виходом підключений через вузол заборони В3 до...
Спосіб адаптивної цифрової фільтрації сигналів і пристрій для його здійснення
Номер патенту: 55522
Опубліковано: 15.04.2003
Автори: БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, ТОВСТЯК ВОЛОДИМИР ВАСИЛЬОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ
МПК: G06F 15/18, G06F 17/10, G01S 15/00, A61B 8/00
Мітки: цифрової, сигналів, адаптивної, фільтрації, здійснення, спосіб, пристрій
Формула / Реферат:
1. Спосіб адаптивної цифрової фільтрації сигналів, який включає тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, задання порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень,...
Попередній патент: Спосіб регулювання деформацій русло-заплавного комплексу
Наступний патент: Технологічна лінія для виготовлення дрібноштучних будівельних виробів
Випадковий патент: Самозмащувальний композит