Датчик лінійних прискорень
Номер патенту: 45150
Опубліковано: 26.10.2009
Автори: Клецько Вероніка Сергіївна, Гордін Олександр Григорович

Формула / Реферат
Датчик лінійних прискорень, що містить камеру, повністю заповнену рідиною, з'єднану з корпусом, в якій нерухомо закріплена жорстка пластина із центральним і периферійними отворами, дві пружні розтяжки і збудник коливань струнного частотного перетворювача, який відрізняється тим, що в камері додатково розміщено ще одну пластину, ідентичну першій, введені дві гідравлічні магістралі, що з'єднують камеру з першим і другим гідроциліндрами із сильфонами в торцях, кожний з яких зв'язаний через жорсткий шток з рухомою рамою розміщеного за межами камери струнного частотного перетворювача, струнні пружні розтяжки якого закріплені одними своїми кінцями на рухомому центральному вузлі закріплення, а другими кінцями - на нерухомих вузлах закріплення, розташованих на нерухомій рамі.
Текст
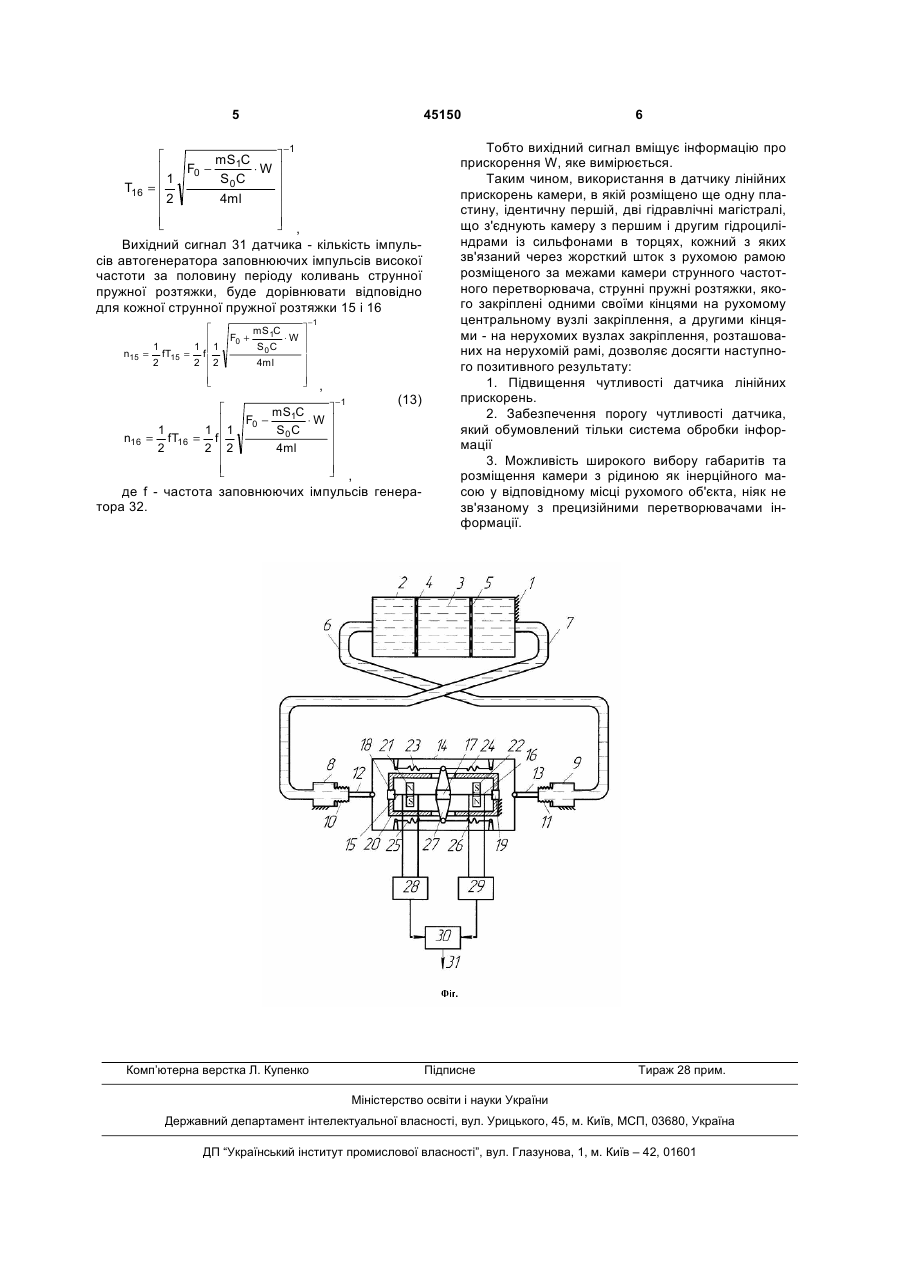
Датчик лінійних прискорень, що містить камеру, повністю заповнену рідиною, з'єднану з корпусом, в якій нерухомо закріплена жорстка пластина із центральним і периферійними отворами, дві 3 заповненою щільною рідиною 3 як інерційною масою і двох нерухомо встановлених в камері 2 жорстких пластин 4 і 5 із центральним і периферійними отворами, двох гідравлічних магістралей 6 і 7, що з'єднують камеру 2 з першим 8 і другим 9 гідроциліндрами із сильфонами 10, 11 в торцях, кожний з яких зв'язаний через жорсткий шток 12 і 13 відповідно з рухомою рамою 14. Всередині рухомої рами 14 розміщений струнний частотний перетворювач, до складу якого входить дві струнні пружні розтяжки 15 і 16, закріплені одними своїми кінцями на рухомому центральному вузлі закріплення 17, а другими кінцями - на нерухомих вузлах закріплення 18 і 19 розташованих на нерухомої рамі 20. Кожна струнна пружна розтяжка 15 і 16 знаходиться у полі збудника коливань 21 і 22 відповідно. Рухомий центральний вузол закріплення 17 з'єднаний з рухомою рамою 14 за допомогою пружних елементів 23, 24, 25, 26, розташованих симетрично відносно повздовжньої осі рухомої рами 14. Центральний вузол закріплення 17 закріплений на коромислі 27, з яким з'єднані пружкі елементи 23, 24, 25, 26. Струнні пружні розтяжки 15 і 16 у початковому стані мають певне початкове натяжіння, при цьому власні частоти поперечних коливань обох розтяжок у полі збудників коливань 21 і 22 співпадають. Кожна струнна пружна розтяжка 15 і 16 струнного частотного перетворювача є елементом автогенератора, який формує вхідні сигнали для перетворювачів 28, 29 та обчислювального пристрою 30. Вихідний сигнал 31 датчика, який вміщує інформацію про прискорення, яке вимірюється, формується за допомогою обчислювального пристрою 30. Датчика лінійних прискорень працює наступним чином. Камера 2 датчика повністю заповнена рідиною 3, в якості інерційної маси, тому якщо рух датчика відбувається з прискореннями на стінки камери 2 діє сила F=mW, (1) де m - маса рідини, W - проекція уявного прискорення корпуса 1 датчика на вісь чутливості датчика. За рахунок діючої сили F на торцьових стінках камери 2 з'являється додатковий тиск рідини mW ∆p = (2) S0 , де S0 - площа торцьової стінки камери з рідиною. На торцьових стінках камери 2 додатковий тиск має різні знаки: на одній -позитивний, на другій – негативний, відповідно до напрямку вектора уявного прискорення W . Тиск рідини в гідромагістралях 6 і 7 та в гідроциліндрах 8, 9 змінюється відповідно до тиску рідини в камері 2. Сильфони 10 і 11 за допомогою жорстких штоків 12 і 13 з'єднані з рухомою рамою 14, за рахунок чого існує вплив жорстких штоків 12 і 13 сильфонів 10 і 1 І на пружні елементи 23, 24, 25, 26. Сила, з якою жорсткий шток 12 або 13 діє на рухому раму 14: 45150 4 ∆F=∆pS1, (3) S1 - площа поперечного перетину сильфона 10 або 11. Використовуючи формули (2) і (3), запишемо mWS 1 ∆F = (4) S0 , При цьому лінійний хід жорсткого штока 12 або 13 визначається так: ∆F lc = Cc , (5) де Cc - коефіцієнт жорсткості сильфона як пружного елемента. Хід вузлів закріплення пружних елементів 23, 24, 25, 26 на рухомій рамі 14 l = lc = ∆ F C c (6) , Збоку пружних елементів 23, 24, 25, 26 до вузла закріплення 17 струнних пружних розтяжок 15, 16 прикладена сила ∆Fc ∆Fp = lc = (7) Cc , де С - коефіцієнт жорсткості пружних елементів 23, 24, 25, 26. Таким чином до струнних пружних розтяжок 15, 16 прикладені додаткові сили відповідно mS1C mS1C ∆F15 = ⋅ W, ∆F16 = − ⋅ W, (8) S0Cc S0Cc Частоту власних коливань струнної пружної розтяжки на першій гармоніці можна визначити так: F 1 F f2 = (9) 2 ml або 4ml , де F- сила натяжінна, прикладена до струнної пружної розтяжки, m - маса струнної пружної розтяжки, l - довжина активної частини струнної пружної розтяжки. При зміні сили, прикладеної до струнної пружної розтяжки, змінюється частота її власних коливань f= 1 F0 + ∆F (10) , 2 ml де F0 - сила початкового натяжіння кожної струнної пружної розтяжки. Отже, для струнних пружних розтяжок 15 і 16 можемо записати наступні співвідношення: mS1C mS1C F0 + F0 − ⋅W ⋅W S0 C S0C (11) 2 2 F15 = F16 = 4ml 4ml , , Періоди власних коливань струнних пружних розтяжок 15 і 16 знайдемо як 1 1 T18 = T19 = f15 f16 , або f = f0 + ∆f = T15 ⎡ mS1C F0 + ⋅W ⎢ S0C 1 =⎢ ⎢2 4ml ⎢ ⎢ ⎣ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ −1 (12) , 5 T16 ⎡ mS1C F0 − ⋅W ⎢ S0C ⎢1 = ⎢2 4ml ⎢ ⎢ ⎣ 45150 ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ −1 , Вихідний сигнал 31 датчика - кількість імпульсів автогенератора заповнюючих імпульсів високої частоти за половину періоду коливань струнної пружної розтяжки, буде дорівнювати відповідно для кожної струнної пружної розтяжки 15 і 16 n15 = 1 fT15 2 n16 = ⎡ mS1C F0 + ⋅W ⎢ S0C 1 ⎢1 = f⎢ 2 2 4ml ⎢ ⎢ ⎣ 1 fT16 2 ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ −1 , ⎡ mS1C F0 − ⋅W ⎢ S0C 1 ⎢1 = f 2 ⎢2 4ml ⎢ ⎢ ⎣ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ −1 (13) , де f - частота заповнюючих імпульсів генератора 32. Комп’ютерна верстка Л. Купенко 6 Тобто вихідний сигнал вміщує інформацію про прискорення W, яке вимірюється. Таким чином, використання в датчику лінійних прискорень камери, в якій розміщено ще одну пластину, ідентичну першій, дві гідравлічні магістралі, що з'єднують камеру з першим і другим гідроциліндрами із сильфонами в торцях, кожний з яких зв'язаний через жорсткий шток з рухомою рамою розміщеного за межами камери струнного частотного перетворювача, струнні пружні розтяжки, якого закріплені одними своїми кінцями на рухомому центральному вузлі закріплення, а другими кінцями - на нерухомих вузлах закріплення, розташованих на нерухомій рамі, дозволяє досягти наступного позитивного результату: 1. Підвищення чутливості датчика лінійних прискорень. 2. Забезпечення порогу чутливості датчика, який обумовлений тільки система обробки інформації 3. Можливість широкого вибору габаритів та розміщення камери з рідиною як інерційного масою у відповідному місці рухомого об'єкта, ніяк не зв'язаному з прецизійними перетворювачами інформації. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator of linear accelerations
Автори англійськоюHordin Oleksandr Hryhorovych, Kletsko Veronika Serhiivna
Назва патенту російськоюДатчик линейных ускорений
Автори російськоюГордин Александр Григорьевич, Клецько Вероника Сергеевна
МПК / Мітки
МПК: G01P 15/00
Мітки: лінійних, датчик, прискорень
Код посилання
<a href="https://ua.patents.su/3-45150-datchik-linijjnikh-priskoren.html" target="_blank" rel="follow" title="База патентів України">Датчик лінійних прискорень</a>
Датчик лінійних переміщень
Номер патенту: 37760
Опубліковано: 10.12.2008
Автори: Гордін Олександр Григорович, Рева Вікторія Валеріївна
МПК: G01B 21/00
Мітки: лінійних, датчик, переміщень
Формула / Реферат:
Датчик лінійних переміщень, що містить корпус, напрямну призму, ролик і систему обробки інформації, яка включає дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно...
Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Автори: Скічко Юлія Іванівна, Гордін Олександр Григорович
МПК: G01B 21/00
Мітки: переміщень, датчик, лінійних
Формула / Реферат:
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими -...
Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Гордін Олександр Григорович, Тимченко Марина Юріївна
МПК: G01B 7/30
Мітки: кутових, датчик, переміщень
Формула / Реферат:
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки,...
Датчик кутових переміщень
Номер патенту: 37455
Опубліковано: 25.11.2008
Автори: Гордін Олександр Григорович, Савостьянова Анна Олегівна
МПК: G01B 7/30
Мітки: переміщень, датчик, кутових
Формула / Реферат:
Датчик кутових переміщень, що містить корпус, кругову напрямну призму, рухому каретку, рухому раму, струнний перетворювач інформації та систему обробки інформації, який відрізняється тим, що кругова напрямна призма є нерухомою, виконана ще одна рухома каретка, розташована під кутом 90 ° відносно першої, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим...
Індуктивний датчик лінійних переміщень

Номер патенту: 3418
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 5/14
Мітки: переміщень, датчик, індуктивний, лінійних
Формула / Реферат:
Индуктивный датчик линейных перемeщений, содержащий корпус, смонтированные в нем соосные катушки индуктивностей, коаксиально установленный в них якорь, установленный в корпусе с помощью шарнира измерительный рычаг, один конец которого скреплен с якорем, закрепленный на другом конце измерительного рычага щуп и средство крепления на объекте контроля, отличающийся тем, что, с целью упрощения конструкции и повышения удобств при эксплуатации,...
Попередній патент: Відмовостійкий блок датчиків кутових швидкостей
Наступний патент: Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження
Випадковий патент: Трансплантат для виконання лапароскопічної герніопластики вентральних, пупкових гриж та гриж білої лінії живота