Спосіб розпізнавання групових точкових об`єктів
Формула / Реферат
Спосіб розпізнавання групових точкових об'єктів (ГТО), який відрізняється тим, що базується на визначенні значень та напрямків радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів, які обчислюються за формулами ![]() , де
, де ![]() ,
, ![]() - центр тяжіння групи інформаційних елементів ГТО,
- центр тяжіння групи інформаційних елементів ГТО, ![]() ,
, ![]() - центр тяжіння
- центр тяжіння ![]() -гo інформаційного елемента ГТО та
-гo інформаційного елемента ГТО та
 ,
,
де ![]() ,
, ![]() - центр ваги групи інформаційних елементів ГТО (без обліку базових рядка й стовпця),
- центр ваги групи інформаційних елементів ГТО (без обліку базових рядка й стовпця), ![]() ,
, ![]() - центр ваги елементів базових елементів ГТО,
- центр ваги елементів базових елементів ГТО, ![]() ,
, ![]() - центр ваги
- центр ваги ![]() -гo інформаційного елемента (
-гo інформаційного елемента (![]() ; де
; де ![]() - кількість інформаційних елементів ГТО), та дозволяє враховувати складні афінні перетворення та нелінійні перекручення ГТО, завдяки нормалізації та ранжуванню його ознак.
- кількість інформаційних елементів ГТО), та дозволяє враховувати складні афінні перетворення та нелінійні перекручення ГТО, завдяки нормалізації та ранжуванню його ознак.
Текст
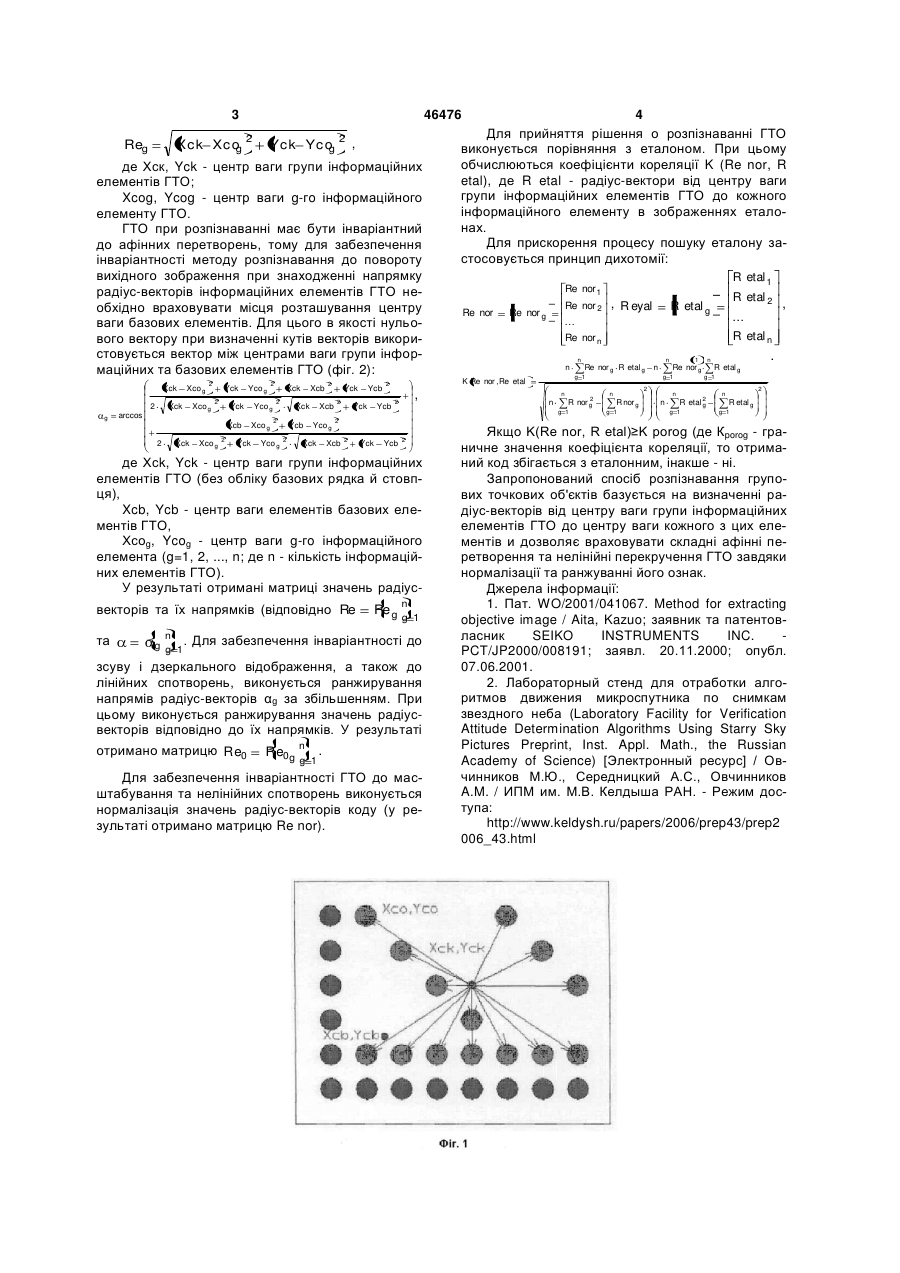
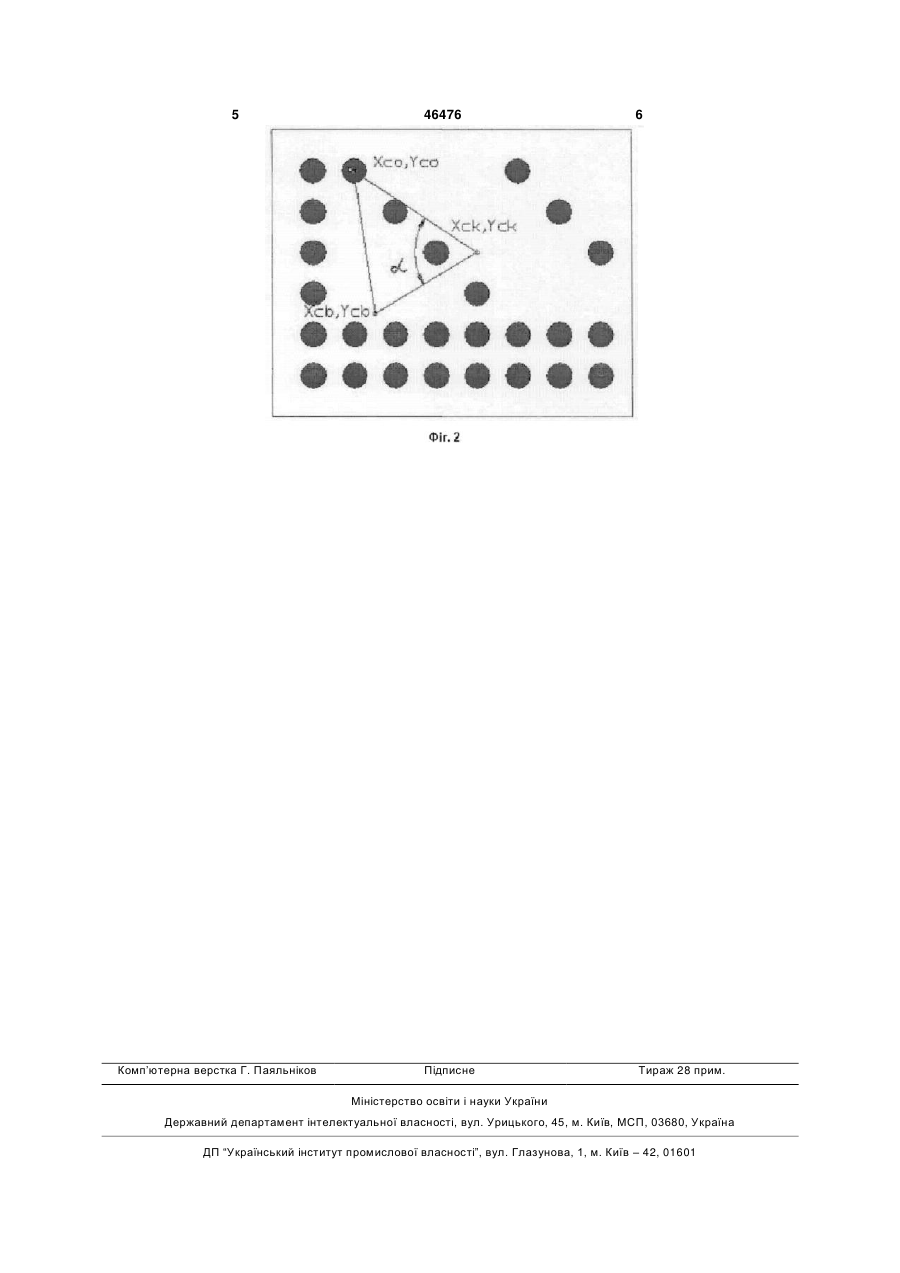
Спосіб розпізнавання групових точкових об'єктів (ГТО), який відрізняється тим, що базується на визначенні значень та напрямків радіусвекторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів, які обчислюються за формулами Reg Xck Xco 2 g Yck Yco 2 , де Xck , Yck g 2 Xck 2 g Xco g Xck arccos 2 Xco g Yck 2 Yck Xcb 2 Xck Xco g Yco g 2 2 Yco g Xco g Yck Xck 2 Ycb 2 2 Yck Xcb 2 Yco g Ycb 2 , 2 Xck 2 Yco g Xcb Xck Xcb Yck 2 Yck Ycb 2 Ycb 2 де Xck , Yck - центр ваги групи інформаційних елементів ГТО (без обліку базових рядка й стовпця), Xcb , Ycb - центр ваги елементів базових елементів ГТО, Xco g , Yco g - центр ваги g -гo ін, формаційного елемента ( g 1 2,...,n ; де n - кількість інформаційних елементів ГТО), та дозволяє враховувати складні афінні перетворення та нелінійні перекручення ГТО, завдяки нормалізації та ранжуванню його ознак. 46476 (11) UA рення та нелінійні перекручення ГТО, а також результат розпізнання дуже сильно залежать від положення камери, тому кожного разу перед початком моделювання ідентифікації зірок доводиться уточнювати положення камери щодо знімка. А це приводить до збільшення часу проведення процесу розпізнавання та погрішності отриманого результату. Запропонований спосіб розпізнавання ГТО враховує їх складні афінні перетворення та нелінійні перекручення. Поставлена задача вирішується завдяки знаходженню значень та напрямків радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементу, їх ранжируванні та нормалізації. На фіг. 1 представлено зображення ГТО, який складається з базових елементів (в даному випадку це крайній стовпець і нижній рядок) і інформаційних. Базові елементи ГТО є орієнтиром при пошуку інформаційних елементів в процесі розпізнавання. Значення радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів обчислюється за формулою (19) Корисна модель відноситься до області оптичної обробки зображень об'єктів та їх розпізнавання і може бути використана для розпізнавання групових точкових та їх розпізнавання і може бути використана для розпізнавання групових точкових об'єктів (ГТО), у першу чергу для тих, які мають складні афінні перетворення та нелінійні перекручення. Відомий спосіб розпізнавання об'єктів на отриманому зображенні, який базується на точному визначенні позиції кожного пікселя елементу об'єкту [1]. Недоліком цього способу є складність розпізнавання при великих розмірах зображення або великої кількості об'єктів, а також низька швидкодія. Найбільш близьким аналогом до розробленого способу розпізнавання є спосіб, який використовується для ідентифікації зірок на знімку [2]. Спосіб заснований на отриманні координат зірок і знаходженні косинусів для кожної пари зірок. Для зниження погрішності визначення місця розташування зірок введені координати точки Весняного рівнодення. До недоліків цього способу відноситися те, що цей спосіб не враховує складні афінні перетво (13) U - центр тяжіння групи інформаційних елементів ГТО, Xcog , Ycog - центр тяжіння g -гo інформаційного елемента ГТО та 3 46476 Xck Xco 2 g Reg Yck Yco 2 , g де Хск, Yck - центр ваги групи інформаційних елементів ГТО; Xcog, Ycog - центр ваги g-гo інформаційного елементу ГТО. ГТО при розпізнаванні має бути інваріантний до афінних перетворень, тому для забезпечення інваріантності методу розпізнавання до повороту вихідного зображення при знаходженні напрямку радіус-векторів інформаційних елементів ГТО необхідно враховувати місця розташування центру ваги базових елементів. Для цього в якості нульового вектору при визначенні кутів векторів використовується вектор між центрами ваги групи інформаційних та базових елементів ГТО (фіг. 2): Xck 2 g Xco g Xck arccos 2 Xco g Yck 2 Yck Xcb 2 Xck Xco g Yco g 2 2 Yco g Xco g Yck Xck 2 Ycb 2 2 Yck Xcb 2 Yco g Ycb , Xck Xcb Yck 2 Ycb Yck 2 Ycb де Хсk, Yck - центр ваги групи інформаційних елементів ГТО (без обліку базових рядка й стовпця), Xcb, Ycb - центр ваги елементів базових елементів ГТО, Хсоg, Ycog - центр ваги g-гo інформаційного елемента (g=1, 2, ..., n; де n - кількість інформаційних елементів ГТО). У результаті отримані матриці значень радіусвекторів та їх напрямків (відповідно Re та n g g 1. Re g n g 1 Для забезпечення інваріантності до зсуву і дзеркального відображення, а також до лінійних спотворень, виконується ранжирування напрямів радіус-векторів αg за збільшенням. При цьому виконується ранжирування значень радіусвекторів відповідно до їх напрямків. У результаті отримано матрицю Re0 Re nor Re nor 2 Re nor g Re0g n . g 1 Для забезпечення інваріантності ГТО до масштабування та нелінійних спотворень виконується нормалізація значень радіус-векторів коду (у результаті отримано матрицю Re nor). , R eyal R etal 2 R etal g R etal n Re nor n n n n 11 n Re nor g R etal g n g 1 n 2 R nor g , ... ... g 1 2 R etal 1 Re nor 1 K Re nor , Re etal 2 2 Xck 2 Yco g Xcb 4 Для прийняття рішення о розпізнаванні ГТО виконується порівняння з еталоном. При цьому обчислюються коефіцієнти кореляції K (Re nor, R etal), де R etal - радіус-вектори від центру ваги групи інформаційних елементів ГТО до кожного інформаційного елементу в зображеннях еталонах. Для прискорення процесу пошуку еталону застосовується принцип дихотомії: Re nor g g 1 2 n R nor g g 1 n n . n R etal g g 1 R etal 2 g g 1 2 n R etal g g 1 Якщо K(Re nor, R etal)≥K porog (де Кporog - граничне значення коефіцієнта кореляції, то отриманий код збігається з еталонним, інакше - ні. Запропонований спосіб розпізнавання групових точкових об'єктів базується на визначенні радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів и дозволяє враховувати складні афінні перетворення та нелінійні перекручення ГТО завдяки нормалізації та ранжуванні його ознак. Джерела інформації: 1. Пат. WO/2001/041067. Method for extracting objective image / Aita, Kazuo; заявник та патентовласник SEIKO INSTRUMENTS INC. PCT/JP2000/008191; заявл. 20.11.2000; опубл. 07.06.2001. 2. Лабораторный стенд для отработки алгоритмов движения микроспутника по снимкам звездного неба (Laboratory Facility for Verification Attitude Determination Algorithms Using Starry Sky Pictures Preprint, Inst. Appl. Math., the Russian Academy of Science) [Электронный ресурс] / Овчинников М.Ю., Середницкий А.С., Овчинников A.M. / ИПМ им. М.В. Келдыша РАН. - Режим доступа: http://www.keldysh.ru/papers/2006/prep43/prep2 006_43.html 5 Комп’ютерна верстка Г. Паяльніков 46476 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRecognition method of group point objects
Автори англійськоюDubrovkina Marharyta Vasylivna
Назва патенту російськоюСпособ распознавания групповых точечных объектов
Автори російськоюДубровкина Маргарита Васильевна
МПК / Мітки
МПК: G06K 9/00
Мітки: точкових, об'єктів, спосіб, розпізнавання, групових
Код посилання
<a href="https://ua.patents.su/3-46476-sposib-rozpiznavannya-grupovikh-tochkovikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання групових точкових об`єктів</a>
Система розпізнавання групових точкових об’єктів
Номер патенту: 46187
Опубліковано: 10.12.2009
Автор: Дубровкіна Маргарита Василівна
МПК: G06K 9/00
Мітки: розпізнавання, групових, об'єктів, точкових, система
Формула / Реферат:
Система розпізнавання групових точкових об'єктів (ГТО), яка забезпечує достовірність розпізнавання ГТО з урахуванням не тільки світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів, але і складних афінних перетворень та нелінійних перекручень ГТО, яка відрізняється тим, що система розпізнавання групових точкових об'єктів має в своєму складі пристрій отримання зображення ГТО, блок обробки та блок живлення, також...
Спосіб радіолокаційного розпізнавання об’єктів
Номер патенту: 17731
Опубліковано: 16.10.2006
Автори: Булай Андрій Миколайович, Обод Іван Іванович, Овсянніков Петро Васильович
МПК: G01S 13/00
Мітки: радіолокаційного, об'єктів, розпізнавання, спосіб
Формула / Реферат:
Радіолокаційний спосіб розпізнавання об’єктів, який полягає в тому, що запитником випромінюють кодовий сигнал запиту, код якого визначають за кодом шкали часу системи розпізнавання, який приймають відповідачем, порівнюють його з діючим кодовим сигналом запиту у даний момент часу, код сигналу відповіді визначають за кодом шкали часу системи розпізнавання, який приймають запитником і порівнюють його з діючим кодовим сигналом відповіді у даний...
Спосіб логічного розпізнавання об’єктів
Номер патенту: 82212
Опубліковано: 25.03.2008
Автор: Білозерський Леонід Анатолійович
МПК: G06K 9/68
Мітки: спосіб, розпізнавання, логічного, об'єктів
Формула / Реферат:
Спосіб логічного розпізнавання об'єктів, що полягає у виборі логічних ознак для заданого складу класів об'єктів, у визначенні логічних ознак невідомого розпізнаваного об'єкта, генерації логічних описів класів, виконанні розпізнавання невідомого об'єкта, який відрізняється тим, що для визначення логічних ознак використовують інформацію фізичних вимірників і їхніх комбінацій, виділяють ni специфічних логічних ознак, властивих кожному і-му...
Оптичний пристрій для розпізнавання об’єктів

Номер патенту: 33398
Опубліковано: 25.06.2008
Автор: Запольський Леонід Леонідович
МПК: G01B 11/00
Мітки: об'єктів, пристрій, розпізнавання, оптичний
Формула / Реферат:
Оптичний пристрій для розпізнавання об'єктів, що містить газовий лазер, ротор, що обертається з набором дзеркал, напівпрозоре дзеркало, телекамеру, яка знаходиться над об'єктом, який відрізняється тим, що напівпрозоре дзеркало виконано рухомим у горизонтальній та вертикальній площинах, при цьому нахил грані поверхні і її відстань до камери L1 розраховують за...
Пристрій для розпізнавання симетричності зображень об’єктів
Номер патенту: 52678
Опубліковано: 15.01.2003
Автори: Кожем'яко Андрій Вікторович, Мартинюк Тетяна Борисівна, Буда Антоніна Героніївна, Буда Сергій Анатолійович, Андрущенко Володимир Іванович
МПК: G06K 9/00, G06K 9/58, G06K 9/52, G06K 11/00
Мітки: розпізнавання, зображень, об'єктів, пристрій, симетричності
Формула / Реферат:
Пристрій для розпізнавання симетричності зображень об'єктів, що містить перший блок зміщення зображення, оптичний вхід якого є інформаційним входом пристрою, блок повороту зображення, другий блок зміщення зображення, перший та другий мультиплікатори світлового потоку, послідовно розміщені на одній оптичній осі з першим та другим блоками зміщення зображення, перший та другий формувачі сигналів статичних моментів, що містять блок заміни...
Попередній патент: Теплоізоляційна, антикорозійна та вогнезахисна фарба
Наступний патент: Спосіб адаптивної адресації вузлів телекомунікаційних пакетних мереж
Випадковий патент: Спосіб визначення термінів захоронень за змінами біофізичних властивостей тканини трупа