Система розпізнавання групових точкових об’єктів
Формула / Реферат
Система розпізнавання групових точкових об'єктів (ГТО), яка забезпечує достовірність розпізнавання ГТО з урахуванням не тільки світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів, але і складних афінних перетворень та нелінійних перекручень ГТО, яка відрізняється тим, що система розпізнавання групових точкових об'єктів має в своєму складі пристрій отримання зображення ГТО, блок обробки та блок живлення, також конструкція пристрою отримання зображення складається з відеокамери (для отримання зображення ГТО) та системи підсвічування, яка має в своєму складі верхнє і бокове підсвічування та набір світлофільтрів (для поліпшення зображення ГТО апаратними засобами), а конструкція блока обробки має в своєму складі модуль програмної обробки зображення (для поліпшення зображення ГТО програмними засобами) та модуль розпізнавання ГТО (для забезпечення достовірності розпізнавання з урахуванням складних афінних перетворень та нелінійних перекручень) і базу даних (для занесення отриманих даних), та тим, що достовірність розпізнавання ГТО забезпечується комплексно апаратними та програмними засобами системи розпізнавання ГТО, які описані за допомогою адаптивного алгоритму, зокрема, на етапі отримання зображення, при цьому виконується його поліпшення з урахуванням світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів завдяки вибору необхідного підсвічування та світлофільтра і додаткове поліпшення зображення програмними засобами (за допомогою модуля програмної обробки зображення) для тих ГТО, для яких недостатньо поліпшення апаратними засобами, а на етапі розпізнавання виконується розпізнавання ГТО з урахуванням його складних афінних перетворень та нелінійних перекручень за допомогою модуля розпізнавання ГТО та додаткового процесу В, який включений в адаптивний алгоритм роботи системи розпізнавання ГТО.
Текст
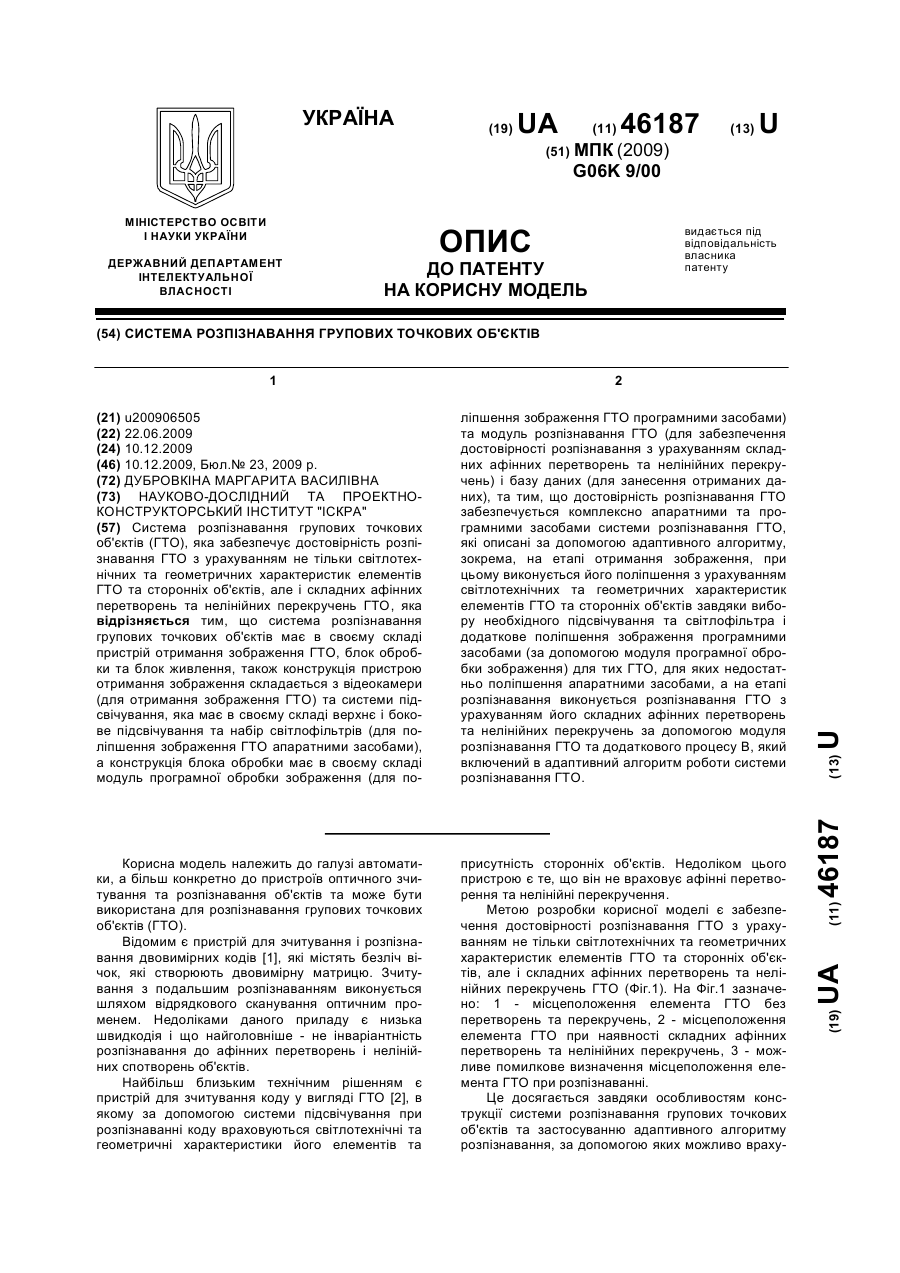
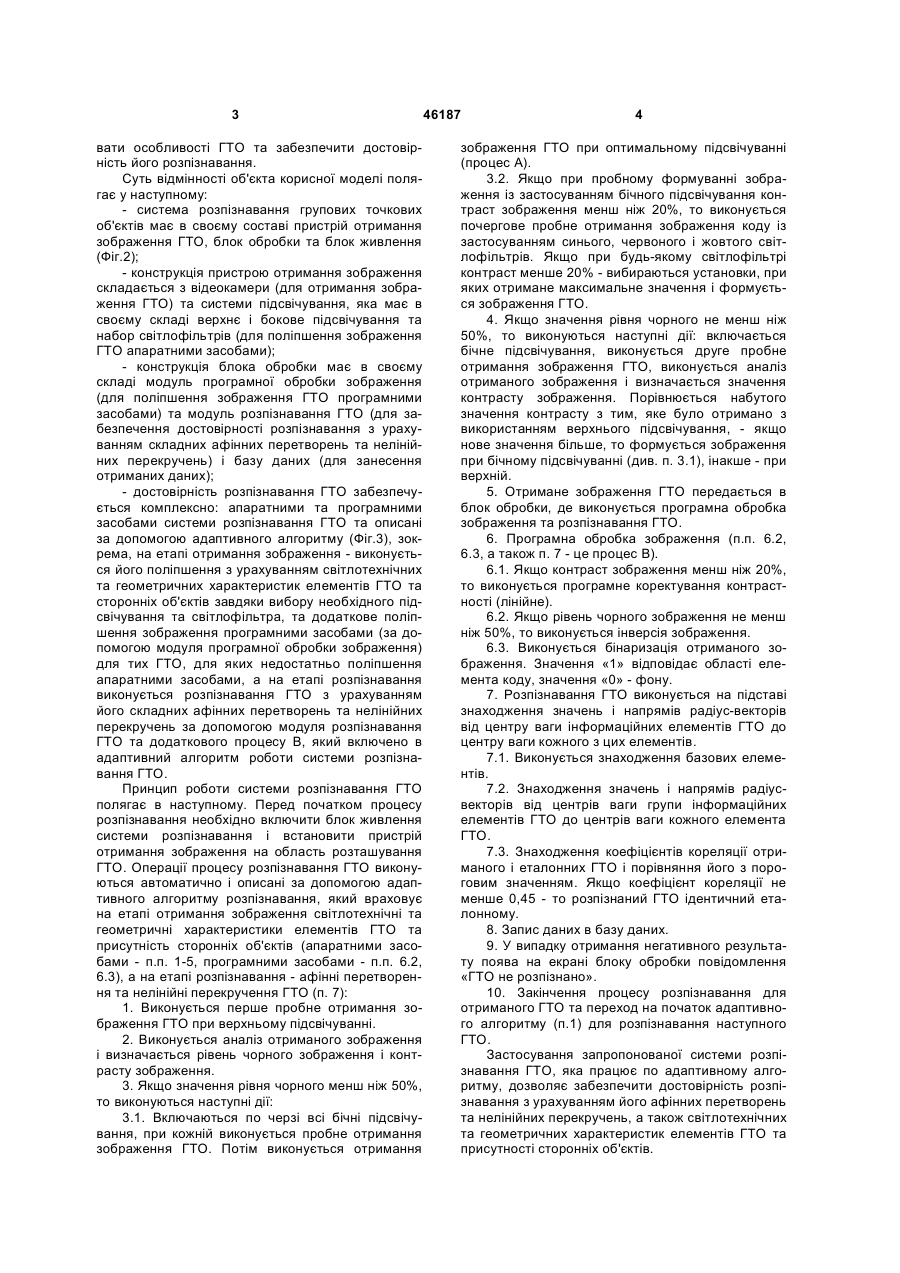
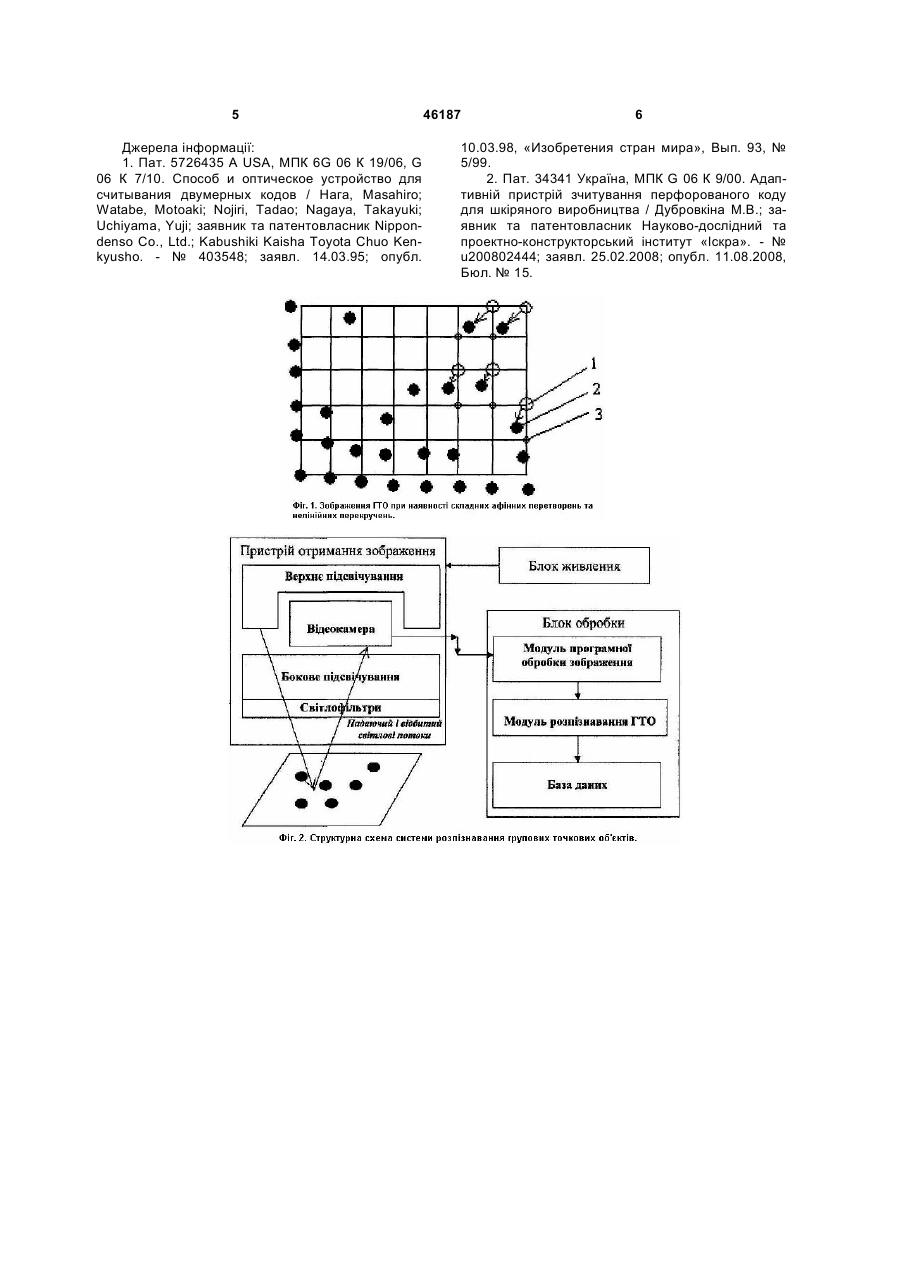
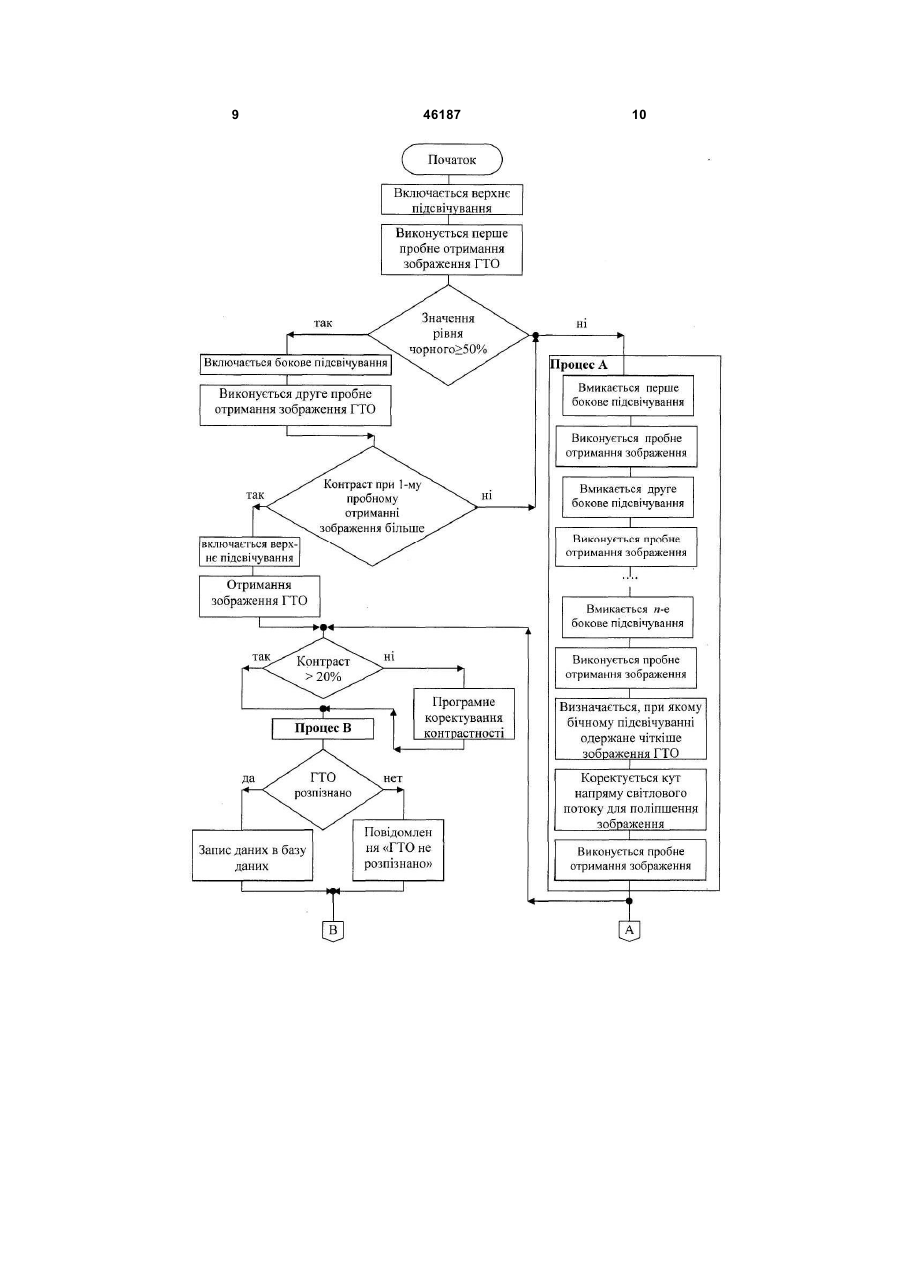
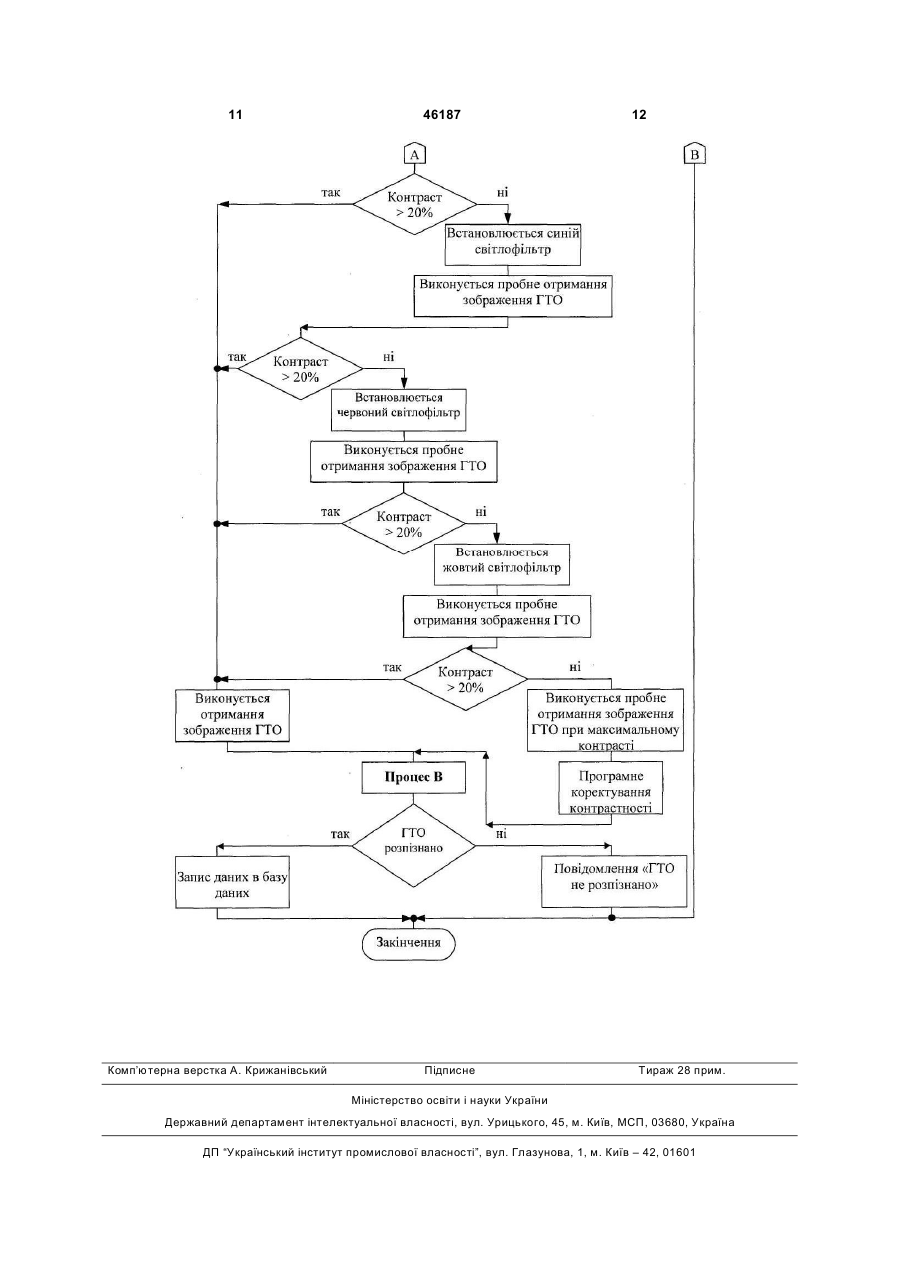
Система розпізнавання групових точкових об'єктів (ГТО), яка забезпечує достовірність розпізнавання ГТО з урахуванням не тільки світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів, але і складних афінних перетворень та нелінійних перекручень ГТО, яка відрізняється тим, що система розпізнавання групових точкових об'єктів має в своєму складі пристрій отримання зображення ГТО, блок обробки та блок живлення, також конструкція пристрою отримання зображення складається з відеокамери (для отримання зображення ГТО) та системи підсвічування, яка має в своєму складі верхнє і бокове підсвічування та набір світлофільтрів (для поліпшення зображення ГТО апаратними засобами), а конструкція блока обробки має в своєму складі модуль програмної обробки зображення (для по U 2 (19) 1 3 вати особливості ГТО та забезпечити достовірність його розпізнавання. Суть відмінності об'єкта корисної моделі полягає у наступному: - система розпізнавання групових точкових об'єктів має в своєму составі пристрій отримання зображення ГТО, блок обробки та блок живлення (Фіг.2); - конструкція пристрою отримання зображення складається з відеокамери (для отримання зображення ГТО) та системи підсвічування, яка має в своєму складі верхнє і бокове підсвічування та набор світлофільтрів (для поліпшення зображення ГТО апаратними засобами); - конструкція блока обробки має в своєму складі модуль програмної обробки зображення (для поліпшення зображення ГТО програмними засобами) та модуль розпізнавання ГТО (для забезпечення достовірності розпізнавання з урахуванням складних афінних перетворень та нелінійних перекручень) і базу даних (для занесення отриманих даних); - достовірність розпізнавання ГТО забезпечується комплексно: апаратними та програмними засобами системи розпізнавання ГТО та описані за допомогою адаптивного алгоритму (Фіг.3), зокрема, на етапі отримання зображення - виконується його поліпшення з урахуванням світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів завдяки вибору необхідного підсвічування та світлофільтра, та додаткове поліпшення зображення програмними засобами (за допомогою модуля програмної обробки зображення) для тих ГТО, для яких недостатньо поліпшення апаратними засобами, а на етапі розпізнавання виконується розпізнавання ГТО з урахуванням його складних афінних перетворень та нелінійних перекручень за допомогою модуля розпізнавання ГТО та додаткового процесу В, який включено в адаптивний алгоритм роботи системи розпізнавання ГТО. Принцип роботи системи розпізнавання ГТО полягає в наступному. Перед початком процесу розпізнавання необхідно включити блок живлення системи розпізнавання і встановити пристрій отримання зображення на область розташування ГТО. Операції процесу розпізнавання ГТО виконуються автоматично і описані за допомогою адаптивного алгоритму розпізнавання, який враховує на етапі отримання зображення світлотехнічні та геометричні характеристики елементів ГТО та присутність сторонніх об'єктів (апаратними засобами - п.п. 1-5, програмними засобами - п.п. 6.2, 6.3), а на етапі розпізнавання - афінні перетворення та нелінійні перекручення ГТО (п. 7): 1. Виконується перше пробне отримання зображення ГТО при верхньому підсвічуванні. 2. Виконується аналіз отриманого зображення і визначається рівень чорного зображення і контрасту зображення. 3. Якщо значення рівня чорного менш ніж 50%, то виконуються наступні дії: 3.1. Включаються по черзі всі бічні підсвічування, при кожній виконується пробне отримання зображення ГТО. Потім виконується отримання 46187 4 зображення ГТО при оптимальному підсвічуванні (процес А). 3.2. Якщо при пробному формуванні зображення із застосуванням бічного підсвічування контраст зображення менш ніж 20%, то виконується почергове пробне отримання зображення коду із застосуванням синього, червоного і жовтого світлофільтрів. Якщо при будь-якому світлофільтрі контраст менше 20% - вибираються установки, при яких отримане максимальне значення і формується зображення ГТО. 4. Якщо значення рівня чорного не менш ніж 50%, то виконуються наступні дії: включається бічне підсвічування, виконується друге пробне отримання зображення ГТО, виконується аналіз отриманого зображення і визначається значення контрасту зображення. Порівнюється набутого значення контрасту з тим, яке було отримано з використанням верхнього підсвічування, - якщо нове значення більше, то формується зображення при бічному підсвічуванні (див. п. 3.1), інакше - при верхній. 5. Отримане зображення ГТО передається в блок обробки, де виконується програмна обробка зображення та розпізнавання ГТО. 6. Програмна обробка зображення (п.п. 6.2, 6.3, а також п. 7 - це процес В). 6.1. Якщо контраст зображення менш ніж 20%, то виконується програмне коректування контрастності (лінійне). 6.2. Якщо рівень чорного зображення не менш ніж 50%, то виконується інверсія зображення. 6.3. Виконується бінаризація отриманого зображення. Значення «1» відповідає області елемента коду, значення «0» - фону. 7. Розпізнавання ГТО виконується на підставі знаходження значень і напрямів радіус-векторів від центру ваги інформаційних елементів ГТО до центру ваги кожного з цих елементів. 7.1. Виконується знаходження базових елементів. 7.2. Знаходження значень і напрямів радіусвекторів від центрів ваги групи інформаційних елементів ГТО до центрів ваги кожного елемента ГТО. 7.3. Знаходження коефіцієнтів кореляції отриманого і еталонних ГТО і порівняння його з пороговим значенням. Якщо коефіцієнт кореляції не менше 0,45 - то розпізнаний ГТО ідентичний еталонному. 8. Запис даних в базу даних. 9. У випадку отримання негативного результату поява на екрані блоку обробки повідомлення «ГТО не розпізнано». 10. Закінчення процесу розпізнавання для отриманого ГТО та переход на початок адаптивного алгоритму (п.1) для розпізнавання наступного ГТО. Застосування запропонованої системи розпізнавання ГТО, яка працює по адаптивному алгоритму, дозволяє забезпечити достовірність розпізнавання з урахуванням його афінних перетворень та нелінійних перекручень, а також світлотехнічних та геометричних характеристик елементів ГТО та присутності сторонніх об'єктів. 5 Джерела інформації: 1. Пат. 5726435 A USA, МПК 6G 06 К 19/06, G 06 К 7/10. Способ и оптическое устройство для считывания двумерных кодов / Нага, Masahiro; Watabe, Motoaki; Nojiri, Tadao; Nagaya, Takayuki; Uchiyama, Yuji; заявник та патентовласник Nippondenso Co., Ltd.; Kabushiki Kaisha Toyota Chuo Kenkyusho. - № 403548; заявл. 14.03.95; опубл. 46187 6 10.03.98, «Изобретения стран мира», Вып. 93, № 5/99. 2. Пат. 34341 Україна, МПК G 06 К 9/00. Адаптивній пристрій зчитування перфорованого коду для шкіряного виробництва / Дубровкіна М.В.; заявник та патентовласник Науково-дослідний та проектно-конструкторський інститут «Іскра». - № u200802444; заявл. 25.02.2008; опубл. 11.08.2008, Бюл. № 15. 7 46187 8 9 46187 10 11 Комп’ютерна верстка А. Крижанівський 46187 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGroup point object recognition system
Автори англійськоюDubrovkina Marharyta Vasylivna
Назва патенту російськоюСистема распознавания групповых точечных объектов
Автори російськоюДубровкина Маргарита Васильевна
МПК / Мітки
МПК: G06K 9/00
Мітки: об'єктів, точкових, розпізнавання, система, групових
Код посилання
<a href="https://ua.patents.su/6-46187-sistema-rozpiznavannya-grupovikh-tochkovikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Система розпізнавання групових точкових об’єктів</a>
Спосіб радіолокаційного розпізнавання об’єктів
Номер патенту: 17731
Опубліковано: 16.10.2006
Автори: Булай Андрій Миколайович, Обод Іван Іванович, Овсянніков Петро Васильович
МПК: G01S 13/00
Мітки: радіолокаційного, спосіб, розпізнавання, об'єктів
Формула / Реферат:
Радіолокаційний спосіб розпізнавання об’єктів, який полягає в тому, що запитником випромінюють кодовий сигнал запиту, код якого визначають за кодом шкали часу системи розпізнавання, який приймають відповідачем, порівнюють його з діючим кодовим сигналом запиту у даний момент часу, код сигналу відповіді визначають за кодом шкали часу системи розпізнавання, який приймають запитником і порівнюють його з діючим кодовим сигналом відповіді у даний...
Система розпізнавання
Номер патенту: 10887
Опубліковано: 25.12.1996
Автори: Толюпа Сергій Васильович, Новіков Володимир Пилипович, Балаба Валерій Акімович, Кулініч Олег Миколайович, Ляшенко Іван Сергійович, Берека Сергій Валерійович
МПК: G01S 13/78, G01S 13/02
Мітки: розпізнавання, система
Формула / Реферат:
Система распознавания, содержащая антенну и последовательно соединенные аналого-цифровой преобразователь и первый блок сдвигающих регистров, вход синхронизатора которого соединен с трактирующим входом аналого-цифрового преобразователя, входом второго блока задержки и выходом первого блока задержки, вход которого соединен с выходом первого элемента II, первый вход которого соединен с входом элемента НЕ, вторым входом ключа, входом установки...
Оптичний пристрій для розпізнавання об’єктів

Номер патенту: 33398
Опубліковано: 25.06.2008
Автор: Запольський Леонід Леонідович
МПК: G01B 11/00
Мітки: оптичний, пристрій, об'єктів, розпізнавання
Формула / Реферат:
Оптичний пристрій для розпізнавання об'єктів, що містить газовий лазер, ротор, що обертається з набором дзеркал, напівпрозоре дзеркало, телекамеру, яка знаходиться над об'єктом, який відрізняється тим, що напівпрозоре дзеркало виконано рухомим у горизонтальній та вертикальній площинах, при цьому нахил грані поверхні і її відстань до камери L1 розраховують за...
Головний лінійний пристрій, пристрій обслуговування групових ліній і спосіб керування пристроєм обслуговування групових ліній
Номер патенту: 32540
Опубліковано: 15.02.2001
Автори: Хааг Кенет Вільсон, Лью Шен-Чанг, Петерс Джім Дюард
МПК: H04Q 11/04, H04M 13/00, H04L 12/66
Мітки: пристрій, головний, керування, спосіб, групових, обслуговування, лінійний, ліній, пристроєм
Текст:
...присвоенный номер для управляющих ячеек типа данных используется для обеспечения, что сообщения прибывают в правильной последовательности, и что сообщения не потеряны при передаче Адрес устройства, используемый в заголовке, идентифицирует периферийное устройство в дистанционной линейной группе, которой соответствующее сообщение данных должно быть послано 32540 Например, адрес может указывать HLSC 130-А один из линейных блоков или модуль...
Спосіб розпізнавання образів в оптико-цифрових кореляторах
Номер патенту: 60820
Опубліковано: 15.12.2005
Автори: Єжов Павло Валентинович, Кузьменко Олександр Васильович, Комаров В'ячеслав Олександрович
МПК: G06E 3/00, G02B 27/46
Мітки: кореляторах, спосіб, розпізнавання, образів, оптико-цифрових
Формула / Реферат:
Спосіб розпізнавання образів в оптико-цифрових кореляторах, який складається з операцій:а) в цифрову частину корелятора вводять зображення об'єкта розпізнавання та еталонного об'єкта б) перетворюють зображення в...
Попередній патент: Установка для повітряного опріснювання води
Наступний патент: Спосіб розподіленої інкапсуляції пакетів у телекомунікаційних мережах
Випадковий патент: Спосіб лікування псоріазу