Оптичний пристрій для розпізнавання об’єктів

Формула / Реферат
Оптичний пристрій для розпізнавання об'єктів, що містить газовий лазер, ротор, що обертається з набором дзеркал, напівпрозоре дзеркало, телекамеру, яка знаходиться над об'єктом, який відрізняється тим, що напівпрозоре дзеркало виконано рухомим у горизонтальній та вертикальній площинах, при цьому нахил грані поверхні ![]() і її відстань до камери L1 розраховують за виразами:
і її відстань до камери L1 розраховують за виразами:
![]()
Текст
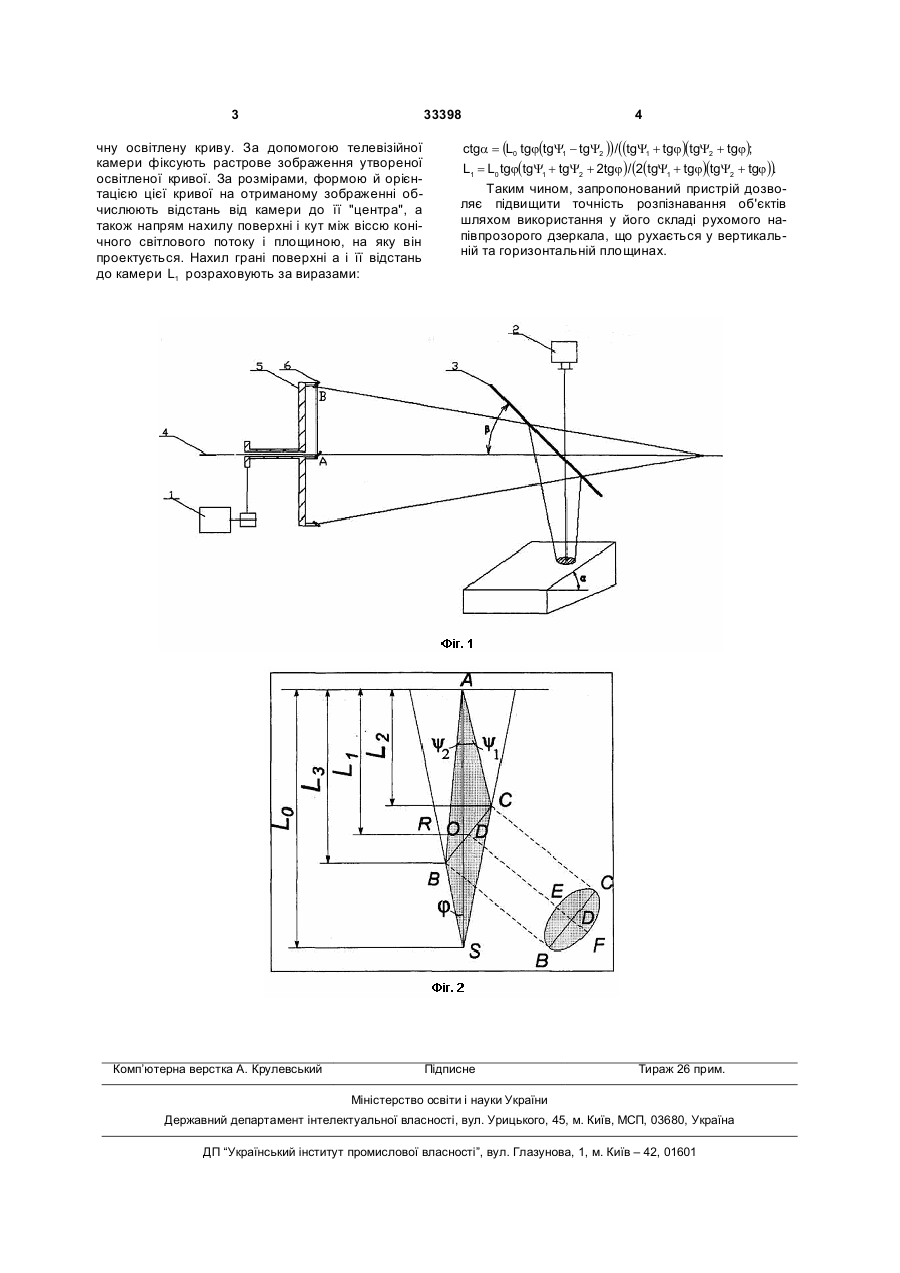
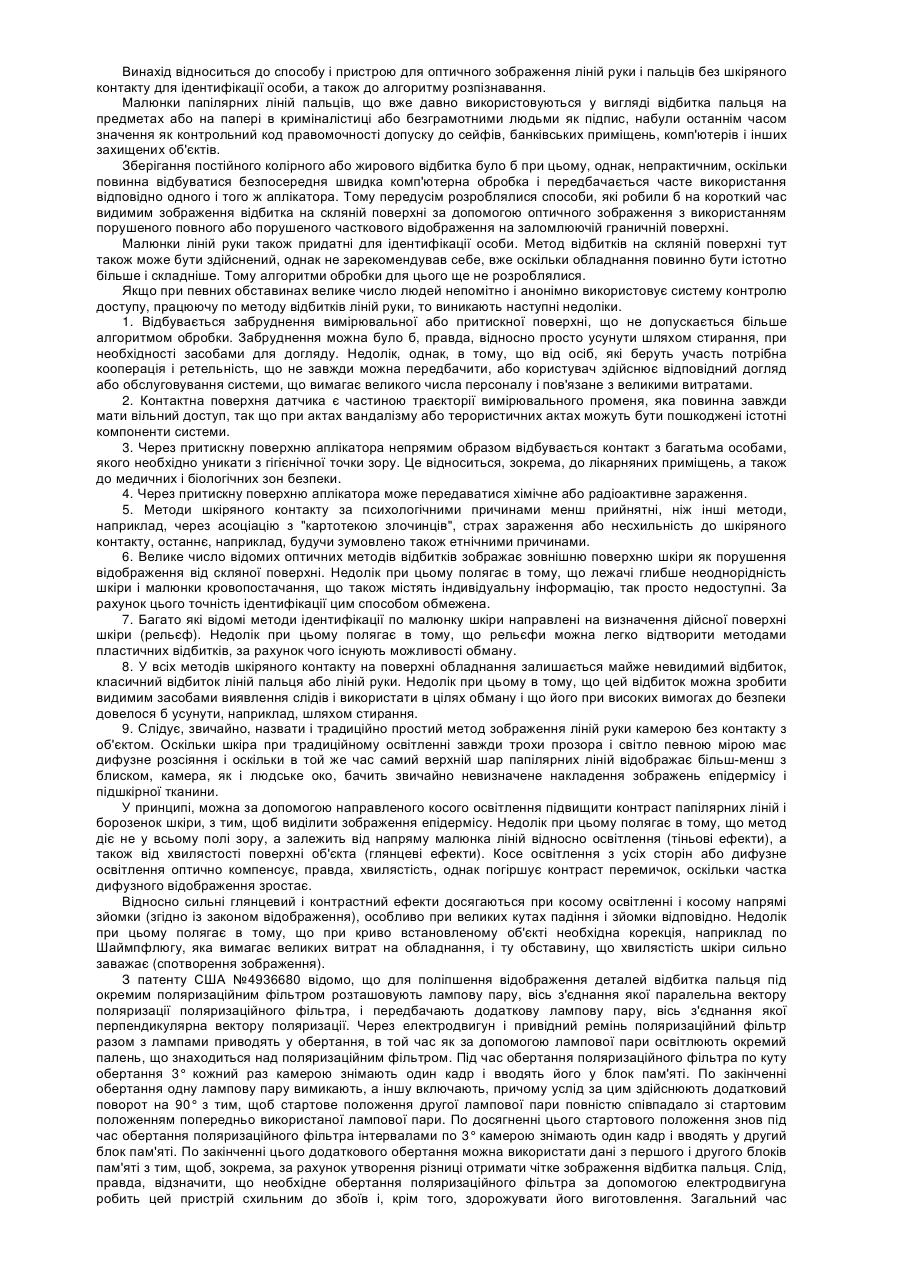
Оптичний пристрій для розпізнавання об'єктів, що містить газовий лазер, ротор, що обертається з набором дзеркал, напівпрозоре дзеркало, телека меру, яка знаходиться над об'єктом, який відрізняється тим, що напівпрозоре дзеркало виконано рухомим у горизонтальній та вертикальній площинах, при цьому нахил грані поверхні ѓї і її відстань до камери L1 розраховують за виразами: ctgѓї = (L 0 tgj(tg ѓµ - tg ѓµ ))/ ((tg ѓµ + tg j )(tg ѓµ + tg j ); 1 2 1 2 Корисна модель відноситься до області вимірювальної техніки, а саме до області оптичного приладобудування, і може бути використана, зокрема, для безконтактного розпізнавання об'єктів при русі крокуючих машин. Відомий пристрій для вимірювання малих переміщень, що складається з відбивача встановленого на об'єкті, джерела світла, розміщеного під кутом до відбивача, блока реєстрації відбитих світлових променів. Цей пристрій використовують для реалізації способу вимірювання малих переміщень [див. патент РФ №2165070,7 G01B 11/00 опублікований у 2001 році]. Найбільш близьким за технічною сутністю до пристрою, що заявляється є пристрій для розпізнавання об'єктів, що містить електродвигун, телекамеру, напівпрозоре дзеркало, газовий лазер, який створює тонкий та інтенсивний промінь світла та ротор, що обертається з набором дзеркал за допомогою якого цей промінь перетворюється в конічний потік світла [див. Дай Вей, М. Джини "Использование конического светового потока для распознавания объектов" Техническое зрение роботов/ Под ред. А. Пью; Пер. с англ. Д.Ф. Миронова; под ред. Г.П. Катыса. М.: Машиностроение, 1987. - 320 с: ил.]. Недоліком відомого пристрою є недостатня точність розпізнавання об'єктів, що пов'язано з нерухомістю напівпрозорого дзеркала. В основу корисної моделі, що заявляється, поставлено завдання підвищення точності розпізнавання об'єктів, шляхом застосування у її конструкції напівпрозорого дзеркала, яке рухається у горизонтальній та вертикальній площинах. Суть корисної моделі пояснюється кресленнями Фіг.1 та Фіг.2. На Фіг.1 представлено схему оптичного пристрою для розпізнавання об'єктів, де 1 - електродвигун; 2 - телекамера; 3 - напівпрозоре дзеркало; 4 - газовий лазер; 5 - ротор; 6 - набір дзеркал. На Фіг.2 наведено схему для визначення необхідних співвідношень між оптичним пристроєм для розпізнавання об'єктів та досліджуваним об'єктом, де S - вершина конічного світлового потоку; j - половина кута при вершині конічного світлового потоку; L0 - відстань між точками S і А; ВЕСГ - еліпс утворений перетинанням світлового потоку і верхньої площини об'єкта; Y1 і Y2 - кути між віссю AS і відрізками АС і АВ; L1 - відстань між камерою і точкою D. Оптичний пристрій для розпізнавання об'єктів складається з електродвигуна 1, телекамери 2, рухомого напівпрозорого дзеркала 3, газового лазера 4, ротору 5 та набору дзеркал 6. Пристрій працює таким чином. Для генерації конічного світлового потоку застосовують гелієвонеоновий лазер 4, що створює тонкий і інтенсивний промінь світла. Цей промінь перетворюється в конічний світловий потік світла за допомогою обертового ротора 5 з набором дзеркал 6 (обертання ротора здійснюється електродвигуном 1). На роторі встановлено дзеркала А і В, що змінюють напрямки променю світла. Дзеркало, що рухається у вертикальній та горизонтальній площинах 3 відбиває конічний світловий потік. Цей потік на визначеній поверхні об'єкта утворить круглу або еліпти (19) UA (11) 33398 (13) U L1 = L 0 tg j(tg ѓµ + tg ѓµ + 2tgj )/ (2 (tgѓµ + tgj )(tgѓµ + tg j)). 1 2 1 2 3 33398 чну освітлену криву. За допомогою телевізійної камери фіксують растрове зображення утвореної освітленої кривої. За розмірами, формою й орієнтацією цієї кривої на отриманому зображенні обчислюють відстань від камери до її "центра", а також напрям нахилу поверхні і кут між віссю конічного світлового потоку і площиною, на яку він проектується. Нахил грані поверхні а і її відстань до камери L1 розраховують за виразами: Комп’ютерна верстка А. Крулевський 4 ctga = (L0 tgj(tgY1 - tgY2 )) /((tgY1 + tgj )(tgY2 + tgj); L1 = L0 tgj(tgY1 + tgY2 + 2tgj )/ (2(tgY1 + tgj)(tgY2 + tgj )). Таким чином, запропонований пристрій дозволяє підвищити точність розпізнавання об'єктів шляхом використання у його складі рухомого напівпрозорого дзеркала, що рухається у вертикальній та горизонтальній площинах. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOptical device for identification of objects
Автори англійськоюZapolskyi Leonid Leonidovych
Назва патенту російськоюОптическое устройство для распознавания объектов
Автори російськоюЗапольский Леонид Леонидович
МПК / Мітки
МПК: G01B 11/00
Мітки: пристрій, розпізнавання, об'єктів, оптичний
Код посилання
<a href="https://ua.patents.su/2-33398-optichnijj-pristrijj-dlya-rozpiznavannya-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Оптичний пристрій для розпізнавання об’єктів</a>
Спосіб та пристрій для ідентифікації особи шляхом безконтактного розпізнавання ліній руки і пальців
Номер патенту: 67772
Опубліковано: 15.07.2004
Автори: Айнігхаммер Ханс Й., Хауке Рудольф, Айнігхаммер Йєнс
МПК: A61B 5/117, G01J 4/00, G06T 7/00, G07C 9/00, G06K 9/00, G06K 9/20
Мітки: руки, ліній, розпізнавання, пристрій, особи, безконтактного, спосіб, ідентифікації, шляхом, пальців
Формула / Реферат:
1. Спосіб ідентифікації особи з використанням джерела (15) світла, поляризаційного фільтра і камери (10) шляхом оптичного безконтактного реєстрування ліній руки і/або пальця, який відрізняється тим, що для зйомки зображення лінії руки і/або пальця малюнок папілярних ліній і малюнок підшкірного шару реєструють за допомогою першого поляризаційного фільтра (17), розташованого в траєкторії освітлювальних променів, другого поляризаційного фільтра...
Пристрій для розпізнавання та обліку предметів, які рухаються за допомогою конвеєру
Номер патенту: 25625
Опубліковано: 10.08.2007
Автори: Мирна Олена Володимирівна, Тарасенко Олексій Володимирович, Гавриленко Олег Іванович, Сиротська Ольга Олександрівна
МПК: G06K 9/18
Мітки: пристрій, обліку, предметів, допомогою, конвеєру, рухаються, розпізнавання
Формула / Реферат:
Пристрій для розпізнавання та обліку предметів, які рухаються за допомогою конвеєра, що містить перетворювач сигналу, який відрізняється тим, що введені цифрова WEB-камера, комп'ютер, який містить програму обробки інформації з цифрової WEB-камери, фотодатчик, який фіксує появу нового предмета, що рухається на конвеєрі.
Пристрій для розпізнавання випадкових процесів

Номер патенту: 25008
Опубліковано: 25.07.2007
Автори: Ярова Яна Сергіївна, Подгорний Євген Іванович, Рябова Любов Володимирівна, Глухимчук Михайло Іванович
МПК: G06F 15/00
Мітки: розпізнавання, пристрій, процесів, випадкових
Формула / Реферат:
Пристрій для розпізнавання випадкових процесів, що містить два елементи затримки, блок віднімання, блок вибору максимуму, формувач квадрата першого статистичного моменту і блок ділення, який відрізняється тим, що додатково введені фільтр, інвертор, другий квадратичний формувач, два блоки підсумовування та чотиривходовий блок прийняття рішень, причому загальний вхід пристрою розпізнавання паралельно підключений до першого входу блока...
Пристрій для розпізнавання симетричності зображень об’єктів
Номер патенту: 52678
Опубліковано: 15.01.2003
Автори: Мартинюк Тетяна Борисівна, Кожем'яко Андрій Вікторович, Буда Антоніна Героніївна, Андрущенко Володимир Іванович, Буда Сергій Анатолійович
МПК: G06K 9/58, G06K 9/52, G06K 11/00, G06K 9/00
Мітки: розпізнавання, об'єктів, симетричності, пристрій, зображень
Формула / Реферат:
Пристрій для розпізнавання симетричності зображень об'єктів, що містить перший блок зміщення зображення, оптичний вхід якого є інформаційним входом пристрою, блок повороту зображення, другий блок зміщення зображення, перший та другий мультиплікатори світлового потоку, послідовно розміщені на одній оптичній осі з першим та другим блоками зміщення зображення, перший та другий формувачі сигналів статичних моментів, що містять блок заміни...
Спосіб розпізнавання державних номерних знаків автотранспортних засобів
Номер патенту: 27856
Опубліковано: 12.11.2007
Автори: Кухтаров Сергій Андрійович, Окончук Володимир Іванович, Люлевич Станіслав Валерійович, Щучик Едуард Степанович, Михайловський Сергій Васильович
МПК: G08G 1/01, G08G 1/017
Мітки: державних, засобів, знаків, спосіб, номерних, автотранспортних, розпізнавання
Формула / Реферат:
1. Спосіб розпізнавання державних номерних знаків автотранспортних засобів, що включає зчитування державних номерних знаків автотранспортних засобів з контрольованої зони, пошук зчитаних державних номерних знаків автотранспортних засобів у базах даних, формування сигналу у разі збіжності державного номерного знака з записом у будь-якій з баз даних, формування бази даних зчитаних державних номерних знаків автотранспортних засобів, формування...
Попередній патент: Спосіб гемостазу при травмі органів черевної порожнини
Наступний патент: Спосіб одержання губчастого титану
Випадковий патент: Опорна балка під конвективний пакет котельного агрегату