Пристрій для розпізнавання симетричності зображень об’єктів
Номер патенту: 52678
Опубліковано: 15.01.2003
Автори: Кожем'яко Андрій Вікторович, Мартинюк Тетяна Борисівна, Андрущенко Володимир Іванович, Буда Антоніна Героніївна, Буда Сергій Анатолійович
Формула / Реферат
Пристрій для розпізнавання симетричності зображень об'єктів, що містить перший блок зміщення зображення, оптичний вхід якого є інформаційним входом пристрою, блок повороту зображення, другий блок зміщення зображення, перший та другий мультиплікатори світлового потоку, послідовно розміщені на одній оптичній осі з першим та другим блоками зміщення зображення, перший та другий формувачі сигналів статичних моментів, що містять блок заміни комплектів тіньових бінарних масок , першу та другу n-і пари оптичних перетворювачів, першу та другу n-і пари фотоприймачів, перший та другий вагові суматори, блок віднімання і блок узгодження , блок керування, причому перші n-і оптичні виходи блока заміни комплектів тіньових бінарних масок сполучені з входами відповідно першої n-ї пари оптичних перетворювачів, виходи оптичних перетворювачів першої та другої n-х пар з'єднані з входами відповідних фотоприймачів, виходи перших та других фотоприймачів усіх пар підключені до відповідних входів відповідно першого та другого вагових суматорів, виходи яких з'єднані зі входами підсумовування та віднімання блока віднімання, вихід якого підключений до входу блока узгодження, виходи блоків узгодження першого та другого формувачів сигналів статичних моментів з'єднані з першою та другою групами керуючих входів блока керування, перша та друга групи виходів якого підключені до одноіменних груп керуючих входів першого блока зміщення зображення, третя - п'ята групи виходів підключені відповідно до першої та другої груп керуючих входів другого блока зміщення зображення та керуючих входів блока повороту зображення, перший та другий виходи світлоподільника оптично зв'язані зі входами першого та другого мультиплікаторів світлового потоку, перші n-і виходи яких оптично зв'язані з одноіменними інформаційними входами блоків заміни комплектів тіньових бінарних масок першого та другого формувачів сигналів статичних моментів, який відрізняється тим, що в блок заміни комплектів тіньових бінарних масок кожного формувача сигналів статичних моментів введені додаткові комплекти тіньових бінарних масок, керуючі виходи та керуючі входи блоків заміни комплектів тіньових бінарних масок першого та другого формувачів сигналів статичних моментів підключені відповідно до першого та другого керуючих входів та першої і другої груп керуючих виходів блока керування, вхід запуску, встановлювальні входи та виходи якого є одноіменними входами та виходами пристрою, а блок керування включає в себе пристрій мікропрограмного керування, пристрій фіксації зміщень вздовж осей Χ та Υ і пристрій фіксації класів та підкласів симетричних об'єктів, причому пристрій мікропрограмного керування (ПМПК) блока керування містить програмований постійний пристрій запам'ятовування (ППЗ), регістр, п'ять дешифраторів, генератор тактових імпульсів, два RS-тригери, логічний елемент 2I-АБО-НІ, елемент НІ, три блоки елементів 2I-НІ, елемент І, причому вхід запуску пристрою з'єднаний з S-входом першого тригера і входом обнулення регістру, прямий вихід першого тригера з'єднаний з першим входом елемента І, другий вхід якого підключений до виходу генератора тактових імпульсів, а вихід - до входу тактових сигналів регістру, інверсний вихід першого тригера з'єднаний з четвертим виходом блока керування, інформаційні входи ППЗ з першого по п'ятий з'єднані з відповідними виходами третього блока елементів 2І-НІ, а інформаційні виходи з першого по двадцять шостий - з відповідними інформаційними входами регістру, у якого інформаційні виходи з першого по дванадцятий з'єднані з відповідними інформаційними входами дешифраторів з першого по четвертий, інформаційні виходи з тринадцятого по шістнадцятий з'єднані з відповідними інформаційними входами п'ятого дешифратора, а інформаційні виходи з сімнадцятого по двадцять шостий з'єднані з першими входами першого та другого блоків елементів 2I-НІ, другі входи першого блока елементів 2I-НІ підключені до виходу елемента 2I-АБО-НІ, що через елемент НІ з'єднаний з другими входами другого блока елементів 2І-НІ, а виходи першого та другого блоків елементів 2І-НІ з'єднані з відповідними входами третього блока елементів 2І-НІ, два керуючих входи п'ятьох дешифраторів підключені до шини нульового потенціалу пристрою, а виходи п'ятого дешифратора з першого по десятий з'єднані з другою групою входів елемента 2І-АБО-НІ, перша група входів якого з першого по шостий вхід з'єднана відповідно з першим та другим входами та входами першої та другої групи керуючих входів блока керування, сьомий та восьмий входи - з першим та другим керуючими входами ПМПК, дев'ятий вхід - з інверсним виходом другого тригера, а десятий вхід - з третім виходом блока керування, виходи дешифраторів з першого по четвертий є відповідними виходами ПМПК з першого по двадцять третій, причому шостий вихід четвертого дешифратора з'єднаний з R-входом першого тригера, а перший вихід першого дешифратора і другий вихід четвертого дешифратора підключені відповідно до R-входу та S-входу другого тригера, пристрій фіксації зміщень вздовж осей Χ та Υ (ΠΦ3) блока керування містить шість лічильників, дешифратор, два оперативних пристрої запам'ятовування (ОПЗ), два елементи НІ, дві групи по К елементів АБО, елемент АБО, причому інформаційні входи першого та другого лічильників з'єднані відповідно з k-розрядним шостим та l-розрядним сьомим входами блока керування, інформаційні входи третього та п'ятого лічильників підключені до n-розрядного четвертого входу блока керування, а інформаційні входи четвертого та шостого лічильників - до m-розрядного п'ятого входу блока керування, причому k=log2К, l=log2L, n=log2N, m=log2M, де К - число комплектів масок, L=90°/Δφ, Δφ - крок повороту, ΝxΜ - розмірність інформаційного поля, причому інформаційні k-розрядні виходи першого лічильника підключені до першої та другої груп керуючих виходів блока керування, інформаційні l-розрядні виходи другого лічильника - до п'ятої групи виходів блока керування, інформаційні n-розрядні виходи третього та п'ятого лічильників - до першої та третьої групи виходів блока керування, інформаційні m-розрядні виходи четвертого та шостого лічильників - до другої та четвертої груп виходів блока керування, інверсні виходи першого і другого лічильників через перший та другий елементи НІ з'єднані з першим та другим керуючими входами ПМПК блока керування, виходи К кристалів першого і другого ОПЗ об'єднані в (Κ x n) та (Κ x m)-розрядні шини і підключені відповідно до першого та другого інформаційних виходів ПФЗ блока керування, входи обнулення лічильників з першого по четвертий з'єднані з першим входом ПФЗ, входи обнулення п'ятого та шостого лічильників підключені до виходів елемента АБО, входи якого з'єднані з першим та сімнадцятим входами ПФЗ, входи ![]() першого та другого лічильників з'єднані відповідно з другим і десятим входами ПФЗ, входи
першого та другого лічильників з'єднані відповідно з другим і десятим входами ПФЗ, входи ![]() третього та четвертого лічильників підключені до третього входу ПФЗ, входи
третього та четвертого лічильників підключені до третього входу ПФЗ, входи ![]() п'ятого та шостого лічильників - до четвертого входу ПФЗ, входи підсумовування першого та другого лічильників підключені до шини нульового потенціалу пристрою, входи підсумовування лічильників з третього по шостий з'єднані відповідно з п'ятим, сьомим, одинадцятим та тринадцятим входами ПФЗ, входи віднімання лічильників з першого по шостий з'єднані відповідно з дев'ятим, шістнадцятим, шостим, восьмим, дванадцятим та чотирнадцятим входами ПФЗ, інформаційні виходи першого лічильника з'єднані з інформаційними входами дешифратора, керуючі входи якого підключені до шини нульового потенціалу, а інверсні виходи з першого по К-й з'єднані відповідно з входами
п'ятого та шостого лічильників - до четвертого входу ПФЗ, входи підсумовування першого та другого лічильників підключені до шини нульового потенціалу пристрою, входи підсумовування лічильників з третього по шостий з'єднані відповідно з п'ятим, сьомим, одинадцятим та тринадцятим входами ПФЗ, входи віднімання лічильників з першого по шостий з'єднані відповідно з дев'ятим, шістнадцятим, шостим, восьмим, дванадцятим та чотирнадцятим входами ПФЗ, інформаційні виходи першого лічильника з'єднані з інформаційними входами дешифратора, керуючі входи якого підключені до шини нульового потенціалу, а інверсні виходи з першого по К-й з'єднані відповідно з входами ![]() К кристалів першого і другого ОПЗ, адресні входи яких підключені до інформаційних виходів другого лічильника, а входи
К кристалів першого і другого ОПЗ, адресні входи яких підключені до інформаційних виходів другого лічильника, а входи ![]() - до виходів відповідних першої та другої груп елементів АБО, інверсний вхід яких з'єднаний з п'ятнадцятим входом ПФЗ, а прямий вхід - з вісімнадцатим входом ПФЗ , інформаційні входи першого ОПЗ з'єднані з інформаційними виходами п'ятого лічильника, а інформаційні входи другого ОПЗ - з інформаційними виходами шостого лічильника, входи ПФЗ з першого по вісімнадцатий з'єднані з відповідними з першого по вісімнадцятий виходами ПМПК, причому пристрій фіксації класів та підкласів симетричних об'єктів (ПФКІП) блока керування містить дві групи по К схем порівняння, два лічильники, два регістри, два дешифратори, дві схеми перевірки на парність, чотири тригери, дванадцять елементів І, два елементи І-НІ, два елементи АБО-НІ, елемент НЕРІВНОЗНАЧНІСТЬ, два елементи НІ, причому входи першої групи схем порівняння першої і другої групи підключені відповідно до виходів першої і другої групи ПФЗ, а входи другої групи - до шини нульового потенціалу пристрою, виходи схем порівняння першої групи з'єднані з входами першого елемента І, вихід якого підключений до першого входу другого елемента І, другий вхід якого з'єднаний з прямим виходом першого тригера, а вихід - з D-входом першого тригера і через перший елемент НІ з входом Е0 першої схеми перевірки на парність, крім того вихід другого елемента І з'єднаний з входами DSR та S0 першого регістру, входом ЕЕ першої схеми перевірки на парність і входом
- до виходів відповідних першої та другої груп елементів АБО, інверсний вхід яких з'єднаний з п'ятнадцятим входом ПФЗ, а прямий вхід - з вісімнадцатим входом ПФЗ , інформаційні входи першого ОПЗ з'єднані з інформаційними виходами п'ятого лічильника, а інформаційні входи другого ОПЗ - з інформаційними виходами шостого лічильника, входи ПФЗ з першого по вісімнадцатий з'єднані з відповідними з першого по вісімнадцятий виходами ПМПК, причому пристрій фіксації класів та підкласів симетричних об'єктів (ПФКІП) блока керування містить дві групи по К схем порівняння, два лічильники, два регістри, два дешифратори, дві схеми перевірки на парність, чотири тригери, дванадцять елементів І, два елементи І-НІ, два елементи АБО-НІ, елемент НЕРІВНОЗНАЧНІСТЬ, два елементи НІ, причому входи першої групи схем порівняння першої і другої групи підключені відповідно до виходів першої і другої групи ПФЗ, а входи другої групи - до шини нульового потенціалу пристрою, виходи схем порівняння першої групи з'єднані з входами першого елемента І, вихід якого підключений до першого входу другого елемента І, другий вхід якого з'єднаний з прямим виходом першого тригера, а вихід - з D-входом першого тригера і через перший елемент НІ з входом Е0 першої схеми перевірки на парність, крім того вихід другого елемента І з'єднаний з входами DSR та S0 першого регістру, входом ЕЕ першої схеми перевірки на парність і входом ![]() та входом віднімання першого лічильника, виходи схем порівняння другої групи з'єднані з входами третього елемента І, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з прямим виходом другого тригера, а вихід - з D-входом другого тригера та через другий елемент НІ з входом Е0 другої схеми перевірки на парність, крім того вихід четвертого елемента І з'єднаний з входами DSR і SO другого регістру, входом ЕЕ другої схеми перевірки на парність і входом
та входом віднімання першого лічильника, виходи схем порівняння другої групи з'єднані з входами третього елемента І, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з прямим виходом другого тригера, а вихід - з D-входом другого тригера та через другий елемент НІ з входом Е0 другої схеми перевірки на парність, крім того вихід четвертого елемента І з'єднаний з входами DSR і SO другого регістру, входом ЕЕ другої схеми перевірки на парність і входом ![]() та входом віднімання другого лічильника, тактовий вхід, встановлювальний вхід в “0” та S-вхід першого та другого тригерів з'єднані відповідно з третім, першим і другим входами ПФКІП, причому прямі виходи першого та другого тригерів з'єднані з входами елемента НЕРІВНОЗНАЧНІСТЬ, першого елемента АБО-НІ і п'ятого елемента І, інверсний вихід першого тригера з'єднаний з другим входом дванадцятого елемента І, а інверсний вихід другого тригера - з другим входом десятого елемента І, входи DSR та S0 першого та другого регістрів підключені до шини нульового потенціалу пристрою, тактовий вхід з'єднаний з четвертим входом ПФКІП, а встановлювальний вхід в “0” - з відповідним виходом старшого розряду регістру, причому інформаційні виходи першого та другого регістрів підключені до інформаційних входів першої та другої схем перевірки на парність відповідно, виходи
та входом віднімання другого лічильника, тактовий вхід, встановлювальний вхід в “0” та S-вхід першого та другого тригерів з'єднані відповідно з третім, першим і другим входами ПФКІП, причому прямі виходи першого та другого тригерів з'єднані з входами елемента НЕРІВНОЗНАЧНІСТЬ, першого елемента АБО-НІ і п'ятого елемента І, інверсний вихід першого тригера з'єднаний з другим входом дванадцятого елемента І, а інверсний вихід другого тригера - з другим входом десятого елемента І, входи DSR та S0 першого та другого регістрів підключені до шини нульового потенціалу пристрою, тактовий вхід з'єднаний з четвертим входом ПФКІП, а встановлювальний вхід в “0” - з відповідним виходом старшого розряду регістру, причому інформаційні виходи першого та другого регістрів підключені до інформаційних входів першої та другої схем перевірки на парність відповідно, виходи ![]() парності яких з'єднані з другим і третім входами сьомого елемента І, а виходи
парності яких з'єднані з другим і третім входами сьомого елемента І, а виходи ![]() непарності - з другим та третім входами восьмого елемента І, встановлювальний вхід в “0” і вхід підсумовування першого та другого лічильників підключені відповідно до першого та четвертого входів ПФКІП, а інформаційні виходи з'єднані з інформаційними входами першого та другого дешифраторів відповідно, входи Е та Е1 яких підключені до шини нульового потенціалу пристрою, інверсні виходи першого та другого розрядів першого дешифратора з'єднані з входами першого елемента І-НІ, інверсні виходи першого і другого розрядів другого дешифратора - з входами другого елемента І-НІ, інверсні виходи (L-1)-x розрядів першого та другого дешифраторів підключені до другого та третього входів другого елемента АБО-НІ, а інверсні виходи (L-2)-x розрядів - до інверсних входів одинадцятого та дев'ятого елементів І відповідно, встановлювальний вхід в “0” та тактовий вхід третього і четвертого тригерів підключені відповідно до першого та п'ятого входів ПФКІП, a D-входи - до виходів елемента НЕРІВНОЗНАЧНІСТЬ та п'ятого елемента І відповідно, прямий вихід четвертого тригера підключений до першого виходу блока керування, до перших входів шостого, сьомого і восьмого елементів та до інверсного входу другого елемента АБО-НІ, вихід якого з'єднаний з п'ятим виходом блока керування, другий і третій входи шостого елемента І підключені до виходів обох елементів І-НІ, виходи шостого, сьомого і восьмого елементів І підключені відповідно до шостого, сьомого і восьмого виходів блока керування, прямий вихід третього тригера з'єднаний з другим виходом блока керування і з першими входами елементів І з дев'ятого по дванадцятий, вихід першого елемента АБО-НІ підключений до третього виходу блока керування, а виходи дев'ятого та одинадцятого елементів І - до десятого та дев'ятого виходів блока керування відповідно, а також до інверсних входів десятого та дванадцятого елементів І, виходи яких з'єднані з дванадцятим та одинадцятим виходами блока керування, крім того п'ять входів ПФКІП з'єднані з першим, дев'ятнадцятим, двадцять першим, двадцять другим та двадцять третім виходами ПМПК.
непарності - з другим та третім входами восьмого елемента І, встановлювальний вхід в “0” і вхід підсумовування першого та другого лічильників підключені відповідно до першого та четвертого входів ПФКІП, а інформаційні виходи з'єднані з інформаційними входами першого та другого дешифраторів відповідно, входи Е та Е1 яких підключені до шини нульового потенціалу пристрою, інверсні виходи першого та другого розрядів першого дешифратора з'єднані з входами першого елемента І-НІ, інверсні виходи першого і другого розрядів другого дешифратора - з входами другого елемента І-НІ, інверсні виходи (L-1)-x розрядів першого та другого дешифраторів підключені до другого та третього входів другого елемента АБО-НІ, а інверсні виходи (L-2)-x розрядів - до інверсних входів одинадцятого та дев'ятого елементів І відповідно, встановлювальний вхід в “0” та тактовий вхід третього і четвертого тригерів підключені відповідно до першого та п'ятого входів ПФКІП, a D-входи - до виходів елемента НЕРІВНОЗНАЧНІСТЬ та п'ятого елемента І відповідно, прямий вихід четвертого тригера підключений до першого виходу блока керування, до перших входів шостого, сьомого і восьмого елементів та до інверсного входу другого елемента АБО-НІ, вихід якого з'єднаний з п'ятим виходом блока керування, другий і третій входи шостого елемента І підключені до виходів обох елементів І-НІ, виходи шостого, сьомого і восьмого елементів І підключені відповідно до шостого, сьомого і восьмого виходів блока керування, прямий вихід третього тригера з'єднаний з другим виходом блока керування і з першими входами елементів І з дев'ятого по дванадцятий, вихід першого елемента АБО-НІ підключений до третього виходу блока керування, а виходи дев'ятого та одинадцятого елементів І - до десятого та дев'ятого виходів блока керування відповідно, а також до інверсних входів десятого та дванадцятого елементів І, виходи яких з'єднані з дванадцятим та одинадцятим виходами блока керування, крім того п'ять входів ПФКІП з'єднані з першим, дев'ятнадцятим, двадцять першим, двадцять другим та двадцять третім виходами ПМПК.
Текст
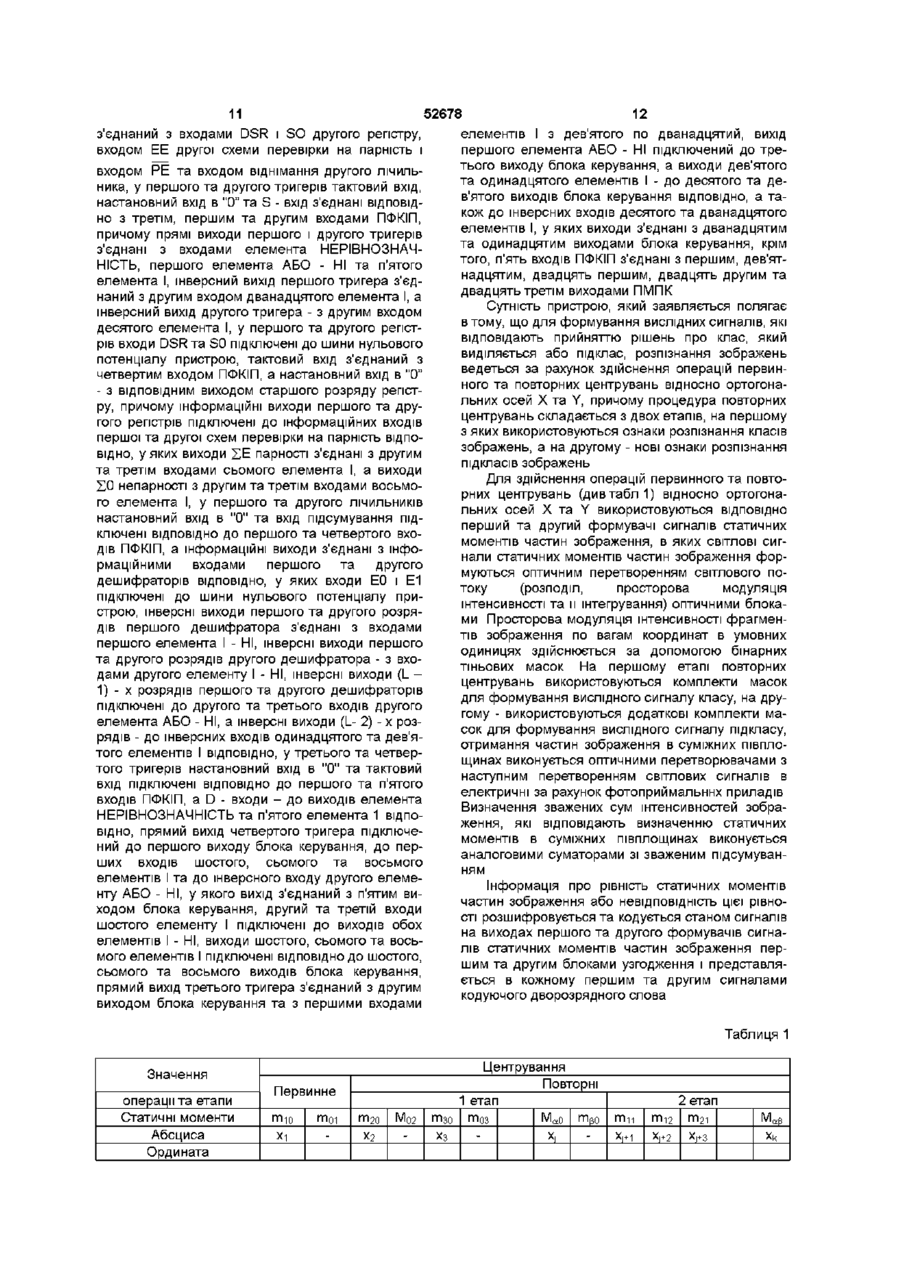
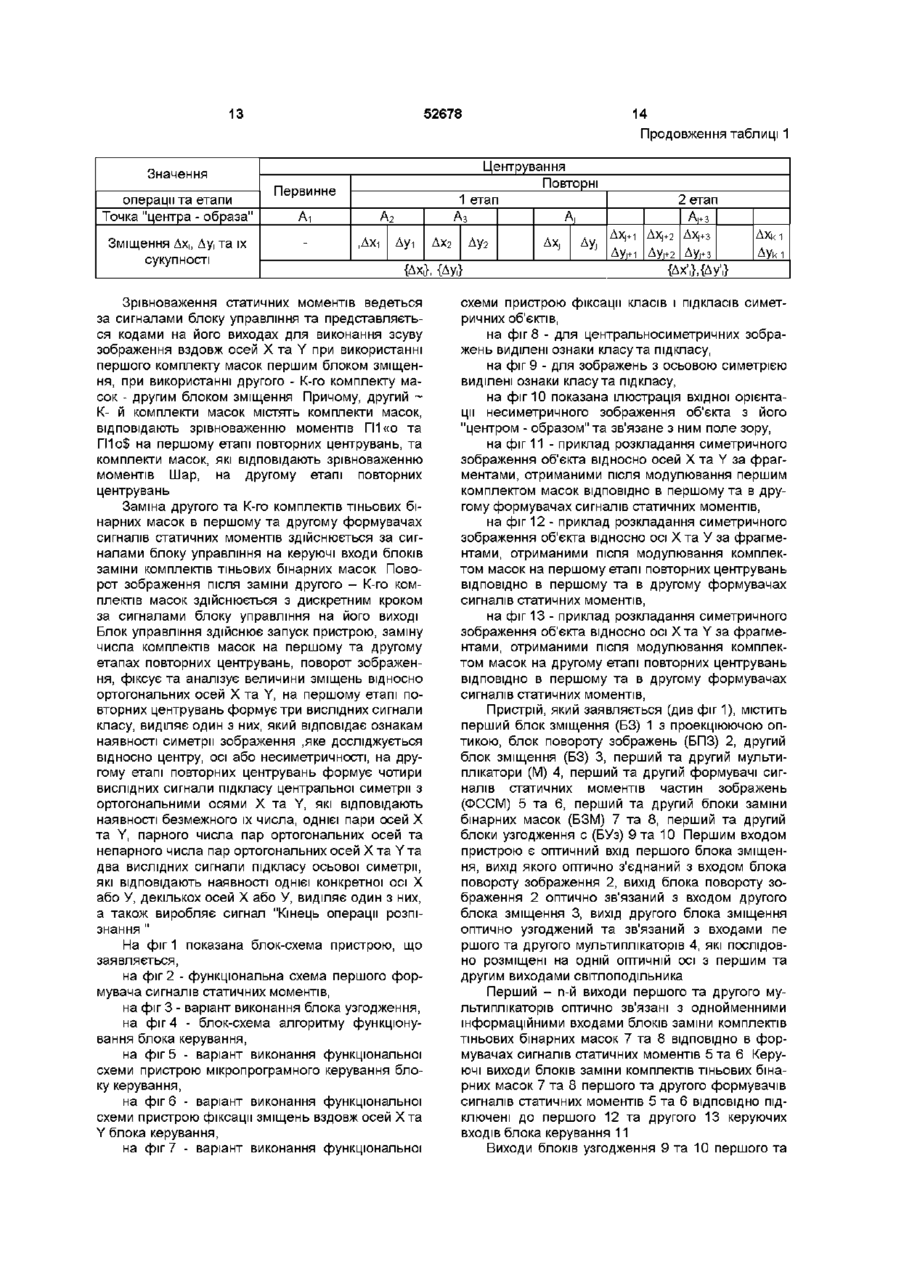
Пристрій для розпізнавання симетричності зображень об'єктів, що містить перший блок зміщення зображення, оптичний вхід якого є інформаційним входом пристрою, блок повороту зображення, другий блок зміщення зображення, перший та другий мультиплікатори світлового потоку, послідовно розміщені на одній оптичній осі з першим та другим блоками зміщення зображення, перший та другий формувачі сигналів статичних моментів, що містять блок заміни комплектів тіньових бінарних масок , першу та другу n-і пари оптичних перетворювачів, першу та другу n-і пари фотоприймачів, перший та другий вагові суматори, блок віднімання і блок узгодження , блок керування, причому перші n-і оптичні виходи блока заміни комплектів тіньових бінарних масок сполучені з входами ВІДПОВІДНО першої n-і пари оптичних перетворювачів, виходи оптичних перетворювачів першої та другої n-х пар з'єднані з входами ВІДПОВІДНИХ фотоприймачів, виходи перших та других фотоприймачів усіх пар підключені до ВІДПОВІДНИХ ВХОДІВ ВІДПОВІДНО першого та другого вагових су маторів, виходи яких з'єднані зі входами підсумовування та віднімання блока віднімання, вихід якого підключений до входу блока узгодження, виходи блоків узгодження першого та другого формувачів сигналів статичних моментів з'єднані з першою та другою групами керуючих входів блока керування, перша та друга групи виходів якого підключені до одноіменних груп керуючих входів першого блока зміщення зображення, третя - п'ята групи виходів підключені ВІДПОВІДНО до першої та другої груп керуючих входів другого блока зміщення зображення та керуючих входів блока повороту зображення, перший та другий виходи світлоподільника оптично звязані зі входами першого та другого мультиплікаторів світлового потоку, перші n-і виходи яких оптично зв'язані з одноіменними інформаційними входами блоків заміни комплектів тіньових бінарних масок першого та другого формувачів сигналів статичних моментів, який відрізняється тим, що в блок заміни комплектів тіньових бінарних масок кожного формувача сигналів статичних моментів введені додаткові комплекти тіньових бінарних масок, керуючі виходи та керуючі входи блоків заміни комплектів тіньових бінарних масок першого та другого формувачів сигналів статичних моментів підключені ВІДПОВІДНО до першого та другого керуючих входів та першої і другої груп керуючих виходів блока керування, вхід запуску, встановлювальні входи та виходи якого є одноіменними входами та виходами пристрою, а блок керування включає в себе пристрій мікропрограмного керування, пристрій фіксації зміщень вздовж осей X та Y і пристрій фіксації класів та підкласів симетричних об'єктів, причому пристрій мікропрограмного керування (ПМПК) блока керування містить програмований постійний пристрій запам'ятовування (ППЗ), регістр, п'ять дешифраторів, генератор тактових імпульсів, два RS-тригери, логічний елемент 2І-АБО-НІ, елемент НІ, три блоки елементів 2І-НІ, елемент І, причому вхід запуску пристрою з'єднаний з S-входом першого тригера і входом обнуления регістру, прямий вихід першого тригера з'єднаний з першим входом елемента І, другий вхід якого підключений до виходу генератора тактових імпульсів, а вихід - до входу тактових сигналів регістру, інверсний вихід першого тригера з'єднаний з четвертим виходом блока керування, інформаційні входи ППЗ з першого по п'ятий з'єднані з ВІДПОВІДНИМИ виходами третього блока елементів 2І-НІ, а інформаційні виходи з першого по двадцять шостий - з ВІДПОВІДНИМИ інформаційними входами регістру, у якого інформаційні виходи з першого по дванадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами дешифраторів з першого по четвертий, інформаційні виходи з тринадцятого по шістнадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами п'ятого дешифратора, а інформаційні виходи з сімнадцятого по двадцять шостий з'єднані з першими входами першого та другого блоків елементів 2І-НІ, другі входи першого блока елементів 2І О 00 (О ю НІ підключені до виходу елемента 21-АБО-НІ, що через елемент НІ з'єднаний з другими входами другого блока елементів 21-НІ, а виходи першого та другого блоків елементів 21-НІ з'єднані з ВІДПОВІДНИМИ входами третього блока елементів 21-НІ, два керуючих входи п'ятьох дешифраторів підключені до шини нульового потенціалу пристрою, а виходи п'ятого дешифратора з першого по десятий з'єднані з другою групою входів елемента 21АБО-НІ, перша група входів якого з першого по шостий вхід з'єднана ВІДПОВІДНО З першим та другим входами та входами першої та другої групи керуючих входів блока керування, сьомий та восьмий входи - з першим та другим керуючими входами ПМПК, дев'ятий вхід - з інверсним виходом другого тригера, а десятий вхід - з третім виходом блока керування, виходи дешифраторів з першого по четвертий є ВІДПОВІДНИМИ виходами ПМПК з першого по двадцять третій, причому шостий вихід четвертого дешифратора з'єднаний з R-входом першого тригера, а перший вихід першого дешифратора і другий вихід четвертого дешифратора підключені ВІДПОВІДНО до R-входу та S-входу другого тригера, пристрій фіксації зміщень вздовж осей X та Y (ПФЗ) блока керування містить шість ЛІЧИЛЬНИКІВ, дешифратор, два оперативних пристрої запам'ятовування (ОПЗ), два елементи НІ, дві групи по К елементів АБО, елемент АБО, причому інформаційні входи першого та другого ЛІЧИЛЬНИКІВ з'єднані ВІДПОВІДНО з k-розрядним шостим та І-розрядним сьомим входами блока керування, інформаційні входи третього та п'ятого ЛІЧИЛЬНИКІВ підключені до n-розрядного четвертого входу блока керування, а інформаційні входи четвертого та шостого ЛІЧИЛЬНИКІВ - до m-розрядного П'ЯТОГО входу блока керування, причому к^ІодгК, І=Іод2І_, п=Іод2ІЧ т=Іод2М, де К - число комплектів масок, І_=9О7Дср, Дер - крок повороту, NxM - розмірність інформаційного поля, причому інформаційні крозрядні виходи першого лічильника підключені до першої та другої груп керуючих виходів блока керування, інформаційні І-розрядні виходи другого лічильника - до п'ятої групи виходів блока керування, інформаційні n-розрядні виходи третього та п'ятого ЛІЧИЛЬНИКІВ - до першої та третьої групи виходів блока керування, інформаційні т-розрядні виходи четвертого та шостого ЛІЧИЛЬНИКІВ - до другої та четвертої груп виходів блока керування, інверсні виходи першого і другого ЛІЧИЛЬНИКІВ через перший та другий елементи НІ з'єднані з першим та другим керуючими входами ПМПК блока керування, виходи К кристалів першого і другого ОПЗ об'єднані в (К х п) та (К х т)-розрядні шини і підключені ВІДПОВІДНО до першого та другого інформаційних виходів ПФЗ блока керування, входи обнуления ЛІЧИЛЬНИКІВ з першого по четвертий з'єднані з першим входом ПФЗ, входи обнуления п'ятого та шостого ЛІЧИЛЬНИКІВ підключені до виходів елемента АБО, входи якого з'єднані з першим та сімнадцятим входами ПФЗ, входи РЕ першо го та другого ЛІЧИЛЬНИКІВ з'єднані ВІДПОВІДНО ЗІ дру гим і десятим входами ПФЗ, входи РЕ третього та четвертого ЛІЧИЛЬНИКІВ підключені до третього входу ПФЗ, входи РЕ п'ятого та шостого лічиль 52678 ників - до четвертого входу ПФЗ, входи підсумовування першого та другого ЛІЧИЛЬНИКІВ підключені до шини нульового потенціалу пристрою, входи підсумовування ЛІЧИЛЬНИКІВ З третього по шостий з'єднані ВІДПОВІДНО з п'ятим, сьомим, одинадцятим та тринадцятим входами ПФЗ, входи віднімання ЛІЧИЛЬНИКІВ з першого по шостий з'єднані ВІДПОВІДНО з дев'ятим, шістнадцятим, шостим, восьмим, дванадцятим та чотирнадцятим входами ПФЗ, інформаційні виходи першого лічильника з'єднані з інформаційними входами дешифратора, керуючі входи якого підключені до шини нульового потенціалу, а інверсні виходи з першого по К-й з'єднані ВІДПОВІДНО з входами CS К кристалів першого і другого ОПЗ, адресні входи яких підключені до інформаційних виходів другого лічильника, а входи WE . до виходів ВІДПОВІДНИХ першої та другої груп елементів АБО, інверсний вхід яких з'єднаний з п'ятнадцятим входом ПФЗ, а прямий вхід - з вісімнадцятим входом ПФЗ , інформаційні входи першого ОПЗ з'єднані з інформаційними виходами п'ятого лічильника, а інформаційні входи другого ОПЗ - з інформаційними виходами шостого лічильника, входи ПФЗ з першого по вісімнадцатий з'єднані з ВІДПОВІДНИМИ з першого по вісімнадцятий виходами ПМПК, причому пристрій фіксації класів та підкласів симетричних об'єктів (ПФКІП) блока керування містить дві групи по К схем порівняння, два лічильники, два регістри, два дешифратори, дві схеми перевірки на парність, чотири тригери, дванадцять елементів І, два елементи 1— 1 два - 1, І елементи АБО-НІ, елемент НЕРІВНОЗНАЧНІСТЬ, два елементи НІ, причому входи першої групи схем порівняння першої і другої групи підключені ВІДПОВІДНО до виходів першої і другої групи ПФЗ, а входи другої групи - до шини нульового потенціалу пристрою, виходи схем порівняння першої групи з'єднані з входами першого елемента І, вихід якого підключений до першого входу другого елемента І, другий вхід якого з'єднаний з прямим виходом першого тригера, а вихід - з D-входом першого тригера і через перший елемент НІ з входом ЕО першої схеми перевірки напарність, крім того вихід другого елемента І з'єднаний з входами DSRTa SO першого регістру, входом ЕЕ першої схеми перевірки на парність і входом РЕ та входом віднімання першого лічильника, виходи схем порівняння другої групи з'єднані з входами третього елемента І, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з прямим виходом другого тригера, а вихід - з D-входом другого тригера та через другий елемент НІ з входом ЕО другої схеми перевірки на парність, крім того вихід четвертого елемента І з'єднаний з входами DSR і SO другого регістру, входом ЕЕ другої схеми перевірки на парність і входом РЕ та входом віднімання другого лічильника, тактовий вхід, встановлювальний вхід в "0" та S-вхід першого та другогого тригерів з'єднані ВІДПОВІДНО з третім, першим і другим входами ПФКІП, причому прямі виходи першого та другого тригерів з'єднані з входами елемента НЕРІВНОЗНАЧНІСТЬ, першого елемента АБО-НІ і п'ятого 52678 елемента АБО-НІ, а інверсні виходи (І_-2)-х розряелемента І, інверсний вихід першого тригера з єддів - до інверсних входів одинадцятого та дев'ятонаний з другим входом дванадцятого елемента І, а го елементів І ВІДПОВІДНО, встановлювальний вхід інверсний вихід другого тригера - з другим входом в "0" та тактовий вхід третього і четвертого тригедесятого елемента І, входи DSR та SO першого та рів підключені ВІДПОВІДНО до першого та п'ятого другого регістрів підключені до шини нульового входів ПФКІП, а D-входи - до виходів елемента потенціалу пристрою, тактовий вхід з'єднаний з НЕРІВНОЗНАЧНІСТЬ та п'ятого елемента І ВІДПОчетвертим входом ПФКІП, а встановлювальний ВІДНО, прямий вихід четвертого тригера підключевхід в "0" - з ВІДПОВІДНИМ виходом старшого розряний до першого виходу блока керування, до перду регістру, причому Інформаційні виходи першого ших входів шостого, сьомого і восьмого елементів та другого регістрів підключені до інформаційних та до інверсного входу другого елемента АБО-НІ, входів першої та другої схем перевірки на парність вихід якого з'єднаний з п'ятим виходом блока кеТЕ рування, другий і третій входи шостого елемента І ВІДПОВІДНО, виходи /- непарності - з другим та третім вхоВІДПОВІДНО ДО ШОСТОГО, СЬОМОГО І ВОСЬМОГО ВИХОДІВ дами восьмого елемента І, встановлювальний вхід блока керування, прямий вихід третього тригера в "0" і вхід підсумовування першого та другого ЛІз'єднаний з другим виходом блока керування і з ЧИЛЬНИКІВ підключені ВІДПОВІДНО до першого та першими входами елементів І з дев'ятого по двачетвертого входів ПФКІП, а інформаційні виходи надцятий, вихід першого елемента АБО-НІ підз'єднані з інформаційними входами першого та ключений до третього виходу блока керування, а другого дешифраторів ВІДПОВІДНО, ВХОДИ Е та Е1 виходи дев'ятого та одинадцятого елементів І - до яких підключені до шини нульового потенціалу десятого та дев'ятого виходів блока керування пристрою, інверсні виходи першого та другого ВІДПОВІДНО, а також до інверсних входів десятого розрядів першого дешифратора з'єднані з входата дванадцятого елементів І, виходи яких з'єднані ми першого елемента 1І I, інверсні виходи першо-— з дванадцятим та одинадцятим виходами блока го і другого розрядів другого дешифратора - з вхокерування, крім того п'ять входів ПФКІП з'єднані з дами другого елемента 1І I, інверсні виходи (І_-1)-х -— першим, дев'ятнадцятим, двадцять першим, дварозрядів першого та другого дешифраторів піддцять другим та двадцять третім виходами ПМПК ключені до другого та третього входів другого Винахід відноситься до області автоматики та обчислювальної техніки і може бути використаний для обробки зображень в системах керування та системах технічного зору промислових роботів Відомий пристрій для центрування зображень, що входить в рецепторний пристрій для розпізнання зображень (Г П Шибанов Распознавания в системах автоконтроля М, Машиностроение, 1973, с 98-103),що містить фотоприймальну сітчатку та два ідентичних блоки визначення статичних моментів частин зображення, входи яких з'єднані з виходами сітчатки, кожний з блоків містить матрицю ДІЛЬНИКІВ, вхід якої є входом блока, виходи з'єднані з входами першого та другого суматорів, до виходів яких підключені входи блока порівняння, вихід якого з'єднаний з входом блока керування, до якого підключена сітчатка Недоліками цього пристрою є складність, зумовлена виділенням контуру зображень та виконанням обчислень, обмежені функціональні можливості, оскільки пристрій не дозволяє розпізнати зображення за ознаками симетричності відносно осі та центру, низька швидкодія, зв'язана з витратами часу для опитування осередків сітчатки, низька точність Відомий пристій для центрування зображень (а с 1381551 МКИ G 06 К 11/00, БИ N 10, 1988), що містить блок проекціювання, блоки формування сигналів статичних моментів , блок керування, СВІТЛОПОДІЛНИЙ блок, вхід якого зв'язаний з виходом блока проекціювання, а оптичні виходи зв'язані з входами блоків формування сигналів стати чних моментів зображення, кожний з яких містить диференціальний підсилювач та оптично зв'язані оптичний фільтр з ЛІНІЙНИМ коефіцієнтом пропускання, оптичний перетворювач, виконаний у вигляді 2-х пірамідальних фокопов, та фотоприймачі, виходи яких підключені до входів диференціального підсилювача, виходи диференціальних підсилювачів блоків формування сигналів статичних моментів зображень підключені до входів сигналів узгодження блока керування, виходи яких з'єднані з керуючими входами блока проекціювання Однак для цього пристрою характерні низька точність, зв'язана з застосуванням фільтру з коефіцієнтом пропускання, що ЛІНІЙНО залежить від розміру апертури та обмежені функціональні можливості, оскільки пристрій не дозволяє селектувати зображення за ознаками симетричності Найбільш близьким до запропонованого є пристрій для здійснення засобу розпізнання симетричності зображень об'єктів (патент України N 3741, N 6 - 1, 1994), що містить перший блок зміщення зображень, оптичний вхід якого є інформаційним входом пристрою, послідовно розміщені на одній оптичній осі блок повороту зображення, другий блок зміщення зображення, перший та другий мультиплікатори світлового потоку, перший та другий формувачі сигналів статичних моментів, блок керування, а кожний із формувачів сигналів включає блок заміни комплектів тіньових бінарних масок, першу та другу n-і пари оптичних перетворювачів, першу та другу n-і пари фотоприймачів, 52678 8 блок узгодження, перший та другий блоки вагового мультиплікатори світлового потоку, перший та підсумовування, причому перші - n-і оптичні виходругий формувачі сигналів статичних моментів, що ди блока заміни комплектів тіньових бінарних мамістять блок заміни комплектів тіньових бінарних сок спряжені зі входами ВІДПОВІДНО першої - п-і масок, першу та другу n-і пари оптичних перетвопари оптичних перетворювачів, виходи оптичних рювачів, першу та другу n-і пари фотоприймачів, перетворювачів першої та другої n-х пар з'єднані зі перший та другий блоки вагового складання, блок входами ВІДПОВІДНИХ фотоприймачів, виходи первіднімання та блок узгодження, блок керування, ших та других фотоприймачів усіх пар підключені причому, перші - п-і оптичні виходи блока заміни до ВІДПОВІДНИХ входів ВІДПОВІДНО першого та другокомплектів тіньових бінарних масок сполучені зі го вагових суматорів, виходи яких з'єднані з вховходами ВІДПОВІДНО першої - n-і пари оптичних дами підсумовування та віднімання блока відніперетворювачів, виходи оптичних перетворювачів мання, вихід якого підключений до входу блока першої та другої n-х пар з'єднані зі входами ВІДПОузгодження, виходи блоків узгодження першого та ВІДНИХ фотоприймачів, виходи перших та других другого формувачів сигналів статичних моментів фотоприймачів усіх пар підключені до ВІДПОВІДНИХ з'єднані з першою та другою групами керуючих ВХОДІВ ВІДПОВІДНО першого та другого вагових сувходів блока керування, перша та друга групи виматорів, виходи яких з'єднані з входами підсумоходів якого підключені до однойменних груп керувування та віднімання блока віднімання, вихід якоючих входів першого блока зміщення зображення, го підключений до входу блока узгодження, виходи третя - п'ята групи виходів якого підключені ВІДПОблоків узгодження першого та другого формувачів ВІДНО до першої та другий груп керуючих входів сигналів статичних моментів з'єднані з першою та другого блока зміщення зображення і керуючих другою групами керуючих входів блока управління, входів блока повороту зображення, перший та перша та друга групи виходів якого підключені до другий виходи світодільника оптично зв'язані зі однойменних груп керуючих входів першого блоку входами першого та другого мультиплікаторів і зміщення зображення, третя-п'ята група виходів світлового потоку, перші - п-і виходи яких оптичне підключені ВІДПОВІДНО до першої та другої груп зв'язані з однойменними інформаційними входами керуючих входів другого блока зміщення зобраблоків заміни комплектів тіньових бінарних масок ження та керуючих входів блока повороту зобрапершого та другого формувачів сигналів статичних ження, перший та другий виходи світодільника моментів, керуючі виходи та керуючі входи блоків оптично зв'язані зі входами першого та другого заміни комплектів тіньових бінарних масок першомультиплікаторів світлового потоку, перші - п-і виго та другого формувачів сигналів статичних моходи яких оптично зв'язані з однойменними інфоментів підключені ВІДПОВІДНО до першого та другормаційними входами блоків заміни комплектів тіго керуючих входів першої та другої груп керуючих ньових бінарних масок першого та другого виходів блока керування, вхід запуску, настановформувачів сигналів статичних моментів, згідно лювальні входи та виходи якого є однойменними винаходу, додатково для кожного формувача сигвходами та виходами пристрою Недоліком цього налів статичних моментів в блок заміни комплектів пристрою є обмежена область застосування та тіньових бінарних масок введені додаткові компленизькі функціональні можливості, оскільки пристрій кти масок, керуючі виходи та керуючі входи блоків не дозволяє розпізнавати з виділених класів підзаміни комплектів тіньових бінарних масок першокласи зображень го та другого формувачів сигналів статичних моментів підключені ВІДПОВІДНО до першого та другоВ основу винаходу поставлена задача розробго керуючих входів, першої та другої груп керуючих ки пристрою для розпізнавання симетричності зовиходів блока керування, вхід запуску, встановлюбражень об'єктів за новими ознаками шляхом ввевальні входи та виходи якого є однойменними дення в блок заміни комплектів масок додаткових входами та виходами пристрою, а блок керування комплектів та вдосконалення блока керування за включає в себе пристрій мікропрограмного керурахунок введення в нього додатково розроблених вання, пристрій фіксації зміщень вздовж осей X та нових блоків, що дозволять формувати додатково У та пристрій фіксації класів і підкласів симетричнові ВИСЛІДНІ сигнали, які відповідають 4-м рішенних об'єктів, причому пристрій мікропрограмного ням, що приймаються, підкласів центральної сикерування (ПМПК) блока керування містить прометрії (про наявність нескінченного числа осей, грамований постійний пристрій запам'ятовування про наявність однієї пари осей, про наявність пар(ППЗ), регістр, п'ять дешифраторів, генератор ного числа пар осей, про наявність непарного чистактових імпульсів, два RS - тригери , логічний ла пар осей) та 2-м рішенням, що приймаються, елемент 21 - АБО - НІ, елемент НІ, три блоки елепідкласів симетрії (про наявність однієї осі X або Y, ментів 21 - НІ, елемент І, причому вхід запуску про наявність декількох осей X або Y), в результаті пристрою з'єднаний з S - входом першого тригера чого забезпечується виділення підкласів зобравходом обнуління регістру, прямий вихід першого жень, отже, поширюється область застосування тригера з'єднаний з першим входом елементу І, пристрою ,що заявляється, та його функціональні другий вхід якого підключений до виходу генераможливості тора тактових імпульсів, а вихід - до входу тактових сигналів регістру, інверсний вихід першого Поставлена задача вирішується за рахунок тотригера з'єднаний з четвертим виходом блоку го, що пристрій для розпізнання симетричності керування, У ППЗ інформаційні входи з першого зображень об'єктів, що містить перший блок зміпо п'ятий з'єднані з ВІДПОВІДНИМИ виходами третьощення зображень, оптичний вхід якого є інформаго блока елементів 21 - НІ, а інформаційні виходи ційним входом пристрою, послідовно розміщені на з першого по двадцять шостий - з ВІДПОВІДНИМИ одній оптичній осі блок повороту зображення, другий блок зміщення зображення, перший та другий інформаційними входами регістру, у якого інформаційні виходи з першого по дванадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами дешифраторів з першого по четвертий, інформаційні виходи з тринадцятого по шістнадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами п'ятого дешифратора, а інформаційні виходи з сімнадцятого по двадцять шостий з'єднані з першими входами першого та другого блоків елементів 2І-НІ, другі входи першого блоку елементів 21 - НІ підключені до виходу елемента 21 - АБО - НІ, що з'єднаний через елемент НІ зі другими входами другого блока елементів 21 - НІ, а виходи першого та другого блоків елементів 21 - НІ з'єднані з ВІДПОВІДНИМИ входами третього блока елементів 21 НІ, два керуючих входи у п'ятих дешифраторів підключені до шини нульового потенціалу пристрою, а виходи п'ятого дешифратора з першого по десятий з'єднані з другою групою входів елемента 21 - АБО -НІ, перша група входів якого з першого по шостий вхід з'єднана ВІДПОВІДНО З першим і другим входами та входами першої і другої групи керуючих входів блоку керування, сьомий і восьмий входи - з першим та другим керуючими входами ПМПК, дев'ятий вхід - з інверсним виходом другого тригера, а десятий вхід - з третім виходом блока керування, виходи дешифраторів з першого по четвертий є ВІДПОВІДНИМИ виходами ПМПК з першого по двадцять третій, причому шостий вихід четвертого дешифратора з'єднаний з R - входом першого тригера, а перший вихід першого дешифратора та другий вихід четвертого дешифратора підключені ВІДПОВІДНО до R - входу і S - входу другого тригера, пристрій фіксації зміщень вздовж осей X та У (ПФЗ) блока керування містить шість ЛІЧИЛЬНИКІВ дешифратор, два оперативних пристрої запам'ятовування (ОПЗ), два елемента НІ, дві групи по К елементів АБО, елемент АБО, причому інформаційні входи першого і другого ЛІЧИЛЬНИКІВ з'єднані ВІДПОВІДНО з k - розрядним шостим і І - розрядним сьомим входами блока керування, інформаційні входи третього і п'ятого ЛІЧИЛЬНИКІВ підключені до п - розрядного четвертого входу блока керування, а інформаційні входи четвертого і шостого ЛІЧИЛЬНИКІВ - до m - розрядного п'ятого входу блоку управління, причому 52678 10 ПФЗ блока керування, входи обнуления ЛІЧИЛЬНИКІВ з першого по четвертий з'єднані з першим входом ПФЗ, входи обнуления п'ятого та шостого ЛІЧИЛЬНИКІВ підключені до виходів елемента АБО, входи якого з'єднані з першим та сімнадцятим k = log2K, I = log2L, n = log2N, m = log2M, де К - число комплектів масок, L = 907Дф,Дф - крок повороту, NxM - розмірність інформаційного поля, причому інформаційні k - розрядні виходи першого лічильника підключені до першої та другої груп керуючих виходів блока керування, інформаційні І розрядні виходи другого лічильника - до п'ятої групи виходів блока керування, інформаційні п - розрядні виходи третього і п'ятого ЛІЧИЛЬНИКІВ - до першої та третьої групи виходів блока керування, інформаційні m - розрядні виходи четвертого та шостого ЛІЧИЛЬНИКІВ - до другої та четвертої груп виходів блока керування, інверсні виходи першого та другого ЛІЧИЛЬНИКІВ через перший та другий елементи НІ з'єднані з першим та другим керуючими входами ПМПК блока керування, виходи К кристалів першого та другого ОПЗ об'єднані в (К х п) і (К х т ) - розрядні шини та підключені ВІДПОВІДНО до першого та другого інформаційних виходів входами ПФЗ, входи РЕ першого та другого ЛІЧИЛЬНИКІВ з'єднані ВІДПОВІДНО з другим та десятим входами ПФЗ, входи РЕ третього та четвертого ЛІЧИЛЬНИКІВ підключені до третього входу ПФЗ, входи РЕ п'ятого та шостого ЛІЧИЛЬНИКІВ - до четвертого входу ПФЗ, входи підсумування першого та другого ЛІЧИЛЬНИКІВ підключені до шини нульового потенціалу пристрою, входи підсушування ЛІЧИЛЬНИКІВ з третього по шостий з'єднані ВІДПОВІДНО з п'ятим, сьомим, одинадцятим та тринадцятим входами ПФЗ, входи віднімання ЛІЧИЛЬНИКІВ З першого по шостий з'єднані ВІДПОВІДНО З дев'ятим, шістнадцятим, шостим, восьмим, дванадцятим та чотирнадцятим входами ПФЗ, інформаційні виходи першого лічильника з'єднані з інформаційними входами дешифратора, керуючі входи якого підключені до шини нульового потенціалу, а інверсні виходи з першого по К-й з'єднані ВІДПОВІДНО З входами CS К кристалів першого та другого ОПЗ, адресні входи яких підключені до інформаційних виходів другого лічильника, а входи WE - до виходів ВІДПОВІДНИХ першої та другої груп елементів АБО, у яких інверсний вхід з'єднаний з п'ятнадцятим входом ПФЗ, а прямий вхід - з вісімнадцятим входом ПФЗ, інформаційні входи першого ОПЗ з'єднані з інформаційними виходами п'ятого лічильника, а інформаційні входи другого ОПЗ - з інформаційними виходами шостого лічильника, входи ПФЗ з першого по вісімнадцятий з'єднані з ВІДПОВІДНИМИ з першого по вісімнадцятий виходами ПМПУ, причому пристрій фіксації класів і підкласів симетричних об'єктів (ПФКІП) блока керування містить дві групи по К схем порівняння, два лічильника, два регістри, два дешифратора, дві схеми перевірки на парність, чотири тригери, дванадцять елементів І, два елементи І - НІ, два елементи АБО - НІ, елемент НЕРІВНОЗНАЧНІСТЬ, два елементи НІ, причому входи першої групи у схем порівняння першої і другої групи підключені ВІДПОВІДНО до виходів першої і другої груп ПФЗ, а входи другої групи - до шини нульового потенціалу пристрою, виходи схем порівняння першої групи з'єднані з входами першого елемента І, вихід якого підключений до першого входу другого елемента і, другий вхід якого з'єднаний з прямим виходом першого тригера, а вихід - з D-входом першого тригера і через перший елемент НІ з входом ЕО першої схеми перевірки на парність, крім того, вихід другого елементу І з'єднаний з входами DSR і SO першого регістру, входом ЕЕ першої схеми перевірки на парність і входом РЕ та входом віднімання першого лічильника, виходи схем порівняння другої групи з'єднані з входами третього елементу І, вихід якого підключений до першого входу четвертого елементу І, другий вхід якого з'єднаний з прямим виходом другого тригера, а вихід - 3 D - входом другого тригера і через другий елемент НІ з входом ЕО другої схеми перевірки на парність, крім того, вихід четвертого елементу І 12 11 52678 з'єднаний з входами DSR і SO другого регістру, елементів І з девятого по дванадцятий, вихід входом ЕЕ другої схеми перевірки на парність і першого елемента АБО - НІ підключений до третього виходу блока керування, а виходи дев'ятого входом РЕ та входом віднімання другого лічильта одинадцятого елементів І - до десятого та деника, у першого та другого тригерів тактовий вхід, в'ятого виходів блока керування ВІДПОВІДНО, а танастановний вхід в "0" та S - вхід з'єднані ВІДПОВІДкож до інверсних входів десятого та дванадцятого НО з третім, першим та другим входами ПФКІП, елементів І, у яких виходи з'єднані з дванадцятим причому прямі виходи першого і другого тригерів та одинадцятим виходами блока керування, крім з'єднані з входами елемента НЕРІВНОЗНАЧтого, п'ять входів ПФКІП з'єднані з першим, дев'ятНІСТЬ, першого елемента АБО - НІ та п'ятого надцятим, двадцять першим, двадцять другим та елемента І, інверсний вихід першого тригера з'єддвадцять третім виходами ПМПК наний з другим входом дванадцятого елемента І, а Сутність пристрою, який заявляється полягає інверсний вихід другого тригера - з другим входом в тому, що для формування вислідних сигналів, які десятого елемента І, у першого та другого регіствідповідають прийняттю рішень про клас, який рів входи DSR та SO підключені до шини нульового виділяється або підклас, розпізнання зображень потенціалу пристрою, тактовий вхід з'єднаний з ведеться за рахунок здійснення операцій первинчетвертим входом ПФКІП, а настановний вхід в "0" ного та повторних центрувань відносно ортогона- з ВІДПОВІДНИМ виходом старшого розряду регістльних осей X та Y, причому процедура повторних ру, причому інформаційні виходи першого та друцентрувань складається з двох етапів, на першому гого регістрів підключені до інформаційних входів з яких використовуються ознаки розпізнання класів першої та другої схем перевірки на парність ВІДПОзображень, а на другому - нові ознаки розпізнання ВІДНО, у яких виходи ZE парності з'єднані з другим підкласів зображень та третім входами сьомого елемента І, а виходи Z0 непарності з другим та третім входами восьмоДля здійснення операцій первинного та повтого елемента І, у першого та другого ЛІЧИЛЬНИКІВ рних центрувань (дивтаблі) відносно ортогонанастановний вхід в "0" та вхід підсумування підльних осей X та Y використовуються ВІДПОВІДНО ключені ВІДПОВІДНО до першого та четвертого вхоперший та другий формувачі сигналів статичних дів ПФКІП, а інформаційні виходи з'єднані з інфомоментів частин зображення, в яких СВІТЛОВІ сигрмаційними входами першого та другого нали статичних моментів частин зображення фордешифраторів ВІДПОВІДНО, у яких входи ЕО і Е1 муються оптичним перетворенням світлового попідключені до шини нульового потенціалу притоку (розподіл, просторова модуляція строю, інверсні виходи першого та другого розряінтенсивності та и інтегрування) оптичними блокадів першого дешифратора з'єднані з входами ми Просторова модуляція інтенсивності фрагменпершого елемента І - НІ, інверсні виходи першого тів зображення по вагам координат в умовних та другого розрядів другого дешифратора - з вхоодиницях здійснюється за допомогою бінарних дами другого елементу І - НІ, інверсні виходи (L тіньових масок На першому етапі повторних 1) - х розрядів першого та другого дешифраторів центрувань використовуються комплекти масок підключені до другого та третього входів другого для формування вислідного сигналу класу, на друелемента АБО - НІ, а інверсні виходи (L- 2) - х розгому - використовуються додаткові комплекти марядів - до інверсних входів одинадцятого та дев'ясок для формування вислідного сигналу підкласу, того елементів І ВІДПОВІДНО, у третього та четверотримання частин зображення в суміжних півплотого тригерів настановний вхід в "0" та тактовий щинах виконується оптичними перетворювачами з вхід підключені ВІДПОВІДНО до першого та п'ятого наступним перетворенням світлових сигналів в входів ПФКІП, a D - входи - до виходів елемента електричні за рахунок фотоприймальннх приладів НЕРІВНОЗНАЧНІСТЬ та п'ятого елемента 1 ВІДПОВизначення зважених сум інтенсивностей зобраВІДНО, прямий вихід четвертого тригера підключеження, які відповідають визначенню статичних ний до першого виходу блока керування, до пермоментів в суміжних півплощинах виконується ших входів шостого, сьомого та восьмого аналоговими суматорами зі зваженим підсумуванелементів І та до інверсного входу другого елеменя м нту АБО - НІ, у якого вихід з'єднаний з п'ятим виІнформація про рівність статичних моментів ходом блока керування, другий та третій входи частин зображення або невідповідність цієї рівношостого елементу І підключені до виходів обох сті розшифровується та кодується станом сигналів елементів І - НІ, виходи шостого, сьомого та восьна виходах першого та другого формувачів сигнамого елементів І підключені ВІДПОВІДНО до шостого, лів статичних моментів частин зображення персьомого та восьмого виходів блока керування, шим та другим блоками узгодження і представляпрямий вихід третього тригера з'єднаний з другим ється в кожному першим та другим сигналами виходом блока керування та з першими входами кодуючого дворозрядного слова Таблиця 1 Значення операції та етапи Статичні моменти Абсциса Ордината Первинне тю тОі ГП20 Х1 х2 Мо2 ГПзо Хз Центрування Повторні 1 етап тоз Ма0 тРо і х 2 етап ти ГТІ12 ГП21 Х|+1 Х| +2 Х|+3 Хк 13 52678 Центрування Повторні 1 етап Аз А, Значення операції та етапи Точка "центра - образа" Зміщення Ах,, Ду та їх сукупності Первинне Аі 14 Продовження таблиці 1 А2 Дуі ДХ2 АУ2 {Дх }, {Ду} Зрівноваження статичних моментів ведеться за сигналами блоку управління та представляється кодами на його виходах для виконання зсуву зображення вздовж осей X та Y при використанні першого комплекту масок першим блоком зміщення, при використанні другого - К-го комплекту масок - другим блоком зміщення Причому, другий ~ К- й комплекти масок містять комплекти масок, відповідають зрівноваженню моментів ГИ «о та П1о$ на першому етапі повторних центрувань, та комплекти масок, які відповідають зрівноваженню моментів Шар, на другому етапі повторних центрувань Заміна другого та К-го комплектів тіньових бінарних масок в першому та другому формувачах сигналів статичних моментів здійснюється за сигналами блоку управління на керуючі входи блоків заміни комплектів тіньових бінарних масок Поворот зображення після заміни другого - К-го комплектів масок здійснюється з дискретним кроком за сигналами блоку управління на його виході Блок управління здійснює запуск пристрою, заміну числа комплектів масок на першому та другому етапах повторних центрувань, поворот зображення, фіксує та аналізує величини зміщень відносно ортогональних осей X та Y, на першому етапі повторних центрувань формує три вислідних сигнали класу, виділяє один з них, який відповідає ознакам наявності симетрії зображення ,яке досліджується відносно центру, осі або несиметричності, на другому етапі повторних центрувань формує чотири вислідних сигнали підкласу центральної симетрії з ортогональними осями X та Y, які відповідають наявності безмежного їх числа, однієї пари осей X та Y, парного числа пар ортогональних осей та непарного числа пар ортогональних осей Хта YTa два вислідних сигнали підкласу осьової симетрії, які відповідають наявності однієї конкретної осі X або У, декількох осей X або У, виділяє один з них, а також виробляє сигнал "Кінець операції розпізнання " На фіг 1 показана блок-схема пристрою, що заявляється, на фіг 2 - функціональна схема першого формувача сигналів статичних моментів, на фіг 3 - варіант виконання блока узгодження, на фіг 4 - блок-схема алгоритму функціонування блока керування, на фіг 5 - варіант виконання функціональної схеми пристрою мікропрограмного керування блоку керування, на фіг 6 - варіант виконання функціональної схеми пристрою фіксації зміщень вздовж осей Хта Y блока керування, на фіг 7 - варіант виконання функціональної Дх, Ду, 2 етап А|+з Дх, +3 Дх, + і ДХ, +2 Ду+1 ДУі+2 ДУі+з Дхкі Дук і {Дх'і},{Ду'і} схеми пристрою фіксації класів і підкласів симетричних об'єктів, на фіг 8 - для центральносиметричних зображень виділені ознаки класу та підкласу, на фіг 9 - для зображень з осьовою симетрією виділені ознаки класу та підкласу, на фіг 10 показана ілюстрація вхідної орієнтації несиметричного зображення об'єкта з його "центром - образом" та зв'язане з ним поле зору, на фіг 11 - приклад розкладання симетричного зображення об'єкта відносно осей X та Y за фрагментами, отриманими після модулювання першим комплектом масок ВІДПОВІДНО В першому та в другому формувачах сигналів статичних моментів, на фіг 12 - приклад розкладання симетричного зображення об'єкта відносно осі Хта У за фрагментами, отриманими після модулювання комплектом масок на першому етапі повторних центрувань ВІДПОВІДНО в першому та в другому формувачах сигналів статичних моментів, на фіг 13 - приклад розкладання симетричного зображення об'єкта відносно осі Хта Y за фрагментами, отриманими після модулювання комплектом масок на другому етапі повторних центрувань ВІДПОВІДНО в першому та в другому формувачах сигналів статичних моментів, Пристрій, який заявляється (див фіг 1), містить перший блок зміщення (БЗ) 1 з проекціюючою оптикою, блок повороту зображень (БПЗ) 2, другий блок зміщення (БЗ) 3, перший та другий мультиплікатори (М) 4, перший та другий формувачі сигналів статичних моментів частин зображень (ФССМ) 5 та 6, перший та другий блоки заміни бінарних масок (БЗМ) 7 та 8, перший та другий блоки узгодження с (БУз) 9 та 10 Першим входом пристрою є оптичний вхід першого блока зміщення, вихід якого оптично з'єднаний з входом блока повороту зображення 2, вихід блока повороту зображення 2 оптично зв'язаний з входом другого блока зміщення 3, вихід другого блока зміщення оптично узгоджений та зв'язаний з входами пе ршого та другого мультиплікаторів 4, які послідовно розміщені на одній оптичній осі з першим та другим виходами світлоподільника Перший - п-й виходи першого та другого мультиплікаторів оптично зв'язані з однойменними інформаційними входами блоків заміни комплектів тіньових бінарних масок 7 та 8 ВІДПОВІДНО В формувачах сигналів статичних моментів 5 та 6 Керуючі виходи блоків заміни комплектів тіньових бінарних масок 7 та 8 першого та другого формувачів сигналів статичних моментів 5 та 6 ВІДПОВІДНО підключені до першого 12 та другого 13 керуючих входів блока керування 11 Виходи блоків узгодження 9 та 10 першого та 15 другого формувачів 5 та 6 з'єднані з входами 14 та 35 першої і входами 16 та 17 другої груп керуючих входів блока керування 11 Вхід запуску 18, настановні входи 19, 20, 2 1 , 22 завдання ВІДПОВІДНО розмірності матриці зображення, яка аналізується Н = max {М, N} в рядок М і стовпцями N, КІЛЬКІСТЬ К комплектів масок і числа поворотів L зображення, блока керування 11 є однойменними входами пристрою Перша та друга групи керуючих виходів 23 блока керування 11 підключені ВІДПОВІДНО ДО керуючих входів 24 та 25 блока заміни комплектів тіньових бінарних масок 7 та 8 Перша та друга групи виходів 26, 27 блока керування 11 підключені до однойменних груп керуючих входів першого блока зміщення 1 Третя-п'ята групи виходів 28, 29, ЗО блока керування 11 підключені до першої та другої груп керуючих входів другого блока зміщення 3 і керуючих входів блока повороту 2 Перший-дванадцятий виходи 31 -42 блока керування 11 є виходами пристрою Перших три виходи 3 1 , 32, 33 є виходами вислідних сигналів класів зображень, при цьому перший вихід 31 є виходом вислідного сигналу, за яким приймається рішення про наявність центральної симетрії, другий вихід 32 - виходом вислідного сигналу, по яким приймається рішення про наявність осьової симетрії, третій вихід 33- виходом вислідного сигналу, за яким приймається рішення про наявність несиметричного зображення, вихід 34 - виходом сигналу "Кінець операції розпізнавання" Виходи 35-38 є виходами вислідних сигналів підкласу зображень, які розпізнаються центральної симетрії з ортогональними осями X та Y, при цьому вихід 35 є виходом вислідного сигналу, за яким приймається рішення про наявність безмежного їх числа, вихід 36 - вислідного сигналу, за яким приймається рішення про наявність однієї пари ортогональних осей X та Y, вихід 37 - виходом вислідного сигналу, за яким приймається рішення про наявність парного числа пар ортогональних осей, вихід 38 виходом вислідного сигналу, за яким приймається рішення про наявність непарного числа пар ортогональних осей Виходи 39 - 42 є виходами вислідних сигналів підкласу зображень, які розпізнаються з осьовою симетрією, при цьому виходи 39, 40 є виходами вислідних сигналів, за якими приймається рішення про наявність однієї осі симетрії, ВІДПОВІДНО X або Y, виходи 4 1 , 42 - виходами вислідних сигналів, по яким приймається рішення про наявність декількох осей симетрії, ВІДПОВІДНО ХабоУ Перший формувач сигналів статичних моментів (ФССМ) 5 (див фіг 2) містить блок заміни комплектів тіньових бінарних масок (БЗМ) 7, в який входять дешифратор (Д) 43, К електромагнітів ( Е г Ек) 44і 44 К , які відповідають К комплектам тіньових бінарних масок, які використовуються при обробці Входи дешифратора 43 є входами блоку заміни комплектів тіньових бінарних масок 7 К виходів дешифратора підключені до ВІДПОВІДНИХ керуючих входів (в даному разі, до обмоток) К електромагнітів 44і 44 К таким чином, що і-ий вихід дешифратора 43, з'єднаний з керуючим входом (обмоткою) і-го електромагніта 44, який утримує і у штангу з прозорою і-ю підкладкою для кріплення 52678 16 і- го комплекту тіньових бінарних масок (КТБМ) 4 5 г 45 П А кожний і-й комплект встановлений на і-й прозорій підкладці, на якій закріплені п-тіньових бінарних масок 45і - 45 П з двома коефіцієнтами пропускання Причому один кінець І-І прозорої підкладки містить рухомий контакт (РК) 46, вивід якого з'єднаний з шиною нульового потенціалу пристрою, який замкнений непорушним контактом (НК) 47, вивід якого з'єднаний з першим виводом резистора (R) 48 і є виходом блоку заміни комплектів бінарних тіньових масок 7 першого формувача статичних сигналів 5, першу - п пари оптичних перетворювачів (ОП) 49і-49 п , у вигляді 2п пірамідальних фоконов, першу - п пари фотоприймачів (ФП), складаються з перших (непарних) 50і 1,502 і,50з і, ,50 п і та других (парних) 50-І 2, 502 2,50П2 фотоприймачів (де друга нижня цифра груп фотоприймачів і означає непарну групу, 2 - парну групу), перший та другий вагові суматори (ВС) 5 1 , 52, блок віднімання (БВ) 53 та блок узгодження (БУз) 9 Перший блок узгодження 9 (див фіг 3) містить перший 54 та другий 55 компаратори (К), елемент НЕРІВНОЗНАЧНОСТІ 56, причому перший інвертуючий вхід першого компаратора 54 та другий інвертуючий вхід другого компаратора 55 підключені до входу блока узгодження 9, другий інвертуючий вхід першого компаратора 54 з'єднаний з джерелом першої опорної напруги +U, а другий нешвертуючий вхід другого компаратора 55 з'єднаний з джерелом другої опорної напруги -U, вихід першого компаратора 54 з'єднаний з першим входом елемента НЕРІВНОЗНАЧНІСТЬ 56, вихід другого компаратора 55 з'єднаний з другим входом елемента НЕРІВНОЗНАЧНІСТЬ 56, а також є виходом старшого розряду А логічного сигналу блока узгодження вихід елементу НЕРІВНОЗНАЧНІСТБ56 с виходом молодшого розряду В логічного сигналу блока узгодження 9 Блок узгодження 9, як і блок заміни комплектів тіньових бінарних масок 7, входить в структуру формувача сигналів статичних моментів 5 (див фіг 2), а на фіг 1 означені блоки обведені штриховою ЛІНІЄЮ На фіг 4 показаний алгоритм функціонування блока керування 11, а на фіг 5, 6, 7 - функціональні схеми ВІДПОВІДНО пристрою 57 мікропрограмного керування (ПМПК), пристрої 58 фіксації зміщень (ПФЗ) вздовж осей X та У, пристрій 59 фіксації класів і підкласів симетричних об'єктів (ПФКІП) Пристрій 57 мікропрограмного керування (ПМПК) (див фіг 5) містить програмований ППЗ 60, регістр 6 1 , дешифратори 62, 63, 64, 65, 66, генератор 67 тактових імпульсів, тригери 68, 69, логічний елемент 21-АБО-НІ 70, елемент НІ 7 1 , блоки елементів 21- НІ 72, 73, 74, елемент 175 Вхід 18 запуску пристрою з'єднаний з Sвходом тригера 68 і входом обнуління регістру 6 1 , прямий вихід тригера 68 з'єднаний з першим входом елементу 175, другий вхід якого підключений до виходу генератора 67 , а вихід - до входу тактових сигналів регістру 61 Інверсний вихід тригера 68 з'єднаний з виходом 34 сигналу "Кінець операції розпізнання" пристрою У ППЗ 60 інформаційні входи з першого по п'ятий з'єднані з ВІДПОВІДНИМИ виходами блоку елементів 21-НІ 74, а інформацій 17 52678 ні виходи з першого по двадцять шостий - з ВІДПОВІДНИМИ інформаційними входами регістру 6 1 , у якого інформаційні виходи з першого до дванадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами дешифраторів 62-65, інформаційні виходи з тринадцятого по шістнадцятий з'єднані з ВІДПОВІДНИМИ інформаційними входами дешифратора 66, а інформаційні виходи з сімнадцятого по двадцять шостий з'єднані з першими входами блоків елементів 21-НІ 72, 73 Другі входи блока елементів 21-НІ 72 підключені до виходу елемента 2 1 АБО-НІ 70, який через елемент НІ 71 з'єднаний з другими входами блоку елементів 21-НІ 73, а виходи блоків елементів 21-НІ 72, 73 з'єднані з ВІДПОВІДНИМИ входами блоку елементів 21 -НІ 74 Два керуючих входи у дешифраторів 62-66 підключені до шини нульового потенціалу, а виходи дешифратора 66 з першого по десятий з'єднані з другою групою входів елементу 21-АБО-НІ 70, перша група входів якого з першого по шостий вхід з'єднана ВІДПОВІДНО з керуючими входами 12, 13, 15, 17, 14, 16 блока 1 1 , сьомий і восьмий входи - з керуючими входами 76 і 77 ПМПК 57, дев'ятий вхід - з інверсним виходом тригера 69, а десятий вхід - з керуючим виходом 33 блока керування 11 Виходи дешифраторів 62-65 є ВІДПОВІДНИМИ виходами 78-100 ПМПК 57, причому шостий вихід Yk дешифратора 65 з'єднаний з R-входом тригера 68, а виходи 78 і 97 ПМПК 57 підключені ВІДПОВІДНО ДО R- входу і S входу тригера 69 Пристрій 58 фіксації зміщень (ПФЗ) вздовж осей X та У (див фіг 6) містить лічильники 101, 106, дешифратор 107, оперативні пристрої запам'ятовування (ОПЗ) 108 і 109, елементи НІ 110, 111, К елементів АБО 112, К елементів АБО 113, елемент АБО 114 Інформаційні входи ЛІЧИЛЬНИКІВ 101 і 102 з'єднані ВІДПОВІДНО з k-розрядним входом 21 та ірозрядним входом 22 блока керування 1 1 , інформаційні входи ЛІЧИЛЬНИКІВ 103 і 105 підключені до п- розрядного входу 19 блока керування 1 1 , а інформаційні входи ЛІЧИЛЬНИКІВ 104 і 106 - до т розрядного входу 20 блока управління 1 1 , причому k = iog2K, I = log2L, n = log2N, m = log2M, де К - число комплектів масок, L = 90°/ДфДфі - крок повороту, NxM - розмірність інформаційного поля Виходи ПМПУ 57 з 78 по 95 з'єднані з ВІДПОВІДНИМИ входами 58, інформаційні k - розрядні виходи лічильника 101 підключені до виходу 23 блока керування 1 1 , інформаційні І - розрядні виходи лічильника 102 до виходу ЗО блока керування 1 1 , а інформаційні п - розрядні виходи ЛІЧИЛЬНИКІВ 103 і 105 з'єднані ВІДПОВІДНО з виходами 26 і 28 блока керування 1 1 , а інформаційні т - розрядні виходи ЛІЧИЛЬНИКІВ 104 і 106 - з виходами 27 і 29 блока керування 11 Інверсні виходи У відносно осі у', а формувач 6 — в півплощинах у' О' відносно осі х 1 В формувачах 5 та 6 формуються результати для порівняння сигналів статичних моментів в суміжних площинах, ВІДПОВІДНО т 1 0 х'0' т 0 1 у'> 0) Зрівноваження статичних моментів більш високих порядків здійснюється за рахунок другого блока зміщення 3 , а коди на зміщення вздовж осей Х т а Y подаються ВІДПОВІДНО ПО П - розрядній та m - розрядній шинам, четвертій та п'ятій групам керуючих виходів 28 та 29 від блока керування 11 Початок першого етапу повторних центрувань здійснюється при виставленому другому комплекті масок 45і - 45П блоками 7 та 8, необхідних для формування статичних моментів х'0' у' 0' при первинному центруванні та сигнали статичних моментів більш високого порядку т а о , тор н а першому етапі, т а р на другому етапі повторних центрувань Блок заміни комплектів тіньових бінарних масок 7 формувача 5 містить n-комплектів тіньових бінарних масок 45і - 45 П з двома коефіцієнтами перепускання Кі = 1, «2 = 0, притому частина з них (2, 3, , п) використовуються на першому етапі, друга (j + 1, j + 2, , k) - на другому етапі повторних центрувань коефіцієнту К-і = 1 для 1, 2, 3, ,, j-ro комплектів масок відповідають прозорі смуги (заштриховані), коефіцієнту «2 = 1 - непрозорі смуги (заштриховані) смуги тіньових масок, причому вісь симетрії кожної тіньової бінарної маски паралельна напряму и прозорих та непрозорих смуг ТІНЬОВІ маски «2 = 0 першого комплекту модулюють опти (6) На виході 39 блока керування виробляється сигнал, ВІДПОВІДНИЙ ознаці Z21 наявності одній конкретної осі симетрії X , що відповідає періоду інваріантної ознаки Сигнал на вході 40 буде отриманий в випадку визначення ознаки Z22, ВІДПОВІДНОГО наявності однієї конкретної осі симетрії Y', оскільки {Ду'} Ф 0, {Дх',} = 0 Тобто А і , А 2 , A3, , A,, A J + i, AJ+2, ,AkcX, (7) Хі = Х2 = Х 3 = = X , = XJ+1 = X J + 2 = =Xk, (8) У1 * У2 * Уз * * У] * y J + i * y J + 2 * * Ук (9) Ознаки Z23, Z24 містять в собі інформацію про наявність декількох осей X, Y В даному випадку Z23 - ознака наявності декількох осей X , визначається за сигналом на вході 41 блоку управління, якщо при повороті зображення від 0 ті/2 для додаткових комплектів масок а, р фіксується декілька раз (непарних) значень зміщень вздовж однієї осіХ, тобто {Ду'і} = 0, а {Дх'і} Ф 0 Ознака Z24, яка відповідає наявності декількох осей Y', визначається по сигналу на виході 42 блока керування, якщо при повороті зображення від 0 ті/2 для додаткових комплектів масок а, р фіксується декілька раз значення зміщень вздовж осі Y, тобто, {Ду'і} у'0' ор 6 в суміжних півплощистатичних моментів 27 52678 a p Таким чином, функції перепускання k(x ) i k(y ) фільтру у формувачах 5 та 6 ВІДПОВІДНО, В загальному вигляді можуть бути записані так 1,якщок =1вроскладанніХ = 1=1 0, в протилежно му випадку 1, якщо k = 1 в роскладанн і у = £ k 2 l л ,x=0, 02) (13) 0, в протилежно му випадку КІЛЬКІСТЬ ТІНЬОВИХ бінарних масок для кожного комплекту в блоках заміни комплектів масок 7 та 8 різноманітна, залежить від вимірності інформаційного поля N (М) та порядку статичного моменту а(Р), в загальному випадку визначається так a n = log2N (14) де N = М - вимірність інформаційного поля а, р - порядок статичних моментів а, р На другому етапі повторних центрувань j + 1, j + 2, , k комплектами тіньових бінарних масок 5 формувачем здійснюється просторова модуляція оптичних сигналів статичних моментів змішаних х'0" порядків m в суміжних півплощинах, m ар ар формувачі статичних моментів 6 у'0' х'>0' U12 - для других фотоприймачів Таким чином, на виходах д-х перших та других фотоприймачів 50д і та 5092 отримані електричні сигнали, які відповідають інтенсивностям д-х фрагментів зображення в півплощинах х' 0', х'0' тобто ФРс та ФРс В якості фотоприймачів можуть використовуватися фоторезнстори, фотодюди, фототранзистори та схеми на їхній основі, причому від фотоприймачів кожної пари вимагається, тільки ідентичність характеристик перетворення Просторове інтегрування сум інтенсивностей частин зображення в півплощинах х' 0' здійснюється ваговими суматорами 51 та 52 зі зваженим підсумуванням Визначення значень зважених сум інтенсивностей частин зображення відповідає визначенню статичних моментів т ю , тої в суміжних півплощинах при первинному центруванні та визначенню статичних моментів т а р - при повторних центруваннях, причому на першому етапі повторних центрувань один з індексів а або р дорівнює кулю, на другому етапі змішані індекси а і р, ВІДМІННІ ВІД нуля Статичні моменти map (а = 1, р = 0 та а = 0, 0> = 1 для первинного центрування, а = 2, 3, ,р=0 та а = 0, р = 2, 3, , першого етапу та а, 3 = 1, І> 2 для другого етапу повторних центрувань), які врівноважуються відносно осі X' формувачем 5 в матричній формі можуть бути представлені mf х'0' ДЄ ffX+ДХі)- яскравість вхідного зображення, прийому враховує можливість його зсуву при і-му центруванні вздовж осі X, Фрі, Фрг, , Фр п - фрагменти зображення, передбачені і-м комплектом 1,2,,, п-ю масками Оскільки ваговий суматор 51 по входам перших фотоприймачів здійснює підсумування напруг, отриманих при інтегруванні інтенсивностей зображення в півплощинах х' < о', а ваговий суматор 52 по входом других фотоприймачів здійснює підсумування напруг в півплощинах х' 0 +2 1 |fI(x±Ax i ),y]©]© (20) 11 1 + 2 " Щх+ДхДу]©]© В якості вагового суматора може бути використаний підсилювач з ваговим опором на вході (Б И Анисимов, В Н Четвериков "Преобразование информации для ЭЦВМ" "Высшая школа" М , 1968, с-, 217-219) Значення сумарних електричних сигналів, що визначаються виразами (19) та (20), надходять на входи блока віднімання 53 Блок віднімання 53 порівнює сумарні напруги вхідних сигналів, що еквівалентно порівнянню сум сумарних інтенсивностей в означених півплощинах або величин статичних моментів частин зображений в залежності від виставленого комплекту масок в блоку 7, і видає результат порівняння у вигляді вихідної напруги U В даному випадку сумарна напруга з виходу першого вагового суматора 52 надходить на вхід віднімання блоку віднімання 53 При цьому на виході блока 53 формується напруга U Перший блок узгодження 9 працює таким тином, що розшифровує та кодує стан сигналу на виході блока 53 у формувачі 5 Оскільки робота першого блоку узгодження 9 ідентична роботі другого блоку узгодження 10, то розглянемо роботу одного з них, наприклад 9, Перший блок узгодження 9 (див фіг 3) складається з першого 54 та другого 55 компараторів, що містять сигнали опорної напруги, ВІДПОВІДНО на другому інвертуючому вході першого компаратора 54 значення +Ui, на другому нешвертуючому вході другого компаратора 55 -ІІ2 Вихідна напруга U, присутня на виході блоку 53, відповідає сигналу, що сформувався, амплітуда якого може приймати позитивний або негативний знак, але не перебільшує значення опорної напруги На виході блоку 53 центроване положення фіксується першим 54 та другим 55 компараторами х'0' т. якщо = Ui = ІІ2, що відповідає коду 00, де UBX = U У випадку нерівності статичних моментів необхідно виконати зсув ліворуч х'0' , якщо U B X U2, що праворуч m ар х'0' якщо U B X >U2, що відповідає коду 10 Оскільки ДЛЯ кодування дворозрядного слова необхідно врахувати зсув зображення та напрямок зрушення, то молодший розряд у даному випадку представляється логічною одиницею, якщо при зрівноваженні статичних моментів виникає необхідність зсуву, а старший розряд А представляється догідною одиницею при зсуві праворуч та логічним нулем при зсуві ліворуч При цьому молодший розряд на виході елемента НЕРІВНОЗНАЧНІСТЬ 56 представляється логічною одиницею, якщо один з його входів приймає стан логічної одиниці, з другої - логічногонуля, Вихідний сигнал В по молодшому розряду визначається на виході блоку узгодження функцією виходу B=CD + DC, (13) А кодування та розшифрування комбінацій стану логічного сигналу блоку узгодження 9 представлено в табл 2 Таким чином, на виході ВІДПОВІДНО першого та другого блоків узгодження 9 та 10 у формувачах 5 та б формуються два логічних сигнали, що є першим (старшим розрядом) та другим (молодшим розрядом) логічними сигналами дворозрядного слова, які надходять ВІДПОВІДНО на першу та другу групи входів 14, 15 та 16, 17 блока керування 11 Блок керування 11 працює наступним чином Пристрій 57 мікропрограмного керування (ПМПК) (див фіг 5) блока керування 11 може бути побудований на основі принципу програмного керування, який використовує операційно - адресну структуру керуючих слів Необхідні для управління функціонуванням пристрою керуючі ЛОГІЧНІ сигнали наведені в табл 3, а ПОСЛІДОВНІСТЬ формування керуючих сигналів Yo, , Y22 - на наведеному алгоритмі (див фіг 4) Синтез ПМПК 57 з програмованою логікою зводиться до розробки схеми ПМПК 57 та до створення мікропрограми, яка повинна бути записана в ППЗ 60 Розбивка закодованих керуючих сигналів по полям мікрокоманди наведена в табл 4 33 34 52678 Таблиця 2 № п/п 1 2 3 С 0 0 1 Стан вихідного сигналу D А 0 0 1 0 0 1 В 0 1 1 ВІДПОВІДНІСТЬ центрованому положенню або зсуву центроване положення зсув вліво зсув вправо Таблиця З № п/п 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 ЗО 31 32 33 Номер зв'язку 78 84 90 79 85 91 80 86 92 81 87 93 82 88 94 83 89 95 96 97 98 99 100 12 13 15 17 14 16 76 77 — 33 Позначення зв'язку Yo Yi Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Yio Yn Y12 Y13 Y-I4 Y15 Yie Y17 Y-I8 Y-I9 Y20 Y21 Y22 X1 x2 Хз X4 x5 x6 x7 X8 x9 X10 Назва сигналу Обнуління ЛІЧИЛЬНИКІВ 101, ,106, 119, 120 Запис в лічильник 101 Запис в лічильники 103, 105 Запис в лічильники 104, 106 Підсумування в лічильнику 103 Віднімання в лічильнику 103 Підсумування в лічильнику 104 Віднімання в лічильнику 104 Віднімання в лічильнику 101 Запис в лічильник 102 Підсумування в лічильнику 105 Віднімання в лічильнику 105 Підсумування в лічильнику 106 Віднімання в лічильнику 106 Запис вОПЗ 108, 109 Віднімання в лічильнику 102 Обнуління ЛІЧИЛЬНИКІВ 105, 106 Зчитування з ОПЗ 108, 109 Встановлення в " 1 " тригера 127, 128 Встановлення в " 1 " тригера 69 Запис в тригери 127, 128 Запис в лічильники 119, 120 та регістри 121, 122 Запис в тригери 129, 130 Ознака наявності комплекту масок 45і, ,45п Ознака наявності комплекту масок в 45і 45п Ознака рівності статичних моментів відносно оси Y Ознака рівності статичних моментів відносно оси Xі Знак співвідношення статичних моментів відносно оси Y* Знак співвідношення статичних моментів відносно оси Xі Ознака нульового вмісту лічильника 101 Ознака нульового вмісту лічильника 102 Ознака нульового стану тригера 69 Ознака наявності несиметричності зображення Вміст ППЗ 60 для випадку примусової адресації наведений в табл 5, де ЛОГІЧНІ сигнали Х-і, , Х-іо, закодовані таким чином Хі - 0001, Х2 - 0010, Хз - 0011, - 0100, Х5 0101, Х6 - 0110, Х7 - 0111, Х8 - 1000, Х9 -1001, Хю 1010, відсутність умов 0000 Функціональні вузли, наведені на фіг 5, можуть бути реалізовані на таких мікросхемах програмований ППЗ 60 К155РЕЗ, регістр 61 - К555 ИР23, дешифратори 62, , 66 - К155ИДЗ, тригер 68 -К155 ТМ2 Пристрій 58 фіксації зміщень (ПФЗ) (див фіг 6) працює таким чином Лічильник 101 с лічильником числа комплектів масок, в який початково записується число К комплектів масок, що використовуються пристроєм Вміст лічильника 101 використовується для організації циклу зміни і-го комплекту тіньових бінарних масок 45і , , 45П Тому k - розрядна адреса маски, де k = Iog2 К, з виходу 23 блоку управління 11 надходить на входи блоків 7 та 8 заміни комплектів масок, з також на інформаційні входи дешифратора 107 для вибору ВІДПОВІДНОГО кристалу ОПЗ 108, 109, в сигнал Хі з виходу " Є 49 52678 ФІГ. 6 50 51 52678 W Фіг. 7 52 53 54 52678 Зображення з центральною симетрією Зображенні та ознаки класу та ознаки підкласу Інваріантність озпэдн ДО Загальна ознака масу: Загальна ознака підкласу; Лі Ш^ АП П І h . "И Д І Г • Лі Р І К Г П ' Л І ф у, ~уг=.„=у^у^=...= у^ Зображення; Ознаки1 числи пар ортогоиііьішх осей. - пара ортогональних осей. ~r Z 3 -' гарне число пар осей. L і - непарне лиедп wt Г t / Фіг. 8 (p - число пар ортогональних осей х ну) 55 56 52678 Зображення з осьовою симетрією Зображення та признак к підкласу ознака класу: h симетрії X а.) зображеній ч вісси Інваріантність ознаки до повороту Загальна ознака підкласу: L і) зображеняд J віссю симетрії X *, ^ хг й..А Xj Ф x^} Ф...Ф xx, - • • • = » б) тображеюм Ї тесло симетрії У = х г У П =••-= 3 сшяе-Lpii X й Y' . -одна конкретна вісь симетрії X'. конкретна вісь снметрл Y1 декілька octti симетрії X*. декільга осей симетрГі Yh її - 2k + 1 Фіг. 9 57 52678 Фіг. 10 58 59 52678 60 9 Y77Z< ^ Z J 777, Фіг. 11
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining symmetry of an object image
Автори англійськоюBuda Antonina Heroniivna, Martyniuk Tetiana Borysivna, Kozhemiako Andrii Viktorovych
Назва патенту російськоюУстройство для определения симметричности изображения объекта
Автори російськоюБуда Антонина Героньевна, Мартынюк Татьяна Борисовна, Кожемьяко Андрей Викторович
МПК / Мітки
МПК: G06K 11/00, G06K 9/00, G06K 9/52, G06K 9/58
Мітки: зображень, об'єктів, розпізнавання, пристрій, симетричності
Код посилання
<a href="https://ua.patents.su/32-52678-pristrijj-dlya-rozpiznavannya-simetrichnosti-zobrazhen-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для розпізнавання симетричності зображень об’єктів</a>
Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Мартинюк Тетяна Борисівна, Кожем'яко Володимир Прокопович, Буда Антоніна Георгіївна, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ
МПК: G06K 11/00, G06K 9/52, G06K 9/58
Мітки: зображень, спосіб, розпізнавання, симетричності, об'єктів, реалізації, пристрій
Формула / Реферат:
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой...
Пристрій для селекції ознак зображень об’єктів
Номер патенту: 34356
Опубліковано: 15.02.2001
Автори: Нусейбах Муханнад Асем, Гороховський Олександр Іванович, Мошкович Людмила Олександрівна
МПК: G06F 15/76, G06K 9/36
Мітки: пристрій, селекції, зображень, ознак, об'єктів
Текст:
...коду здійснюється з комірки за адресою, сформованою лічильниками 11, 12 і регі стром 3, при надходженні сигналу з виходу третього елементу І (8). На входи 24 і 25 послідовно подаються сигнали від елементів зображення двох сусідніх рядків, що проходять через тригери регістру 1 для першого рядка і тригери регістру 2 для другого рядка. При закінченні будь-якої ознаки хоча б один із тригерів 16, 19 буде знаходиться в одиничному стані, а...
Пристрій для ділення або множення n-розрядних чисел
Номер патенту: 35015
Опубліковано: 15.03.2001
Автори: Лега Юрій Григорійович, Лукашенко Валентина Максимівна, Шеховцов Борис Анатолійович, Лукашенко Андрій Германович
МПК: G06F 7/52, G06F 7/527
Мітки: пристрій, n-розрядних, множення, чисел, ділення
Формула / Реферат:
Пристрій для ділення або множення n-розрядних чисел, що вміщує n-розрядні регістри співмножників. виходи регістрів співмножників згрунтовані по к-розрядів (к - розрядність множника і множеного; (к<n) і підключені до інформаційних входів комутаторів груп розрядів множника і множеного відповідно, керуючі входи якого підключені відповідно до першого та другого керуючих входів пристрою керування, а виходи підключені відповідно до входів...
Перетворювач фаза-код
Номер патенту: 18766
Опубліковано: 25.12.1997
Автори: Отенко Віктор Іванович, Юриш Сергій Юрійович, Дудикевич Валерій Богданович, Суп'ян Веніамін Яковлевич, Максимович Володимир Миколайович, Горбатюк Станислав Миколайович
МПК: G01R 25/00
Мітки: фаза-код, перетворювач
Формула / Реферат:
Перетворювач фаза-код, що містить два вхідні формувачі, генератор тактових імпульсів, блок керування, схему віднімання, два лічильники, два комбінаційних елементи І-АБО, керуючі входи першого комбінаційного елемента І-АБО підключені до розрядів першого лічильника, сигнальні до розрядів другого лічильника, керуючі входи другого комбінаційного елемента І-АБО підключені до розрядів другого лічильника, Сигнальні - до розрядів першого лічильника,...
Пристрій для множення
Номер патенту: 37026
Опубліковано: 16.04.2001
Автори: Білан Степан Миколайович, Кіров Максим Володимирович
МПК: G06G 7/16
Текст:
...схеми керування, другий вихід котрої підключений до другого керуючого входу першого суматора та до другого керуючого входу др угого суматора, а третій вихід схеми керу вання підключений до першого керуючого входу першого суматора та до першого керуючого входу другого суматора, а інформаційній вихід лічильника підключений до першого та другого інформаційного входів першого суматора та до першого та другого інформаційних входів др угого...
Попередній патент: Спосіб виготовлення будівельного блока з оголеним кам’яним набризком
Наступний патент: Фармацевтична композиція, що містить велику кількість одиниць трамадолу, і спосіб її приготування
Випадковий патент: Увідна роликова коробка (її варіанти)