Зубчато – важільний планетарний механізм
Номер патенту: 47582
Опубліковано: 15.07.2002
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович
Формула / Реферат
Зубчато-важільний планетарний механізм, який містить два зубчатих колеса, з яких одне жорстко з'єднане з кривошипом, який відрізняється тим, що друге зубчате колесо шарнірно з'єднане з іншим кривошипом та важелем, який шарнірно з'єднаний з робочим органом, причому кривошипи виконані з однаковою довжиною плеч та можливістю отримання руху одного напрямку і величини, встановлені в одній площині під однаковим кутом, причому зубчаті колеса виконані з можливістю зміни радіусів початкових кіл, а з'єднання важеля з зубчатим колесом виконане з можливістю розташування в будь-якій точці торцевої поверхні зубчатого колеса.
Текст
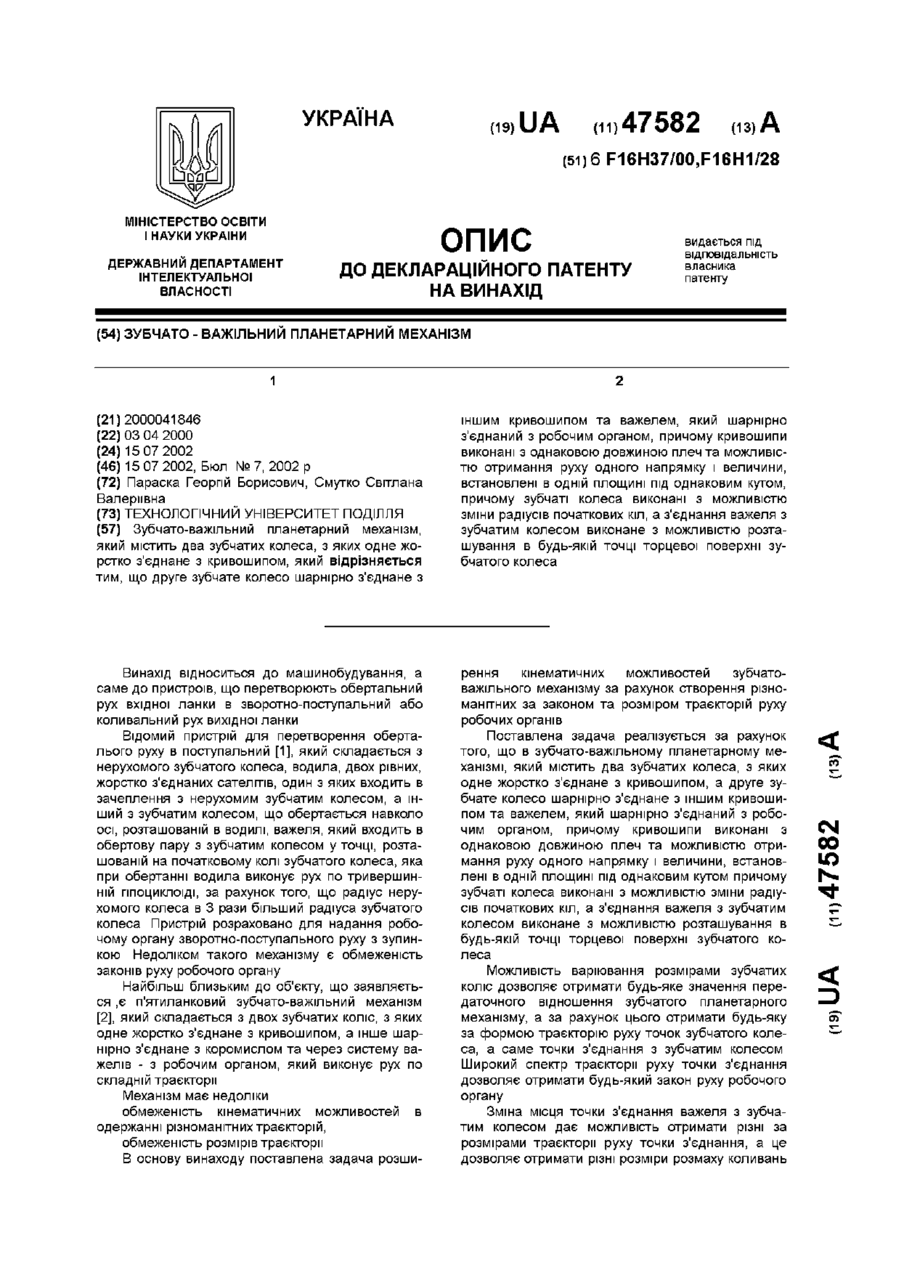
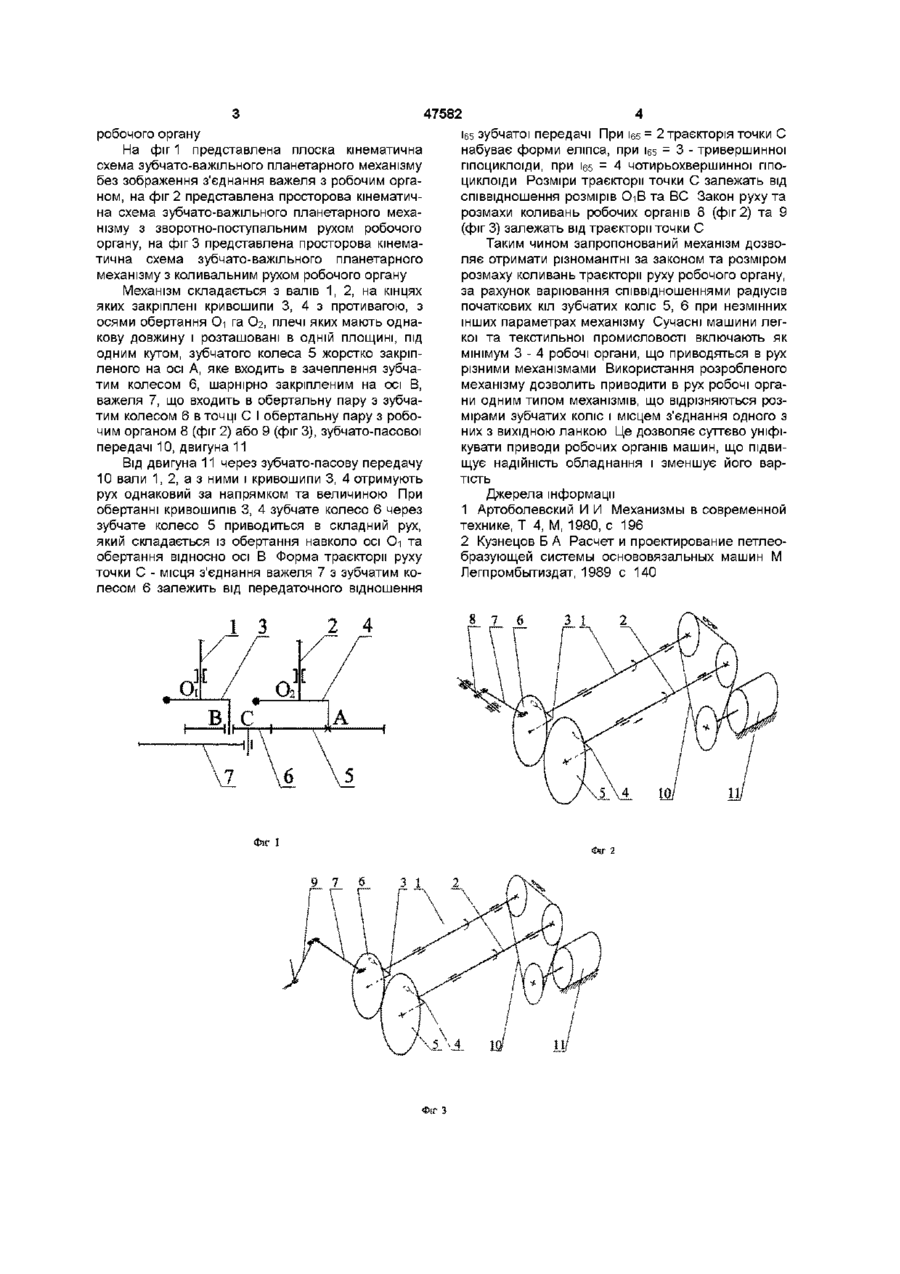
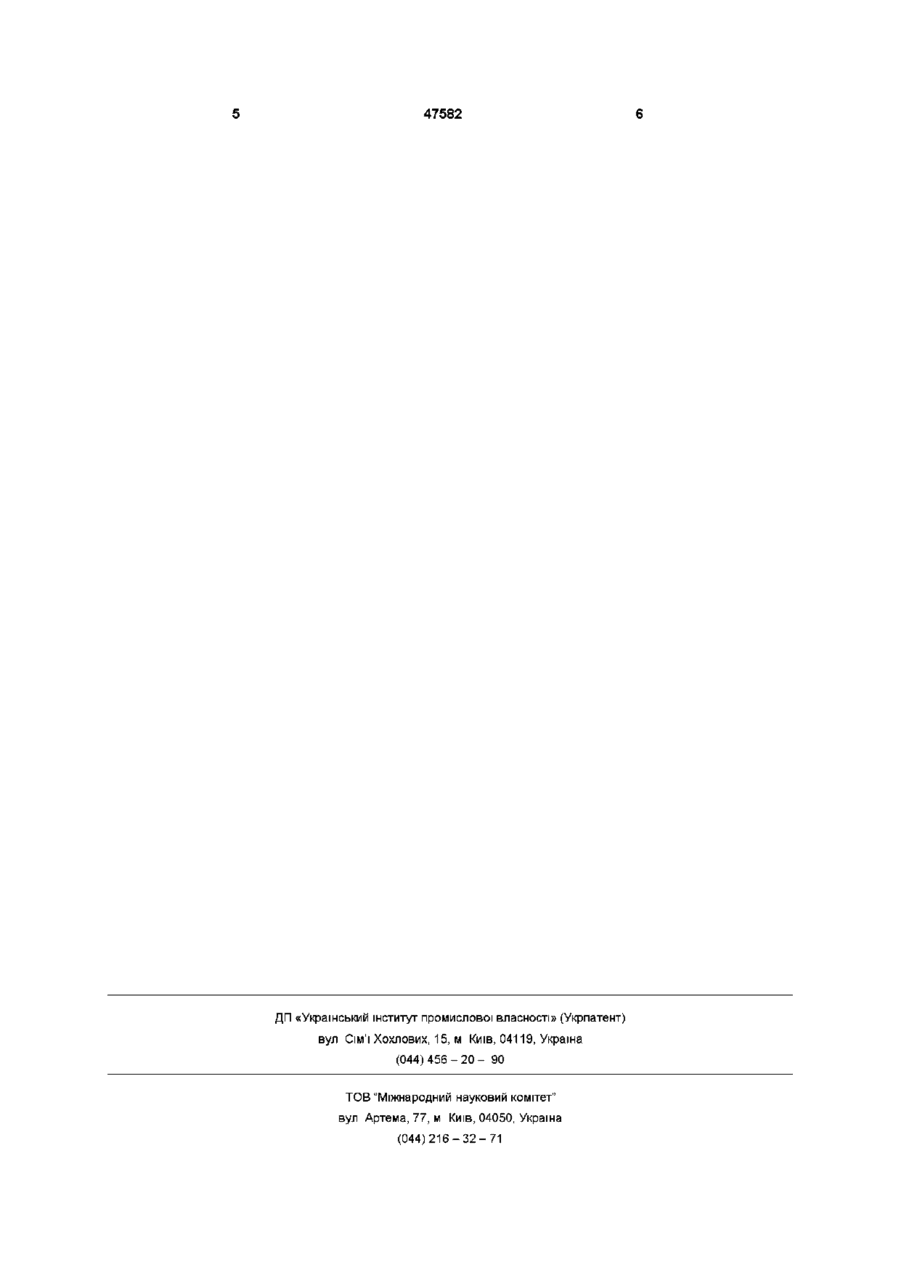
Зубчато-важільний планетарний механізм, який містить два зубчатих колеса, з яких одне жорстко з'єднане з кривошипом, який відрізняється тим, що друге зубчате колесо шарнірно з'єднане з Винахід відноситься до машинобудування, а саме до пристроїв, що перетворюють обертальний рух вхідної ланки в зворотно-поступальний або коливальний рух вихідної ланки Відомий пристрій для перетворення оберталього руху в поступальний [1], який складається з нерухомого зубчатого колеса, водила, двох рівних, жорстко з'єднаних сателітів, один з яких входить в зачеплення з нерухомим зубчатим колесом, а інший з зубчатим колесом, що обертається навколо осі, розташованій в водилі, важеля, який входить в обертову пару з зубчатим колесом у точці, розташованій на початковому колі зубчатого колеса, яка при обертанні водила виконує рух по тривершинній гіпоциклоїді, за рахунок того, що радіус нерухомого колеса в 3 рази більший радіуса зубчатого колеса Пристрій розраховано для надання робочому органу зворотно-поступального руху з зупинкою Недоліком такого механізму є обмеженість законів руху робочого органу Найбільш близьким до об'єкту, що заявляється ,є п'ятиланковий зубчато-важільний механізм [2], який складається з двох зубчатих коліс, з яких одне жорстко з'єднане з кривошипом, а інше шарнірно з'єднане з коромислом та через систему важелів - з робочим органом, який виконує рух по складній траєкторії Механізм має недоліки обмеженість кінематичних можливостей в одержанні різноманітних траєкторій, обмеженість розмірів траєкторії В основу винаходу поставлена задача розши іншим кривошипом та важелем, який шарнірно з'єднаний з робочим органом, причому кривошипи виконані з однаковою довжиною плеч та можливістю отримання руху одного напрямку і величини, встановлені в одній площині під однаковим кутом, причому зубчаті колеса виконані з можливістю зміни радіусів початкових кіл, а з'єднання важеля з зубчатим колесом виконане з можливістю розташування в будь-якій точці торцевої поверхні зубчатого колеса рення кінематичних можливостей зубчатоважільного механізму за рахунок створення різноманітних за законом та розміром траєкторій руху робочих органів Поставлена задача реалізується за рахунок того, що в зубчато-важільному планетарному механізмі, який містить два зубчатих колеса, з яких одне жорстко з'єднане з кривошипом, а друге зубчате колесо шарнірно з'єднане з іншим кривошипом та важелем, який шарнірно з'єднаний з робочим органом, причому кривошипи виконані з однаковою довжиною плеч та можливістю отримання руху одного напрямку і величини, встановлені в одній площині під однаковим кутом причому зубчаті колеса виконані з можливістю зміни радіусів початкових кіл, а з'єднання важеля з зубчатим колесом виконане з можливістю розташування в будь-якій точці торцевої поверхні зубчатого колеса Можливість варіювання розмірами зубчатих коліс дозволяє отримати будь-яке значення передаточного відношення зубчатого планетарного механізму, а за рахунок цього отримати будь-яку за формою траєкторію руху точок зубчатого колеса, а саме точки з'єднання з зубчатим колесом Широкий спектр траєкторії руху точки з'єднання дозволяє отримати будь-який закон руху робочого органу Зміна місця точки з'єднання важеля з зубчатим колесом дає можливість отримати різні за розмірами траєкторії руху точки з'єднання, а це дозволяє отримати різні розміри розмаху коливань 00 ю 47582 робочого органу На фіг 1 представлена плоска кінематична схема зубчато-важільного планетарного механізму без зображення з'єднання важеля з робочим органом, на фіг 2 представлена просторова кінематична схема зубчато-важільного планетарного механізму з зворотно-поступальним рухом робочого органу, на фіг 3 представлена просторова кінематична схема зубчато-важільного планетарного механізму з коливальним рухом робочого органу Механізм складається з валів 1, 2, на кінцях яких закріплені кривошипи 3, 4 з противагою, з осями обертання d га Ог, плечі яких мають однакову довжину і розташовані в одній площині, під одним кутом, зубчатого колеса 5 жорстко закріпленого на осі А, яке входить в зачеплення зубчатим колесом 6, шарнірно закріпленим на осі В, важеля 7, що входить в обертальну пару з зубчатим колесом 6 в точці С І обертальну пару з робочим органом 8 (фіг 2) або 9 (фіг 3), зубчато-пасової передачі 10, двигуна 11 Від двигуна 11 через зубчато-пасову передачу 10 вали 1, 2, а з ними і кривошипи 3, 4 отримують рух однаковий за напрямком та величиною При обертанні кривошипів 3, 4 зубчате колесо 6 через зубчате колесо 5 приводиться в складний рух, який складається із обертання навколо осі d та обертання відносно осі В Форма траєкторії руху точки С - місця з'єднання важеля 7 з зубчатим колесом 6 залежить від передаточного відношення І65 зубчатої передачі При іб5 - 2 траєкторія точки С набуває форми еліпса, при І65 — 3 - тривершинної гіпоциклоїди, при І65 - 4 чотирьохвершинної гіпоциклоїди Розміри траєкторії точки С залежать від співвідношення розмірів ОіВта ВС Закон руху та розмахи коливань робочих органів 8 (фіг 2) та 9 (фіг 3) залежать від траєкторії точки С Таким чином запропонований механізм дозволяє отримати різноманітні за законом та розміром розмаху коливань траєкторії руху робочого органу, за рахунок варіювання співвідношеннями радіусів початкових кіл зубчатих коліс 5, 6 при незмінних інших параметрах механізму Сучасні машини легкої та текстильної промисловості включають як мінімум 3 - 4 робочі органи, що приводяться в рух різними механізмами Використання розробленого механізму дозволить приводити в рух робочі органи одним типом механізмів, що відрізняються розмірами зубчатих коліс і місцем з'єднання одного з них з вихідною ланкою Це дозволяє суттєво уніфікувати приводи робочих органів машин, що підвищує надійність обладнання і зменшує його вартість Джерела інформації 1 Артоболевский И И Механизмы в современной технике, Т 4, М, 1980, с 196 2 Кузнецов Б А Расчет и проектирование петлеобразующей системы основовязальных машин М Легпромбытиздат, 1989 с 140 ФІГ 9 7 IV ФІГ З 2 47582 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюGear-lever planetary mechanism
Автори англійськоюParaska Georgii Borysovych, Smutko Svitlana Valeriivna
Назва патенту російськоюЗубчато-рычажный планетарный механизм
Автори російськоюПараска Георгий Борисович, Смутко Светлана Валерьевна
МПК / Мітки
МПК: F16H 1/28, F16H 37/00
Мітки: механізм, зубчато, планетарний, важільний
Код посилання
<a href="https://ua.patents.su/3-47582-zubchato-vazhilnijj-planetarnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Зубчато – важільний планетарний механізм</a>
Зубчато-важільний планетарний механізм
Номер патенту: 30308
Опубліковано: 15.11.2000
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович
МПК: F16H 37/00, F16H 1/28
Мітки: зубчато-важільний, механізм, планетарний
Формула / Реферат:
Зубчатоважільний планетарний механізм, який містить нерухоме зубчате колесо, водило, два жорстко з'єднаних сателіти, встановлених на водилі, зубчате колесо з віссю обертання, розташованою в водилі, важіль, з'єднаний з зубчатим колесом, який відрізняється тим, що сателіти виконані з різними радіусами початкових кіл, зубчате колесо виконано з можливістю зміни радіуса початкового кола та зміни місця осі обертання відносно осі обертання водила, а...
Зубчато-важільний планетарний кривошинно-повзунний механізм
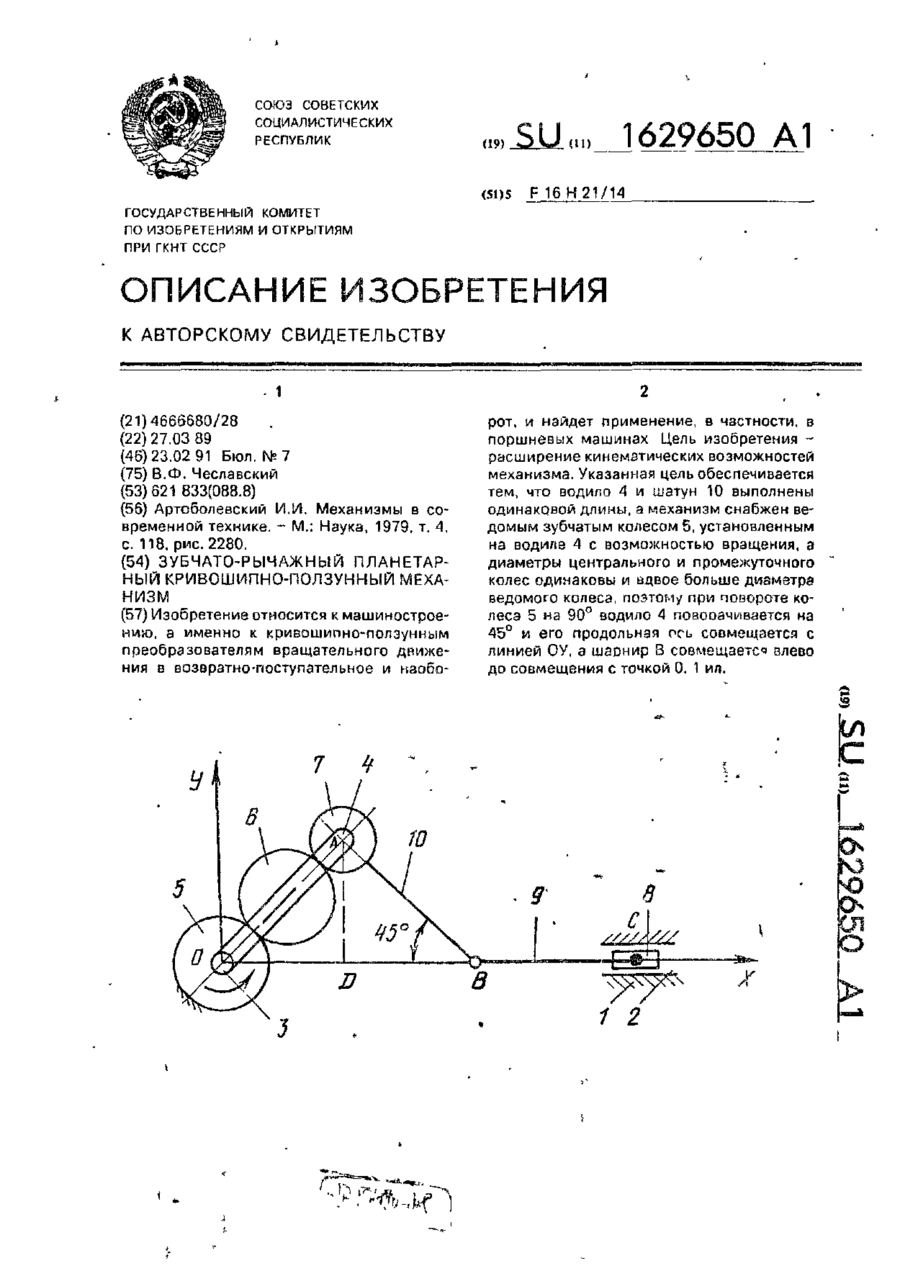
Номер патенту: 6139
Опубліковано: 29.12.1994
Автор: Чеславський Володимир Федірович
МПК: F16H 21/14
Мітки: кривошинно-повзунний, зубчато-важільний, планетарний, механізм
Формула / Реферат:
Зубчато-рычажный планетарный кривошипно-ползунный механизм, содержащий основание с прямолинейной направляющей, ведущий вал с жестко закрепленным на ней водилом, ось вращения которого пересечена с продольной осью направляющей, закрепленное на основании зубчатое колесо, ось которого совмещена с осью вращения ведущего вала, установленное на водило с возможностью вращения промежуточное зубчатое колесо, входящее в зацепление с центральным...
Зубчато-роликова передача

Номер патенту: 20128
Опубліковано: 25.12.1997
Автор: Лисенко Леонід Власович
МПК: F16H 1/24
Мітки: передача, зубчато-роликова
Формула / Реферат:
Зубчато-роликова передача, яка складається з шестерні в півциліндричних впадинах якої жорстко закріплені зуби - ролики з кроком не більшим 0,05 діаметра шестерні, з нею знаходиться в зачепленні зубчате колесо з півциліндричними впадинами, і відрізняється тим, що півциліндричні впадини в шестерні і зубчатому колесі мають радіус і глибину рівну радіусу зубів-роликів, зовнішня поверхня виступів зубів-роликів концентрична циліндричній поверхні...
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: механізм, зупинками, шарнірно-важільний
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Кулачково-важільний механізм
Номер патенту: 42005
Опубліковано: 15.10.2001
Автор: Ключковський Сергій Миронович
МПК: F16H 25/00
Мітки: механізм, кулачково-важільний
Формула / Реферат:
Кулачково-важільний механізм, який містить встановлений на валу пазовий кулачок, коромисловий штовхач з роликом, виконаний у вигляді двоплечого важеля, який шарнірно з'єднаний за допомогою шатуна з коромислом і утворює з ними шарнірний чотириланковик, вхідною ланкою якого є штовхач, а вихідною - коромисло, при цьому в позиціях вистою коромисла в обох крайніх положеннях шатун і плече коромислового штовхача, з'єднане з шатуном, розміщені на...
Попередній патент: Засіб захисту тварин для профілактики і лікування післяпологових ендометритів “антисепт фд”
Наступний патент: Індукційний термомагнітний перетворювач струму
Випадковий патент: Спосіб лікування і профілактики спайкової хвороби очеревини