Спосіб розпізнавання геометричних об`єктів
Номер патенту: 48287
Опубліковано: 10.03.2010
Автори: Ульшин Віталій Олександрович, Лехціер Леонід Романович, Лехціер Олег Леонідович

Формула / Реферат
1. Спосіб розпізнавання геометричних об'єктів, у якому на розпізнаваному об'єкті визначають проекції характерних частин об'єкта і формують матрицю проекцій розпізнаваного об'єкта, після чого сформовану матрицю проекцій розпізнаваного об'єкта порівнюють з матрицею проекцій еталонного об'єкта і ідентифікують розпізнаваний геометричний об'єкт за критерієм близькості, який відрізняється тим, що критерій близькості формують як ряд проекцій на нерухому вісь об'єкта, який розпізнається, причому ці проекції утворюють при послідовному розрахунковому повороті розпізнаваного та еталонного об'єктів на підсумковий кут 360 градусів.
2. Спосіб за п. 1, який відрізняється тим, що при пошуку найбільшого критерію близькості при порівнянні низки проекцій еталонного та розпізнаваного об'єктів здійснюють розрахунковий зсув низки одержаних проекцій розпізнаваного об'єкта відносно низки проекцій еталонного об'єкта.
Текст
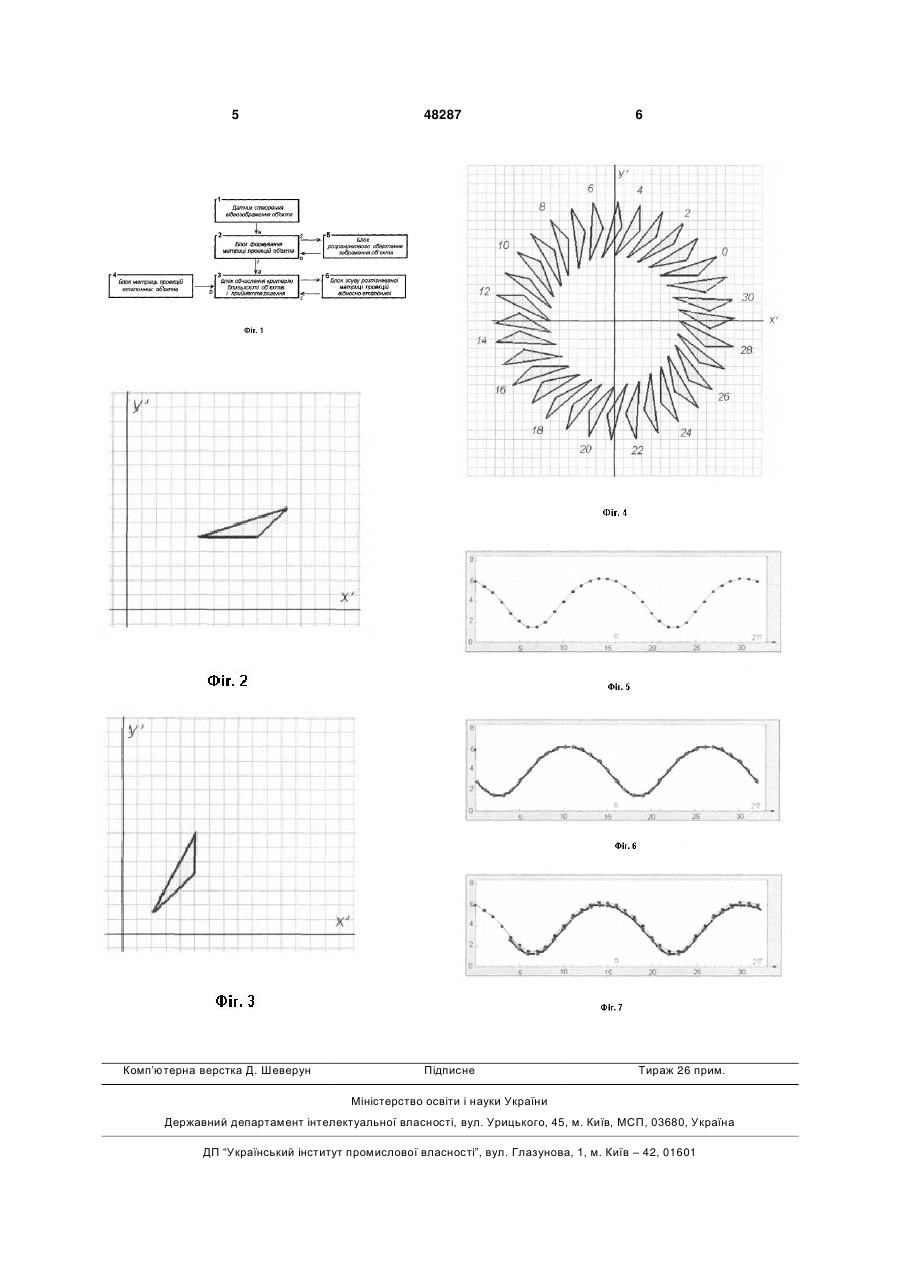
1. Спосіб розпізнавання геометричних об'єктів, у якому на розпізнаваному об'єкті визначають проекції характерних частин об'єкта і формують матрицю проекцій розпізнаваного об'єкта, після чого сформовану матрицю проекцій розпізнаваного об'єкта порівнюють з матрицею проекцій еталон 3 відносно низки проекцій еталонного об'єкту, що приведе до надійного розпізнавання геометричного об'єкту не залежно від його положення в координатній сітці і від кута його нахилу до еталонного об'єкту. Сутність корисної моделі пояснюється ілюстративним матеріалом, де на фіг. 1 зображена функціональна схема пристрою для здійснення способу розпізнавання геометричних об'єктів, на фіг. 2 – еталонний об'єкт в координатній сітці, на фіг. 3 - даний об'єкт в координатній сітці, на фіг. 4 - 32 розрахункових кроки повороту об'єкта, що розпізнається, на фіг. 5 - графічний вигляд матриці проекцій еталонного об'єкта, на фіг. 6 - графічний вигляд матриці проекцій даного об'єкта, на фіг. 7 взаємне розташування матриць проекцій еталонного та даного об'єктів після чотирьох розрахункових кроків зсуву матриці даного об'єкта. Пристрій для здійснення способу розпізнаваний геометричних об'єктів містить датчик 1 створення відеозображення об'єкта, блок 2 формування матриці проекцій об'єкта, блок і обчислення критерію близькості об’єктів і прийняття рішення, блок 4 матриць проекцій еталонних об'єктів, блок 5 розрахункового обертання зображення об'єкта та блок 6 зсуву розпізнаваної матриці проекцій відносно еталонної. Вхід і вихід блоку 5 розрахункового обертання зображення об'єкта з'єднано відповідно з другим виходом і другим входом блоку 2 формування матриці проекцій об'єкта, а вхід і вихід блоку 6 зсуву розпізнаваної матриці проекцій відносно еталонної з'єднано відповідно з виходом і третім входом блоку 3 обчислення критерію близькості об'єктів і прийняття рішення (фіг. 1).. Спосіб розпізнавання геометричних об'єктів здійснюється наступним чином. З виходу датчика 1 створення відеозображення об'єкта сигнал з інформацією про геометричний об'єкт надсилають до входу а блока 2 формування матриці проекцій об'єкта. У блоці 2 за допомогою блока 5 реалізують послідовні розрахункові повороти системи координат разом з даним об'єктом на підсумковий кут 360 градусів, формують матрицю проекцій об'єкту, що розпізнається. Сформовану матрицю проекцій об'єкта з виходу блоку 2 надсилають на вхід а блока 3 обчислення критерію близькості об'єктів і прийняття рішення. Числові дані про матрицю проекцій еталонного об'єкту надсилають з виходу блоку 4 еталонних матриць проекцій до входу б блока 3. Матриці проекцій еталонних об'єктів одержують розрахунковим шляхом і заздалегідь розміщують у блоці 4. Розрахунковими порівняннями одержаної в блоці 2 матриці проекцій з еталонною матрицею розпізнаваного об'єкту, надісланого з виходу блока 4, формують в блоці 3 рішення щодо ідентичності еталонного та розпізнаваного об'єктів. Якщо ідентичність матриць проекцій еталонного та розпізнаваного об'єктів не зафіксована, то з виходу блока 3 на вхід блока 6 подають команду, яка ініціює послідовний розрахунковий зсув елементів матриці проекцій розпізнаваного об'єкту відносно елементів матриці проекцій еталонного об'єкту. При кожному кроці зсуву в блоці 3 обчислюють критерій близькості. Сигнал, пропорційний одержаній в блоці 3 інформації ви 48287 4 користовують для прийняття рішення відносно ідентичності еталонного і розпізнаваного об'єктів. Процес розпізнавання геометричних об'єктів пояснюється на прикладі ідентифікації фігури, що має форму трикутника. Як еталон прийнято трикутник, зображений на фіг. 2, а з виходу датчика 1 створення відеозображення объекта надсилають сигнал, що несе інформацію про об'єкт, зображений на фіг. 3. Обидва трикутники, розпізнавана фігура і еталон, не сполучені в координатній сітці і відрізняються кутом нахилу до координатних вісей. На фіг. 4 наведено процес одержання розрахунковим шляхом еталонної матриці проекцій трикутника, яку заздалегідь розміщують у блоці 4. Цю матрицю створюють шляхом послідовного розрахункового повороту системи координат, при якому за декілька кроків змін кута нахилу (в даному прикладі за 32 кроки) зображення объекту відносно нерухомої координатної вісі змінюють на 360 градусів. Для кожного з 32 розрахункових кроків повороту, графічні зображення яких представлені на фіг. 4, визначають величину проекції трикутника на нерухому вісь X. Величина кожної з цих проекцій є одним з елементів еталонної матриці проекцій. Одержана таким чином еталонна матриця проекцій графічно має вигляд функції, яку показано на фіг. 5. Числові дані про матрицю проекцій еталонного об’єкту надсилають з виходу блоку 4 матриць проекцій еталонних об'єктів до входу б блока 3. Аналогічним чином створюють матрицю проекцій для трикутника, який розпізнається. Графічне зображення цієї матриці проекцій наведено на фіг. 6. Після визначення матриць проекцій для еталонного та розпізнаваного трикутників у блоці 3 здійснюють порівняння обох матриць проекцій. При порівнянні двох матриць проекцій виявляють, що критерій близькості цих двох об'єктів дуже малий, оскільки кути нахилу еталонного та розпізнаваного трикутників різні. Тому проводять перевірку рівня цих двох матриць проекцій при інших можливих кутах нахилу трикутника до нерухомої осі. Під час цієї перевірки здійснюють послідовний розрахунковий зсув елементів матриці проекцій розпізнаваного об’єкта відносно елементів матриці проекцій еталонного об'єкта. При кожному кроці зсуву в блоці 3 обчислюють критерій близькості. В процесі цього зсуву з'ясовують, що через чотири кроки зсуву матриці проекцій розпізнаваного і еталонного об'єктів практично збігаються (фіг. 7). При цьому критерій близькості стає максимальним. Сигнал, пропорційний одержаній у блоці 3 інформації, формує у блоці 3. висновок про ідентичність еталонного та досліджуваного об'єктів. На відміну від відомого способу, досліджувана фігура може займати будь яке положення до еталону і може відрізнятись кутом нахилу, що не обмежує область застосування способу розпізнавання об'єктів на підприємстві. Таким чином, запропонований спосіб, на відміну від прототипу, може бути використано для надійного розпізнавання геометричних об'єктів у автоматичних та роботизованих конвеєрних лініях для класифікації деталей та заготівок. 5 Комп’ютерна верстка Д. Шеверун 48287 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for recognition of geometrical objects
Автори англійськоюLekhtsier Oleh Leonidovych, Lekhtsier Leonid Romanovych, Ulshyn Vitalii Oleksandrovych
Назва патенту російськоюСпособ распознавания геометрических объектов
Автори російськоюЛехциер Олег Леонидович, Лехциер Леонид Романович, Ульшин Виталий Александрович
МПК / Мітки
МПК: G06K 9/00
Мітки: розпізнавання, спосіб, геометричних, об'єктів
Код посилання
<a href="https://ua.patents.su/3-48287-sposib-rozpiznavannya-geometrichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання геометричних об`єктів</a>
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 13591
Опубліковано: 17.04.2006
Автори: Южаков Сергій Васильович, Білан Степан Миколайович
МПК: G06K 9/70
Мітки: плоских, фігур, розпізнавання, спосіб, геометричних
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, визначають функцію площини перетину вхідної фігури та її копії, порівнюють з еталонними значеннями функцію перетину площин і визначають класи фігур для кожного напрямку, який відрізняється тим, що процес порівняння розділяють на швидкий та детальний, обчислюють інтегральні показники за допомогою основних...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 48903
Опубліковано: 15.08.2002
Автори: Южаков Сергій Васильович, Домбровська Наталія Валентинівна, Бендерук Ірина Миколаївна, Білан Степан Миколайович
Мітки: фігур, геометричних, спосіб, плоских, розпізнавання
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та її копії, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копії, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 51190
Опубліковано: 15.11.2002
Автори: Ал Зобі Салім, Білан Степан Миколайович
Мітки: спосіб, розпізнавання, плоских, геометричних, фігур
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра,...
Спосіб розпізнавання групових точкових об`єктів
Номер патенту: 46476
Опубліковано: 25.12.2009
Автор: Дубровкіна Маргарита Василівна
МПК: G06K 9/00
Мітки: розпізнавання, точкових, спосіб, групових, об'єктів
Формула / Реферат:
Спосіб розпізнавання групових точкових об'єктів (ГТО), який відрізняється тим, що базується на визначенні значень та напрямків радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів, які обчислюються за формулами , де ,
Спосіб логічного розпізнавання об’єктів
Номер патенту: 82212
Опубліковано: 25.03.2008
Автор: Білозерський Леонід Анатолійович
МПК: G06K 9/68
Мітки: розпізнавання, логічного, об'єктів, спосіб
Формула / Реферат:
Спосіб логічного розпізнавання об'єктів, що полягає у виборі логічних ознак для заданого складу класів об'єктів, у визначенні логічних ознак невідомого розпізнаваного об'єкта, генерації логічних описів класів, виконанні розпізнавання невідомого об'єкта, який відрізняється тим, що для визначення логічних ознак використовують інформацію фізичних вимірників і їхніх комбінацій, виділяють ni специфічних логічних ознак, властивих кожному і-му...
Попередній патент: Спосіб визначення безпечної глибини виймання вугілля викидонебезпечного вугільного пласта
Наступний патент: Пристрій для розпізнавання геометричних об`єктів
Випадковий патент: Замок піддатливості металевого кріплення із спецпрофілю