Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 13591
Опубліковано: 17.04.2006
Формула / Реферат
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, визначають функцію площини перетину вхідної фігури та її копії, порівнюють з еталонними значеннями функцію перетину площин і визначають класи фігур для кожного напрямку, який відрізняється тим, що процес порівняння розділяють на швидкий та детальний, обчислюють інтегральні показники за допомогою основних параметрів функції площини перетину, на швидкому етапі порівняння інтегральних показників визначають деякий клас фігур А, шляхом порівняння отриманих інтегральних показників з генерованими за формулами або еталонними інтегральними показниками, для однозначної ідентифікації фігури проводять детальне порівняння отриманих функцій площини перетину з еталонними і визначають еталон, який відповідає даному зображенню.
Текст
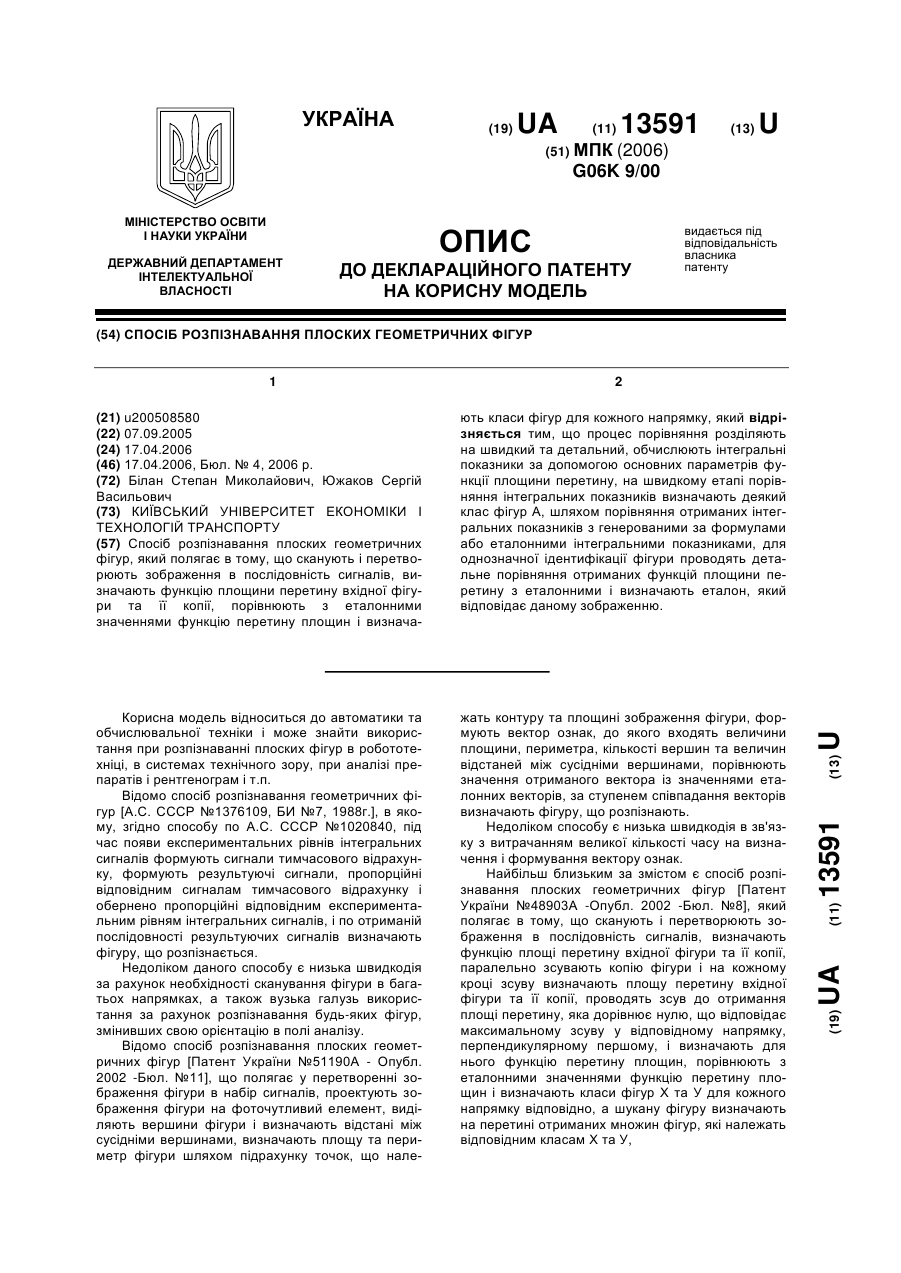
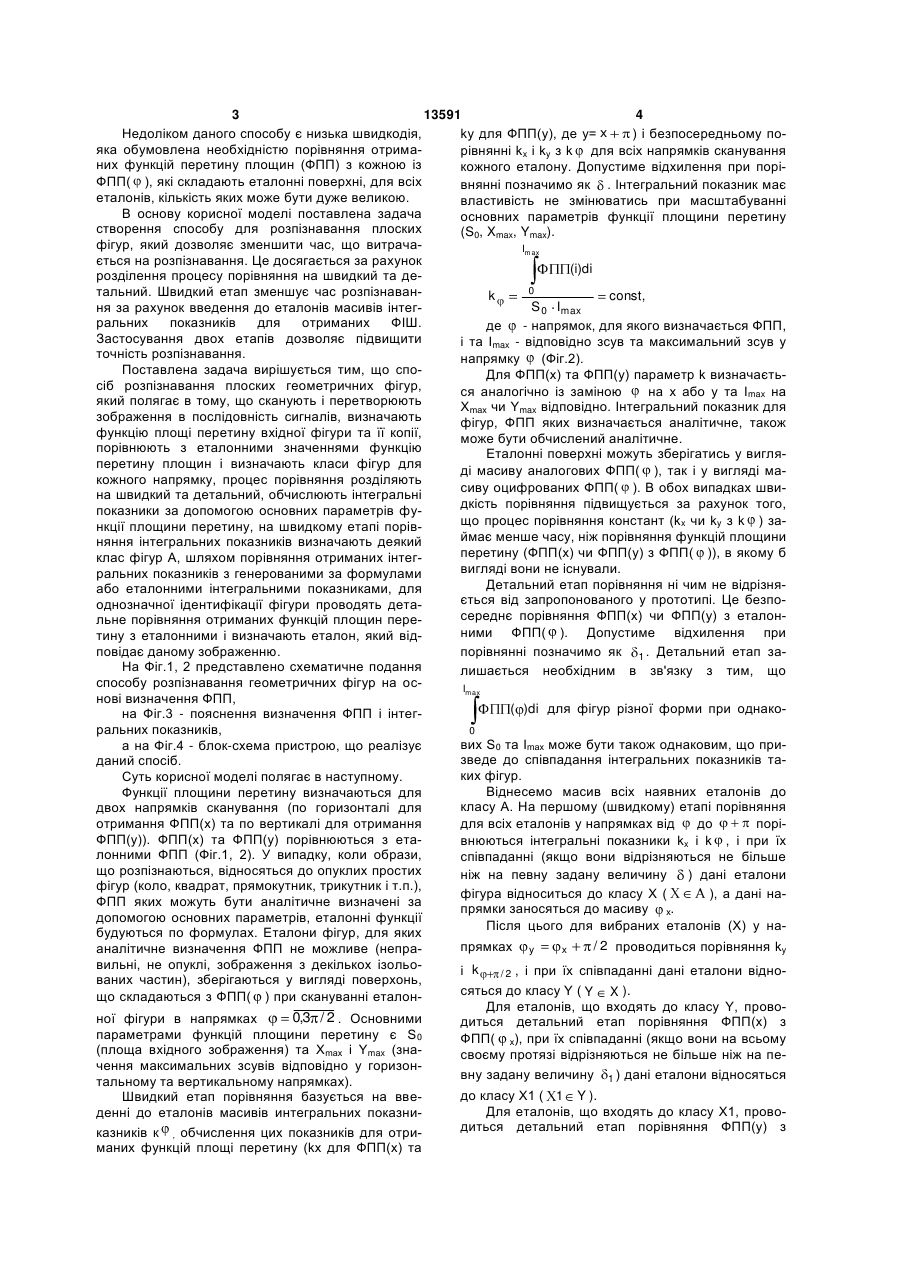
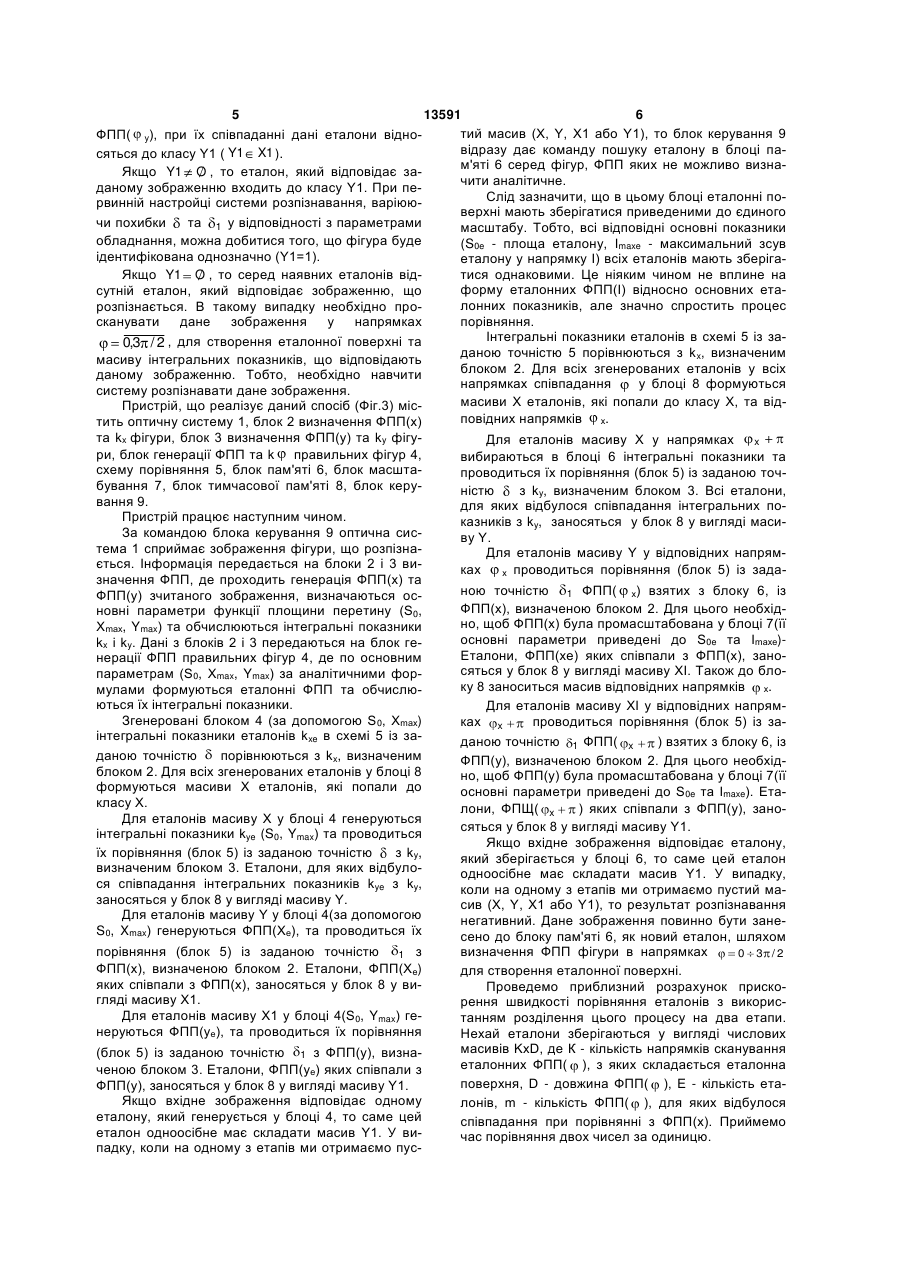
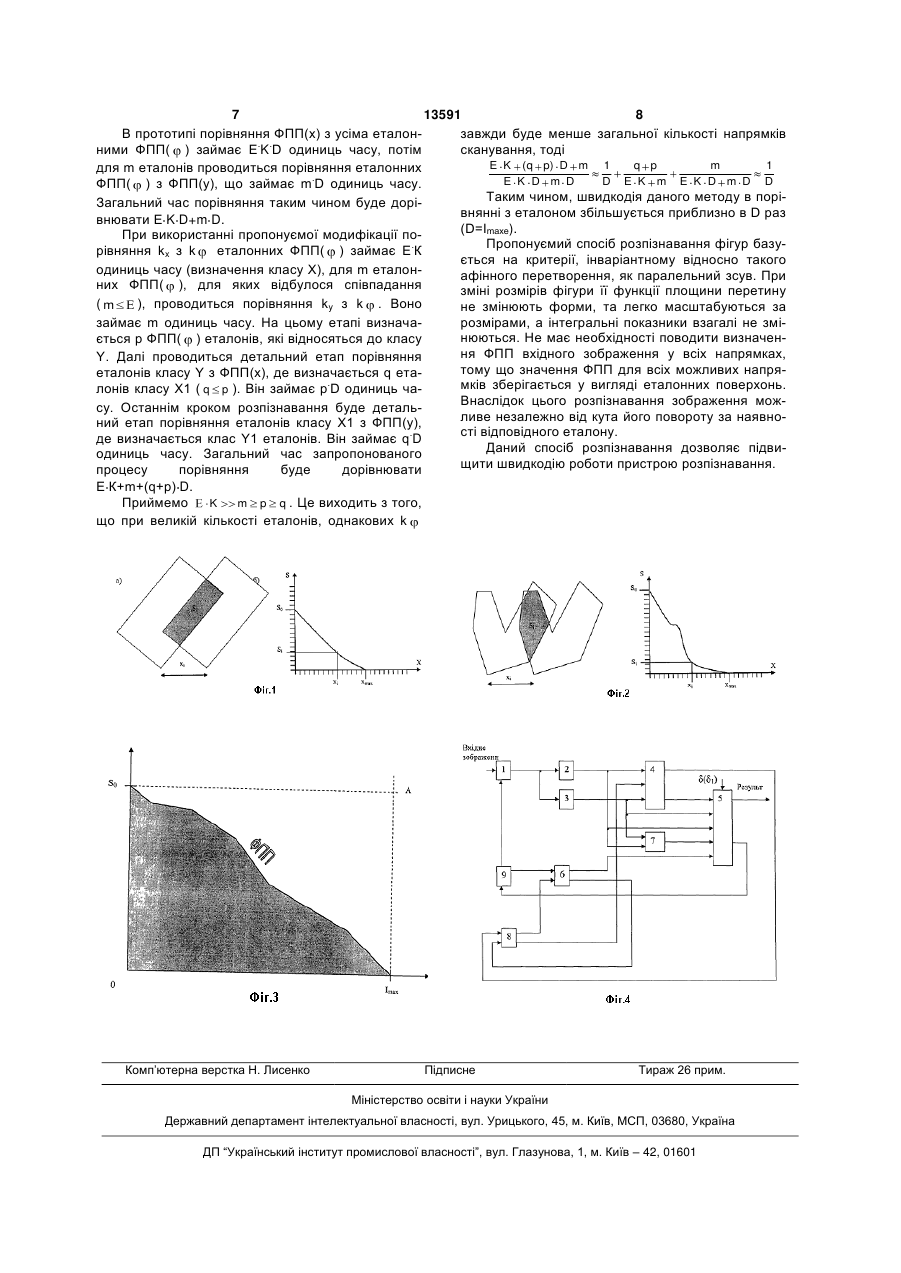
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, визначають функцію площини перетину вхідної фігури та її копії, порівнюють з еталонними значеннями функцію перетину площин і визнача 3 13591 4 Недоліком даного способу є низька швидкодія, ky для ФПП(у), де у= x ) і безпосередньому пояка обумовлена необхідністю порівняння отримарівнянні kx і ky з k для всіх напрямків сканування них функцій перетину площин (ФПП) з кожною із кожного еталону. Допустиме відхилення при поріФПП( ), які складають еталонні поверхні, для всіх внянні позначимо як . Інтегральний показник має еталонів, кількість яких може бути дуже великою. властивість не змінюватись при масштабуванні В основу корисної моделі поставлена задача основних параметрів функції площини перетину створення способу для розпізнавання плоских (S0, Xmax, Ymax). фігур, який дозволяє зменшити час, що витрачаImax ється на розпізнавання. Це досягається за рахунок (i)di розділення процесу порівняння на швидкий та де0 тальний. Швидкий етап зменшує час розпізнаванk const, S 0 Imax ня за рахунок введення до еталонів масивів інтегральних показників для отриманих ФІШ. де - напрямок, для якого визначається ФПП, Застосування двох етапів дозволяє підвищити і та Imax - відповідно зсув та максимальний зсув у точність розпізнавання. напрямку (Фіг.2). Поставлена задача вирішується тим, що споДля ФПП(х) та ФПП(у) параметр k визначаєтьсіб розпізнавання плоских геометричних фігур, ся аналогічно із заміною на х або у та Imax на який полягає в тому, що сканують і перетворюють Хmах чи Ymax відповідно. Інтегральний показник для зображення в послідовність сигналів, визначають фігур, ФПП яких визначається аналітичне, також функцію площі перетину вхідної фігури та її копії, може бути обчислений аналітичне. порівнюють з еталонними значеннями функцію Еталонні поверхні можуть зберігатись у вигляперетину площин і визначають класи фігур для ді масиву аналогових ФПП( ), так і у вигляді макожного напрямку, процес порівняння розділяють сиву оцифрованих ФПП( ). В обох випадках швина швидкий та детальний, обчислюють інтегральні дкість порівняння підвищується за рахунок того, показники за допомогою основних параметрів фущо процес порівняння констант (kx чи ky з k ) занкції площини перетину, на швидкому етапі порівймає менше часу, ніж порівняння функцій площини няння інтегральних показників визначають деякий перетину (ФПП(х) чи ФПП(у) з ФПП( )), в якому б клас фігур А, шляхом порівняння отриманих інтегвигляді вони не існували. ральних показників з генерованими за формулами Детальний етап порівняння ні чим не відрізняабо еталонними інтегральними показниками, для ється від запропонованого у прототипі. Це безпооднозначної ідентифікації фігури проводять детасереднє порівняння ФПП(х) чи ФПП(у) з еталонльне порівняння отриманих функцій площин переними ФПП( ). Допустиме відхилення при тину з еталонними і визначають еталон, який відповідає даному зображенню. порівнянні позначимо як 1 . Детальний етап заНа Фіг.1, 2 представлено схематичне подання лишається необхідним в зв'язку з тим, що способу розпізнавання геометричних фігур на осImax нові визначення ФПП, ( )di для фігур різної форми при однакона Фіг.3 - пояснення визначення ФПП і інтегральних показників, а на Фіг.4 - блок-схема пристрою, що реалізує даний спосіб. Суть корисної моделі полягає в наступному. Функції площини перетину визначаються для двох напрямків сканування (по горизонталі для отримання ФПП(х) та по вертикалі для отримання ФПП(у)). ФПП(х) та ФПП(у) порівнюються з еталонними ФПП (Фіг.1, 2). У випадку, коли образи, що розпізнаються, відносяться до опуклих простих фігур (коло, квадрат, прямокутник, трикутник і т.п.), ФПП яких можуть бути аналітичне визначені за допомогою основних параметрів, еталонні функції будуються по формулах. Еталони фігур, для яких аналітичне визначення ФПП не можливе (неправильні, не опуклі, зображення з декількох ізольованих частин), зберігаються у вигляді поверхонь, що складаються з ФПП( ) при скануванні еталон0,3 / 2 . Основними ної фігури в напрямках параметрами функцій площини перетину є S0 (площа вхідного зображення) та Хmах і Ymax (значення максимальних зсувів відповідно у горизонтальному та вертикальному напрямках). Швидкий етап порівняння базується на введенні до еталонів масивів интегральних показниказників к , обчислення цих показників для отриманих функцій площі перетину (kx для ФПП(х) та 0 вих S0 та Іmах може бути також однаковим, що призведе до співпадання інтегральних показників таких фігур. Віднесемо масив всіх наявних еталонів до класу А. На першому (швидкому) етапі порівняння для всіх еталонів у напрямках від до порівнюються інтегральні показники kx і k , і при їх співпаданні (якщо вони відрізняються не більше ніж на певну задану величину ) дані еталони фігура відноситься до класу Х ( ), а дані напрямки заносяться до масиву х. Після цього для вибраних еталонів (X) у на/ 2 проводиться порівняння ky прямках y x і k / 2 , і при їх співпаданні дані еталони відносяться до класу Y ( Y X ). Для еталонів, що входять до класу Y, проводиться детальний етап порівняння ФПП(х) з ФПП( х), при їх співпаданні (якщо вони на всьому своєму протязі відрізняються не більше ніж на певну задану величину 1 ) дані еталони відносяться до класу X1 ( 1 Y ). Для еталонів, що входять до класу X1, проводиться детальний етап порівняння ФПП(у) з 5 13591 6 тий масив (X, Y, X1 або Y1), то блок керування 9 ФПП( у), при їх співпаданні дані еталони відновідразу дає команду пошуку еталону в блоці пасяться до класу Y1 ( Y1 X1 ). м'яті 6 серед фігур, ФПП яких не можливо визнаЯкщо Y1 O , то еталон, який відповідає зачити аналітичне. даному зображенню входить до класу Y1. При пеСлід зазначити, що в цьому блоці еталонні порвинній настройці системи розпізнавання, варіююверхні мають зберігатися приведеними до єдиного чи похибки та 1 у відповідності з параметрами масштабу. Тобто, всі відповідні основні показники обладнання, можна добитися того, що фігура буде (S0e - площа еталону, Imaxe - максимальний зсув ідентифікована однозначно (Y1=1). еталону у напрямку І) всіх еталонів мають зберігатися однаковими. Це ніяким чином не вплине на Якщо Y1 O , то серед наявних еталонів відформу еталонних ФПП(І) відносно основних етасутній еталон, який відповідає зображенню, що лонних показників, але значно спростить процес розпізнається. В такому випадку необхідно пропорівняння. сканувати дане зображення у напрямках Інтегральні показники еталонів в схемі 5 із за0,3 / 2 , для створення еталонної поверхні та даною точністю 5 порівнюються з kx, визначеним масиву інтегральних показників, що відповідають блоком 2. Для всіх згенерованих еталонів у всіх даному зображенню. Тобто, необхідно навчити напрямках співпадання у блоці 8 формуються систему розпізнавати дане зображення. масиви Х еталонів, які попали до класу X, та відПристрій, що реалізує даний спосіб (Фіг.3) місповідних напрямків х. тить оптичну систему 1, блок 2 визначення ФПП(х) та kx фігури, блок 3 визначення ФПП(у) та ky фігуДля еталонів масиву X у напрямках x ри, блок генерації ФПП та k правильних фігур 4, вибираються в блоці 6 інтегральні показники та схему порівняння 5, блок пам'яті 6, блок масштапроводиться їх порівняння (блок 5) із заданою точбування 7, блок тимчасової пам'яті 8, блок керуністю з ky, визначеним блоком 3. Всі еталони, вання 9. для яких відбулося співпадання інтегральних поПристрій працює наступним чином. казників з ky, заносяться у блок 8 у вигляді масиЗа командою блока керування 9 оптична сисву Y. тема 1 сприймає зображення фігури, що розпізнаДля еталонів масиву Y у відповідних напрямється. Інформація передається на блоки 2 і 3 виках х проводиться порівняння (блок 5) із задазначення ФПП, де проходить генерація ФПП(х) та ною точністю 1 ФПП( х) взятих з блоку 6, із ФПП(у) зчитаного зображення, визначаються осФПП(х), визначеною блоком 2. Для цього необхідновні параметри функції площини перетину (S0, но, щоб ФПП(х) була промасштабована у блоці 7(її Хmах, Ymax) та обчислюються інтегральні показники основні параметри приведені до S0e та Іmахе)kx і ky. Дані з блоків 2 і 3 передаються на блок геЕталони, ФПП(xе) яких співпали з ФПП(х), занонерації ФПП правильних фігур 4, де по основним сяться у блок 8 у вигляді масиву XI. Також до блопараметрам (S0, Хmax, Ymax) за аналітичними форку 8 заноситься масив відповідних напрямків х. мулами формуються еталонні ФПП та обчислюються їх інтегральні показники. Для еталонів масиву XI у відповідних напрямЗгенеровані блоком 4 (за допомогою S0, Хmах) ках x проводиться порівняння (блок 5) із заінтегральні показники еталонів kxe в схемі 5 із заданою точністю 1 ФПП( x ) взятих з блоку 6, із даною точністю порівнюються з kx, визначеним ФПП(у), визначеною блоком 2. Для цього необхідблоком 2. Для всіх згенерованих еталонів у блоці 8 но, щоб ФПП(у) була промасштабована у блоці 7(її формуються масиви Х еталонів, які попали до основні параметри приведені до S0e та Imaxe). Етакласу X. лони, ФПЩ( x ) яких співпали з ФПП(у), заноДля еталонів масиву Х у блоці 4 генеруються сяться у блок 8 у вигляді масиву Y1. інтегральні показники kye (S0, Ymax) та проводиться Якщо вхідне зображення відповідає еталону, їх порівняння (блок 5) із заданою точністю з ky, який зберігається у блоці 6, то саме цей еталон визначеним блоком 3. Еталони, для яких відбулоодноосібне має складати масив Y1. У випадку, ся співпадання інтегральних показників kye з ky, коли на одному з етапів ми отримаємо пустий мазаносяться у блок 8 у вигляді масиву Y. сив (X, Y, X1 або Y1), то результат розпізнавання Для еталонів масиву Y у блоці 4(за допомогою негативний. Дане зображення повинно бути занеS0, Xmax) генеруються ФПП(Хе), та проводиться їх сено до блоку пам'яті 6, як новий еталон, шляхом порівняння (блок 5) із заданою точністю 1 з визначення ФПП фігури в напрямках 0 3 /2 ФПП(х), визначеною блоком 2. Еталони, ФПП(Хе) для створення еталонної поверхні. яких співпали з ФПП(х), заносяться у блок 8 у виПроведемо приблизний розрахунок прискогляді масиву X1. рення швидкості порівняння еталонів з викорисДля еталонів масиву X1 у блоці 4(S0, Ymax) гетанням розділення цього процесу на два етапи. неруються ФПП(уе), та проводиться їх порівняння Нехай еталони зберігаються у вигляді числових масивів KxD, де К - кількість напрямків сканування (блок 5) із заданою точністю 1 з ФПП(у), визнаеталонних ФПП( ), з яких складається еталонна ченою блоком 3. Еталони, ФПП(уе) яких співпали з поверхня, D - довжина ФПП( ), Е - кількість етаФПП(у), заносяться у блок 8 у вигляді масиву Y1. Якщо вхідне зображення відповідає одному лонів, m - кількість ФПП( ), для яких відбулося еталону, який генерується у блоці 4, то саме цей співпадання при порівнянні з ФПП(х). Приймемо еталон одноосібне має складати масив Y1. У вичас порівняння двох чисел за одиницю. падку, коли на одному з етапів ми отримаємо пус 7 13591 8 В прототипі порівняння ФПП(х) з усіма еталонзавжди буде менше загальної кількості напрямків сканування, тоді ними ФПП( ) займає E.K.D одиниць часу, потім E K (q p) D m 1 q p m 1 для m еталонів проводиться порівняння еталонних E K D m D D E K m E K D m D D ФПП( ) з ФПП(у), що займає m.D одиниць часу. Таким чином, швидкодія даного методу в поріЗагальний час порівняння таким чином буде дорівнянні з еталоном збільшується приблизно в D раз внювати E K D+m D. (D=Іmахе). При використанні пропонуємої модифікації по. Пропонуємий спосіб розпізнавання фігур базурівняння kx з k еталонних ФПП( ) займає Е К ється на критерії, інваріантному відносно такого одиниць часу (визначення класу X), для m еталонафінного перетворення, як паралельний зсув. При них ФПП( ), для яких відбулося співпадання зміні розмірів фігури її функції площини перетину (m ), проводиться порівняння ky з k . Воно не змінюють форми, та легко масштабуються за розмірами, а інтегральні показники взагалі не змізаймає m одиниць часу. На цьому етапі визначанюються. Не має необхідності поводити визначенється р ФПП( ) еталонів, які відносяться до класу ня ФПП вхідного зображення у всіх напрямках, Y. Далі проводиться детальний етап порівняння тому що значення ФПП для всіх можливих напряеталонів класу Y з ФПП(х), де визначається q ета. мків зберігається у вигляді еталонних поверхонь. лонів класу X1 ( q p ). Він займає p D одиниць чаВнаслідок цього розпізнавання зображення можсу. Останнім кроком розпізнавання буде детальливе незалежно від кута його повороту за наявноний етап порівняння еталонів класу X1 з ФПП(у), . сті відповідного еталону. де визначається клас Y1 еталонів. Він займає q D Даний спосіб розпізнавання дозволяє підвиодиниць часу. Загальний час запропонованого щити швидкодію роботи пристрою розпізнавання. процесу порівняння буде дорівнювати Е К+m+(q+p) D. Приймемо K m p q . Це виходить з того, що при великій кількості еталонів, однакових k Комп’ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for identifying planar geometric figures
Автори англійськоюBilan Stepan Mykolaiovych
Назва патенту російськоюСпособ распознавания плоских геометрических фигур
Автори російськоюБилан Степан Николаевич
МПК / Мітки
МПК: G06K 9/70
Мітки: фігур, плоских, геометричних, розпізнавання, спосіб
Код посилання
<a href="https://ua.patents.su/4-13591-sposib-rozpiznavannya-ploskikh-geometrichnikh-figur.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання плоских геометричних фігур</a>
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 48903
Опубліковано: 15.08.2002
Автори: Южаков Сергій Васильович, Білан Степан Миколайович, Домбровська Наталія Валентинівна, Бендерук Ірина Миколаївна
Мітки: фігур, розпізнавання, спосіб, плоских, геометричних
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та її копії, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копії, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному...
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 51190
Опубліковано: 15.11.2002
Автори: Білан Степан Миколайович, Ал Зобі Салім
Мітки: розпізнавання, геометричних, спосіб, плоских, фігур
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра,...
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури
Номер патенту: 7027
Опубліковано: 15.06.2005
Автори: Кондратенко Наталія Романівна, Гринюк Ірина Миколаївна, Білан Степан Миколайович
Мітки: спосіб, фігур, основі, розпізнавання, зображень, плоских, відношень, площин, фігури, елементів
Формула / Реферат:
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, що включає центрування вхідного зображення за допомогою блока центрування пристрою, повертання зображення об'єкта навколо центра на дискретний кут за допомогою блока обробки та S (БО
Спосіб розпізнавання мовленнєвих одиниць
Номер патенту: 61248
Опубліковано: 17.11.2003
Автори: Старушко Дмитро Георгійович, Шевченко Анатолій Іванович, Шелєпов Владислав Юрійович
МПК: G10L 13/00, G10L 15/00
Мітки: спосіб, одиниць, мовленнєвих, розпізнавання
Формула / Реферат:
1. Спосіб розпізнавання мовленнєвих одиниць, що полягає в перетворенні мовленнєвого сигналу на електричний сигнал, дискретизації й оцифровці, виділенні фрагмента цифрового сигналу, визначенні енергії цифрового сигналу виділеного фрагмента, формуванні еталонів, обчисленні відстані й ухваленні рішення про розпізнавання, який відрізняється тим, що виконують високочастотну фільтрацію цифрового сигналу виділеного фрагмента, визначають енергію...
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Остап Олег Петрович, Русин Богдан Павлович, Остап Володимир Петрович
МПК: G06K 9/68
Мітки: спосіб, розпізнавання, зображень
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Попередній патент: Спосіб лікування раку щитоподібної залози
Наступний патент: Спосіб визначення стану гомеостазу
Випадковий патент: Рятувальне знаряддя для зимового періоду на воді