Рекуперативний гідропривід крана-маніпулятора
Номер патенту: 53843
Опубліковано: 25.10.2010
Автори: Ловейкін Вячеслав Сергійович, Міщук Дмитро Олександрович
Формула / Реферат
Рекуперативний гідропривід крана-маніпулятора, що складається з гідронасоса, проточного гідророзподільника, переливних клапанів, фільтра, гідробака, нагнітальної та зливної магістралей, підвідних робочих гідроліній, привідних гідроциліндрів підйому стріли, складання стріли, висування стріли, висувних опор та гідромотора поворотної колони, який відрізняється тим, що в гідросистему керування привідних гідроциліндрів встановлюють пропорційний проточний гідророзподільник з електромагнітним приводом по кожному золотнику із дросельними проточками на кожному із золотників, електричні виходи з якого підключено через клемну коробку, підсилювачі аналогових сигналів - до дискретних виходів контролера АЦП/ЦАП, а нагнітальні секції привідних гідроциліндрів через двопозиційний регулювальник потоку підключено до гідроакумулятора, вихідний канал якого під'єднано через переливний клапан та систему зворотних клапанів до вхідного каналу гідронасоса, при цьому електричні виходи двопозиційних розподільників через клемну коробку та підсилювачі аналогових сигналів підключені до дискретних виходів контролера АЦП/ЦАП, а аналогові входи контролера АЦП/ЦАП приєднано до датчиків переміщення, які встановлені на привідних гідроциліндрах стріли крана-маніпулятора.
Текст
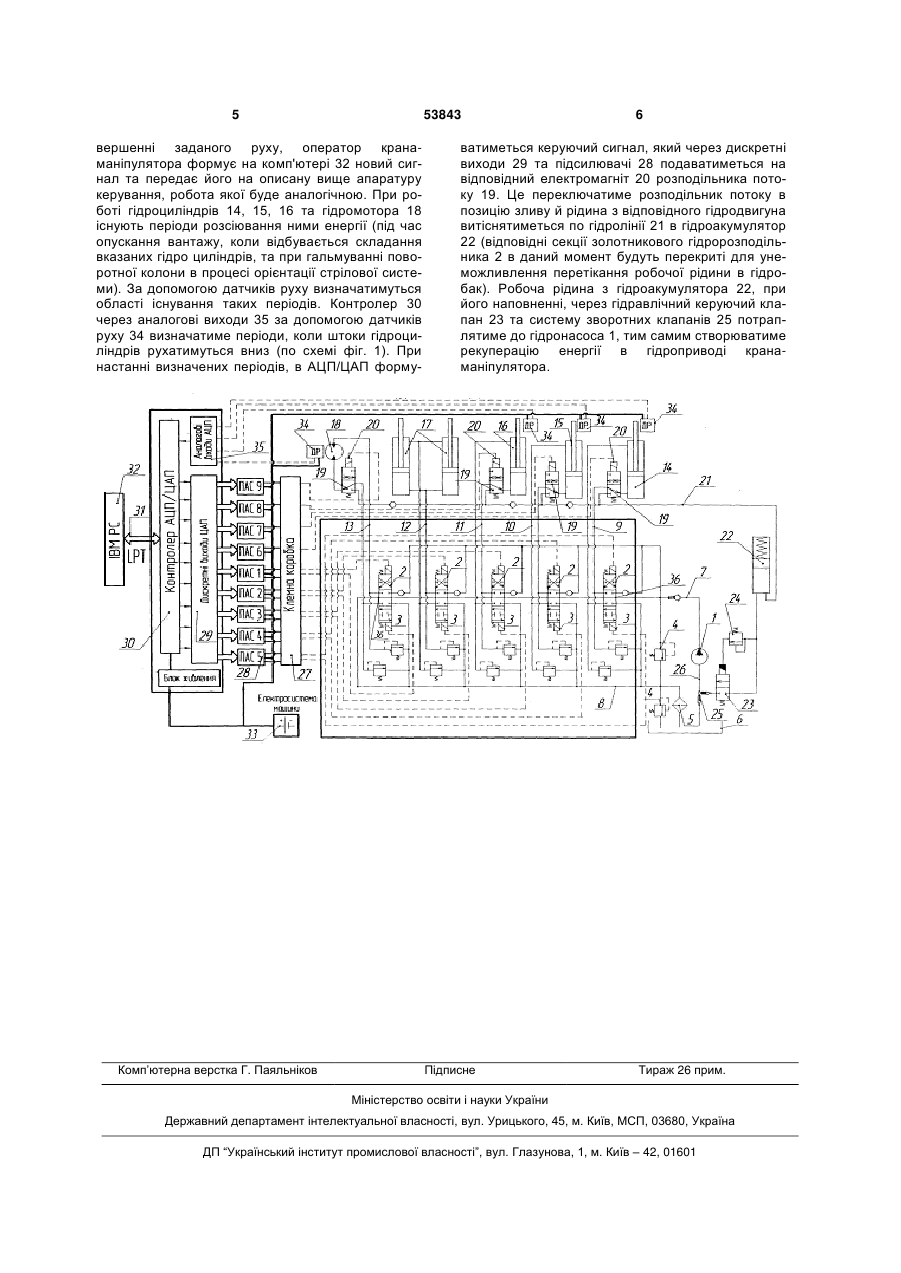
Рекуперативний гідропривід кранаманіпулятора, що складається з гідронасоса, проточного гідророзподільника, переливних клапанів, фільтра, гідробака, нагнітальної та зливної магістралей, підвідних робочих гідроліній, привідних гідроциліндрів підйому стріли, складання стріли, висування стріли, висувних опор та гідромотора поворотної колони, який відрізняється тим, що в гідросистему керування привідних гідроциліндрів встановлюють пропорційний проточний гідророз 3 чи щілини [патент України №18681, кл. В60Р1/64, публ. 15.11.2006.]. Запропонована гідросистема створюватиме плавність процесу пуску та гальмування виконавчих органів крана - маніпулятора, зменшуючи тим самим динамічні навантаження на механізми системи приводу, проте не зменшуючи енергоємність процесу роботи крана - маніпулятора. Іншим недоліком такої системи гідроприводу є неможливість її програмування на задані закони руху через відсутність підключення гідроапаратури до електронних машин обрахунку через те, що на даному прототипі встановлена система гідроприводу з ручним керуванням. Технічним завданням корисної моделі є зменшення навантаження на гідронасос системи приводу та зменшення енерговитрат крана - маніпулятора при його роботі, без зменшення ефективності, за рахунок вдосконалення вищезгаданої системи гідроприводу. Поставлене корисною моделлю завдання досягається тим, що в гідросистему крана - маніпулятора замість проточного гідророзподільника з ручним керуванням встановлюють пропорційний електрогідравлічний золотниковий розподільник із дросельними проточками на кожному із золотників, двопозиційний розподільник потоку з електромагнітним керуванням, підпружинений переливний клапан із гідравлічною керуючою лінією, гідпроакумулюючий пристрій та систему цифро - аналогового керування. Робота такої системи гідроприводу крана - маніпулятора ґрунтується на дисипативних властивостях маніпуляторів [Жавнер В. Л., Крамской Э. И. «Погрузочные манипуляторы». - Л.: Машиностроение, 1975 - 160 с]. В запропонованій гідросистемі робоча рідина накопичуватиметься в гідроакумуляторі, звідки через систему відводу потраплятиме до лінії низького тиску гідронасоса, тим самим зменшуватиме навантаження на приводному валу гідронасоса, що зменшуватиме енергетичні витрати. Цифро аналогова система керування визначатиме області та періоди, коли кран - маніпулятор працює в режимі розсіяння енергії та подаватиме відповідний керуючий сигнал на керуючі пристрої для накопичення енергії в гідроакумуляторі. Накопичена в гідроакумуляторі робоча рідина через автономну систему переливу під тиском подаватиметься в канал низького тиску гідронасоса системи гідроприводу, тим самим зменшуватиме перепад тиску в гідронасосі, що зменшуватиме миттєву споживчу потужність гідронасоса та зменшуватиме навантаження на його робочі органи. Технічна суть і принцип дії рекуперативного гідроприводу крана - маніпулятора пояснюється кресленням, де: на фіг. - зображено гідравлічну схему кранаманіпулятора із рекуперацією енергії. Рекуперативний гідропривід кранаманіпулятора складається з гідронасоса 1, пропорційного проточного гідророзподільника 2 з електромагнітним приводом 3, розташованим на кожному із золотників, переливних клапанів 4, фільтра 5, гідробака 6, нагнітальної 7 та зливної 8 магістралей, підвідних робочих гідроліній 9, 10, 11, 12, 53843 4 13. До гідросистеми також входять привідні гідродвигуни: гідроциліндр підйому стріли 14, складання стріли 15, висування стріли 16, висувних опор 17 та гідромотору 18 поворотної колони. Поршневі порожнини гідроциліндрів 14, 15, 16 та нагнітальні секції гідромотора 18 з'єднано з відповідними каналами пропорційного гідророзподільника 2 гідросистеми крана-маніпулятора через двопозиційні розподільники потоку 19 з електромагнітним керуванням 20, зливні канали яких через гідролінію 21 приєднано до гідроакумулятора 22. Гідроакумулятор 22, через підпружинений переливний клапан 23 із гідравлічним керуючим клапаном 24 та систему зворотних клапанів 25, з’єднано з вхідним каналом 26 гідронасоса 1. Електричні виходи електромагнітів 3 та 20 гідророзподільника 2 та 19 через клемну коробку 27 замкнені на підсилювачах аналогових сигналів (ПАС) 28. До підсилювачів аналогових сигналів підключено дискретні виходи 29 контролера цифро-аналогового перетворювача (АЦП/ЦАП) 30, який через канал передачі даних 31 приєднано до персонального комп'ютера 32. Живлення струмом підсилювачів аналогових сигналів (ПАС) 28 відбувається від електросистеми 33 базовоїмашини крана-маніпулятора. Електронна система наведеної гідросистеми також містить датчики руху 34, що знаходяться на виконавчих гідродвигунах 14, 15, 16 та 18. Датчики руху приєднано до аналогових входів 35 контролера аналого-цифрового перетворювача (АЦП/ЦАП) 30. Живлення датчиків 34 здійснюється від електросистеми 33. Рекуперативний гідропривід кранаманіпулятора працює наступним чином. За допомогою двигуна базової машини приводять в роботу робочий гідронасос 1 системи приводу. Від гідронасосу 1 робоча рідина з гідробака 6 по напірній гідролінії 7 потрапляє в проточний канал 36 електропропорційного гідророзподільника 2. При нейтральному положенні всіх золотників рідина через проточний канал 36 гідророзподільника через зливну гідролінію 8 та фільтр 5 потрапляє в гідробак 6. Визначивши необхідний режим та траєкторію руху, оператор крана - маніпулятора, за допомогою програмного забезпечення, формує цифровий керуючий сигнал на комп'ютері 32, який потоком даних передається на контролер (АЦП/ЦАП) 30. Контролер 30 перетворює отриманий потік числових даних на величину сили струму та через дискретні виходи 29 передає його на відповідний підсилювач (ПАС) 28, де керуюча сила струму підсилюється до величини пропорційної величині струму живлення пропорційних електромагнітів 3 відповідної секції гідророзподільника 2 (фіг. 1). Підсилювачі 28 через клемну коробку 27 подають струм на відповідний електромагніт 3 розподільника 2. При подачі на електромагніти 3 струму, вони встановлюють відповідний золотник розподільника 2 в заданому положенні, тим самим відкривають прохідний отвір розподільника 2, по якому робоча рідина потрапляє від гідронасосу через підвідну гідролінію до привідного гідродвигуна кранаманіпулятора, що приводитиме його в рух. По за 5 53843 вершенні заданого руху, оператор кранаманіпулятора формує на комп'ютері 32 новий сигнал та передає його на описану вище апаратуру керування, робота якої буде аналогічною. При роботі гідроциліндрів 14, 15, 16 та гідромотора 18 існують періоди розсіювання ними енергії (під час опускання вантажу, коли відбувається складання вказаних гідро циліндрів, та при гальмуванні поворотної колони в процесі орієнтації стрілової системи). За допомогою датчиків руху визначатимуться області існування таких періодів. Контролер 30 через аналогові виходи 35 за допомогою датчиків руху 34 визначатиме періоди, коли штоки гідроциліндрів рухатимуться вниз (по схемі фіг. 1). При настанні визначених періодів, в АЦП/ЦАП форму Комп’ютерна верстка Г. Паяльніков 6 ватиметься керуючий сигнал, який через дискретні виходи 29 та підсилювачі 28 подаватиметься на відповідний електромагніт 20 розподільника потоку 19. Це переключатиме розподільник потоку в позицію зливу й рідина з відповідного гідродвигуна витіснятиметься по гідролінії 21 в гідроакумулятор 22 (відповідні секції золотникового гідророзподільника 2 в даний момент будуть перекриті для унеможливлення перетікання робочої рідини в гідробак). Робоча рідина з гідроакумулятора 22, при його наповненні, через гідравлічний керуючий клапан 23 та систему зворотних клапанів 25 потраплятиме до гідронасоса 1, тим самим створюватиме рекуперацію енергії в гідроприводі кранаманіпулятора. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRecuperative hydraulic drive of crane-manipulator
Автори англійськоюLoveikin Viacheslav Serhiiovych, Mischuk Dmytro Oleksandrovych
Назва патенту російськоюРекуперативный гидропривод крана-манипулятора
Автори російськоюЛовейкин Вячеслав Сергеевич, Мищук Дмитрий Александрович
МПК / Мітки
Мітки: рекуперативний, крана-маніпулятора, гідропривід
Код посилання
<a href="https://ua.patents.su/3-53843-rekuperativnijj-gidroprivid-krana-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Рекуперативний гідропривід крана-маніпулятора</a>
Прилад захисту крана
Номер патенту: 2732
Опубліковано: 16.08.2004
Автори: Степанчак Ігор Мирославович, Сосяк Богдан Миколайович, Лисяк Богдан Ростиславович, Сея Руслан Едуардович, Волков Володимир Петрович, Коваленко Володимир Ілліч, Бродяк Любомир Михайлович
МПК: B66C 23/88
Формула / Реферат:
Прилад захисту крана, що містить датчик кута нахилу стріли, датчик довжини стріли, датчик кута повороту поворотної рами крана, датчик навантаження крана, кінцеві вимикачі, блок керування робочими операціями крана, під'єднаний до обчислювача, модуль накопичування, силові ключі і цифрове табло, який відрізняється тим, що обчислювач виконаний з під'єднаним єдиним інтерфейсом, до якого під'єднані додаткові обчислювачі з додатковими датчиками,...
Гідропривід щелеп грейферного навантажувача
Номер патенту: 28007
Опубліковано: 26.11.2007
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Дудченко Ігор Владиславович
МПК: B66C 3/00
Мітки: навантажувача, гідропривід, щелеп, грейферного
Формула / Реферат:
Гідропривід щелеп грейферного навантажувача, що містить гідробак, гідронасос, чотирипозиційний гідророзподільник, два гідроциліндри, гідравлічні трубопроводи, який відрізняється тим, що між чотирипозиційним гідророзподільником та гідроциліндрами встановлено поворотний гідравлічний розподільник, виконаний з можливістю керування двопозиційним семиходовим гідророзподільником з гідравлічним керуванням і автоматичною фіксацією положень,...
Грейферне устаткування крана з телескопічною стрілою
Номер патенту: 66830
Опубліковано: 15.06.2004
Автор: Охримович Володимир Маркіянович
МПК: B66C 3/00, B66C 23/26
Мітки: стрілою, крана, устаткування, грейферне, телескопічною
Формула / Реферат:
Грейферне устаткування крана з телескопічною стрілою, що містить двоканатний грейфер, нижня головка якого через строп, гакову підвіску і багатократний поліспаст між гаковою підвіскою і оголовком стріли з’єднана вантажним канатом з вантажною лебідкою, встановленою на поворотній частині крана, а верхня головка з’єднана грейферним канатом з грейферною лебідкою, встановленою між опорною і поворотною частинами крана і охоплюючою барабаном...
Поліспастова система повороту стріли маніпулятора
Номер патенту: 45209
Опубліковано: 26.10.2009
Автор: Іваненко Вячеслав Іванович
МПК: B66F 9/12
Мітки: система, стріли, поліспастова, маніпулятора, повороту
Формула / Реферат:
Поліспастова система повороту стріли маніпулятора, що містить основу у вигляді трикутної рами, до якої за допомогою двох співвісних у вертикальній площині шарнірів прикріплена вантажозахоплювальна стріла, яка приводиться у рух силовими гідроциліндрами, і гідросистему для керування циліндрами, причому знизу трикутної рами встановлені балки, що несуть опорні башмаки, яка відрізняється тим, що додатково містить шків, закріплений ексцентрично на...
Гідропривід щелеп грейферного навантажувача
Номер патенту: 21979
Опубліковано: 10.04.2007
Автори: Дудченко Ігор Владиславович, Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович
МПК: B66C 3/00
Мітки: гідропривід, грейферного, щелеп, навантажувача
Формула / Реферат:
Гідропривід щелеп грейферного навантажувача, що містить гідробак, гідронасос, чотирипозиційний гідророзподільник, два гідроциліндри, гідравлічні трубопроводи, який відрізняється тим, що між чотирипозиційним гідророзподільником та гідроциліндрами встановлений гідравлічний перетворювач, для керування яким передбачений двопозиційний восьмиходовий гідророзподільник з гідравлічним керуванням і автоматичною фіксацією положень, двопозиційний...
Попередній патент: Кран-маніпулятор із цифровим керуванням
Наступний патент: Спосіб діагностики ушкоджень та нестабільності гомілковостопного суглоба
Випадковий патент: Молотарка льону-довгунця