Поліспастова система повороту стріли маніпулятора
Формула / Реферат
Поліспастова система повороту стріли маніпулятора, що містить основу у вигляді трикутної рами, до якої за допомогою двох співвісних у вертикальній площині шарнірів прикріплена вантажозахоплювальна стріла, яка приводиться у рух силовими гідроциліндрами, і гідросистему для керування циліндрами, причому знизу трикутної рами встановлені балки, що несуть опорні башмаки, яка відрізняється тим, що додатково містить шків, закріплений ексцентрично на вантажозахоплювальній стрілі, вісь якого співвісна з осями двох співвісних у вертикальній площині шарнірів, через які вантажозахоплювальна стріла прикріплена до основи, причому зазначений шків огинає через напрямні ролики трос, який кінематично зв'язаний зі штоком вертикально встановленого гідроциліндра, та механізм натягування троса будь-якої відомої конструкції.
Текст
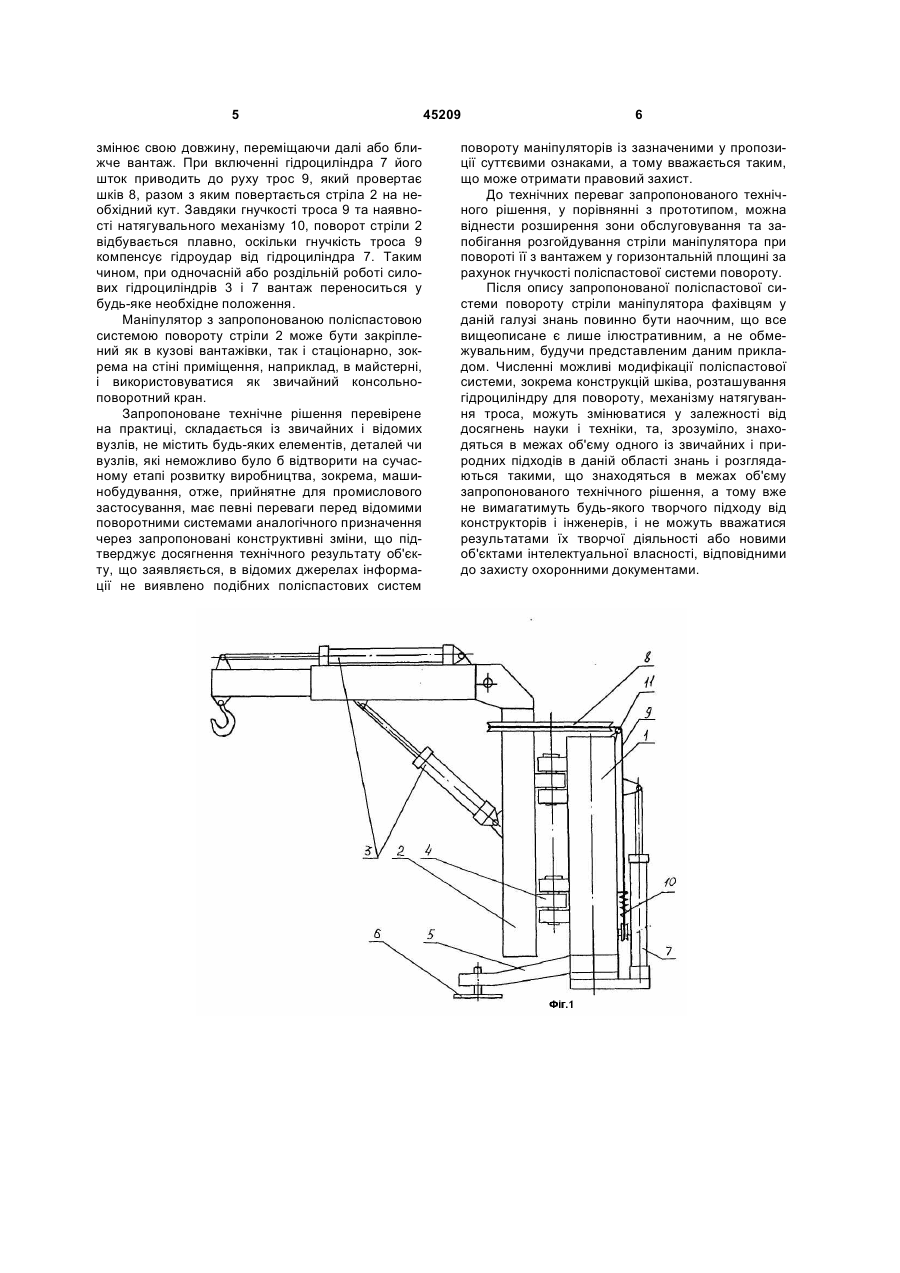
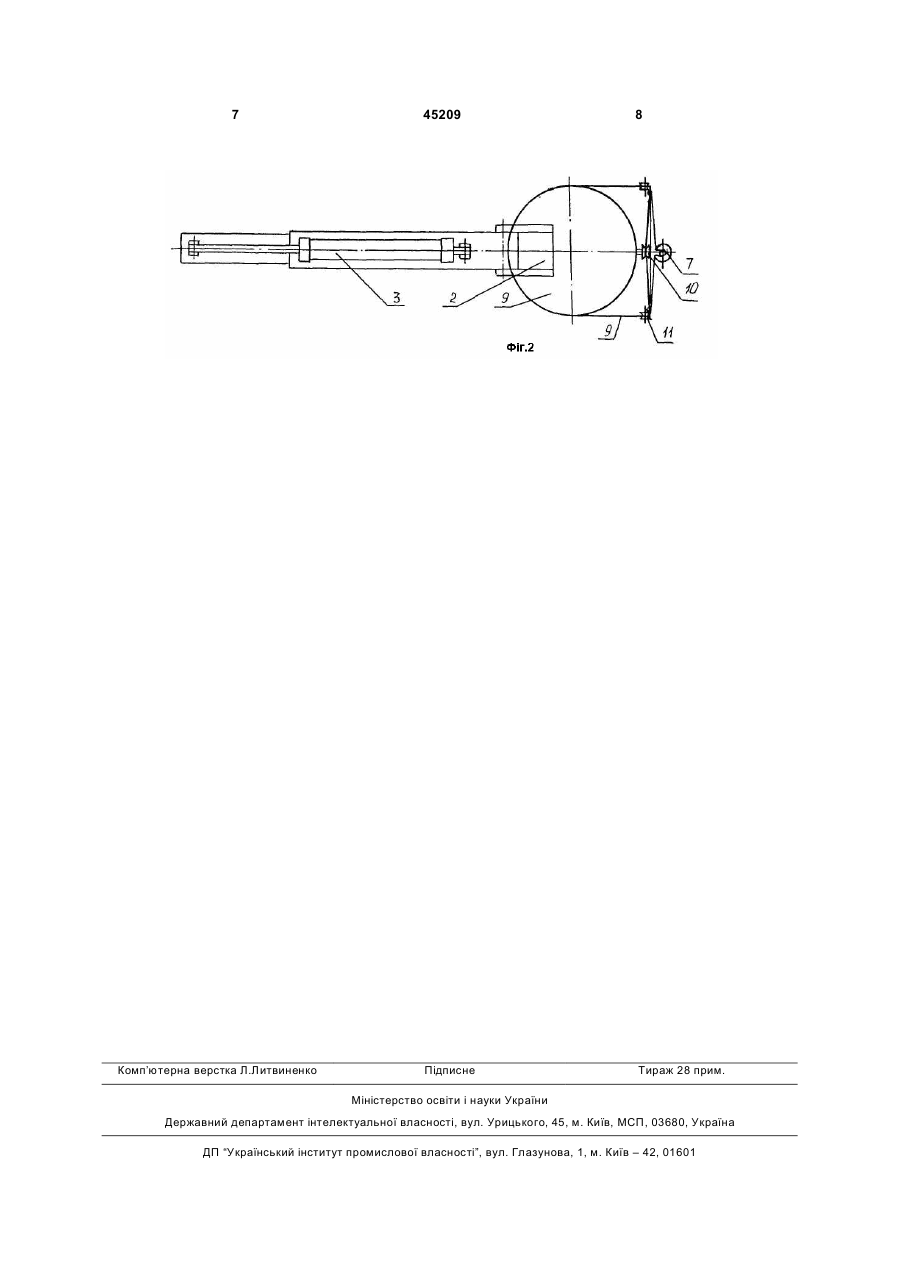
Поліспастова система повороту стріли маніпулятора, що містить основу у вигляді трикутної рами, до якої за допомогою двох співвісних у вертикальній площині шарнірів прикріплена вантажозахоплювальна стріла, яка приводиться у рух силовими гідроциліндрами, і гідросистему для 3 кальній площині, шток гідроциліндра повинен бути достатньо довгим і переміщатися на значну відстань. Але довжина штока визначає довжину корпусу гідроциліндра, оскільки ці дві деталі коаксіальні і взаємозв'язані. Горизонтальний поворот вантажозахоплювальної стріли забезпечується втягуванням штоку в корпус одного з гідроциліндрів та витягування з корпусу штоку другого гідроциліндра. Тому вантажозахоплювальна стріла може повернутися в горизонтальній площині лише до упору в корпус гідроциліндра. Збільшити кут повороту можна шляхом зменшення довжини корпусу гідроциліндра, але при цьому автоматично зменшується кут підйому-опускання вантажозахоплювальної стріли у вертикальній площині. Другим істотним недоліком відомої системи повороту стріли маніпулятора є виникнення ефекту шоткості (кутового коливання стріли при розгойдуванні вантажу) при повороті стріли у горизонтальній площині, що обумовлено використанням для цієї операції саме двох силових гідроциліндрів, при включенні яких неминуче виникає гідравлічний удар у гідравлічній системі, оскільки рідина (машинне масло) не стискується (не змінює свого об'єму). Гідроудар спотворює різкий початок руху стріли при її повороті. Оскільки вантаж не жорстко зв’язаний зі стрілою, то при зазначеному (різкому) початку повороту стріли, він, в силу інерційності, одразу починає відставати та через це розгойдуватися, що в цілому заважає виконанню вантажнорозвантажувальних робіт та може призвести до виходу зі строю гідравлічної системи через те, що коливання стріли примусово переміщує штоки гідроциліндрів, через які виникає додаткове навантаження на гідросистему, зокрема, на клапани та золотники, які є досить чутливими її вузлами. В основу корисної моделі поставлене завдання розширення зони обслуговування та підвищення зручності виконання вантажнорозвантажувальних робіт шляхом запобігання розгойдування стріли маніпулятора при повороті її з вантажем у горизонтальній площині за рахунок зміни принципової жорсткої схеми повороту стріли на більш гнучку. Рішення поставленої задачі досягається тим, що у відомій системі повороту стріли маніпулятора, яка містить основу у вигляді трикутної рами, до якої за допомогою двох співвісних у вертикальній площині шарнірів прикріплена вантажозахоплювальна стріла, яка приводиться у рух силовими гідроциліндрами, і гідросистему для керування циліндрами, причому знизу трикутної рами встановлені балки, що несуть опорні башмаки, згідно пропозиції, система повороту маніпулятора містить шків, закріплений ексцентрично на вантажозахоплювальній стрілі та вісь якого співвісна з осями двох співвісних у вертикальній площині шарнірів, через які вантажозахоплювальна стріла прикріплена до основи, причому зазначений шків огинає через напрямні ролики трос, кінематично зв'язаний зі штоком вертикально встановленого гідроциліндра, та механізм натягування троса будь-якої відомої конструкції. Застосування тросової схеми приведення до горизонтального руху вантажозахоплювальної 45209 4 стріли, дозволяє, за суттю, вважати запропоновану систему повороту поліспастовою. Запропоновані конструктивні зміни системи повороту стріли маніпулятора дозволяють досягти технічного результату, вказаного в постановці вирішуваної задачі. Так, застосування поліспастової системи повороту стріли, яка утворена тросом, шківом та гідроциліндром з механізмом натягування троса, виключає можливість появи гідроудару у цьому механічному вузлі через гнучкість троса, який взаємодіє зі штоком гідроциліндра. Отже маніпулятор при повороті вантажозахоплювальної стріли завжди починає рух плавно, що виключає розгойдування на ній вантажу. Запропонована поліспастова схема повороту стріли дозволяє повертати її на більший кут ніж при застосуванні схеми за прототипом, та саме так збільшити зону обслуговування. Подальша сутність корисної моделі пояснюється спільно з ілюстративним матеріалом, на якому зображено наступне: Фіг. 1 - конструктивна схема поліспастової системи повороту стріли маніпулятора, вигляд збоку; Фіг. 2 -теж саме, вигляд зверху. Маніпулятор містить основу 1, виконану у вигляді плоскої трикутної рами, до якої шарнірно прикріплена поворотна вантажозахоплювальна стріла 2, яка приводяться у рух силовими гідроциліндрами 3, які призначені для переміщування елементів стріли 2 у вертикальній площині та зміни довжини стріли 2, і гідросистему для керування гідроциліндрами (не показана, оскільки є штатною системою трактора). Вантажозахоплювальна стріла 2 прикріплена до основи 1 за допомогою двох співвісних у вертикальній площині шарнірів 4. Знизу основи 1 встановлені балки 5, що несуть опорні башмаки 6. Поліспастова система повороту вантажозахоплювальної стріли 2 маніпулятора складається з одного вертикально встановленого гідроциліндра 7 та шківа 8, закріпленого ексцентрично на стрілі 2. Вісь обертання вказаного шківа 8 співпадає з осями двох співвісних у вертикальній площині шарнірів 4, через які вантажозахоплювальна стріла 2 прикріплена до основи 1. Зазначений шків 8 огинає трос 9, кінематично зв'язаний зі штоком вертикально встановленого гідроциліндра 7. Трос 9 також огинає механізм натягування 10 будь-якої відомої конструкції, наприклад, пружинний, та напрямні ролики 11. Подальша сутність корисної моделі пояснюється спільно з принципом роботи запропонованої поліспастової системи повороту стріли 2 маніпулятора. Вказана система працює на такий спосіб. Трактор під’їжджає до місця стаціонарного зберігання маніпулятора. Маніпулятор прикріплюють до навіски трактора. За допомогою гідросистеми трактора навіску піднімають вгору і трактор їде до місця виконання навантажувальнорозвантажувальних робіт. Після приїзду до місця виконання вантажно-розвантажувальних робіт навіску трактора опускають вниз до упору башмаків 6 у ґрунт. Маніпулятор до експлуатації готовий. При роботі силових гідроциліндрів 3 вантажозахоплювальна стріла 2 здійснює рух у вертикальній площині, піднімаючи або опускаючи вантаж, чи 5 змінює свою довжину, переміщаючи далі або ближче вантаж. При включенні гідроциліндра 7 його шток приводить до руху трос 9, який провертає шків 8, разом з яким повертається стріла 2 на необхідний кут. Завдяки гнучкості троса 9 та наявності натягувального механізму 10, поворот стріли 2 відбувається плавно, оскільки гнучкість троса 9 компенсує гідроудар від гідроциліндра 7. Таким чином, при одночасній або роздільній роботі силових гідроциліндрів 3 і 7 вантаж переноситься у будь-яке необхідне положення. Маніпулятор з запропонованою поліспастовою системою повороту стріли 2 може бути закріплений як в кузові вантажівки, так і стаціонарно, зокрема на стіні приміщення, наприклад, в майстерні, і використовуватися як звичайний консольноповоротний кран. Запропоноване технічне рішення перевірене на практиці, складається із звичайних і відомих вузлів, не містить будь-яких елементів, деталей чи вузлів, які неможливо було б відтворити на сучасному етапі розвитку виробництва, зокрема, машинобудування, отже, прийнятне для промислового застосування, має певні переваги перед відомими поворотними системами аналогічного призначення через запропоновані конструктивні зміни, що підтверджує досягнення технічного результату об'єкту, що заявляється, в відомих джерелах інформації не виявлено подібних поліспастових систем 45209 6 повороту маніпуляторів із зазначеними у пропозиції суттєвими ознаками, а тому вважається таким, що може отримати правовий захист. До технічних переваг запропонованого технічного рішення, у порівнянні з прототипом, можна віднести розширення зони обслуговування та запобігання розгойдування стріли маніпулятора при повороті її з вантажем у горизонтальній площині за рахунок гнучкості поліспастової системи повороту. Після опису запропонованої поліспастової системи повороту стріли маніпулятора фахівцям у даній галузі знань повинно бути наочним, що все вищеописане є лише ілюстративним, а не обмежувальним, будучи представленим даним прикладом. Численні можливі модифікації поліспастової системи, зокрема конструкцій шківа, розташування гідроциліндру для повороту, механізму натягування троса, можуть змінюватися у залежності від досягнень науки і техніки, та, зрозуміло, знаходяться в межах об'єму одного із звичайних і природних підходів в даній області знань і розглядаються такими, що знаходяться в межах об'єму запропонованого технічного рішення, а тому вже не вимагатимуть будь-якого творчого підходу від конструкторів і інженерів, і не можуть вважатися результатами їх творчої діяльності або новими об'єктами інтелектуальної власності, відповідними до захисту охоронними документами. 7 Комп’ютерна верстка Л.Литвиненко 45209 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBlock-and-tackle system of turning boom of manipulator
Автори англійськоюIvanenko Viacheslav Ivanovych
Назва патенту російськоюПолиспастовая система поворота стрелы манипулятора
Автори російськоюИваненко Вячеслав Иванович
МПК / Мітки
МПК: B66F 9/12
Мітки: стріли, повороту, маніпулятора, система, поліспастова
Код посилання
<a href="https://ua.patents.su/4-45209-polispastova-sistema-povorotu-strili-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Поліспастова система повороту стріли маніпулятора</a>
Система підвісу стріли екскаватора
Номер патенту: 41841
Опубліковано: 10.06.2009
Автори: Крупко Валерій Григорович, Діхтенко Руслан Миколайович
МПК: E02F 3/04
Мітки: система, стріли, екскаватора, підвісу
Формула / Реферат:
Система підвісу стріли екскаватора, яка містить балку, л-подібний стояк, стрілу з головними блоками, рукоять з ковшем, яка відрізняється тим, що система підвісу стріли додатково оснащена пружним та демпферним пристроями, причому пружний та демпферний пристрої встановлені на л-подібному стояку.
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Поворотна колонка стріли гідравлічного екскаватора
Номер патенту: 19040
Опубліковано: 15.11.2006
Автори: Васьковський Петро Петрович, Поздняков Володимир Олександрович, Бондарчук Олександр Петрович, Романьков Олександр Іванович
МПК: E02F 3/32
Мітки: гідравлічного, поворотна, екскаватора, колонка, стріли
Формула / Реферат:
Поворотна колонка стріли гідравлічного екскаватора, що містить стійку, виконану у вигляді короба, з вертикальними вушками, які мають отвори під горизонтальні осі для з'єднання колонки відповідно зі стрілою та гідроциліндром стріли, на стійці виконано горизонтальні вушка, які закріплено з протилежного боку від вертикальних вушок і які мають отвори під вертикальні осі для з'єднання з рамою гідравлічного екскаватора, а також горизонтальні вушка...
Система повороту колісного гідравлічного екскаватора
Номер патенту: 21760
Опубліковано: 15.03.2007
Автори: Васьковський Петро Петрович, Поздняков Володимир Олександрович, Бондарчук Олександр Петрович, Романьков Олександр Іванович, Андрієнко Віталій Ілліч
МПК: E02F 3/32
Мітки: гідравлічного, екскаватора, колісного, система, повороту
Формула / Реферат:
1. Система повороту колісного гідравлічного екскаватора, що містить два гідроциліндри зі штоками та задніми кришками, яка відрізняється тим, що в кожному гідроциліндрі установлено демпфер із саморегулювальним клапаном.2. Система за п. 1, яка відрізняється тим, що в демпфері виконано отвори з нерівномірним кроком.3. Система за п. 2, яка відрізняється тим, що кількість отворів становить 6.4. Система за п. 2 або п. 3, яка...
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу
Номер патенту: 15807
Опубліковано: 17.07.2006
Автори: Паламарчук Дмитро Анатолійович, Ярошенко Володимир Федорович, Почка Костянтин Іванович, Ловейкін Вячеслав Сергійович
МПК: B66C 19/00
Мітки: переміщенням, вильоту, вантажу, стріли, зміною, горизонтальним, пристрій, керування, країні
Формула / Реферат:
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, з механізмом зміни вильоту, який відрізняється тим, що містить шарнірно закріплений до стріли гідроциліндр двосторонньої дії з дросельним регулюванням швидкості переміщення робочої рідини з безштокової у штокову порожнини гідроциліндра при можливості зміни...
Попередній патент: Очисна споруда стічних вод
Наступний патент: Спосіб інтегральної оцінки неспецифічної резистентності організму щодо злоякісних пухлин за допомогою реакції канцеролізу
Випадковий патент: Пристрій для витягнення зубів та корекції ширини зубного ряду