Спосіб позиціювання вантажів на авто- і електронавантажувачах і пристрій для його здійснення
Номер патенту: 54893
Опубліковано: 17.03.2003
Автори: Кривешко Олег Володимирович, Мальнов Сергій Іванович, Козлинський Мирослав Петрович, Костюк Володимир Володимирович
Формула / Реферат
1. Спосіб позиціювання вантажів, на авто- і електронавантажувачах при якому вантаж захоплюють, визначають величини напружень, врівноважують вантаж, який відрізняється тим, що величини напружень визначають на кронштейнах рами шасі, а врівноважування вантажу здійснюють переміщенням вил до усунення різниці напружень.
2. Пристрій для позиціювання вантажів на авто- і електронавантажувачах, який містить розташовану на кронштейнах рами шасі вантажопідйомну раму, встановлену на ній з можливістю вертикального переміщення за допомогою ланцюгів вантажну каретку з вилами, два давачі механічних напружень, які одночасно є елементами мостової схеми, електрогідравлічний розподільник, з'єднаний з гідроциліндром, який відрізняється тим, що додатково містить електронно-обчислювальний блок, другий гідроциліндр, який з'єднаний з електрогідравлічним розподільником, який через електронно-обчислювальний блок під'єднаний до мостової схеми, а саме до давачів механічних напружень, які встановлені на кронштейнах рами шасі, вила встановлені з можливістю бокового переміщення.
Текст
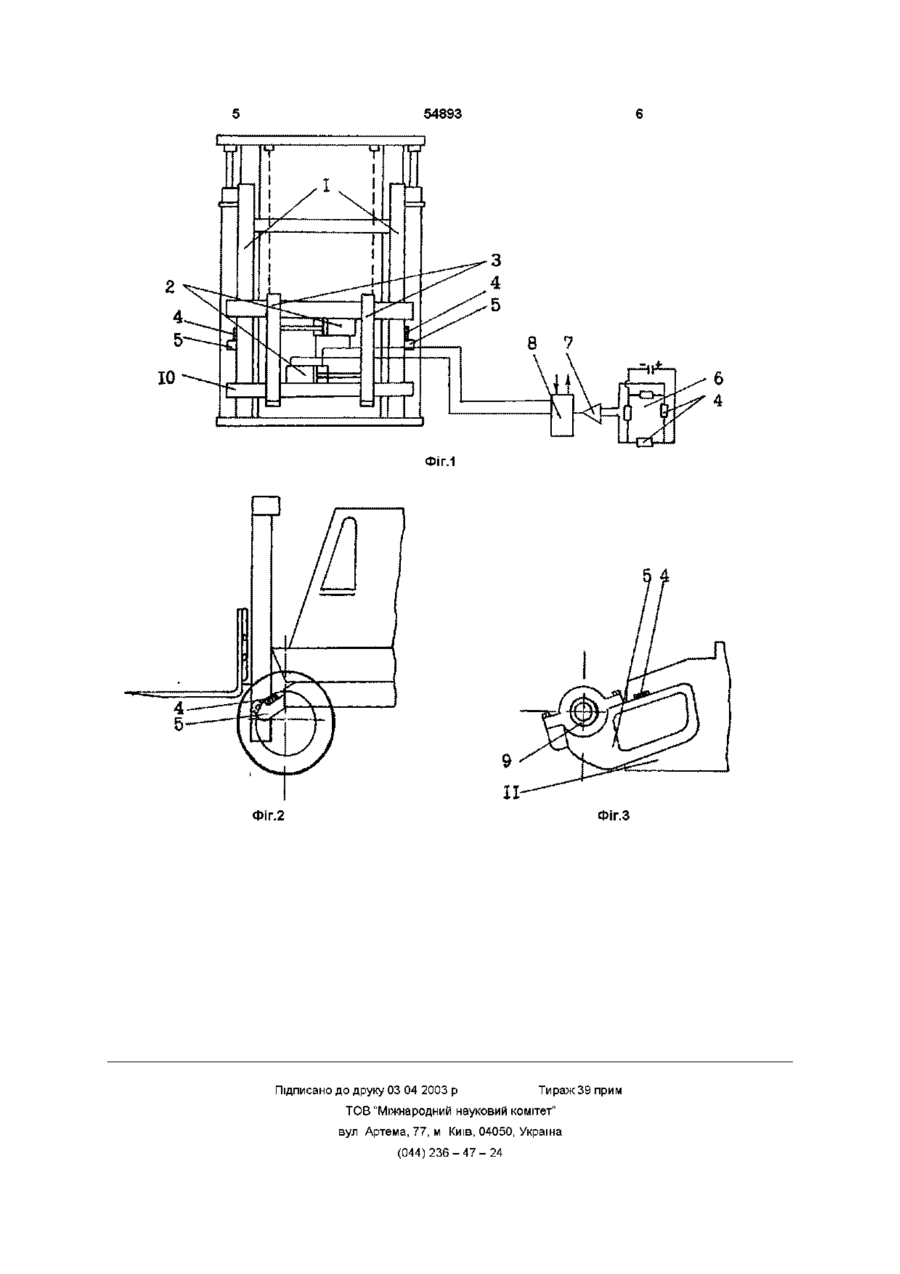
1 Спосіб позиціювання вантажів, на авто- і ел є істро навантажувач ах при якому вантаж захоплюють, визначають величини напружень, врівноважують вантаж, який відрізняється тим, що величини напружень визначають на кронштейнах рами шасі, а врівноважування вантажу здійснюють переміщенням вил до усунення різниці напружень 2 Пристрій для позиціювання вантажів на авто- і ел є ктро навантажувач ах, який містить розташовану на кронштейнах рами шасі вантажопідйомну раму, встановлену на ній з можливістю вертикального переміщення за допомогою ланцюгів вантажну каретку з вилами, два давачі механічних напружень, які одночасно є елементами мостової схеми, електрогідравлічний розподільник, з'єднаний з гідроциліндром, який відрізняється тим, що додатково містить електронно-обчислювальний блок, другий гідроциліндр, який з'єднаний з електрогідравлічним розподільником, який через електронно-обчислювальний блок під'єднаний до мостової схеми, а саме до давачів механічних напружень, які встановлені на кронштейнах рами шасі, вила встановлені з можливістю бокового переміщення Винахід відноситься до області машинобудування, зокрема до піднімально-транспортних машин (авто-1 електронавантажувачів) Відомий спосіб позиціювання вантажів, при якому вантаж захоплюють, визначають величину напружень і при наявності різниці напружень врівноважують вантаж відносно повздовжньої ВІСІ навантажувача (Патент України № 22864 А, В 66F 9/06) Відомий спосіб не дозволяє точно виконувати позиціювання вантажу, при якому отримують інформацію про наявність напружень в ланцюгах за допомогою давачів, що дає неточну інформацію про розцентровку вантажу, і вимагає більших витрат енергії Відомий пристрій для позиціювання вантажів, який містить розташовану на кронштейнах рами шасі вантажопідйомну раму, встановлену на ній з можливістю вертикального переміщення за допомогою ланцюгів вантажну каретку з вилами, два давачі механічних напружень, які одночасно є елементами мостової схеми, електрогідравлічний розподільник, з'єднаний з гідроциліндром (Патент України № 22864 А, В 66F9/06) Однак цей пристрій не дозволяє точно центрувати і врівноважувати вантаж, так як при експлуатації авто- і електронавантажувачів ланцюги витягуються неоднаково і провисають, тому на них виникають різні механічні напруження, що негативно впливає на роботу давачів, які встановлені на цих ланцюгах В основу винаходу покладено завдання створити спосіб позиціювання вантажів на авто- і електронавантажувачах і пристрій для його здійснення в якому, за рахунок врівноважування зусиль на кронштейнах рами шасі, досягається зниження витрат енергії, підвищення продуктивності авто- і електронавантажувачів Поставлене завдання вирішується тим, що спосіб позиціювання вантажів на авто- і електронавантажувачах, згідно якого вантаж захоплюють, визначають величину напружень і при наявності різниці напружень врівноважують вантаж, згідно винаходу, величину напружень визначають на кронштейнах рами шасі, а позиціювання вантажів здійснюють переміщенням вил до усунення різниці напружень на кронштейнах рами шасі Позиціюванням вантажу на авто- і електрона CO о> 00 ю 54893 вантажувачах добиваються чіткого співпадання центру мас вантажу з повздовжньою віссю симетрії авто-1 електронавантажувачів, чим покращують СТІЙКІСТЬ руху, СТІЙКІСТЬ проти перекидання в поперечній площині, керованість і безпеку руху Визначенням величини напружень на кронштейнах рами шасі авто- і електронавантажувачів отримують точну інформацію про розцентровку вантажу і виключають можливість непотрібного переміщення вил, що підвищує продуктивність авто-1 електронавантажувачів Поставлене завдання вирішується також тим, що у пристрої для позиціювання вантажів на автоі електрон а вантажувачах, який містить розташовану на кронштейнах раму шасі, встановлену на ній з можливістю вертикального переміщення за допомогою ланцюгів вантажну каретку з вилами, два давачі механічних напружень, які одночасно є елементами мостової схеми, електрогідравлічний розподільник, з'єднаний з гідроциліндром, згідно винаходу, додатково містить другий гідроциліндр який з'єднаний з електрогідравлічним розподільником, який через електронно-обчислювальний блок під'єднаний до мостової схеми, а саме до давачів механічних напружень, які встановлені на кронштейнах рами шасі, вила встановлені з можливістю бокового переміщення Встановлення давачів механічних напружень на кронштейнах рами шасі, дозволяє точніше отримувати інформацію про розцентровку вантажу, введення електронно-обчислювального блоку, який регулює роботу електрогідравлічного розподільника, дозволяє підвищити продуктивність праЦі Введення вил з можливістю бокового переміщення і двох гідроциліндрів переміщення вил, за допомогою яких ефективніше центрують вантаж, дозволяє покращити СТІЙКІСТЬ руху, СТІЙКІСТЬ проти перекидання в поперечній площині, керованість і безпеку руху На фіг 1 зображений пристрій для позиціювання вантажів на а вто-ел є ктро на вантажувачах, на фіг 2 - розміщення вантажопідйомника на кронштейнах рами шасі авто- і еле ктро навантажувач а, на фіг 3 - кронштейн рами шасі авто- і електронавантажувача, де 1 - рама вантажопідйомника, 2 перший та другий гідроциліндри вил, 3 - вила, 4 давачі механічних напружень, 5 - кронштейн рами шасі, 6 - мостова схема, 7 - електроннообчислювальний блок, 8 - електрогідравлічний розподільник, 9 - цапфа рами вантажопідйомника, 10 - вантажна каретка, 11 - рама шасі Спосіб позиціювання вантажів на авто- і електронавантажувачах здійснюється так вантаж захоплюють, визначають величину напружень на кронштейнах 5 рами шасі, при наявності різниці напружень, врівноважуванням позиціюють вантаж, позиціювання вантажу здійснюють переміщенням вил 3 до усунення різниці напружень Пристрій для позиціювання вантажів на авто- і еле ктро на вантажувачах містить розташовану на кронштейнах 5 рами шасі раму 1 вантажопідйомника і встановлену на ній з можливістю вертикального переміщення за допомогою ланцюгів вантажну каретку 10 з вилами 3, які встановлені з можливістю бокового переміщення, два давачі механічних напружень 4, які одночасно є елементами мостової схеми 6, яка через електроннообчислювальний блок 7 з'єднана з електрогідравлічним розподільником 8, який з'єднаний з першим і другим гідроциліндрами 2 вил З Пристрій працює так при захопленні вантажу розподіл навантаження через вили 3, каретку 10 раму вантажопідйомника 1 та цапфу рами 9 передається на кронштейни 5 рами шасі авто- і електронавантажувача Навантаження на кронштейнах рами 5 може бути різним, тобто один кронштейн 5 відносно другого є більше завантажений Якщо центр ваги вантажу не співпадає з повздовжньою віссю симетрії авто- і еле ктро навантажувач а, тоді навантаження на кронштейнах 5 рами шасі буде неоднакове, тому механічні напруження на них будуть різні, і, ВІДПОВІДНО, сигнали з давачів 4 будуть різні, що приведе до виникнення різниці потенціалів в мостовій схемі 6 Сигнал з мостової схеми 6 надходить до електронно-обчислювального блоку 7, який обробляє сигнал і регулює роботу електрогідравлічного розподільника 8 Електрогідравлічний розподільник 8 вмикає подачу рідини у ВІДПОВІДНІ порожнини першого і другого гідроциліндрів 2 для поперечного зміщення двох вил 3 разом з вантажем Як тільки навантаження на кронштейнах 5 рами шасі вирівняється, тобто напруження в них стане рівним, тоді електроннообчислювальний блок 7, на який надходять сигнали з мостової схеми 6, вимикає електрогідравлічний розподільник 8, який припиняє подачу рідини в гідроциліндри 2 вил 3, і зупиняє їхній рух За рахунок вище вказаної роботи проводиться позиціювання вантажу відносно повздовжньої ВІСІ авто- і електронавантажувачів 54893 Фіг.1 Фіг.2 Фіг.З Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for positioning loads on auto- and electroloaders
Автори англійськоюKozlynskyi Myroslav Petrovych
Назва патенту російськоюСпособ позиционирования грузов на авто- и электропогрузчиках и устройство для его осуществления
Автори російськоюКозлинский Мирослав Петрович
МПК / Мітки
МПК: B66F 9/06
Мітки: позиціювання, вантажів, електронавантажувачах, здійснення, спосіб, авто, пристрій
Код посилання
<a href="https://ua.patents.su/3-54893-sposib-poziciyuvannya-vantazhiv-na-avto-i-elektronavantazhuvachakh-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб позиціювання вантажів на авто- і електронавантажувачах і пристрій для його здійснення</a>
Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17826
Опубліковано: 03.06.1997
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: довгомірних, спосіб, позиціювання, здійснення, вантажів, пристрій
Формула / Реферат:
1. Спосіб позиціювання довгомірних вантажів, при якому піднімають вантаж, захоплюють його гаками двотаврової балки, позиціонують, вирівнюючи в ряд, який відрізняється тим, що позиціювання здійснюють шляхом врівноважування.2. Спосіб позиціювання за п. 1, який відрізняється тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму.3. Пристрій для позиціювання довго-мірних...
Спосіб рівномірного завантаження вил авто- і електронавантажувачів і пристрій для його здійснення
Номер патенту: 50324
Опубліковано: 15.10.2002
Автори: Гутий Андрій Володимирович, Мальнов Сергій Іванович, Костюк Володимир Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: авто, здійснення, електронавантажувачів, рівномірного, спосіб, завантаження, віл, пристрій
Формула / Реферат:
1. Спосіб рівномірного завантаження вил авто- і електронавантажувачів, згідно якого вантаж захоплюють, рівномірно завантажують вила, який відрізняється тим, що визначають різницю напружень в стійках вил і врівноважують завантаження боковим переміщенням більш завантаженої частини вил.2. Пристрій для рівномірного завантаження вил авто- і електронавантажувачів, який містить каретку вертикального переміщення, на якій встановлені вила, який...
Спосіб позиціювання вантажів і пристрій для його здійснення
Номер патенту: 22864
Опубліковано: 05.05.1998
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: пристрій, здійснення, спосіб, вантажів, позиціювання
Формула / Реферат:
1. Способ позиционирования грузов, при котором груз захватывают, позиционируют, выравнивая в ряд на грузовой каретке, перемещаемой с помощью цепи, отличающийся тем, что позиционирование осуществляют с помощью уравновешивания, определив наличие разности напряжений в цепях перемещения каретки.2 Устройство для позиционирования грузов, которое содержит грузоподъемную несущую раму, установленную в ней с возможностью вертикального...
Спосіб центрування довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17486
Опубліковано: 06.05.1997
Автори: Коровець Ігор Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: пристрій, центрування, спосіб, здійснення, вантажів, довгомірних
Формула / Реферат:
1. Спосіб центрування довгомірних вантажів, який включає в себе взяття вантажу на вила, нахил його на каретку, пересування вантажу до суміщення центру ваги вантажу з поздовжньою віссю захвату, який відрізняється тим, що навантаження, яке діє на каретку, передають на вертикально розміщені вали.2. Пристрій для центрування довгомірних вантажів, який має пару вил круглого січення, змонтованих на каретці навантажувача з можливістю...
Спосіб перевантаження діамагнітних вантажів та пристрій для його здійснення
Номер патенту: 11256
Опубліковано: 25.12.1996
Автори: Іонін Сергей Петрович, Орлов Ігорь Борісовіч, Олевич Павло Васильович, Венско Олег Ігоревич, Збаращенко Віталій Стефановіч, Нунупаров Сергій Мартинович
МПК: B66C 1/00
Мітки: здійснення, вантажів, спосіб, діамагнітних, перевантаження, пристрій
Формула / Реферат:
(57) 1. Способ перегрузки диамагнитных грузов с применением захвата на постоянных магнитах, заключающийся в том, что захват наводят на груз, подают импульс тока в катушку управления магнитом захвата, транспортируют груз вместе с захватом грузоподъемным средством и освобождают груз путем подачи импульса тока обратной полярности, отличающийся тем, что перед наведением захвата на грузе устанавливают грузонесущее средство с магнитом в центральной...
Попередній патент: Склад для передпосівної обробки насіння озимої пшениці
Наступний патент: Проміжне рейкове скріплення
Випадковий патент: Похідні бензимідазолу як інгібітори фактора ха