Спосіб позиціювання вантажів і пристрій для його здійснення
Номер патенту: 22864
Опубліковано: 05.05.1998
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
Формула / Реферат
1. Способ позиционирования грузов, при котором груз захватывают, позиционируют, выравнивая в ряд на грузовой каретке, перемещаемой с помощью цепи, отличающийся тем, что позиционирование осуществляют с помощью уравновешивания, определив наличие разности напряжений в цепях перемещения каретки.
2 Устройство для позиционирования грузов, которое содержит грузоподъемную несущую раму, установленную в ней с возможностью вертикального перемещения с помощью цепей грузовую каретку, на которой установлена каретка поперечных перемещений, отличающееся тем, что на цепях установлены датчики механических напряжений.
Текст
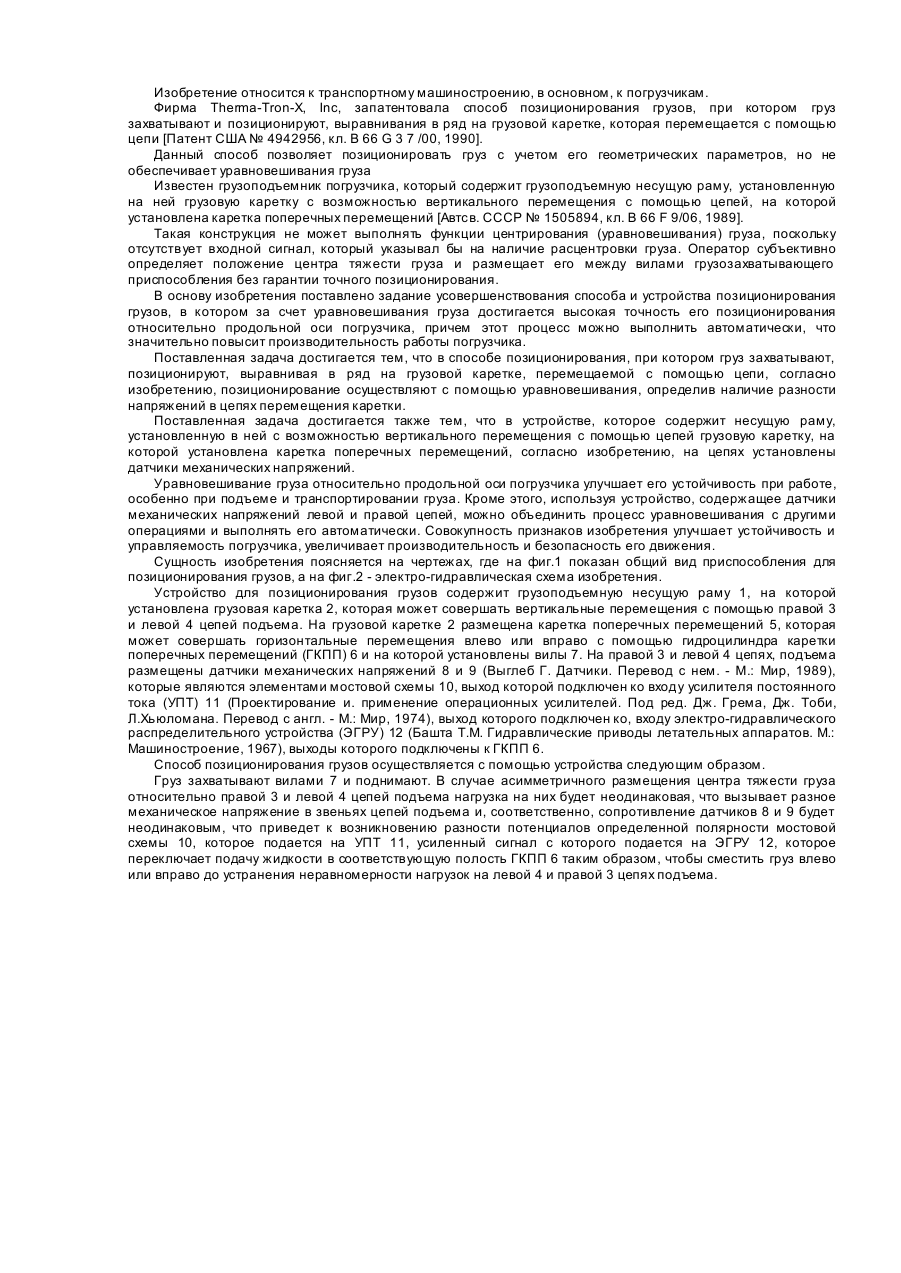
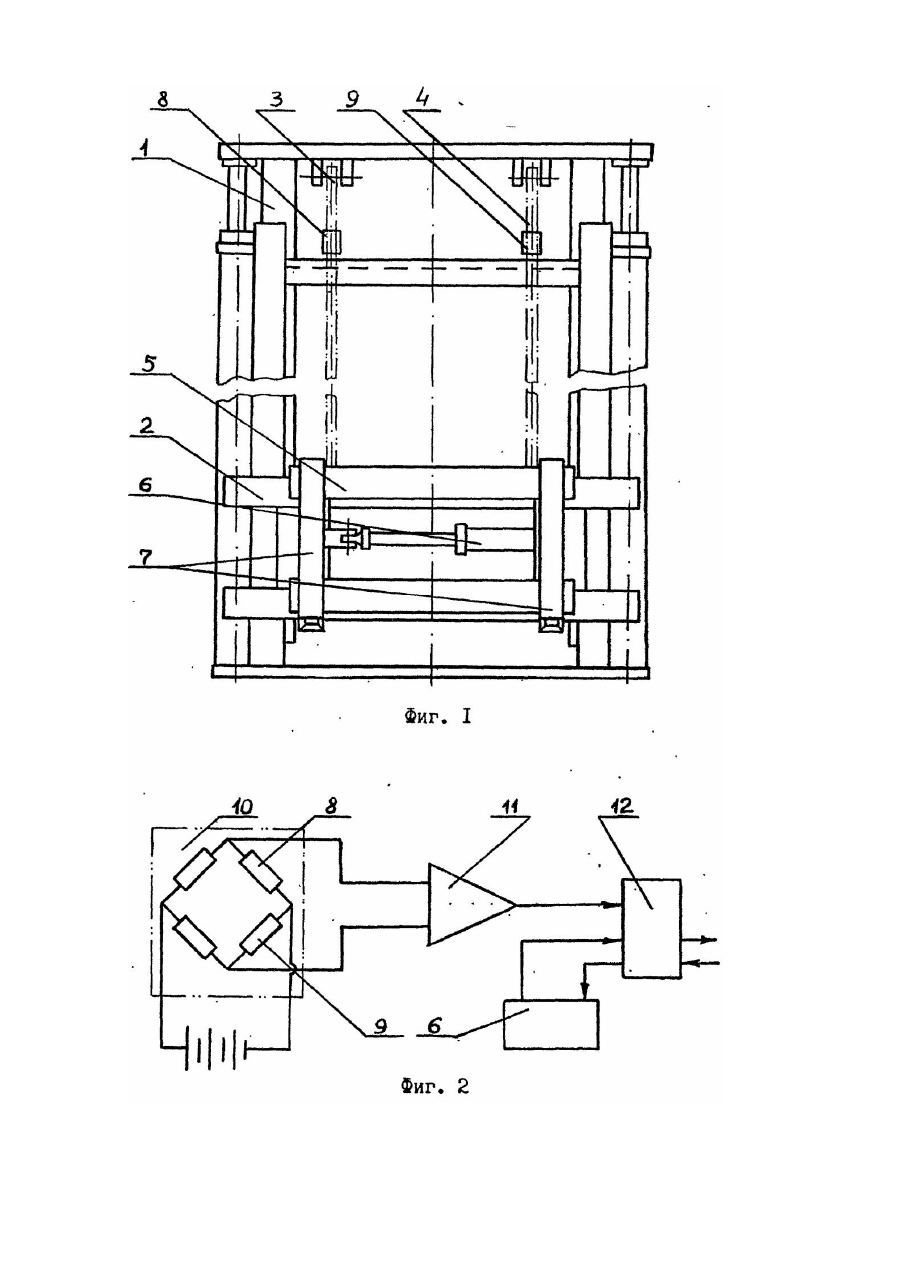
Изобретение относится к транспортному машиностроению, в основном, к погрузчикам. Фирма Therma-Tron-X, Inc, запатентовала способ позиционирования грузов, при котором груз захватывают и позиционируют, выравнивания в ряд на грузовой каретке, которая перемещается с помощью цепи [Патент США № 4942956, кл. В 66 G 3 7 /00, 1990]. Данный способ позволяет позиционировать груз с учетом его геометрических параметров, но не обеспечивает уравновешивания груза Известен грузоподъемник погрузчика, который содержит грузоподъемную несущую раму, установленную на ней грузовую каретку с возможностью вертикального перемещения с помощью цепей, на которой установлена каретка поперечных перемещений [Автсв. СССР № 1505894, кл. В 66 F 9/06, 1989]. Такая конструкция не может выполнять функции центрирования (уравновешивания) груза, поскольку отсутствует входной сигнал, который указывал бы на наличие расцентровки груза. Оператор субъективно определяет положение центра тяжести груза и размещает его между вилами грузозахватывающего приспособления без гарантии точного позиционирования. В основу изобретения поставлено задание усовершенствования способа и устройства позиционирования грузов, в котором за счет уравновешивания груза достигается высокая точность его позиционирования относительно продольной оси погрузчика, причем этот процесс можно выполнить автоматически, что значительно повысит производительность работы погрузчика. Поставленная задача достигается тем, что в способе позиционирования, при котором груз захватывают, позиционируют, выравнивая в ряд на грузовой каретке, перемещаемой с помощью цепи, согласно изобретению, позиционирование осуществляют с помощью уравновешивания, определив наличие разности напряжений в цепях перемещения каретки. Поставленная задача достигается также тем, что в устройстве, которое содержит несущую раму, установленную в ней с возможностью вертикального перемещения с помощью цепей грузовую каретку, на которой установлена каретка поперечных перемещений, согласно изобретению, на цепях установлены датчики механических напряжений. Уравновешивание груза относительно продольной оси погрузчика улучшает его устойчивость при работе, особенно при подъеме и транспортировании груза. Кроме этого, используя устройство, содержащее датчики механических напряжений левой и правой цепей, можно объединить процесс уравновешивания с другими операциями и выполнять его автоматически. Совокупность признаков изобретения улучшает устойчивость и управляемость погрузчика, увеличивает производительность и безопасность его движения. Сущность изобретения поясняется на чертежах, где на фиг.1 показан общий вид приспособления для позиционирования грузов, а на фиг.2 - электро-гидравлическая схема изобретения. Устройство для позиционирования грузов содержит грузоподъемную несущую раму 1, на которой установлена грузовая каретка 2, которая может совершать вертикальные перемещения с помощью правой 3 и левой 4 цепей подъема. На грузовой каретке 2 размещена каретка поперечных перемещений 5, которая может совершать горизонтальные перемещения влево или вправо с помощью гидроцилиндра каретки поперечных перемещений (ГКПП) 6 и на которой установлены вилы 7. На правой 3 и левой 4 цепях, подъема размещены датчики механических напряжений 8 и 9 (Выглеб Г. Датчики. Перевод с нем. - М.: Мир, 1989), которые являются элементами мостовой схемы 10, выход которой подключен ко входу усилителя постоянного тока (УПТ) 11 (Проектирование и. применение операционных усилителей. Под ред. Дж. Грема, Дж. Тоби, Л.Хьюломана. Перевод с англ. - М.: Мир, 1974), выход которого подключен ко, входу электро-гидравлического распределительного устройства (ЭГРУ) 12 (Башта Т.М. Гидравлические приводы летательных аппаратов. М.: Машиностроение, 1967), выходы которого подключены к ГКПП 6. Способ позиционирования грузов осуществляется с помощью устройства следующим образом. Груз захватывают вилами 7 и поднимают. В случае асимметричного размещения центра тяжести груза относительно правой 3 и левой 4 цепей подъема нагрузка на них будет неодинаковая, что вызывает разное механическое напряжение в звеньях цепей подъема и, соответственно, сопротивление датчиков 8 и 9 будет неодинаковым, что приведет к возникновению разности потенциалов определенной полярности мостовой схемы 10, которое подается на УПТ 11, усиленный сигнал с которого подается на ЭГРУ 12, которое переключает подачу жидкости в соответствующую полость ГКПП 6 таким образом, чтобы сместить груз влево или вправо до устранения неравномерности нагрузок на левой 4 и правой 3 цепях подъема.
ДивитисяДодаткова інформація
Автори англійськоюKozlynskyi Myroslav Petrovych, Zinko Roman Volodymyrovych
Автори російськоюКозлинский Мирослав Петрович, Зинько Роман Владимирович
МПК / Мітки
МПК: B66F 9/06
Мітки: здійснення, вантажів, позиціювання, спосіб, пристрій
Код посилання
<a href="https://ua.patents.su/2-22864-sposib-poziciyuvannya-vantazhiv-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб позиціювання вантажів і пристрій для його здійснення</a>
Спосіб перевантаження діамагнітних вантажів та пристрій для його здійснення
Номер патенту: 11256
Опубліковано: 25.12.1996
Автори: Нунупаров Сергій Мартинович, Олевич Павло Васильович, Іонін Сергей Петрович, Орлов Ігорь Борісовіч, Венско Олег Ігоревич, Збаращенко Віталій Стефановіч
МПК: B66C 1/00
Мітки: здійснення, вантажів, спосіб, діамагнітних, перевантаження, пристрій
Формула / Реферат:
(57) 1. Способ перегрузки диамагнитных грузов с применением захвата на постоянных магнитах, заключающийся в том, что захват наводят на груз, подают импульс тока в катушку управления магнитом захвата, транспортируют груз вместе с захватом грузоподъемным средством и освобождают груз путем подачи импульса тока обратной полярности, отличающийся тем, что перед наведением захвата на грузе устанавливают грузонесущее средство с магнитом в центральной...
Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17826
Опубліковано: 03.06.1997
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: пристрій, вантажів, здійснення, спосіб, довгомірних, позиціювання
Формула / Реферат:
1. Спосіб позиціювання довгомірних вантажів, при якому піднімають вантаж, захоплюють його гаками двотаврової балки, позиціонують, вирівнюючи в ряд, який відрізняється тим, що позиціювання здійснюють шляхом врівноважування.2. Спосіб позиціювання за п. 1, який відрізняється тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму.3. Пристрій для позиціювання довго-мірних...
Пристрій для кріплення великогабаритних вантажів на платформі транспортного засобу
Номер патенту: 4601
Опубліковано: 28.12.1994
Автори: Завгородній Іван Павлович, Шінкарєнко Владімір Ніколаєвіч, Малов Арнольд Дмітрієвіч, Лавренов Борис Миколайович
МПК: B60P 7/06
Мітки: транспортного, засобу, пристрій, кріплення, платформи, великогабаритних, вантажів
Формула / Реферат:
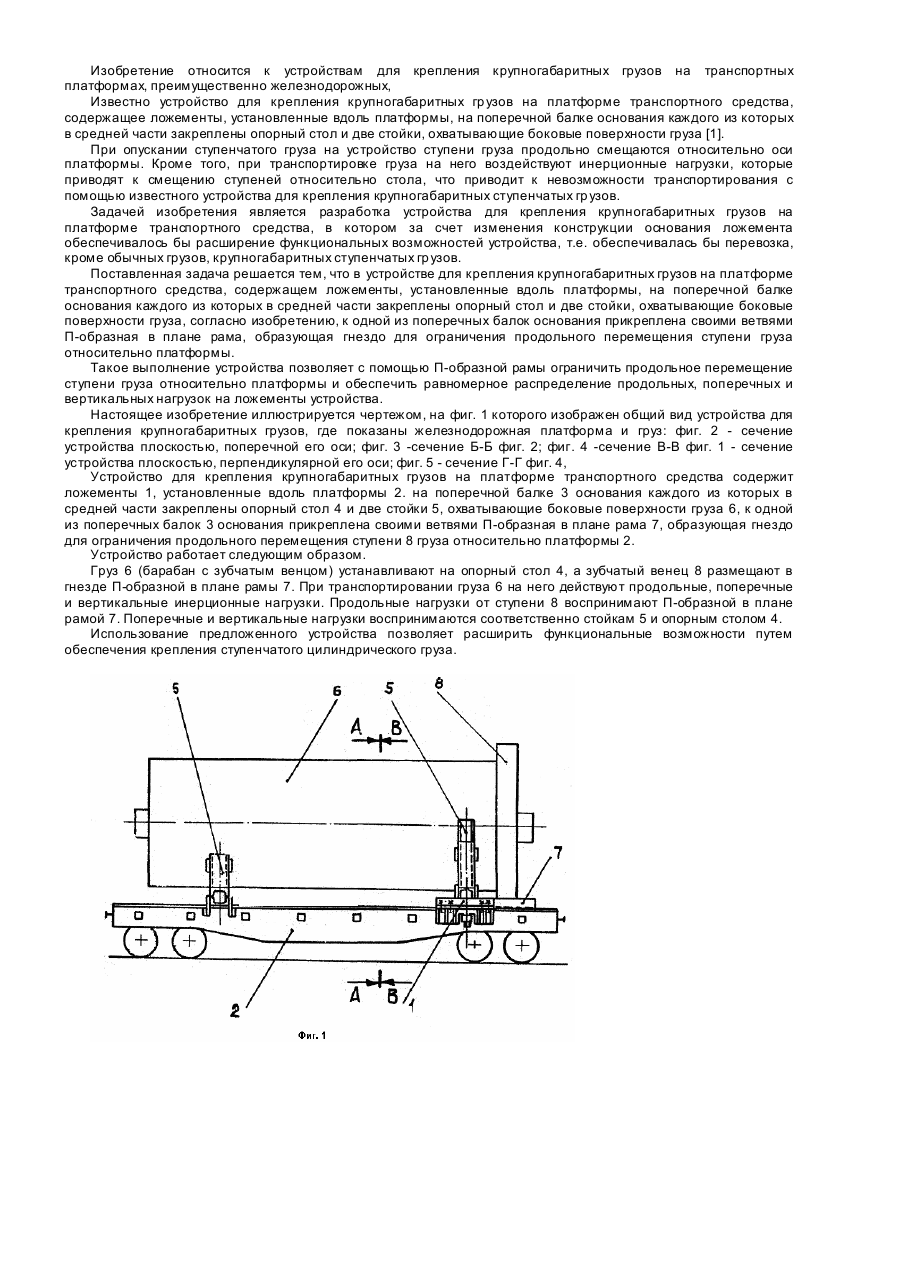
Устройство для крепления крупногабаритных грузов на платформе транспортного средства, содержащее ложементы, установленные вдоль платформы, на поперечной балке основания каждого из которых в средней части закреплены опорный стол и две стойки, охватывающие боковые поверхности груза, отличающееся тем, что к одной из поперечных балок основания прикреплена своими ветвями П-образная в плане рама, образующая гнездо для ограничения продольного...
Пристрій для навантаження і розвантаження циліндричних вантажів з транспортних засобів
Номер патенту: 11452
Опубліковано: 25.12.1996
Автор: Прокопенко Володимир Вікторович
МПК: B65G 67/02
Мітки: розвантаження, навантаження, вантажів, засобів, циліндричних, пристрій, транспортних
Формула / Реферат:
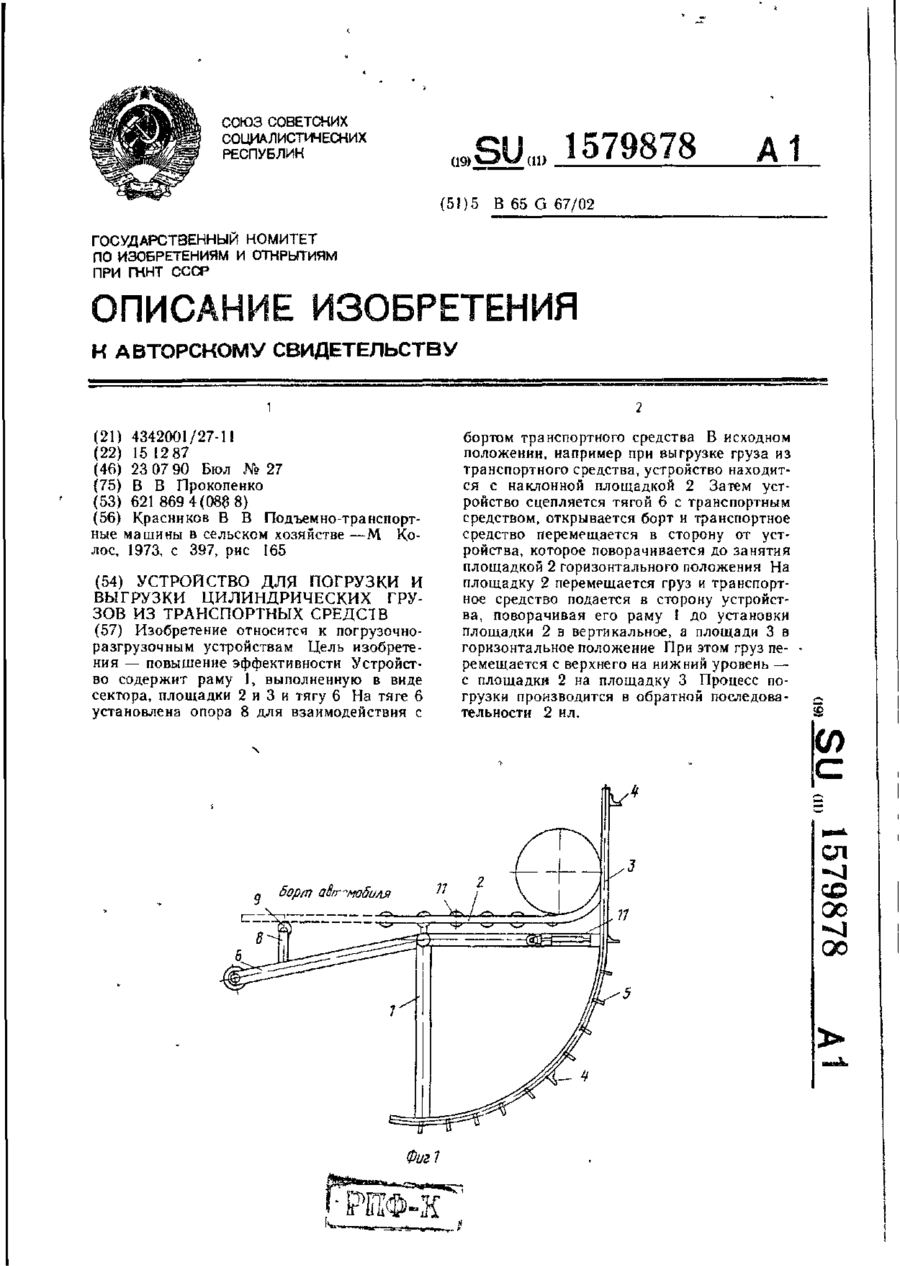
Устройство для погрузки и выгрузки цилиндрических грузов из транспортных средств, содержащее раму в виде сектора поворота в вертикальной плоскости, размещенные на раме по меньшей мере две площадки для установки и перемещения груза, одна из которых расположена по касательной к криволинейной поверхности сектора, а другая - в радиальной плоскости, и шарниром связанную с рамой тягу для взаимодействия с транспортным средством, отличающееся тем,...
Спосіб центрування довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17486
Опубліковано: 06.05.1997
Автори: Козлинський Мирослав Петрович, Коровець Ігор Володимирович
МПК: B66F 9/06
Мітки: спосіб, здійснення, центрування, довгомірних, пристрій, вантажів
Формула / Реферат:
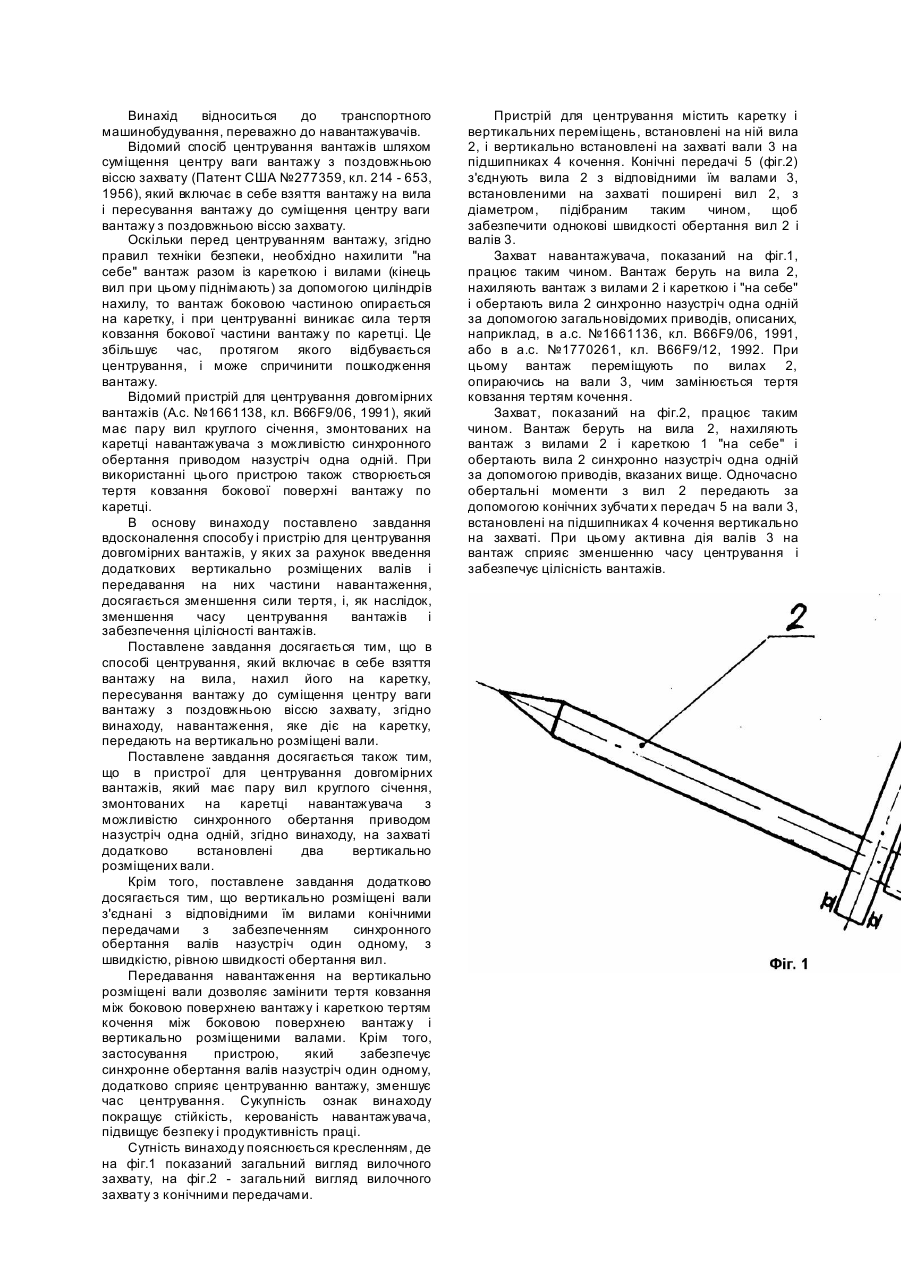
1. Спосіб центрування довгомірних вантажів, який включає в себе взяття вантажу на вила, нахил його на каретку, пересування вантажу до суміщення центру ваги вантажу з поздовжньою віссю захвату, який відрізняється тим, що навантаження, яке діє на каретку, передають на вертикально розміщені вали.2. Пристрій для центрування довгомірних вантажів, який має пару вил круглого січення, змонтованих на каретці навантажувача з можливістю...
Попередній патент: Спосіб вибухового відбою гірничих порід
Наступний патент: Спосіб очищення стічних вод від органічних домішок
Випадковий патент: Стенд для випробувань на втому гальмівного важеля