Спосіб управління бортовою апаратурою космічного апарата
Номер патенту: 54977
Опубліковано: 25.11.2010
Автори: Загорулько Олександр Миколайович, Загорулько Євгенія Олександрівна, Махонін Євгеній Іванович

Формула / Реферат
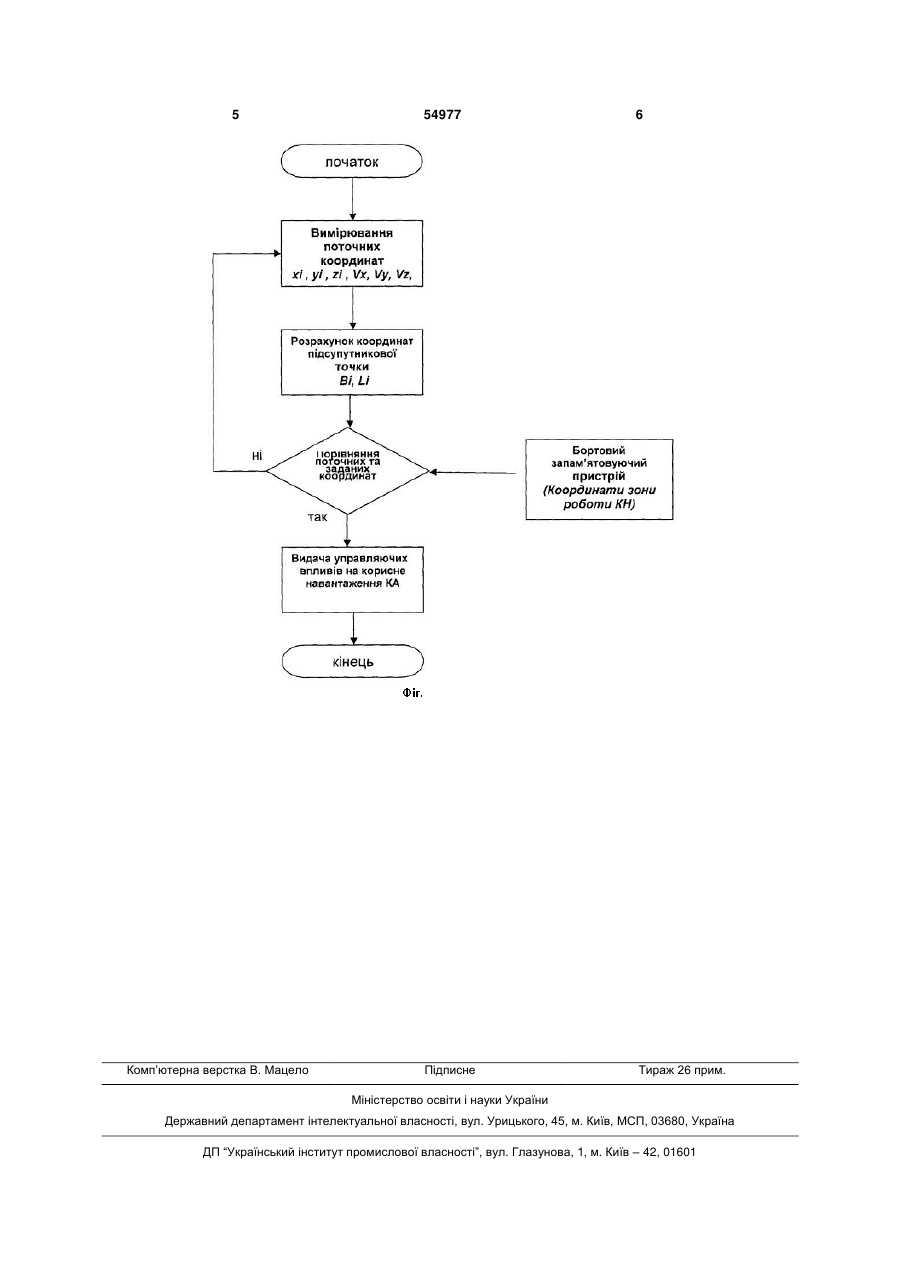
Спосіб управління бортовою апаратурою космічного апарата, який полягає в тому, що моменти вмикання (вимикання) апаратури відбуваються при досягненні трасою польоту (підсупутниковою точкою орбіти КА) координат початку (кінця) зони роботи корисного навантаження, заздалегідь записаних в бортовий запам'ятовуючий пристрій, який відрізняється тим, що використовуються поточні дані про рух КА в Гринвіцькій системі координат, які формуються апаратурою супутникової навігації, та просторові координати зони роботи корисного навантаження.
Текст
Спосіб управління бортовою апаратурою космічного апарата, який полягає в тому, що моменти 3 54977 (АСН), яка використовує сигнали глобальних космічних навігаційних систем «Глонасс» та GPS. При цьому перевагу мають ті, які використовують сигнали обох систем: при пропаданні сигналів якої не будь навігаційної системи або неможливості її використання вони автоматично продовжують роботу по іншій космічній навігаційній системі [6]. Вихідною інформацією АСН є: поточні координати КА (в Гринвіцькій системі координат) хі, уі, zі, складові вектору швидкості Vхі, Vyі, Vzі, поточні значення часу (UTC). За даними АСН бортовим обчислювальним пристроєм проводиться розрахунок траси польоту (координат підсупутникової точки). Розрахунок координат підсупутникової точки залежить від вибраної моделі поверхні Землі. Вони можуть бути: 1). геоцентричними (t) і (t) якщо Земля має форму шару; 2). геодезичними L(t) і В(t), якщо в якості моделі Землі використовується еліпсоїд (Красовського чи загальноземний); 3). географічними (t) і (t), якщо моделлю Землі є геоїд. Для геодезичних координат співвідношення поточних координат КА (в Грінвічській системі координат) хі, уі, zi, з геодезическими L(t) i B(t) будуть мати вигляд: zi B arctg (рад). 2 2 2 xi yi * 1 L L yi xi L L 2 ;x 0 y 0 yi2 arctg L ;x 0 zi2 H=R-RЭЛ xi2 R RЭЛ 2 aЭЛ * 1 еЭЛ 1 e2 * cos2 arctg 1 e2 * sin B cos B Ефективність вибраної моделі Землі (або системи координат) повинна бути направлена на досягнення максимальної швидкодії при рішенні задачі бортовою ЕОМ з необхідною точністю. При цьому способі моменти вмикання (вимикання) бортової апаратури КА виконуються при умові відповідності (відмінності на величину менше допустимої) поточних координат підсупутникової точки КА, які обраховані за даними АСН, з просторовими (координатними) складовими зони 4 роботи корисного навантаження, заздалегідь записаними в бортовий запам'ятовуючий пристрій (фіг.). В цьому випадку часові похибки вмикання (вимикання) корисного навантаження визначаються лише похибками бортової навігаційної апаратури, які можливо представити виразом: T x2 y2 2 Vx 2 Vy z2 2 Vz Для навколополярних (сонячно-синхронних) орбіт похибка часу виходу на екватор може бути визначена по спрощеній формулі: Z TЭ Vz Vz На практиці для орбіт вітчизняних КА ці похибки не перевищують 0,1 с, що на порядок менше, ніж похибки при прогнозуванні [4-6]. Реалізація запропонованої корисної моделі дозволяє забезпечити виконання корисним навантаженням цільових завдань КА в заданій точці простору з більшою, ніжу відомому способі управління точністю при спрощенні процедури технічної реалізації та скоротити обсяг інформації, що передається на борт КА для управління бортовою апаратурою. Алгоритм роботи бортової системи управління для запропонованого способу представлений на фіг. 1. Перелік посилань. 1. Космические радиотехнические комплексы / Под общ. редакцией Г.В. Стогова - М.: МО СССР, 1986 - 626 с. 2. Застосування космічних систем для забезпечення дій збройних сил:Навчальний посібник / за ред. В.І. Ткаченка - X.: ХВУ, 2001 - 192 с. 3. Глазов Б.И. Автоматизация управления средствами и частями полигонных и космических комплексов - М.: МО СССР, 1988 - 326 с. 4. Організація системи управління космічними засобами в умовах однопунктної технології / СТ. Черепков, B.I. Богомья, О.М. Загорулько, С.Д. Ставицький: Навчальний посібник.- К.: НАОУ, 2005. 57 с. 5. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технологи: Збірник, наукових, праць. - X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005. - Вип. 32. - с. 8087. 6. Ефимов С.К., Нестерович А.Г., Яковченко А.И. Апаратура спутниковой навигации КА «Січ1М» и «Микроспутник. // Космічна наука і технологія. - 2001. - Т. 7, № 4. - с. 114-116. 5 Комп’ютерна верстка В. Мацело 54977 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of onboard equipment of spacecraft
Автори англійськоюZahorulko Oleksandr Mykolaiovych, Makhonin Yevhenii Ivanovych, Zahorulko Yevhenia Oleksandrivna
Назва патенту російськоюСпособ управления бортовой аппаратурой космического аппарата
Автори російськоюЗагорулько Александр Николаевич, Махонин Евгений Иванович, Загорулько Евгения Александровна
МПК / Мітки
МПК: B64G 1/24
Мітки: управління, спосіб, апаратурою, апарата, космічного, бортовою
Код посилання
<a href="https://ua.patents.su/3-54977-sposib-upravlinnya-bortovoyu-aparaturoyu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління бортовою апаратурою космічного апарата</a>
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Пархоменко Юлія Анатоліївна, Гавриленко Олег Іванович, Мирна Олена Володимирівна, Лученко Олег Олексійович
МПК: B64G 1/28
Мітки: спосіб, орієнтацією, управління, апарата, космічного, відмовостійкого, активного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 51673
Опубліковано: 26.07.2010
Автори: Кучерук Сергій Михайлович, Ян Ке, Козелкова Катерина Сергіївна, Загорулько Олександр Миколайович, Костенко Борис Олександрович
МПК: B64G 1/24
Мітки: космічного, спосіб, апарата, визначення, орієнтації
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата (КА), який полягає в тому, що параметри орієнтації КА відносно центра мас обраховують за інформацією вихідної потужності панелей сонячних батарей, пов'язаної з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої використовують сонячні батареї, розміщені в трьох ортогональних площинах.
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: спосіб, навігаційних, визначення, апарата, параметрів, космічного, поточних
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Система управління апаратурою
Номер патенту: 64685
Опубліковано: 16.02.2004
Автори: Тарашевський Владислав Станіславович, Саркісов Володимир Олександрович, Воронін Ігор Павлович, Лопатін Володимир Олексійович, Василевська Галина Олександрівна, Єрмолаєв Єналь Володимирович, Жихарєв Олексій Петрович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, Павленко Фелікс Омелянович, Ісаєнко Дмитро Юрійович
МПК: H04L 12/28, G05B 19/02
Мітки: управління, система, апаратурою
Формула / Реферат:
1. Система управління апаратурою, що містить базовий комп'ютеризований пункт керування (ПК), по лініях комп'ютерної мережі, зв'язаний із пристроєм прийому команд і адресної видачі керуючих сигналів виконавчим механізмам апаратури, яка відрізняється тим, що система містить, з урахуванням специфіки трубопровідного транспорту в газовій промисловості, пристрої базових контрольованих пунктів (КП), а також вузол обліку витрати газу, зв'язані по...
Спосіб орієнтації сонячних батарей космічного апарата на сонце
Номер патенту: 51710
Опубліковано: 26.07.2010
Автори: Загорулько Олександр Миколайович, Ян Ке, Костенко Борис Олександрович, Кучерук Сергій Михайлович, Козелкова Катерина Сергіївна
МПК: B64G 1/24
Мітки: батарей, сонце, апарата, космічного, спосіб, орієнтації, сонячних
Формула / Реферат:
Спосіб орієнтації сонячних батарей космічного апарата на Сонце, який полягає в тому, що для підвищення енергозабезпечення бортової апаратури КА панелі сонячних батарей орієнтуються на Сонце, який відрізняється тим, що використовується апріорна інформація про напрям на Сонце, яка записується в бортовому запам'ятовуючому пристрої та коригується у міру необхідності.
Попередній патент: Установник ракети
Наступний патент: Пристрій для видобутку сірководню з морської води
Випадковий патент: Зонд для інтрагастрального піноутворення