Спосіб управління наземними антенними системами космічних радіоліній
Формула / Реферат
1. Спосіб управління наземними антенними системами космічних радіоліній, який полягає в тому, що приймальним пристроєм разом з телеметричною, службовою, спеціальною та іншою інформацією, що формується на борту космічного апарата (КА), приймають інформацію апаратури супутникової навігації, що містить дані про поточні параметри руху КА у Грінвіцькій системі координат (X, У, Z, Vx, Vy, Vz, t), за якими за допомогою обчислювального пристрою перераховують параметри руху КА у вимірювальну систему координат пункту прийому та кути напряму на КА (азимут та кут місця), проводять розрахунок наступного місцезнаходження КА по заданій моделі руху та формують управляючі поворотним пристроєм сигнали азимуту ![]() та кута місця
та кута місця ![]() , який відрізняється тим, що використовують реальну поточну інформацію про рух КА, що формується апаратурою супутникової навігації за даними космічних навігаційних систем GPS та/або ГЛОНАСС.
, який відрізняється тим, що використовують реальну поточну інформацію про рух КА, що формується апаратурою супутникової навігації за даними космічних навігаційних систем GPS та/або ГЛОНАСС.
2. Пристрій для управління антенними системами космічних радіоліній, який містить приймач, що здійснює прийом в реальному часі змішаного інформаційного потоку з борту КА, пристрій виділення з цього потоку даних АСН, обчислювальний пристрій розрахунку та виводу управляючих сигналів азимуту ![]() та кута місця
та кута місця ![]() за поточними даними апаратури супутникової навігації та заданою моделлю руху КА, поворотний пристрій відпрацювання кутів управління антенною системою, які з'єднані послідовно.
за поточними даними апаратури супутникової навігації та заданою моделлю руху КА, поворотний пристрій відпрацювання кутів управління антенною системою, які з'єднані послідовно.
Текст
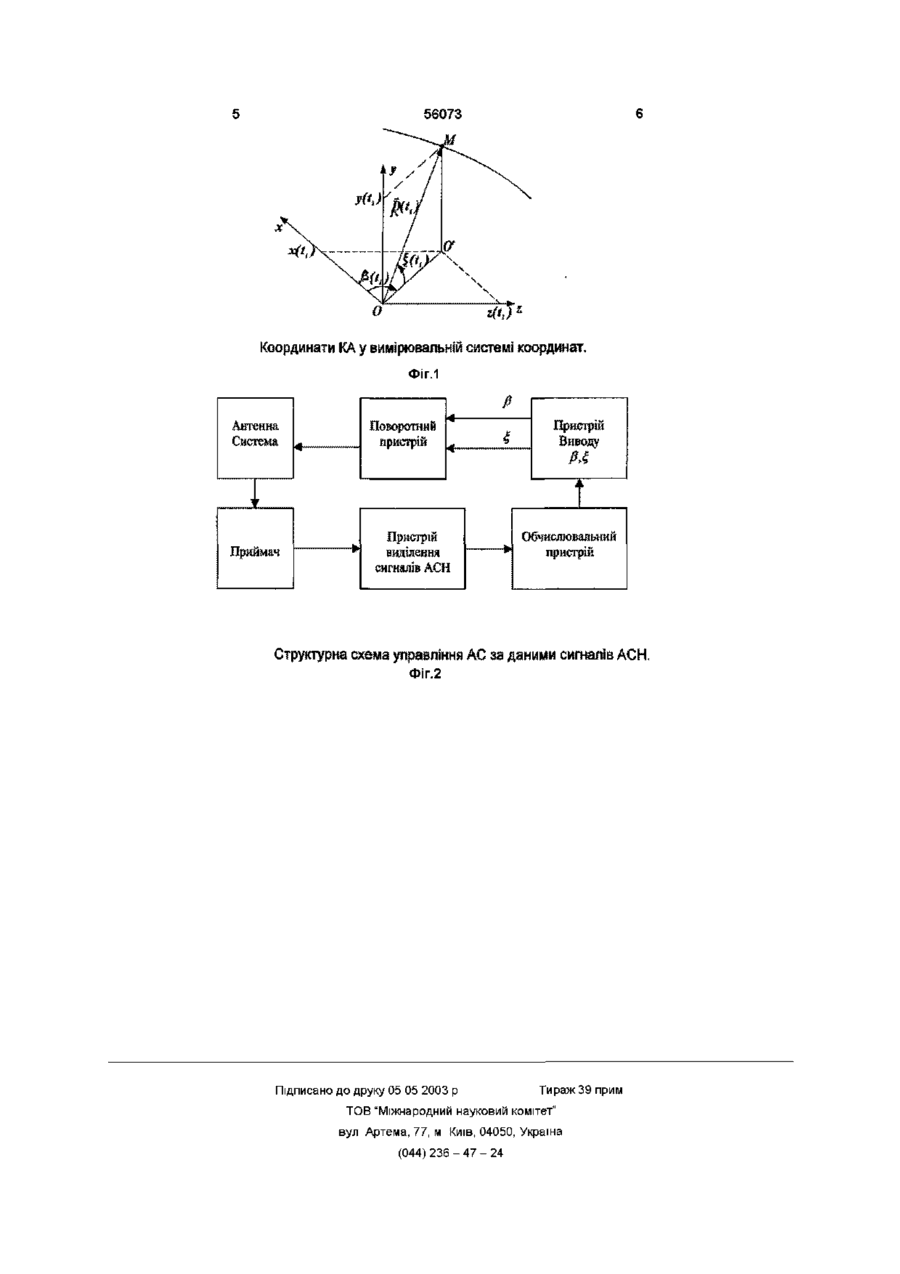
1 Спосіб управління наземними антенними системами космічних радіоліній, який полягає в тому, що приймальним пристроєм разом з телеметричною, службовою, спеціальною та іншою інформацією, що формується на борту космічного апарата (КА), приймають інформацію апаратури супутникової навігації, що містить дані про поточні параметри руху КА у Грінвіцькій системі координат (X, У, Z, Vx, Vy, Vz, t), за якими за допомогою обчислювального пристрою перераховують параметри руху КА у вимірювальну систему координат пункту прийому та кути напряму на КА (азимут та кут місця), проводять розрахунок наступного місцезнаходження КА по Пропонований винахід відноситься до області радіотехнічних засобів управління антенними системами, зокрема, до наземних космічних радіоліній і може бути використаний для систем зв'язку з КА, що обладнані апаратурою супутникової навігації Відомий спосіб управління антенними системами космічних радіоліній полягяє в програмному управлінні [2], коли параметри руху КА апріорно ВІДОМІ Це дозволяє завчасно вираховувати траєкторію руху КА (прогнозувати закон зміни кутових координат за часом) Режим програмного управління полягає у здійсненні руху діаграми направленості антени за програмою згідно з законом руху КА При цьому управляючі сигнали опрацьовуються та формуються у реальному масштабі часу у програмному пристрої на основі апріорних даних про рух КА Недоліком відомого способу є низька точність програмного управління, тому цей спосіб застосовується, в основному, для антенних систем радіотехнічних комплексів, що працюють з КА дальнього космосу на відстані більш ніж 30000 км заданій моделі руху та формують управляючі поворотним пристроєм сигнали азимуту р та кута я к и и місця 4. відрізняється тим, що використовують реальну поточну інформацію про рух КА, що формується апаратурою супутникової навігації за даними космічних навігаційних систем GPS та/або ГЛОНАСС 2 Пристрій для управління антенними системами космічних радіоліній, який містить приймач, що здійснює прийом в реальному часі змішаного інформаційного потоку з борту КА, пристрій виділення з цього потоку даних АСН, обчислювальний пристрій розрахунку та виводу управляючих сигналів азимуту р та кута місця'%за поточними даними апаратури супутникової навігації та заданою моделлю руху КА, поворотний пристрій відпрацювання кутів управління антенною системою, які з'єднані послідовно Відомий також спосіб автосупроводження [2], що підрозділяється на системи, що працюють по рівносигнальному напрямові у режимі конічного сканування антенного променя, моноімпульсного типу та екстремальні системи Недоліками даного способу є розбіжність напряму діаграми направленості від напряму на КА, труднощі технічної реалізації Найбільш близьким до пропонованого технічним рішенням, обраним як прототип, є спосіб програмного управління [2] У основу винаходу покладено завдання створити спосіб управління антенними системами, який шляхом обробки інформації, що надходить на антену з бортових систем КА, дав можливість забезпечити високоточне наведення діаграми направленості на КА Для рішення поставленого завдання у способі управління антенними системами, який полягає у тому, що приймальний пристрій разом з телеметричною та іншою інформацією, що формується на борту КА, приймає інформацію апаратури супутникової навігації, що містить дані CO о (О Ю 56073 про параметри руху КА (X,Y,Z,Vx,Vy,Vz,T) у пункту прийому характеризується відносно Гринвіцькій системі координат, за якими малими кутовими швидкостями, або при малому обчислювальний пристрій обраховує додатково значенні At=t+i-t| (частому уточненні координат за параметри руху КА у вимірюваній системі даними АСН), нелінійного - при великих координат та кути напряму на КА (азимут та кут кутових швидкостях, великому значенні At У місця), а також вираховує положення КА на час першому випадку частину функції cp(t) між двома наступного обчислення координат за даними АСН сусідніми точками замінюють відрізком лінійної Наступна робота здійснюється, як і в пристроях функції, у другому - поліномом другого або програмного управління, шляхом інтерполяції На третього порядку фіг 1 зображено координати КА у вимірювальній Як приклад можна привести викорисану в системі координат, на фіг 2 - структурна схема універсальних пристроях програмного управління пристрою, що реалізує спосіб інтерполяцією за кубічним законом [4] 2 3 Сутність запропонованого способу полягає у q>(t) =a+bt+ct +dt де наступному дані АСН, що надходять з борту КА у cp(t) - поточний кут повороту антени Гринвіцькій системі координат xr(t,), yr(t,), zr(t,) у а=фнач - початкове значення кута, вимірювальній системі координат пункту прийому b-фнач - значення кутової швидкості на початку будуть [4] інтервалу інтерполяції x(t,) (ЗДф - 3(pAt) _ (2(pAt + ДфДІ - 2Дф У(М = A ВГ yr(t,) .Q — = . z(t,) zr(t,) де Авг - матриця переходу від Гринвіцької до вимірювальної системи координат Направляючі косинуси матриці обчислюються через величину кутів X і ф (довгота та широта пункту прийому), тому матриця Авг має вигляд -cosA-sincp -sinA-sincp coscp Авг = cosAxoscp sinAxoscp sincp -sin Я cjsA, 0 Нахильна відстань до КА обчислюється, як 2 2 2 R(t,) = x (t,) y (t,) z (t,) Напрям на КА, що рухається в зоні радюогляду пункту прийому визначається двома кутами (фіг 1) азимутом p(t,), обчисленим у площині місцевого горизонту пункту від напряму на ПІВНІЧ (позитивного напряму осі Ох) до проекції вектору нахильної відстані R(t,) на площину місцевого горизонту, кутом місця 4(t) між вектором нахильної відстані та його проекцією на площину місцевого горизонту 3 геометричних співвідношень виходить z(t.) P(t|) = arcsm2 2 /x (t,) z (t r ) y(t,) = arcsm R(t.)' де x(t), y(t), z(t) - проекції вектору нахильної відстані R(t) на осі вимірювальної системи координат (або координати КА в ВСК) Далі за поточним значенням координат КА і заданій моделі руху проводиться розрахунок місцезнаходження КА у вимірювальній системі координат на момент часу t,+1 (момент наступного розрахунку координат за даними АСН) Наступна робота здійснюється, як і у пристрої програмного управління, шляхом інтерполяції лінійної у разі роботи з КА, рух яких відносно де Дф - різниця кутів на початку та у КІНЦІ інтервалу інтерполяції Пропонований засіб може бути реалізовано за допомогою пристрою, структурна схема якого приведена на Фіг 2 пристрій містить приймач, що здійснює прийом в реальному часі змішаного інформаційного потоку з борту КА, пристрій виділення з цього потоку поточних сигналів апаратури супутникової навігації, обчислювальний пристрій, що реалізує вищезазначений спосіб, пристрій виводу азимуту p(t,) та кута місця £(t,) та поворотного пристрою, що відпрацьовує кути управління антенними системами Пропонований спосіб має наступні технічні переваги - забезпечується високоточне управління антенними системами по фактичній інформації про місцезнаходження КА, - спрощується система управління, - легка реалізація з використанням сучасної обчислювальної техніки та елементної бази Перелік посилань 1 Калашников Н И "Системы связи через ИСЗ", М «Связь», 1969 - 384стр 2 Невзоров В И , Титов Ю М «Антенные системы радиотехнических средств» Ленинград, ВИКИ им Можайского, 1987-107стр 3 Ефимов С К , Нестерович А Г , Яковченко А И «Аппаратура спутниковой навигации КА «Сич1М» и «Микроспутник»» «Космічна наука і технологія» 2001 Т7 №4 с 114-116 4 «Моделирование в радиолокации» (под ред Леонова А И ) М «Советское Радио», 1979264стр 56073 x(t, Координати КА у вимірювальній системі координат. Фіг.1 Антенна Система Приймач Поворотний пристрій Пристрій виділення сигналів АСН Пристрій Виводу Обчислювальний пристрій Структурна схема управління АС за даними сигналів АСН. Фіг.2 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling the ground antenna of a space radio communication link
Автори англійськоюZahorulko Oleksandr Mykolaiovych
Назва патенту російськоюСпособ управления наземной антенной линии космической радиосвязи
Автори російськоюЗагорулько Александр Николаевич
МПК / Мітки
МПК: H01Q 3/00
Мітки: антенними, системами, радіоліній, управління, наземними, спосіб, космічних
Код посилання
<a href="https://ua.patents.su/3-56073-sposib-upravlinnya-nazemnimi-antennimi-sistemami-kosmichnikh-radiolinijj.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління наземними антенними системами космічних радіоліній</a>
Спосіб оперативного управління системами передачі сигналів тривоги при надзвичайних ситуаціях
Номер патенту: 50693
Опубліковано: 15.10.2002
Автори: Кожушко Володимир Петрович, Ільмінський Олександр Миколайович, Зінков Євген Григорович
МПК: G08B 1/00, G08B 27/00
Мітки: спосіб, тривоги, сітуаціях, надзвичайних, системами, управління, оперативного, сигналів, передачі
Формула / Реферат:
Спосіб оперативного управління системами передачі сигналів тривоги при надзвичайних ситуаціях, що включають територіально розгалужену мережу сигнальних терміналів з кодуванням і модуляцією управляючих пакетів радіосигналів, який відрізняється тим, що пакети управляючих радіосигналів постачають даними, що містять код термінала і визначення тимчасового циклу сигналу тривоги.
Спосіб локації космічних об’єктів
Номер патенту: 32185
Опубліковано: 15.12.2000
Автор: Даник Юрій Григорович
МПК: G01S 3/78
Мітки: спосіб, космічних, об'єктів, локації
Текст:
...шумові зображення, які є одиночними (не мають на задашй відстані відповідного ім другого зображення), або не співпадають у парах за орієнтацією у просторі, розмірами і інтенсивністю. Рішення, що пропонується, дозволяє вирішити задачу зниження імовірностей помилкового виявлення об'єктів та їх невиявлення, шляхом зменшення впливу внутрішніх шумів приймача випромінювання за рахунок надання зображенням об'єктів, які спостерігаються таких...
Спосіб локації космічних об’єктів
Номер патенту: 31410
Опубліковано: 15.12.2000
Автори: Карпенко Владислав Володимирович, Семеншин Олександр Людвигович, Бабенко Володимир Володимирович
МПК: G01S 3/78
Мітки: локації, об'єктів, спосіб, космічних
Формула / Реферат:
Спосіб локації космічних об'єктів, який полягає у тому , що одержують зображення ділянки зоряного неба, у межах поля зору селектують космічний об'єкт на фоні зірок, визначають відхилення зображення космічного об’єкта від еталонної точки в полі зору, який відрізняється тим, що координату зображення еталонної точки знаходять як різницю між координатою, виміряною у площині зображення ділянки зоряного неба і екстрапольованою координатою...
Спосіб локації космічних об’єктів
Номер патенту: 29010
Опубліковано: 16.10.2000
Автори: Семеншин Олександр Людвигович, Даник Юрій Григорович, Карпенко Володимир Іванович, Бабенко Володимир Володимирович
МПК: G01S 3/78
Мітки: об'єктів, локації, спосіб, космічних
Формула / Реферат:
Споcіб локації космічних об'єктів, що полягає у тому, що одержують зображення ділянки зоряного неба, у межах поля зору селектують космічний об'єкт на фоні зірок, визначають відхилення зображення космічного об'єкта від еталонної точки в полі зору, який відрізняється тим, що визначають найкоротший шлях від зображення еталонної точки до зображення найближчої не еталонної точки, що знаходиться з нею у одній зоні ізопланатизму у напрямку на...
Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Бутенко Ольга Станіславівна, Деденок Віктор Петрович, Голкіна Валентина Василівна, Голкін Дмитро Васильович
МПК: G01S 5/00
Мітки: апаратів, навігаційних, визначення, спосіб, космічних, орбіт
Текст:
...Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1...
Попередній патент: Спосіб виробництва броньової сталі
Наступний патент: Адаптивний пристрій супроводу маневруючих цілей
Випадковий патент: Спосіб формування рудної шихти