Біротативний електропривід механізмів підйому крюкового крана та спосіб його експлуатації

Формула / Реферат
1. Біротативний електропривід механізмів підйому крюкового крана, який містить тихохідні вали редукторів, що з’єднані з валами барабанів механізмів головного та допоміжного підйомів, а на швидкохідних валах цих редукторів встановлені гальма, який відрізняється тим, що для приводу головного та допоміжного механізмів підйому використовують двигун подвійного обертання (ДПО), швидкохідний вал редуктора, тихохідний вал якого з’єднаний з валом барабана допоміжного механізму підйому, приводять в обертання валом зовнішнього ротора, а швидкохідний вал редуктора, тихохідний вал якого з’єднаний з валом барабана механізму головного підйому, приводять в обертання валом внутрішнього ротора ДПО.
2. Біротативний електропривід за п. 1, який відрізняється тим, що для підйому вантажів ![]() , де Qг - вантажність механізму головного підйому; Qв – вантажність механізму допоміжного підйому, необхідно виконання співвідношення
, де Qг - вантажність механізму головного підйому; Qв – вантажність механізму допоміжного підйому, необхідно виконання співвідношення ![]()
де ![]() і
і ![]() - діаметри барабанів механізмів допоміжного та головного підйомів;
- діаметри барабанів механізмів допоміжного та головного підйомів;
![]() ,
, ![]() - передаточні числа редукторів механізмів допоміжного та головного підйомів;
- передаточні числа редукторів механізмів допоміжного та головного підйомів;
![]() ,
, ![]() - кратність поліспастів механізмів допоміжного та головного підйомів.
- кратність поліспастів механізмів допоміжного та головного підйомів.
3. Спосіб експлуатації біротативного електроприводу механізмів підйому крюкового крана, що включає переміщення вантажів допоміжним або головним механізмом підйому, який відрізняється тим, що після включення ДПО в мережу у потрібному напрямку розгальмовується допоміжний або головний механізм підйому.
4. Спосіб експлуатації за п. 3, який відрізняється тим, що при переміщенні вантажів ![]() після включення ДПО в мережу одночасно розгальмовують вали як головного, так і допоміжного механізмів підйому.
після включення ДПО в мережу одночасно розгальмовують вали як головного, так і допоміжного механізмів підйому.
Текст
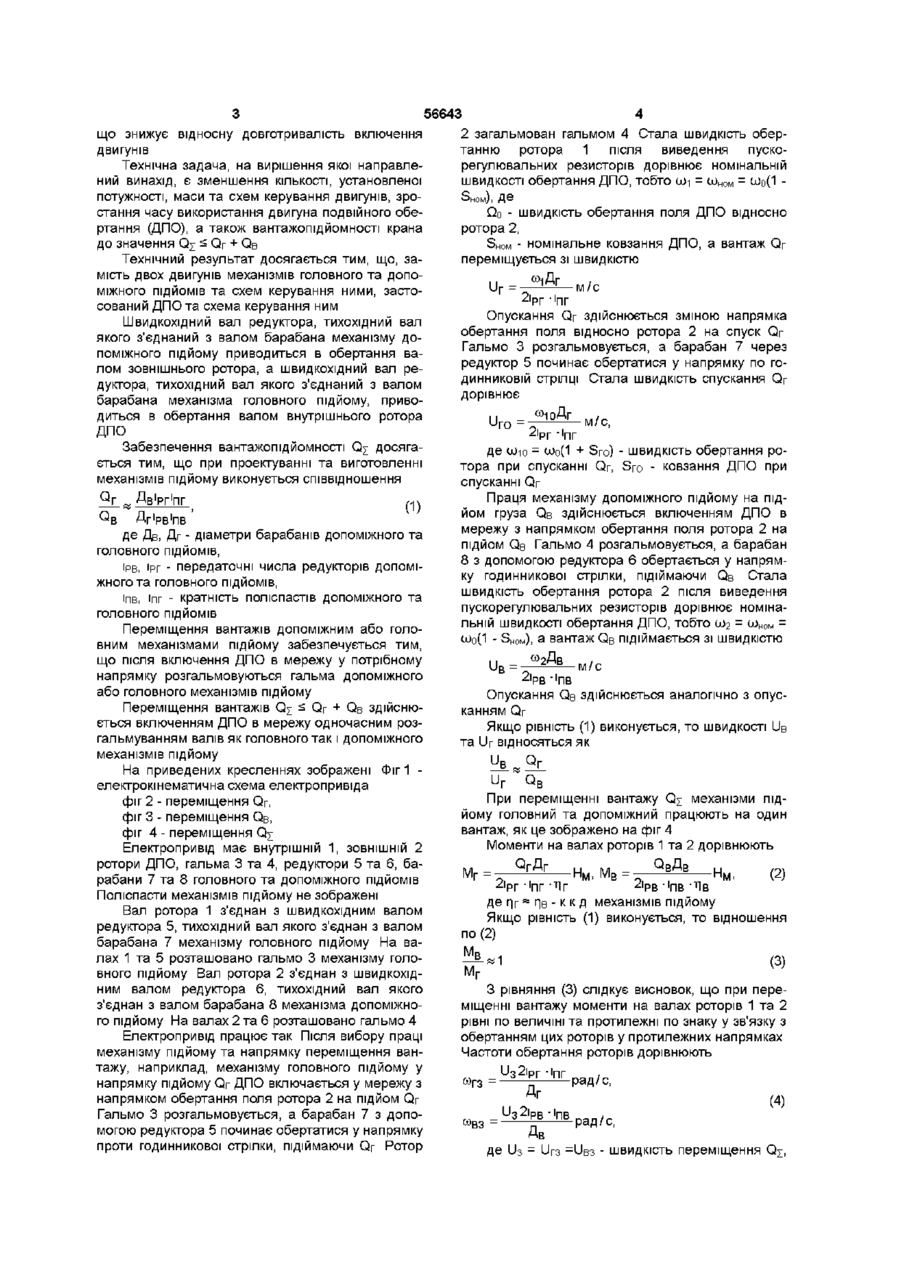
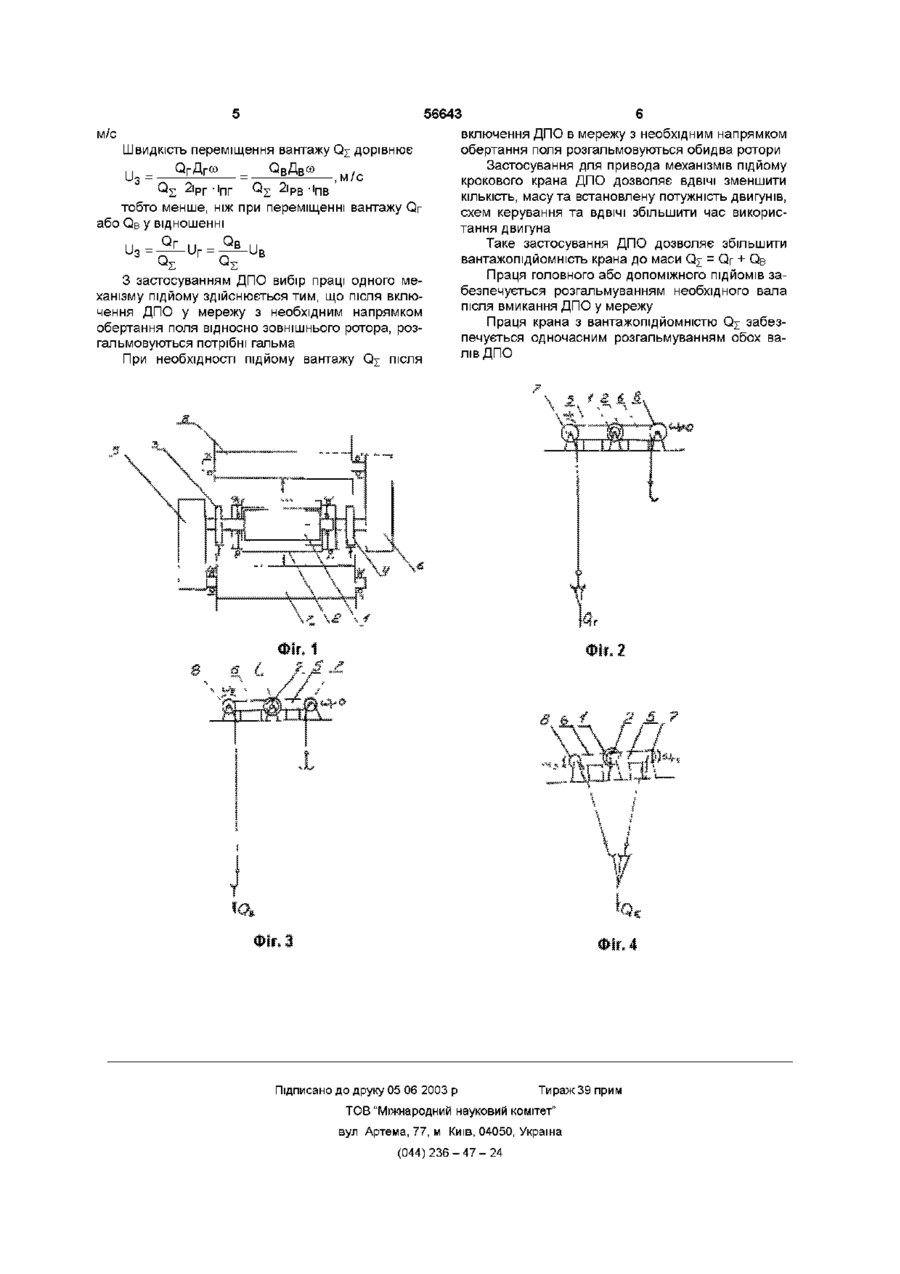
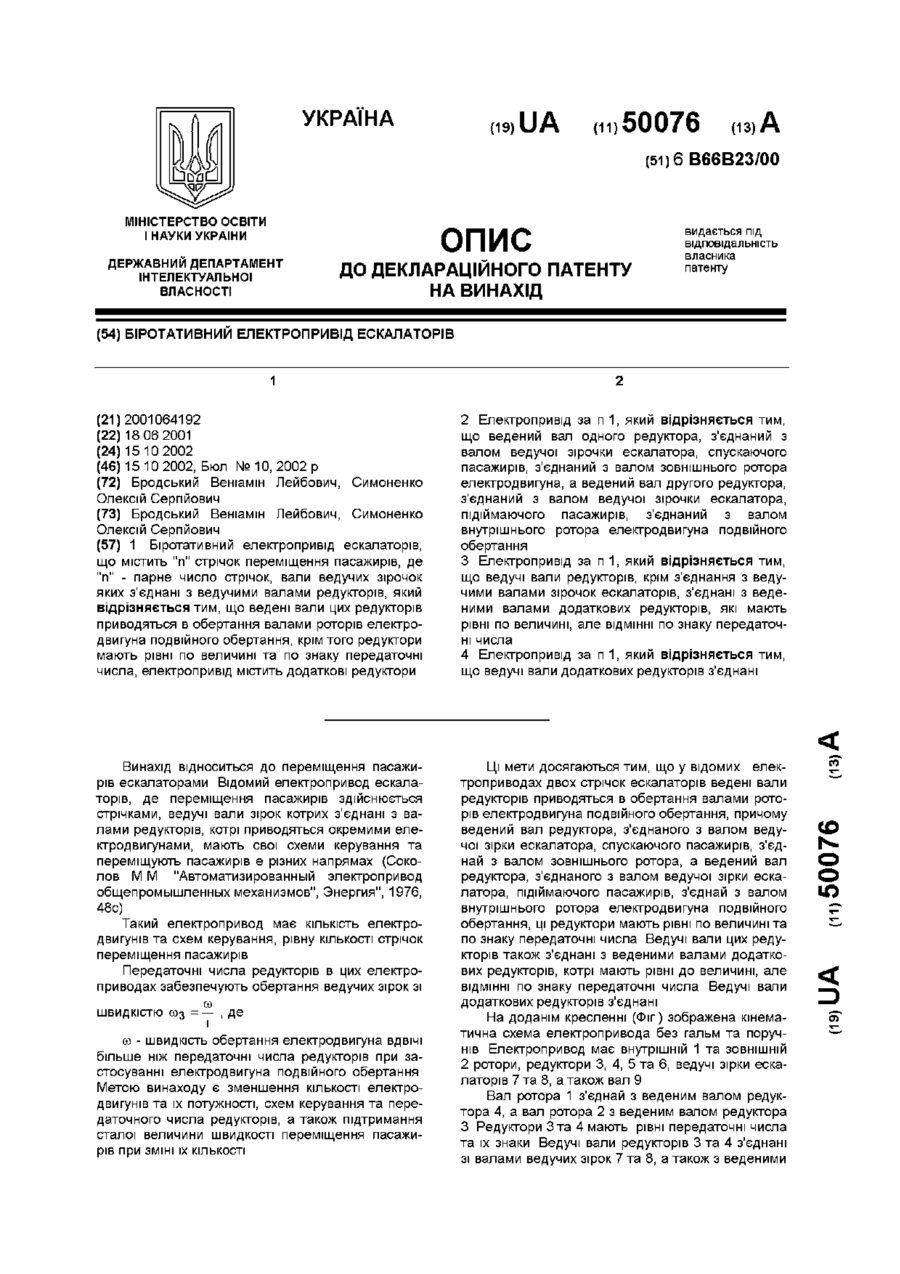
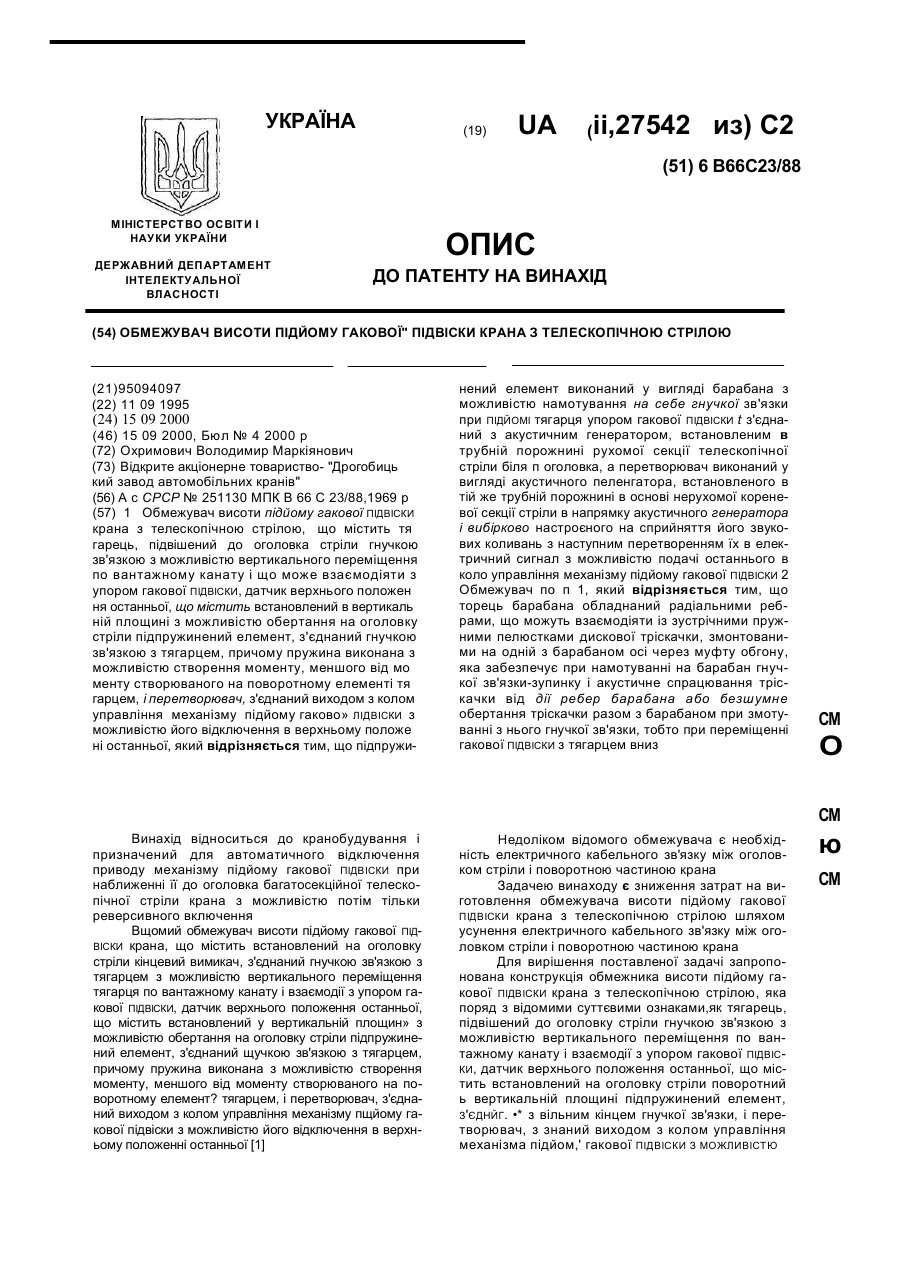
1 Біротативний електропривід механізмів підйому крюкового крана, який містить ТИХОХІДНІ вали редукторів, що з'єднані з валами барабанів механізмів головного та допоміжного ПІДЙОМІВ, а на швидкохідних валах цих редукторів встановлені гальма, який відрізняється тим, що для приводу головного та допоміжного механізмів підйому використовують двигун подвійного обертання (ДПО), швидкохідний вал редуктора, тихохідний вал якого з'єднаний з валом барабана допоміжного механізму підйому, приводять в обертання валом зовнішнього ротора, а швидкохідний вал редуктора, тихохідний вал якого з'єднаний з валом барабана механізму головного підйому, приводять в обертання валом внутрішнього ротора ДПО 2 Біротативний електропривід за п 1, який відрізняється тим, що для підйому вантажів Q E = Q|- + Qg , де Qr - вантажність механізму головного підйому, QB - вантажність механізму допо міжного підйому, необхідно виконання СПІВВІДНОQr Двіргіпг °-в ДГ'РВ'ПВ шення — - н В К І "' , де Дв і Дг - діаметри барабанів механізмів допоміжного та головного ПІДЙОМІВ, ірв, ірг - передаточні числа редукторів механізмів допоміжного та головного ПІДЙОМІВ, І|-|В . 'пг ' кратність поліспастів механізмів допоміжного та ГОЛОВНОГО ПІДЙОМІВ 3 Спосіб експлуатації біротативного електроприводу механізмів підйому крюкового крана, що включає переміщення вантажів допоміжним або головним механізмом підйому, який відрізняється тим, що після включення ДПО в мережу у потрібному напрямку розгальмовується допоміжний або головний механізм підйому 4 Спосіб експлуатації за п 3, який відрізняється тим, що при переміщенні вантажів Q E < Q|- + QB ПІСЛЯ включення ДПО в мережу одночасно розгальмовують вали як головного, так і допоміжного механізмів підйому CO ^и (О (О Ю Винахід застосовується на механізмах підйому вантажопідйомних кранів з головним та допоміжним підйомуми Відомий електропривід механізмів підйому крюкових вантажопідйомних кранів з двома механізмами підйому має два двигуни механізмів головного та допоміжного ПІДЙОМІВ, два редуктори, два барабана, два гальма та дві схеми керуванню механізмами головного та допоміжного ПІДЙОМІВ Спосіб експлуатації цих електроприводів такий, що при вмиканні електродвигуна механізма головного підйому в мережу у потрібному напрямку розгальмовується гальмо механізму головного підйому, а при включенні електродвигуна механізма допоміжного підйому в мережу у потрібному напрямку розгальмовується гальмо механізму допоміжного підйому [Справочник по кранам Том 2 Под ред ММ Гохберга М "Машиностроение" 1988 -559 с ил] Відомий електропривід має недоліки до яких належать два двигуна та дві схеми керування Окрім того, незважаючи на наявність двох механізмів підйому з загальною вантажопідйомністю Q^ = Qr + QB, де Qr - вантажопідйомність механізму головного підйому, QB - вантажопідйомність механізму допоміжного підйому, кран не забезпечує підйом вантажу, більшого ніж Qr Наявність двох двигунів збільшує практично у два рази встановлену масу та потужність двигунів У зв'язку з тим, що коли працює один з механізмів підйому, наприклад, головний, то двигун допоміжного механізму підйому не використовують, 56643 що знижує відносну довготривалість включення двигунів Технічна задача, на вирішення якої направлений винахід, є зменшення КІЛЬКОСТІ, установленої потужності, маси та схем керування двигунів, зростання часу використання двигуна подвійного обертання (ДПО), а також вантажопідйомності крана до значення s Qr + Технічний результат досягається тим, що, замість двох двигунів механізмів головного та допоміжного ПІДЙОМІВ та схем керування ними, застосований ДПО та схема керування ним Швидкохідний вал редуктора, тихохідний вал якого з'єднаний з валом барабана механізму допоміжного підйому приводиться в обертання валом зовнішнього ротора, а швидкохідний вал редуктора, тихохідний вал якого з'єднаний з валом барабана механізма головного підйому, приводиться в обертання валом внутрішнього ротора ДПО Забезпечення вантажопідйомності Q^ досягається тим, що при проектуванні та виготовленні механізмів підйому виконується співвідношення Qr . ДВ'РГІ В'РГ'ПГ ДГ'РВ' РВ'ПВ (1) де Дв, Дг - діаметри барабанів допоміжного та головного ПІДЙОМІВ, ІРВ, ірг - передаточні числа редукторів допоміжного та ГОЛОВНОГО ПІДЙОМІВ, іпв, іпг - кратність поліспастів допоміжного та ГОЛОВНОГО ПІДЙОМІВ Переміщення вантажів допоміжним або головним механізмами підйому забезпечується тим, що після включення ДПО в мережу у потрібному напрямку розгальмовуються гальма допоміжного або головного механізмів підйому Переміщення вантажів s Qr + ЗДІЙСНЮЄТЬСЯ включенням ДПО в мережу одночасним розгальмуванням валів як головного так і допоміжного механізмів підйому На приведених кресленнях зображені Фіг 1 електрокшематична схема електропривіда фіг 2 - переміщення Qr, фіг 3 - переміщення QB, фіг 4 - переміщення Q^ Електропривід має внутрішній 1, ЗОВНІШНІЙ 2 ротори ДПО, гальма 3 та 4, редуктори 5 та 6, барабани 7 та 8 головного та допоміжного ПІДЙОМІВ Поліспасти механізмів підйому не зображені Вал ротора 1 з'єднай з швидкохідним валом редуктора 5, тихохідний вал якого з'єднай з валом барабана 7 механізму головного підйому На валах 1 та 5 розташовано гальмо 3 механізму головного підйому Вал ротора 2 з'єднай з швидкохідним валом редуктора 6, тихохідний вал якого з'єднай з валом барабана 8 механізма допоміжного підйому На валах 2 та 6 розташовано гальмо 4 Електропривід працює так Після вибору праці механізму підйому та напрямку переміщення вантажу, наприклад, механізму головного підйому у напрямку підйому Qr ДПО включається у мережу з напрямком обертання поля ротора 2 на підйом Qr Гальмо 3 розгальмовується, а барабан 7 з допомогою редуктора 5 починає обертатися у напрямку проти годинникової стрілки, підіймаючи Qr Ротор 4 2 загальмован гальмом 4 Стала швидкість обертанню ротора 1 після виведення пускорегулювальних резисторів дорівнює номінальній швидкості обертання ДПО, тобто ші = шНОн Qo - швидкість обертання поля ДПО відносно ротора 2, SHOH - номінальне ковзання ДПО, а вантаж Qr переміщується зі швидкістю м/с 2 і р г - і|-|г Опускання Qr здійснюється зміною напрямка обертання поля відносно ротора 2 на спуск Qr Гальмо 3 розгальмовується, а барабан 7 через редуктор 5 починає обертатися у напрямку по годинниковій стрілці Стала швидкість спускання Qr дорівнює IV = Uro = м/с, 2І РГ -| пг де ш-іо = шо(1 + Sro) - швидкість обертання ротора при спусканні Qr, Sro - ковзання ДПО при спусканні Qr Праця механізму допоміжного підйому на підйом груза QB ЗДІЙСНЮЄТЬСЯ включенням ДПО в мережу з напрямком обертання поля ротора 2 на підйом QB Гальмо 4 розгальмовується, а барабан 8 з допомогою редуктора 6 обертається у напрямку годинникової стрілки, підіймаючи QB Стала швидкість обертання ротора 2 після виведення пускорегулювальних резисторів дорівнює номінальній швидкості обертання ДПО, тобто Ш2 = шНОн шо(1 - SHOH), а вантаж QB підіймається зі швидкістю uR = м/с 2 iРВ -і D D "'ПВ Опускання QB ЗДІЙСНЮЄТЬСЯ аналогічно з опусканням Qr Якщо рівність (1) виконується, то швидкості UB та Ur відносяться як При переміщенні вантажу Q^ механізми підйому головний та допоміжний працюють на один вантаж, як це зображено на фіг 4 Моменти на валах роторів 1 та 2 дорівнюють . • н .... ., _ ^ ' Р Г - ' П Г -Лг ., • н .... (2) ^'рв-'пв -Лв де г|г = Пв - к к д механізмів підйому Якщо рівність (1) виконується, то відношення по (2) (3) З рівняння (3) слідкує висновок, що при переміщенні вантажу моменти на валах роторів 1 та 2 рівні по величіні та протилежні по знаку у зв'язку з обертанням цих роторів у протилежних напрямках Частоти обертання роторів дорівнюють и югз = Дг и «вз з 2 і р г -'гіг рад/с, з 2 і р в • 'пв (4) рад/с, Дв де U 3 = и г з =U - швидкість переміщення 56643 включення ДПО в мережу з необхідним напрямком обертання поля розгальмовуються обидва ротори Швидкість переміщення вантажу 3^ дорівнює Застосування для привода механізмів підйому ,, _ ЗгДг» _ , м/с крокового крана ДПО дозволяє ВДВІЧІ зменшити КІЛЬКІСТЬ, масу та встановлену потужність двигунів, тобто менше, ніж при переміщенні вантажу Q схем керування та ВДВІЧІ збільшити час викорисабо Q B у відношенні тання двигуна Таке застосування ДПО дозволяє збільшити -иг = = Qr + Qz Qz вантажопідйомність крана до маси Праця головного або допоміжного ПІДЙОМІВ заЗ застосуванням ДПО вибір праці одного мебезпечується розгальмуванням необхідного вала ханізму підйому здійснюється тим, що після вклюпісля вмикання ДПО у мережу чення ДПО у мережу з необхідним напрямком Праця крана з вантажопідйомністю Q^ забезобертання поля відносно зовнішнього ротора, розпечується одночасним розгальмуванням обох вагальмовуються потрібні гальма лів ДПО При необхідності підйому вантажу Q^ після м/с Q z 2 І Р Г • ' п г Q z 2 І Р В | п в Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюBi-rotary electric drive of hook crane mechanisms for lifting and method for its operation
Назва патенту російськоюБиротационный электропривод механизмов подъема крюкового крана и способ его эксплуатации
МПК / Мітки
МПК: B66C 13/22
Мітки: біротативний, крюкового, підйому, спосіб, електропривід, крана, експлуатації, механізмів
Код посилання
<a href="https://ua.patents.su/3-56643-birotativnijj-elektroprivid-mekhanizmiv-pidjjomu-kryukovogo-krana-ta-sposib-jjogo-ekspluataci.html" target="_blank" rel="follow" title="База патентів України">Біротативний електропривід механізмів підйому крюкового крана та спосіб його експлуатації</a>
Біротативний електропривід ескалаторів
Номер патенту: 50076
Опубліковано: 15.10.2002
Автори: Бродський Веніамін Лейбович, Симоненко Олексій Сергійович
МПК: B66B 23/00
Мітки: електропривід, ескалаторів, біротативний
Формула / Реферат:
1. Біротативний електропривід ескалаторів, що містить "n" стрічок переміщення пасажирів, де "n" - парне число стрічок, вали ведучих зірочок яких з’єднані з ведучими валами редукторів, який відрізняється тим, що ведені вали цих редукторів приводяться в обертання валами роторів електродвигуна подвійного обертання, крім того редуктори мають рівні по величині та по знаку передаточні числа, електропривід містить додаткові...
Обмежувач висоти підйому гакової підвіски крана з телескопічною стрілою
Номер патенту: 27542
Опубліковано: 15.09.2000
Автор: Охримович Володимир Маркіянович
МПК: B66C 23/88
Мітки: висоті, стрілою, обмежувач, підйому, крана, телескопічною, гакової, підвіски
Текст:
...поворотному елементі тягарцем містить нові, ВІДМІННІ від прототипу суттєві ознаки, а саме пщпружинений елемент виконаний у ВИГЛЯДІ барабану з можливістю намотування на себе гнучкої зв'язки при ПІДЙОМІ тягарця упором гакової ПІДВІСКИ І з'єднаний з акустичним генератором, встановленим в трубній порожнині рухомої секції телескопічної стріли біля її оголовку, а перетворювач виконаний у вигляді акустичного пеленгатора, встановленого в тій же...
Спосіб контролю зносу робочого органа машин або механізмів та інформаційний пристрій для його здійснення
Номер патенту: 55210
Опубліковано: 17.03.2003
Автори: Бондаренко Микола Олександрович, Дніпровський Олексій Іванович, Кулаківський Володимир Миколайович
МПК: G01N 3/56
Мітки: здійснення, зносу, спосіб, інформаційний, машин, робочого, органа, пристрій, контролю, механізмів
Формула / Реферат:
1. Спосіб контролю зносу робочого органа машин або механізмів, який передбачає вимірювання чистого робочого часу та інших додаткових параметрів роботи робочого органа і наступне визначення зносу робочого органа з урахуванням умов роботи і виду робочого органа, який відрізняється тим, що попередньо задають значення коефіцієнта, який враховує вартість робочого органа та вартість одиниці часу роботи на даній машині або механізмі, як додаткові...
Спосіб підйому затонулого корабля і пристрій для його реалізації
Номер патенту: 39055
Опубліковано: 15.05.2001
Автори: Тимофеев Микола Іванович, Лівінський Олександр Михайлович, Бондаренко Євген Валентинович
МПК: B63C 7/00, G01M 19/00
Мітки: затонулого, підйому, спосіб, реалізації, корабля, пристрій
Формула / Реферат:
1. Спосіб підйому затонулого корабля, що включає, кріплення зв'язків, захоплювачів, трубопроводів, резервуарів, заповнення їх газом, з використанням виштовхуючої сили, який відрізняється тим, що спочатку заповнену водою систему резервуарів опускають і закріпляють до правого кінця з подальшою відкачкою води і заповненням газом, а потім заповнену водою систему опускають і закріпляють до лівого кінця, з подальшою відкачкою води і заповненням...
Спосіб керування асинхронним двигуном та електропривід, що його реалізує
Номер патенту: 31656
Опубліковано: 15.12.2000
Автор: Михайлюта Сергій Леонтійович
МПК: H02P 27/04, H02P 7/00
Мітки: електропривід, асинхронним, реалізує, двигуном, керування, спосіб
Текст:
...для забезпечення мінімального стру , статора, реактивна складова струну статора нае підтримуватись пропорційн активній складовій. На фіг Л зображена крива зміни моменту асинхронного двигуна 4A100L4 одержана в результаті моделювання, при зміні співвідношення складових стрn чиї запропонований спосіб керування асинхронним двнгуном дозволяє забезпечнт високі динамічні властивості електроприводу та мінімальне споживання струм від...
Попередній патент: Викопувально-очисний пристрій коренеплодів
Наступний патент: Спосіб виробництва жовтого вина “янтар таїровський”
Випадковий патент: Гідроциліндр