Біцентровий спосіб розпізнавання групових точкових об’єктів
Формула / Реферат
Біцентровий спосіб розпізнавання групових точкових об'єктів (ГТО), який характеризується тим, що базується на визначенні додаткового центру тяжіння ГТО, координати якого обчислюються за формулами  та
та  , де
, де ![]() ,
, ![]() - координати центру тяжіння елементів ГТО, які беруть участь в обчисленні додаткового центру тяжіння; r - кількість елементів, що бере участь в обчисленні додаткового центру тяжіння, та радіус-векторів від центру тяжіння елементів ГТО до центру тяжіння кожного з цих елементів, значення яких обчислюється за формулою
- координати центру тяжіння елементів ГТО, які беруть участь в обчисленні додаткового центру тяжіння; r - кількість елементів, що бере участь в обчисленні додаткового центру тяжіння, та радіус-векторів від центру тяжіння елементів ГТО до центру тяжіння кожного з цих елементів, значення яких обчислюється за формулою ![]() , де
, де ![]() ,
, ![]() - координати центру тяжіння ГТО,
- координати центру тяжіння ГТО, ![]() ,
, ![]() - координати центру тяжіння кожного елемента ГТО, що дозволяє враховувати довільну форму групового точкового об'єкта та його складні довільні спотворення завдяки врахуванню кута між нульовим вектором та радіус-векторами при визначенні їх напрямків за формулою:
- координати центру тяжіння кожного елемента ГТО, що дозволяє враховувати довільну форму групового точкового об'єкта та його складні довільні спотворення завдяки врахуванню кута між нульовим вектором та радіус-векторами при визначенні їх напрямків за формулою:
та нормалізації й ранжуванні ознак ГТО.
Текст
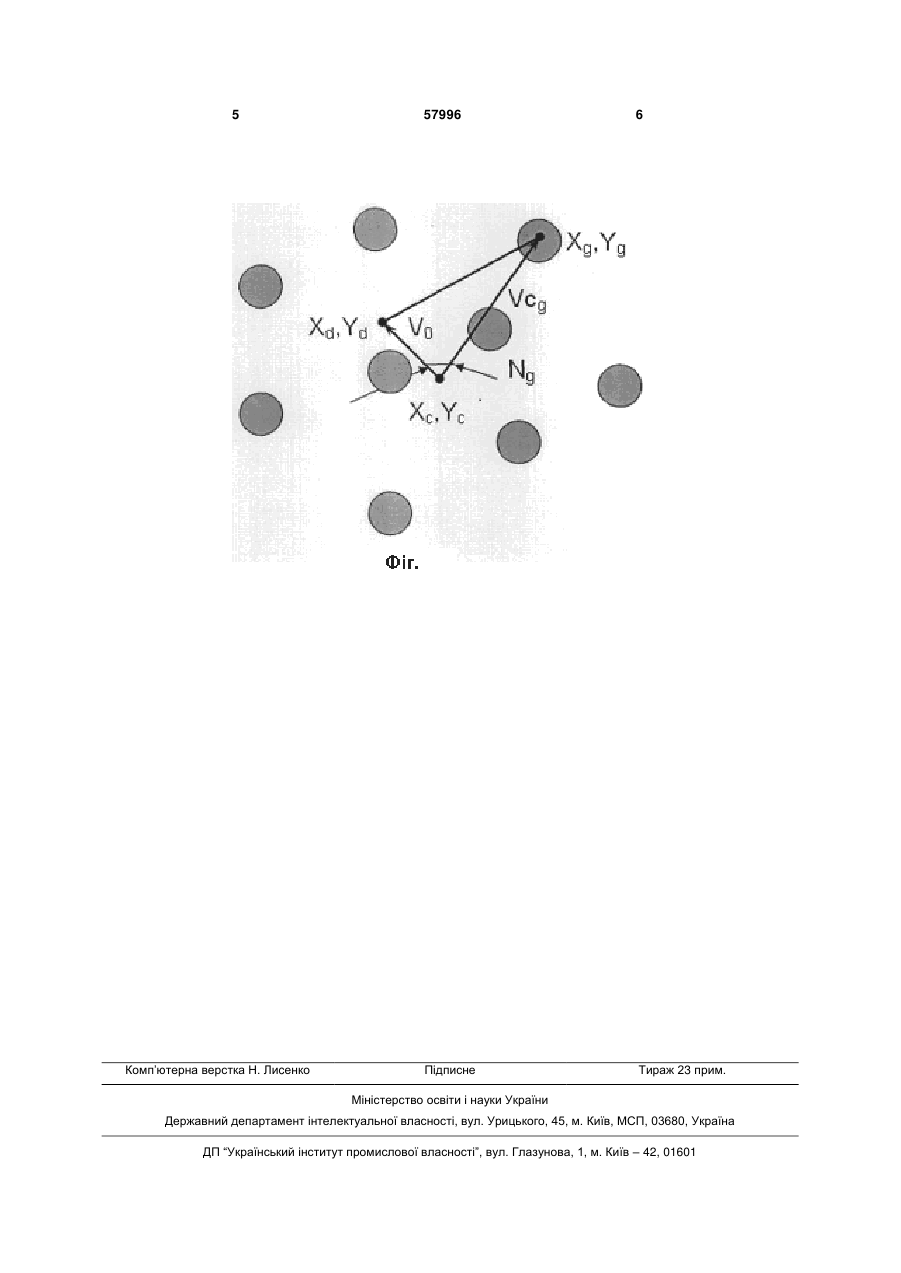
Біцентровий спосіб розпізнавання групових точкових об'єктів (ГТО), який характеризується тим, що базується на визначенні додаткового центру тяжіння ГТО, координати якого обчислю 3 57996 Радіус вектори від основного центру тяжіння елементів ГТО до центру тяжіння кожного з цих елементу характеризується значенням Vc і напрямком N: Vc1 N1 Vc 2 N Vc Vc g та N Ng 2 , Vcn Nn де, g 1 2,..., n (де n - кількість елементів , ГТО). Значення радіус-векторів обчислюється за формулою ~ Vcg ( Xc Og )2 ( Yc Yg )2 де Xc , Yc - координати центру тяжіння ГТО; Xg , Yg - координати центру тяжіння кожного елементу ГТО. Це дозволяє враховувати довільну форму ГТО. Визначення додаткового центру виконують на основі значень координат ] центрів елементів ГТО, для яких відстань від центру тяжіння ГТО до центру тяжіння кожного елементу потрапляє до г обраних радіус-векторів (число г з одного боку обмежено виключенням визначення координат додаткового центру за помилковими елементами та достатністю векторів для опису форми ГТО, а з іншого боку складністю обчислень і мінімальною пороговою відстанню між основним і додатковим центрами тяжіння). Координаті [додаткового центру обчислюються за формулою: r Xcg Xd g1 r Yc g g1 та Yd , r r де Xcg , Yc g - координати центру тяжіння елементів ГТО, які беруть участь в обчисленні додаткового центру тяжіння; r - кількість елементів, що бере участь в обчисленні додаткового центру тяжіння (1 r n) . Це також забезпечує інваріантність способу розпізнавання до дзеркально х) відбиття і зсуву ГТО. Як нульовий вектор Vo при знаходженні напрямків радіус-векторів N використовується вектор між основним, та додатковим центрами тяжіння ГТО. Для забезпечення інваріантності способу розпізнавання до повороту вхідного зображення ГТО враховується кут між нульовим вектором і радіусвекторами від центру тяжіння ГТО до центру тяжіння кожного елементу (фіг.), який обчислюється за формулою: ~ ~ ( Xc Og )2 ( Yc Yg )2 ( Xc Od)2 ( Yc Yd )2 ~ 2 ~ 2 2 ( Xc Og ) ( Yc Yg ) ( Xc Od)2 ( Yc Yd )2 ~ ( Xc Od)2 ( Yc Yd )2 ~ 2 ~ 2 ( Xc Og ) ( Yc Yg )2 ( Xc Od)2 ( Yc Yd )2 Ng arccos( 4 де X g , Yg – координати центру тяжіння кожного елементу ГТО; X c , Yc - координати центру тяжіння ГТО; Xd , Yd - координати додаткового центру тяжіння ГТО. Далі виконують ранжирування значень і напрямків радіус-векторів. Це забезпечує інваріантність методу до лінійних перетворень ГТО. Для забезпечення інваріантності методу до масштабування і нелінійних спотворень виконано нормалізацію значень радіус-векторів ГТО. Оскільки кількість елементів ГТО не фіксована, і тому може бути не однакова для різних об'єктів, то при порівнянні з еталоном спочатку вибирають ті еталони, в яких кількість елементів в матриці значень (і, відповідно, напрямків) радіус-векторів дорівнює кількості елементів в розпізнаваному ГТО. Далі для порівняння з еталоном обчислюють коефіцієнт кореляції K( Vc nor , V etal) n n n g 1 n Vc norg Vetal Vc norg Vetal g 1 g 1 n n n g 1 (n n g 1 g 1 g 1 2 Vc norg ( Vc norg )2 ) (n etal2 ( V etal g )2 ) g де Vc norg - матриця значень радіус-векторів від центру тяжіння ГТО до центру тяжіння кожного елементу ГТО в зображеннях зчитаних ГТО; V etal - матриця значень радіус-векторів від центру тяжіння ГТО до центру тяжіння кожного елементу ГТО в зображеннях еталонів. Запропонований спосіб розпізнавання групових точкових об'єктів базується на визначенні додаткового центру тяжіння ГТО та радіус-векторів від центру тяжіння елементів ГТО до центру тяжіння кожного з цих елементів, дозволяє враховувати довільну форму групового точкового об'єкту та його складні довільні спотворення завдяки врахуванню кута між нульовим вектором та радіусвекторами при визначенні їх напрямків, та нормалізації й ранжуванні ознак ГТО. Джерела інформації: 1. Лабораторный стенд для отработки алгоритмов движения микроспутника по снимкам звездного неба (Laboratory Facility for Verification Attitude Determination Algorithms Using Starry Sky Pictures Preprint, Inst. Appl. Marh., the Russian Academy of Science) [Электронный ресурс] / Овчинников М.Ю., Середницкий А.С., Овчинников A.M. / ИПМ им. М.В.Келдыша РАН. - Режим доступа: http://www. keldysh.ru/papers/2006/prep43/prep2006 43.html. 2. Пат.46476 Україна, G06K9/00. Спосіб розпізнавання групових точкових об'єктів / Дубровкина М.В., заявник та власник НДПКІ "Іскра". №u200906503; заявл. 22.06.2009; опубл.25.12.09, Бюл. №24. 5 Комп’ютерна верстка Н. Лиcенко 57996 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBicenter recognition method of group poit objects
Автори англійськоюDubrovkina Marharyta Vasylivna
Назва патенту російськоюБицентровый способ распознавания групповых точечных объектов
Автори російськоюДубровкина Маргарита Васильевна
МПК / Мітки
Мітки: точкових, розпізнавання, групових, об'єктів, спосіб, біцентровий
Код посилання
<a href="https://ua.patents.su/3-57996-bicentrovijj-sposib-rozpiznavannya-grupovikh-tochkovikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Біцентровий спосіб розпізнавання групових точкових об’єктів</a>
Спосіб розпізнавання групових точкових об`єктів
Номер патенту: 46476
Опубліковано: 25.12.2009
Автор: Дубровкіна Маргарита Василівна
МПК: G06K 9/00
Мітки: об'єктів, розпізнавання, точкових, спосіб, групових
Формула / Реферат:
Спосіб розпізнавання групових точкових об'єктів (ГТО), який відрізняється тим, що базується на визначенні значень та напрямків радіус-векторів від центру ваги групи інформаційних елементів ГТО до центру ваги кожного з цих елементів, які обчислюються за формулами , де ,
Система розпізнавання групових точкових об’єктів
Номер патенту: 46187
Опубліковано: 10.12.2009
Автор: Дубровкіна Маргарита Василівна
МПК: G06K 9/00
Мітки: об'єктів, точкових, групових, розпізнавання, система
Формула / Реферат:
Система розпізнавання групових точкових об'єктів (ГТО), яка забезпечує достовірність розпізнавання ГТО з урахуванням не тільки світлотехнічних та геометричних характеристик елементів ГТО та сторонніх об'єктів, але і складних афінних перетворень та нелінійних перекручень ГТО, яка відрізняється тим, що система розпізнавання групових точкових об'єктів має в своєму складі пристрій отримання зображення ГТО, блок обробки та блок живлення, також...
Головний лінійний пристрій, пристрій обслуговування групових ліній і спосіб керування пристроєм обслуговування групових ліній
Номер патенту: 32540
Опубліковано: 15.02.2001
Автори: Хааг Кенет Вільсон, Лью Шен-Чанг, Петерс Джім Дюард
МПК: H04L 12/66, H04Q 11/04, H04M 13/00
Мітки: пристрій, головний, обслуговування, керування, групових, ліній, пристроєм, спосіб, лінійний
Текст:
...присвоенный номер для управляющих ячеек типа данных используется для обеспечения, что сообщения прибывают в правильной последовательности, и что сообщения не потеряны при передаче Адрес устройства, используемый в заголовке, идентифицирует периферийное устройство в дистанционной линейной группе, которой соответствующее сообщение данных должно быть послано 32540 Например, адрес может указывать HLSC 130-А один из линейных блоков или модуль...
Спосіб радіолокаційного розпізнавання об’єктів
Номер патенту: 17731
Опубліковано: 16.10.2006
Автори: Булай Андрій Миколайович, Овсянніков Петро Васильович, Обод Іван Іванович
МПК: G01S 13/00
Мітки: спосіб, розпізнавання, об'єктів, радіолокаційного
Формула / Реферат:
Радіолокаційний спосіб розпізнавання об’єктів, який полягає в тому, що запитником випромінюють кодовий сигнал запиту, код якого визначають за кодом шкали часу системи розпізнавання, який приймають відповідачем, порівнюють його з діючим кодовим сигналом запиту у даний момент часу, код сигналу відповіді визначають за кодом шкали часу системи розпізнавання, який приймають запитником і порівнюють його з діючим кодовим сигналом відповіді у даний...
Спосіб логічного розпізнавання об’єктів
Номер патенту: 82212
Опубліковано: 25.03.2008
Автор: Білозерський Леонід Анатолійович
МПК: G06K 9/68
Мітки: розпізнавання, логічного, спосіб, об'єктів
Формула / Реферат:
Спосіб логічного розпізнавання об'єктів, що полягає у виборі логічних ознак для заданого складу класів об'єктів, у визначенні логічних ознак невідомого розпізнаваного об'єкта, генерації логічних описів класів, виконанні розпізнавання невідомого об'єкта, який відрізняється тим, що для визначення логічних ознак використовують інформацію фізичних вимірників і їхніх комбінацій, виділяють ni специфічних логічних ознак, властивих кожному і-му...
Попередній патент: Спосіб радіохемотерапії недрібноклітинного раку легені
Наступний патент: Піковий детектор
Випадковий патент: Прямотечійний водовипуск