Пристрій для орієнтації деталей
Номер патенту: 60896
Опубліковано: 15.10.2003
Автори: Коваль Аркадій Миколайович, Кирилович Валерій Анатолійович, Черепанська Ірина Юріївна
Формула / Реферат
Пристрій для орієнтації деталей, що містить корпус (1), підпружинений повзун (2) з ведучим роликом (4), зв'язаним через муфту (13) з приводом (12) повороту ведучого ролика, каретку (5), що кінематично зв'язана з підпружиненим повзуном (2) і встановлена з можливістю зустрічного з ним поступального руху, коромисло (8), що встановлене на каретці (5), опорні ролики (3), один з яких встановлений на підпружиненому повзуні (2), а інші - на коромислі (8), який відрізняється тим, що введені безконтактний датчик (9) контролю наявності деталі, встановлений на каретці (5), пружина (6), що прикріплена одним кінцем до каретки (5), а другим - до датчика (7) контролю величини зусилля притиску деталі, що встановлений на каретці (5), датчик (14) кінцевого положення каретки, встановлений на корпусі (1) за кареткою (5), привід (10) переміщення підпружиненого повзуна і каретки, кінематично зв'язаний з підпружиненим повзуном (2) і кареткою (5), безконтактний датчик (11) контролю поверхні деталі, встановлений на підпружиненому повзуні (2).
Текст
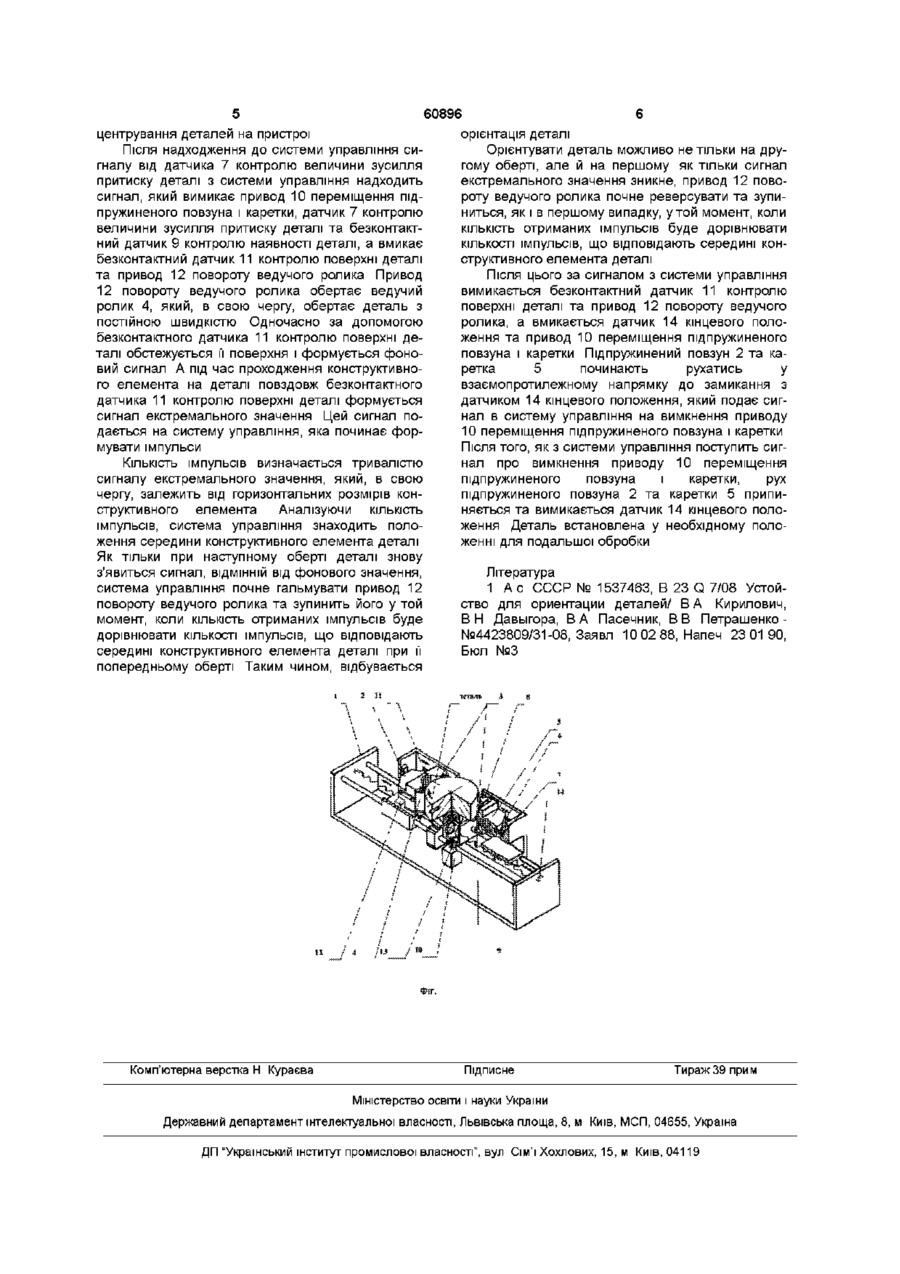
Пристрій для орієнтації деталей, що містить корпус (1), підпружинений повзун (2) з ведучим роликом (4), зв'язаним через муфту (13) з приводом (12) повороту ведучого ролика, каретку (5), що кінематично зв'язана з підпружиненим повзуном (2) і встановлена з можливістю зустрічного з ним поступального руху, коромисло (8), що встановлене на каретці (5), опорні ролики (3), один з яких встановлений на підпружиненому повзуні (2), а ІНШІ - на коромислі (8), який відрізняється тим, що введені безконтактний датчик (9) контролю наявності деталі, встановлений на каретці (5), пружина (6), що прикріплена одним кінцем до каретки (5), а другим - до датчика (7) контролю величини зусилля притиску деталі, що встановлений на каретці (5), датчик (14) кінцевого положення каретки, встановлений на корпусі (1) за кареткою (5), привід (10) переміщення підпружиненого повзуна і каретки, кінематично зв'язаний з підпружиненим повзуном (2) і кареткою (5), безконтактний датчик (11) контролю поверхні деталі, встановлений на підпружиненому повзуні (2) Винахід належить до галузі машинобудування і може бути використаний в роботизованих технологічних комплексах механообробки та складання для орієнтації циліндричних деталей Відомий пристрій для орієнтації деталей [І], що обраний як прототип винаходу Прототип, як і пристрій, що пропонується, містить корпус, підпружинений повзун з ведучим роликом, зв'язаним через муфту з приводом повороту ведучого ролика, каретку, що кінематичне зв'язана з підпружиненим повзуном і встановлена з можливістю зустрічного з ним поступального руху, коромисло, що встановлене на каретці, та опорні ролики, один з яких встановлений на підпружиненому повзуні, а ІНШІ - на коромислі Але на відміну від пристрою, що пропонується, до складу прототипу входить уловлювач, який сканує поверхню деталі контактним способом Це зумовлює неможливість орієнтувати деталі з різними висотами розташування осей радіальних отворів, що залежать від габаритних розмірів уловлювача, без додаткового переналагодження Наприклад, неможливо орієнтувати деталі з пазами на твірній, розмір яких значно перевищує габаритні розміри уловлювача Наявність уловлювача в прототипі потребує і складного переналагодження на орієнтацію деталей з іншими видами конструктивних елементів, ВІДМІННИМИ від отвору (наприклад, пази під сегме нтні та призматичні шпонки, криволінійні пази на твірній тощо), при ЗМІНІ діаметру та форми радіального отвору, а також при ЗМІНІ ВИСОТИ розташування осі отвору Таким чином, наявність уловлювача в пристроі-прототипі призводить до обмеження його технологічних можливостей А наявність в прототипі спільного приводу для механізму переміщення підпружиненого повзуна і каретки та механізму повороту ведучого ролика унеможливлює регулювання зусилля притиску деталі опорними роликами при и центруванні Це призводить до деформації деталей виготовлених з м'яких або крихких матеріалів, що також звужує технологічні можливості пристрою-прототипу Крім того, точність орієнтації деталей пристроєм-прототипом залежить від габаритних розмірів уловлювачів Якщо діаметр радіального отвору деталі менший за діаметр кінця уловлювача, уловлювач не потрапить в отвір, а при діаметрі радіального отвору більшому за діаметр кінця уловлювача буде велика похибка орієнтації Знижує точність орієнтації деталей і зношування уловлювача внаслідок контактного сканування деталі, і можливе неспівпадання осі уловлювача з радіальним отвором на деталі, і зміщення легких деталей при реверсі підпружиненого повзуна після закінчення їх орієнтації, зумовлене дією на деталь уловлювача, який виконано підпружиненим (О о> 00 о (О 60896 деталей складається з корпусу 1, підпружиненого повзуна 2, опорних роликів 3, ведучого ролика 4, каретки 5, пружини 6, датчика 7 контролю величини зусилля притиску деталі, коромисла 8, безконтактного датчика 9 контролю наявності деталі, приводу 10 переміщення підпружиненого повзуна і каретки, безконтактного датчика 11 контролю поверхні деталі, приводу 12 повороту ведучого ролика, муфти 13 та датчика 14 кінцевого положення каретки Пристрій для орієнтації деталей містить корпус 1, на якому встановлені всі конструктивні елементи пристрою Підпружинений повзун 2 має ведучий ролик 4, що зв'язаний через муфту 13 з приводом 12 повороту ведучого ролика Каретка 5 кінематичне зв'язана з підпружиненим повзуном 2 і встановлена з можливістю зустрічного з ним поступального руху Коромисло 8 встановлене на каретці 5 Один з опорних роликів 3 встановлений на підпружиненому повзуні 2, а ІНШІ (пара) - на коромислі 8 симетрично відносно осі переміщення каретки 5 та підпружиненого повзуна 2 БезконВведення датчика контролю величини зусилля тактний датчик 9 контролю наявності деталі встапритиску деталі, який працює за посередництвом новлений на каретці 5 Пружина 6 прикріплена додатково введеної пружини, та введення приводу одним кінцем до каретки 5, а другим - до датчика 7 переміщення підпружиненого повзуна і каретки контролю величини зусилля притиску деталі, що дає можливість регулювати зусилля притиску девстановлений на каретці 5 Датчик 14 кінцевого талі опорними роликами при її центруванні, що положення встановлений на корпусі 1 за кареткою запобігає деформації деталі опорними роликами 5 Привод 10 переміщення підпружиненого повзуДодатково введена пружина одним кінцем на і каретки кінематичне зв'язаний з кріпиться до каретки, а другим - до датчика конпідпружиненим повзуном 2 та кареткою 5 Безконтролю величини зусилля притиску деталі Датчик тактний датчик 11 контролю поверхні деталі встаконтролю величини зусилля притиску деталі налановлений на підпружиненому повзуні 2 Пристрій годжується на визначений типорозмір деталі і реадля орієнтації деталей працює таким чином Пегує на величину стискання пружини Величина ред початком роботи налагоджують датчик 7 констискання пружини пропорційна діаметральним тролю величини зусилля притиску деталі на вирозмірам деталі і змінюється при русі каретки до значений типорозмір деталі таким чином, щоб деталі При досягненні заданої величини стисканвеличина зусилля стискання пружини 6 була проня пружини привод переміщення підпружиненого порційна діаметральному розміру деталі повзуна і каретки гальмується і припиняє переміщення каретки та підпружиненого повзуна Це В вихідному стані підпружинений повзун 2 та попереджає деформацію деталі опорними роликаретка 5 максимально віддалені один від одного ками, які встановлені на каретці і підпружиненому Деталь, яку потрібно орієнтувати, за допомогою повзуні Таким чином, уникається деформація деманіпулятора промислового робота (на кресленні талі опорними роликами при її орієнтації і значно не показаний) встановлюють в зону між розширюється діапазон орієнтування деталей з підпружиненим повзуном 2 та кареткою 5 Нам'яких та крихких конструктивних матеріалів явність деталі в зоні контролюється безконтактним датчиком 9 контролю наявності деталі, наприклад, А введення безконтактного датчика контролю інфрачервоного діапазону Як тільки від безконнаявності деталі та безконтактного датчика конттактного датчика 9 контролю наявності деталі на ролю поверхні деталі виключає вплив на точність систему управління надходить сигнал про наорієнтації деталей зношування уловлювача, зміявність деталі в зоні між підпружиненим повзуном щення легких деталей при реверсі повзуна, зумо2 та кареткою 5, вмикається привод 10 певлене дією на деталь підпружиненого уловлювача, реміщення підпружиненого повзуна і каретки та неспівпадання осі уловлювача і радіального отводатчик 7 контролю величини зусилля притиску ру на деталі Таким чином, точність орієнтації дедеталі, що контролює зусилля притиску деталі талей запропонованим пристроєм не знижується в опорними роликами 3 За допомогою приводу 10 процесі експлуатації пристрою переміщення підпружиненого повзуна і каретки Крім того, введення безконтактного датчика підпружинений повзун 2 та каретка 5 починають контролю наявності деталі та безконтактного датпоступово переміщуватися по напрямних у чика контролю поверхні деталі, які забезпечують взаємозустрічному напрямку Датчик 7 контролю безконтактне сканування поверхні деталі, дозвовеличини зусилля притиску деталі реагує на делить обертати деталь з більш високими швидкоформування пружини 6 під час руху каретки 5 При стями, що прискорить процес орієнтації і тому підпритисканні опорних роликів 3 до деталі величина вищить продуктивність процесу зусилля притиску деталі досягає заданого значенСуть винаходу пояснюється кресленням Пеня і спрацьовує датчик 7 контролю величини зурелік креслень фіг 1 - загальний вигляд пристрою силля притиску деталі Таким чином, відбувається для орієнтації деталей Пристрій для орієнтації В основу винаходу поставлено задачу вдосконалення пристрою для орієнтації деталей, щоб забезпечити розширення технологічних можливостей пристрою при заданій точності орієнтації деталей Поставлена задача розширення технологічних можливостей пристрою вирішується шляхом введення безконтактних датчиків, а саме - датчика контролю наявності деталі та датчика контролю поверхні деталі Завдяки цьому контактний спосіб сканування поверхні деталі замінюється на безконтактний Це дає можливість уникнути пропорційної залежності розміру, виду і місця розміщення технологічного елемента на деталі, що орієнтується, від габаритного розміру уловлювача, а також уникнути необхідності переналагодження пристрою на орієнтацію деталей з іншими видами конструктивних елементів, ВІДМІННИХ від отвору Це дозволяє орієнтувати деталі з різними видами конструктивних елементів і різноманітних типорозмірів 60896 центрування деталей на пристрої орієнтація деталі Після надходження до системи управління сиОрієнтувати деталь можливо не тільки на другналу від датчика 7 контролю величини зусилля гому оберті, але й на першому як тільки сигнал притиску деталі з системи управління надходить екстремального значення зникне, привод 12 повосигнал, який вимикає привод 10 переміщення підроту ведучого ролика почне реверсувати та зупипружиненого повзуна і каретки, датчик 7 контролю ниться, як і в першому випадку, у той момент, коли величини зусилля притиску деталі та безконтактКІЛЬКІСТЬ отриманих імпульсів буде дорівнювати ний датчик 9 контролю наявності деталі, а вмикає КІЛЬКОСТІ імпульсів, що відповідають середині конбезконтактний датчик 11 контролю поверхні деталі структивного елемента деталі та привод 12 повороту ведучого ролика Привод Після ЦЬОГО за сигналом з системи управління 12 повороту ведучого ролика обертає ведучий вимикається безконтактний датчик 11 контролю ролик 4, який, в свою чергу, обертає деталь з поверхні деталі та привод 12 повороту ведучого постійною швидкістю Одночасно за допомогою ролика, а вмикається датчик 14 кінцевого полобезконтактного датчика 11 контролю поверхні деження та привод 10 переміщення підпружиненого талі обстежується її поверхня і формується фоноповзуна і каретки Підпружинений повзун 2 та кавий сигнал А під час проходження конструктивноретка 5 починають рухатись у го елемента на деталі повздовж безконтактного взаємопротилежному напрямку до замикання з датчика 11 контролю поверхні деталі формується датчиком 14 кінцевого положення, який подає сигсигнал екстремального значення Цей сигнал понал в систему управління на вимкнення приводу дається на систему управління, яка починає фор10 переміщення підпружиненого повзуна і каретки мувати імпульси Після ТОГО, ЯК З системи управління поступить сигнал про вимкнення приводу 10 переміщення КІЛЬКІСТЬ імпульсів визначається тривалістю підпружиненого повзуна і каретки, рух сигналу екстремального значення, який, в свою підпружиненого повзуна 2 та каретки 5 припичергу, залежить від горизонтальних розмірів конняється та вимикається датчик 14 кінцевого полоструктивного елемента Аналізуючи КІЛЬКІСТЬ ження Деталь встановлена у необхідному полоімпульсів, система управління знаходить положенні для подальшої обробки ження середини конструктивного елемента деталі Як тільки при наступному оберті деталі знову з'явиться сигнал, ВІДМІННІЙ ВІД фонового значення, Література система управління почне гальмувати привод 12 1 А с СССР № 1537463, В 23 Q 7/08 Устойповороту ведучого ролика та зупинить його у той ство для ориентации деталей/ В А Кирилович, момент, коли КІЛЬКІСТЬ отриманих імпульсів буде В Н Давыгора, В А Пасечник, В В Петрашенко дорівнювати КІЛЬКОСТІ імпульсів, що відповідають №4423809/31-08, Заявл 10 02 88, Напеч 23 0190, середині конструктивного елемента деталі при її Бюл №3 попередньому оберті Таким чином, відбувається Комп'ютерна верстка Н Кураєва Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for orientation of parts
Автори англійськоюKyrylovych Valerii Anatoliiovych
Назва патенту російськоюУстройство для ориентации деталей
Автори російськоюКирилович Валерий Анатольевич
МПК / Мітки
МПК: B23Q 7/08
Мітки: деталей, орієнтації, пристрій
Код посилання
<a href="https://ua.patents.su/3-60896-pristrijj-dlya-oriehntaci-detalejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій для орієнтації деталей</a>
Пристрій для орієнтації деталей
Номер патенту: 13536
Опубліковано: 25.04.1997
Автори: Білозеров Василь Олександрович, Бариленко Володимир Никанорович, Шишов Валерій Володимирович, Комаров Ігор Миколайович
МПК: B23Q 7/06
Мітки: пристрій, деталей, орієнтації
Формула / Реферат:
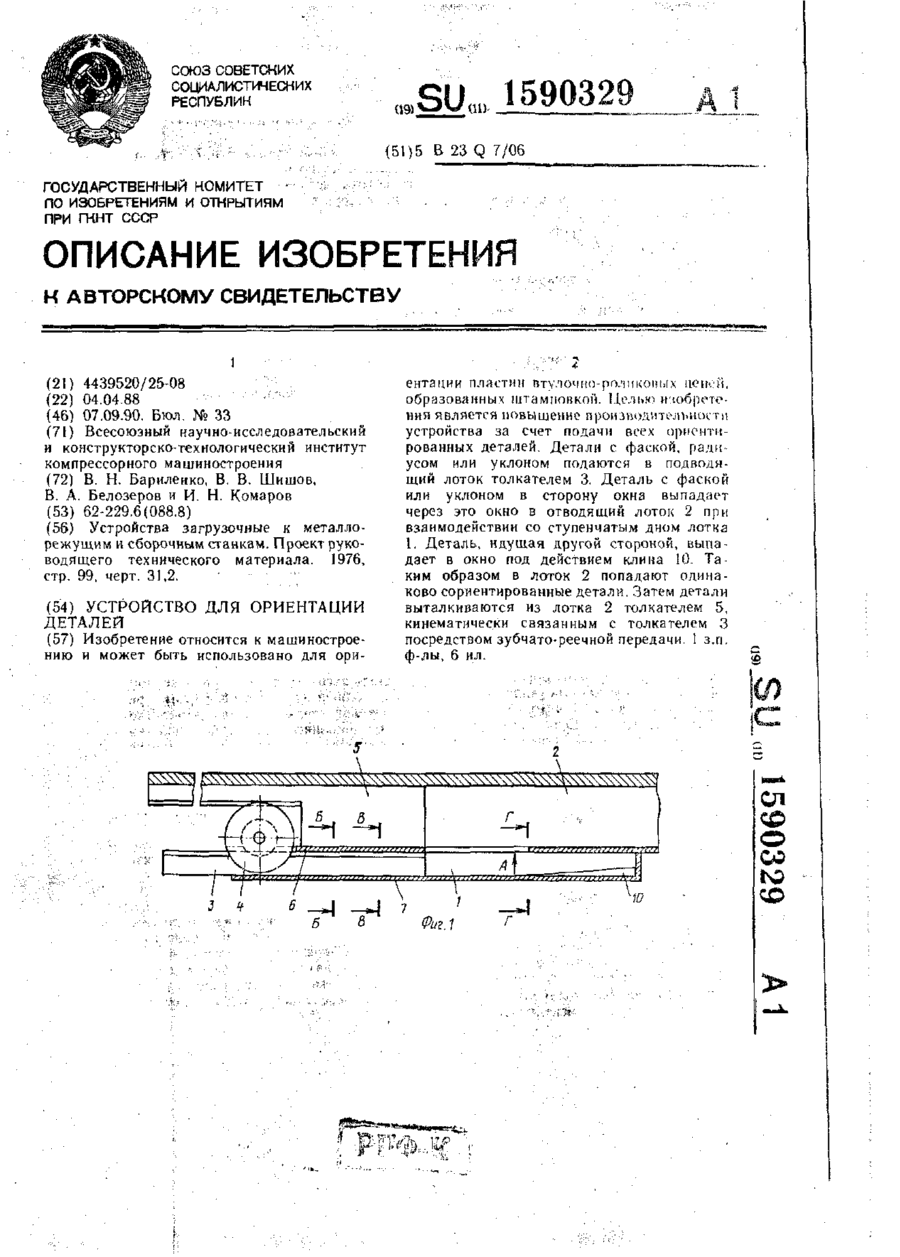
1. Устройство для ориентации деталей, содержащее подводящий лоток с окном в боковой стенке, нижняя кромка которого выполнена выше дна подводящего лотка, отводящий лоток, установленный параллельно подводящему лотку и имеющий общую боковую стенку с подводящим лотком, и подающий механизм, отличающееся тем, что, с целью повышения производительности, дно подводящего лотка в поперечном сечении выполнено ступенчатой формы, при этом в боковой...
Пристрій завантаження, орієнтації та затискання колоди
Номер патенту: 57990
Опубліковано: 15.07.2003
Автори: Пуш Осип Матвійович, Григор'єв Анатолій Сергійович, Наконечний Іван Петрович
МПК: B27B 13/00
Мітки: колоди, завантаження, затискання, орієнтації, пристрій
Формула / Реферат:
Пристрій завантаження, орієнтації та затискання колоди, який включає гідравлічний вилковий механізм завантаження, гідравлічний механізм вертикального переміщення і кантування колоди, упори та гідравлічні затискні пристрої, який відрізняється тим, що затискні пристрої мають коливний опорний корпус, на якому розміщені два повзуни з висувними затискними упорами, один із повзунів з'єднаний з штоком гідроциліндра, а другий - з його корпусом, а...
Пристрій для контролю радіального биття в призмах
Номер патенту: 1936
Опубліковано: 15.08.2003
Автори: Кузьмін Володимир Олександрович, Стаднік Яків Феодосійович
МПК: G01B 5/24
Мітки: пристрій, контролю, призмах, биття, радіального
Формула / Реферат:
Пристрій для контролю радіального биття в призмах поверхонь тіл обертання відносно їх зовнішніх базових поверхонь, що містить корпус, в якому закріплена призма і вузол притиску деталі до базових поверхонь призми, який відрізняється тим, що в ньому установлено осьовий обмежувач переміщення об'єкта, що контролюється, датчик установлено перпендикулярно до нижньої поверхні призми, а притиск виконано в чотирьох базових точках.
Пристрій для склеювання деталей літака

Номер патенту: 58618
Опубліковано: 15.08.2003
Автори: Некрасов Дмитро Валерійович, Логвиненко Юрій Олександрович, Дерке Олександр Войтехович, Науменко Павло Олегович
МПК: B64C 1/14
Мітки: літака, деталей, пристрій, склеювання
Формула / Реферат:
Пристрій для склеювання деталей літака, що містить у собі оправку, розділовий елемент і елемент для створення притискного зусилля, який відрізняється тим, що елемент для створення притискного зусилля являє собою підшипникові кульки, які знаходяться в оправці на розділовому елементі, а робочі поверхні оправки і розділового елементу повторюють форму поверхні деталей, що підлягають склеюванню.
Пристрій для орієнтації напівпровідникових пластин за базовим зрізом
Номер патенту: 42223
Опубліковано: 15.10.2001
Автори: Сорочак Олег Зіновійович, Величко Лев Дмитрович
МПК: H01L 21/68
Мітки: пристрій, базовим, орієнтації, напівпровідникових, пластин, зрізом
Формула / Реферат:
Пристрій для орієнтації напівпровідникових пластин за базовим зрізом, що містить лоток, який відрізняється тим, що додатково містить анізотропну ворсову підкладку з нахилом ворсу в сторону транспортування, встановлену на робочій поверхні лотка, а лоток виконаний вібраційним з можливістю здійснення поздовжніх гармонійних коливань.
Попередній патент: Засіб для лікування гестозу вагітних
Наступний патент: Спосіб діагностики атеросклерозу
Випадковий патент: Пристрій для очистки трубопроводів зсередини