Віброударний струшувач плодів
Номер патенту: 62202
Опубліковано: 15.12.2003
Автори: Миронюк Олег Сергійович, Крупич Олег Михайлович, Шевчук Роман Степанович, Паславський Ростислав Ігорович
Формула / Реферат
Віброударний струшувач плодів, що має інерційний лінійний збурювач коливань кривошипно-шатунного типу і кінематично з'єднаний з ним захват, затискачі якого сполучені з гідравлічним приводом і містять основи затискачів із змонтованими на них еластичними подушками та ударними механізмами у вигляді блоків пружин і упорів, який відрізняється тим, що при розгоні збурювача коливань гідроциліндри односторонньої дії приводу затискачів сполучені з напірною і зливною магістралями гідросистеми приводу затискачів через блок клапанів, регулятор тиску і запірний клапан, а під час знімання плодів сполучені через блок клапанів і дросель, роботою яких керує процесор автоматизованого управління.
Текст
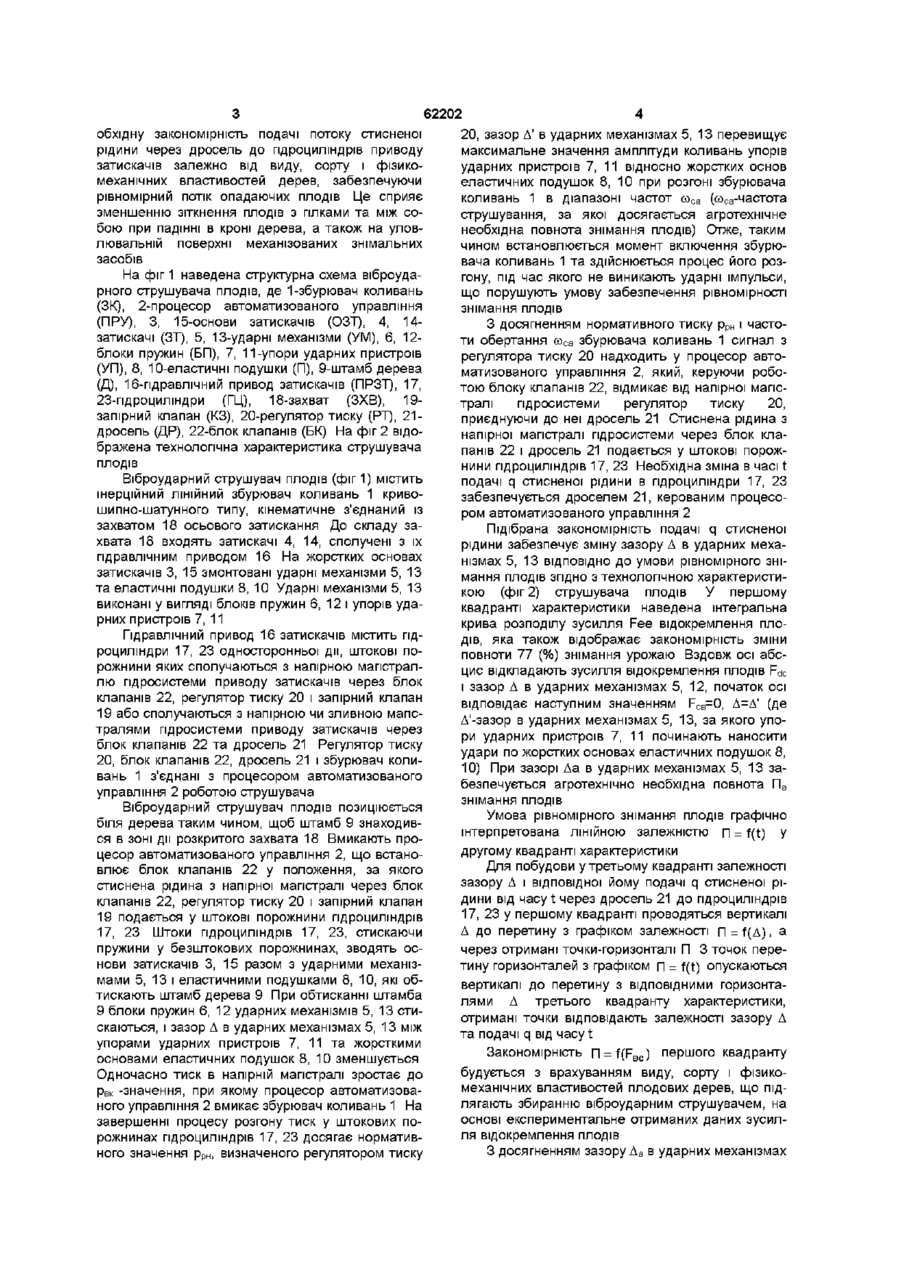
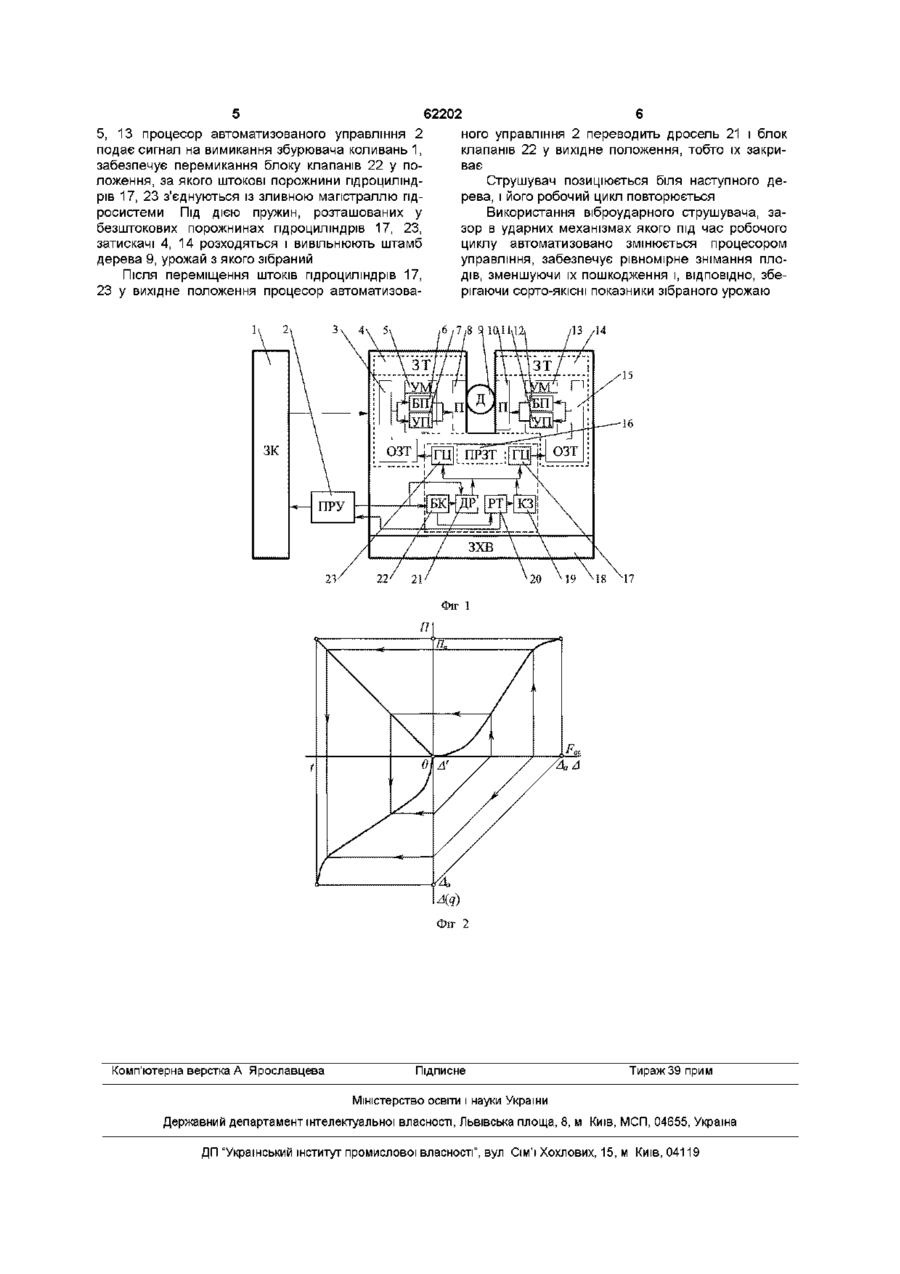
Віброударний струшувач плодів, що має інерційний ЛІНІЙНИЙ збурювач коливань кривошипношатунного типу і кінематично з'єднаний з ним за Винахід відноситься до сільськогосподарського машинобудування, зокрема до засобів механізованого знімання плодів струшуванням Відомий віброударний струшувач плодів, що має інерційний ЛІНІЙНИЙ збурювач коливань кривошипно-шатунного типу і кінематичне з'єднаний з ним захват, затискачі якого сполучені з гідравлічним приводом і містять основи затискачів із змонтованими на них еластичними подушками та ударними механізмами у вигляді блоків пружин і упорів (Ас 1690602 (СССР), кл A01D46/26 Стряхиватель плодоуборочной машины /Р С Шевчук, В И Котысько, ПК Кошляк, ОМ Крупич №4608751/15, Заявл 211188, Опубл 15 1191, Бюл №42 - с 3) У відомому віброударному струшувачі зміна частоти струшування при постійному зазорі в ударних механізмах не забезпечує рівномірного знімання плодів, оскільки в момент розгону маси струшувача частота струшування є мінімальною, а амплітуда коливань максимальною Таким чином, в початковий момент струшування дереву передаються ІСТОТНІ ударні імпульси, що викликає одночасне опадання значної КІЛЬКОСТІ ПЛОДІВ Ймові рність зіткнення плодів з основними гілками крони та між собою пропорційна їх потоку, тому в початковий момент струшування відбувається інтенсивне пошкодження опадаючих плодів В подальшому, при встановленні частоти струшування ВІДПОВІДНО до умови рівномірного знімання, плоди опадають з рівномірною інтенсивністю, що підтве хват, затискачі якого сполучені з гідравлічним приводом і містять основи затискачів із змонтованими на них еластичними подушками та ударними механізмами у вигляді блоків пружин і упорів, який відрізняється тим, що при розгоні збурювача коливань гідроциліндри односторонньої дії приводу затискачів сполучені з напірною і зливною магістралями гідросистеми приводу затискачів через блок клапанів, регулятор тиску і запірний клапан, а під час знімання плодів сполучені через блок клапанів і дросель, роботою яких керує процесор автоматизованого управління рджує необхідність регулювання збурювального зусилля у початковий момент робочого циклу струшування В основу винаходу поставлено задачу створення такого віброударного струшувача плодів, в якому автоматизована зміна подачі рідини у порожнини гідроциліндрів приводу затискачів забезпечує регулювання зазору в ударних механізмах струшувача і, ВІДПОВІДНО, збурювального зусилля, адаптованого до виду, сорту, фізико-механічних властивостей дерев і умови рівномірного знімання, що покращить ЯКІСНІ показники зібраного урожаю Поставлена задача вирішується тим, що у віброударному струшувачі плодів, що має інерційний ЛІНІЙНИЙ збурювач коливань кривошипношатунного типу і кінематичне з'єднаний з ним захват, затискачі якого сполучені з гідравлічним приводом і містять основи затискачів із змонтованими на них еластичними подушками та ударними механізмами у вигляді блоків пружин і упорів, згідно з винаходом, при розгоні збурювача коливань гідроциліндри односторонньої дії приводу затискачів сполучені з напірною і зливною магістралями гідросистеми приводу затискачів через блок клапанів, регулятор тиску і запірний клапан, а під час знімання плодів-сполучені через блок клапанів і дросель, роботою яких керує процесор автоматизованого управління Регулювання зазору в ударних механізмах при роботі струшувача здійснюється процесором автоматизованого управління, який встановлює не о (О 62202 обхідну закономірність подачі потоку стисненої рідини через дросель до гідроциліндрів приводу затискачів залежно від виду, сорту і фізикомеханічних властивостей дерев, забезпечуючи рівномірний потік опадаючих плодів Це сприяє зменшенню зіткнення плодів з гілками та між собою при падінні в кроні дерева, а також на уловлювальній поверхні механізованих знімальних засобів На фіг 1 наведена структурна схема віброударного струшувача плодів, де 1-збурювач коливань (ЗК), 2-процесор автоматизованого управління (ПРУ), 3, 15-основи затискачів (ОЗТ), 4, 14затискачі (ЗТ), 5, 13-ударні механізми (УМ), 6, 12блоки пружин (БП), 7, 11-упори ударних пристроїв (УП), 8, 10-еластичні подушки (П), 9-штамб дерева (Д), 16-пдравлічний привод затискачів (ПРЗТ), 17, 23-пдроциліндри (ГЦ), 18-захват (ЗХВ), 19запірний клапан (КЗ), 20-регулятор тиску (РТ), 2 1 дросель (ДР), 22-блок клапанів (БК) На фіг 2 відображена технологічна характеристика струшувача плодів Віброударний струшувач плодів (фіг 1) містить інерційний ЛІНІЙНИЙ збурювач коливань 1 кривошипно-шатунного типу, кінематичне з'єднаний із захватом 18 осьового затискання До складу захвата 18 входять затискачі 4, 14, сполучені з їх гідравлічним приводом 16 На жорстких основах затискачів 3, 15 змонтовані ударні механізми 5, 13 та еластичні подушки 8, 10 Ударні механізми 5, 13 виконані у вигляді блоків пружин 6, 12 і упорів ударних пристроїв 7, 11 Гідравлічний привод 16 затискачів містить гідроциліндри 17, 23 односторонньої дії, штокові порожнини яких сполучаються з напірною магістраллю гідросистеми приводу затискачів через блок клапанів 22, регулятор тиску 20 і запірний клапан 19 або сполучаються з напірною чи зливною магістралями гідросистеми приводу затискачів через блок клапанів 22 та дросель 21 Регулятор тиску 20, блок клапанів 22, дросель 21 і збурювач коливань 1 з'єднані з процесором автоматизованого управління 2 роботою струшувача Віброударний струшувач плодів позиціюється біля дерева таким чином, щоб штамб 9 знаходився в зоні дії розкритого захвата 18 Вмикають процесор автоматизованого управління 2, що встановлює блок клапанів 22 у положення, за якого стиснена рідина з напірної магістралі через блок клапанів 22, регулятор тиску 20 і запірний клапан 19 подається у штокові порожнини гідроциліндрів 17, 23 Штоки гідроциліндрів 17, 23, стискаючи пружини у безштокових порожнинах, зводять основи затискачів 3, 15 разом з ударними механізмами 5, 13 і еластичними подушками 8, 10, які обтискають штамб дерева 9 При обтисканні штамба 9 блоки пружин 6, 12 ударних механізмів 5, 13 стискаються, і зазор Д в ударних механізмах 5, 13 між упорами ударних пристроїв 7, 11 та жорсткими основами еластичних подушок 8, 10 зменшується Одночасно тиск в напірній магістралі зростає до Рвк -значення, при якому процесор автоматизованого управління 2 вмикає збурювач коливань 1 На завершенні процесу розгону тиск у штокових порожнинах гідроциліндрів 17, 23 досягає нормативного значення рРн, визначеного регулятором тиску 20, зазор Д' в ударних механізмах 5, 13 перевищує максимальне значення амплітуди коливань упорів ударних пристроїв 7, 11 відносно жорстких основ еластичних подушок 8, 10 при розгоні збурювача коливань 1 в діапазоні частот coca (соса-частота струшування, за якої досягається агротехнічне необхідна повнота знімання плодів) Отже, таким чином встановлюється момент включення збурювача коливань 1 та здійснюється процес його розгону, під час якого не виникають ударні імпульси, що порушують умову забезпечення рівномірності знімання плодів З досягненням нормативного тиску р р н і частоти обертання Юса збурювача коливань 1 сигнал з регулятора тиску 20 надходить у процесор автоматизованого управління 2, який, керуючи роботою блоку клапанів 22, відмикає від напірної магістралі гідросистеми регулятор тиску 20, приєднуючи до неї дросель 21 Стиснена рідина з напірної магістралі гідросистеми через блок клапанів 22 і дросель 21 подається у штокові порожнини гідроциліндрів 17, 23 Необхідна зміна в часі t подачі q стисненої рідини в гідроциліндри 17, 23 забезпечується дроселем 2 1 , керованим процесором автоматизованого управління 2 Підібрана закономірність подачі q стисненої рідини забезпечує зміну зазору Д в ударних механізмах 5, 13 ВІДПОВІДНО до умови рівномірного знімання плодів згідно з технологічною характеристикою (фіг 2) струшувача плодів У першому квадранті характеристики наведена інтегральна крива розподілу зусилля Fee відокремлення плодів, яка також відображає закономірність зміни повноти 77 (%) знімання урожаю Вздовж осі абсцис відкладають зусилля відокремлення плодів Fdc і зазор Д в ударних механізмах 5, 12, початок осі відповідає наступним значенням F C B -0, Д=Д' (де Д'-зазор в ударних механізмах 5, 13, за якого упори ударних пристроїв 7, 11 починають наносити удари по жорстких основах еластичних подушок 8, 10) При зазорі Да в ударних механізмах 5, 13 забезпечується агротехнічно необхідна повнота П а знімання плодів Умова рівномірного знімання плодів графічно інтерпретована ЛІНІЙНОЮ залежністю п = f(t) У другому квадранті характеристики Для побудови у третьому квадранті залежності зазору Д і відповідної йому подачі q стисненої рідини від часу t через дросель 21 до гідроциліндрів 17, 23 у першому квадранті проводяться вертикалі Д до перетину з графіком залежності п = f ( Д ) , а через отримані точки-горизонталі П 3 точок перетину горизонталей з графіком п = f(t) опускаються вертикалі до перетину з ВІДПОВІДНИМИ горизонталями Д третього квадранту характеристики, отримані точки відповідають залежності зазору Д та подачі q від часу t Закономірність n = f(F B C ) першого квадранту будується з врахуванням виду, сорту і фізикомеханічних властивостей плодових дерев, що підлягають збиранню віброударним струшувачем, на основі експериментальне отриманих даних зусилля відокремлення плодів З досягненням зазору Д а в ударних механізмах 62202 5, 13 процесор автоматизованого управління 2 ного управління 2 переводить дросель 21 і блок подає сигнал на вимикання збурювача коливань 1, клапанів 22 у вихідне положення, тобто їх закризабезпечує перемикання блоку клапанів 22 у поває ложення, за якого штокові порожнини гідроциліндСтрушувач позиціюється біля наступного дерів 17, 23 з'єднуються із зливною магістраллю гідрева, і його робочий цикл повторюється росистеми Під ДІЄЮ пружин, розташованих у Використання віброударного струшувача, забезштокових порожнинах гідроциліндрів 17, 23, зор в ударних механізмах якого під час робочого затискачі 4, 14 розходяться і вивільнюють штамб циклу автоматизовано змінюється процесором дерева 9, урожай з якого зібраний управління, забезпечує рівномірне знімання плодів, зменшуючи їх пошкодження і, ВІДПОВІДНО, збеПісля переміщення штоків гідроциліндрів 17, рігаючи сорто-якісні показники зібраного урожаю 23 у вихідне положення процесор автоматизова 15 Фіг 1 Комп'ютерна верстка А Ярославцева Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюVibroimpact fruit picker
Автори англійськоюShevchuk Roman Stepanovych, Myroniuk Oleh Serhiiovych, Paslavskyi Rostyslav Ihorovych, Krupych Oleh Mykhailovych
Назва патенту російськоюВиброударный плодосниматель
Автори російськоюШевчук Роман Степанович, Миронюк Олег Сергеевич, Паславский Ростислав Игоревич, Крупич Олег Михайлович
МПК / Мітки
МПК: A01D 46/26
Мітки: струшувач, плодів, віброударний
Код посилання
<a href="https://ua.patents.su/3-62202-vibroudarnijj-strushuvach-plodiv.html" target="_blank" rel="follow" title="База патентів України">Віброударний струшувач плодів</a>
Тросовий віброударний струшувач
Номер патенту: 32324
Опубліковано: 15.12.2000
Автори: Крупич Олег Михайлович, Семен Ярослав Васильович, Шевчук Роман Степанович
МПК: A01D 46/26
Мітки: віброударний, струшувач, тросовий
Текст:
...ВУЗ (фіг. 1) складається з ексцентрикового механізму ЕМ та з'єднаного з ним ударного механізму УМ, привод якого здійснюється гідродвигуном ГД через демпферну муфту МД, що містить 2 гумове кільце 2 (фіг.2) з металевими фігурними втулками 4. За допомогою болтового з'єднання 5 до гумового кільця кріпляться хрестовини 1 і З, які з'єднують вали гідродвигуна і ексцентрикового механізму віброударного збуджувача. Під час знімання плодів...
Струшувач плодів
Номер патенту: 39698
Опубліковано: 15.06.2001
Автори: Паславський Ростислав Ігорович, Семен Ярослав Васильович, Шевчук Роман Степанович, Крупич Олег Михайлович
МПК: A01D 46/26
Формула / Реферат:
Струшувач плодів, що містить механізм начіпки„який включає гідроциліндри горизонтального і вертикального переміщення, змонтований на ньому збурювач коливань з приводним ексцентриком, ударний механізм, з'єднаний тросом з петлею-захватом, який відрізняється тим, що він додатково оснащений регулятором тиску, виконаним у вигляді тдпружи-неного клапана, увімкненого в магістраль гідроциліндра горизонтального переміщення збурювача коливань.
Струшувач плодів і жуків
Номер патенту: 17705
Опубліковано: 16.10.2000
Автори: Скоробогатов Юрій Борисович, Канішевський Станислав Михайлович, Петрушевський Іван Іванович, Вировський Леонід Петрович, Попадюха Юрій Андрійович
МПК: A01M 5/00, A01D 46/26
Мітки: жуків, струшувач, плодів
Формула / Реферат:
Стряхиватель плодов и жуков, содержащий приемник, выполненный из двух шарнирно связанных между собой частей, образующих в закрытом положении замкнутый контур, расположенный над накопителем насекомых, и механизм управления положением частей приемника, отличающийся тем, что шарнирно связанные между собой части приемника выполнены в виде пленочных полуцилиндров и установлены на вертикальной оси, закрепленной на накопителе для насекомых,...
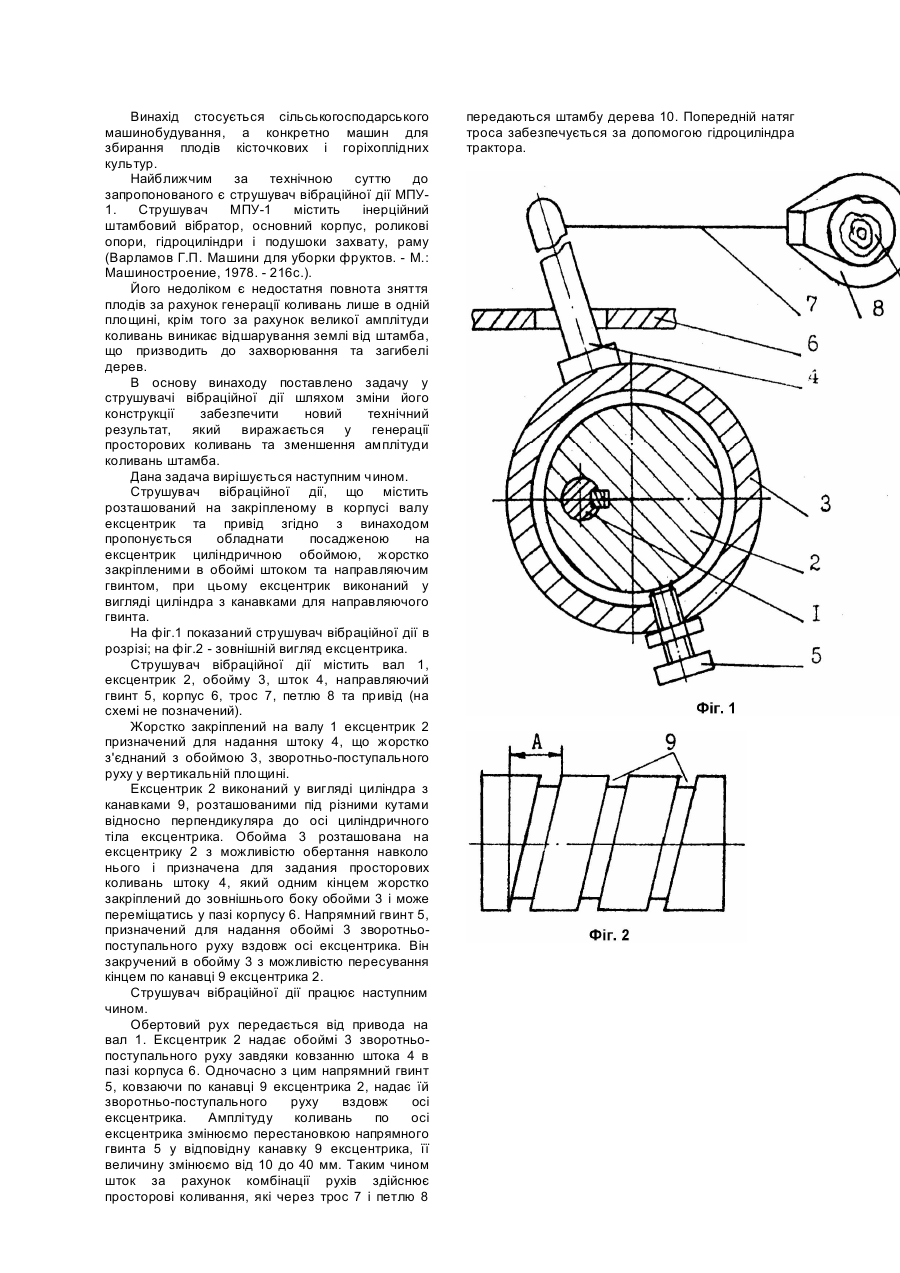
Струшувач вібраційної дії
Номер патенту: 24296
Опубліковано: 07.07.1998
Автори: Рибарук Василь Якимович, Гошко Зіновій Орестович, Гошко Маркіян Орестович
МПК: A01D 46/26
Мітки: вібраційної, дії, струшувач
Формула / Реферат:
Струшувач вібраційної дії, що містить розташований на закріпленому в корпусі валу ексцентрик та привід, який відрізняється тим, що він обладнаний вільно посадженою на ексцентрик циліндричною обоймою, жорстко закріпленими в обоймі штоком та напрямним гвинтом, причому ексцентрик виконаний у вигляді циліндра з канавками по твірній для напрямного гвинта.
Агрегат для транспортування плодів
Номер патенту: 53359
Опубліковано: 15.01.2003
Автори: Паславський Ростислав Ігорович, Миронюк Олег Сергійович, Шевчук Роман Степанович
МПК: A01D 90/00
Мітки: транспортування, агрегат, плодів
Формула / Реферат:
Агрегат для транспортування плодів, що містить мобільний енергетичний засіб та агрегатований з ним причіп, який відрізняється тим, що мобільний енергетичний засіб та причіп додатково оснащені датчиками коливань, з'єднаними з автоматизованою системою управління, яка сполучена з виконавчим механізмом зменшення подачі палива двигуна внутрішнього згоряння і сигналізатором рівнів коливань на робочому місці тракториста-машиніста й робочій платформі...
Попередній патент: Стиснуті елементи зі стрічковим армуванням
Наступний патент: Петля-захват плодозбиральної машини
Випадковий патент: Спосіб виконання панкреатодуоденальної резекції