Пристрій супроводження цілей
Номер патенту: 56901
Опубліковано: 25.01.2011
Автори: Коломійцев Олексій Володимирович, Рибалка Григорій Валерійович, Хмелевська Ольга Олександрівна, Челпанов Артем Володимирович, Квіткін Костянтин Петрович
Формула / Реферат
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування вибірок, також вузол корекції параметрів траєкторії у складі послідовно з'єднаних блока усереднення позначок, блока побудови єдиної опорної траєкторії та блока корекції, при цьому вхід блока ранжування вибірок нев'язок з'єднано із виходом блока формування вибірок нев'язок, а вихід блока тестування вибірок - із другим входом блока селекції позначок, вхід блока усереднення позначок з'єднано із виходом блока відбору позначок у стробах, а вихід блока корекції - з другим входом блока фільтрації і екстраполяції, другий, третій та четвертий виходи блока фільтрації і екстраполяції додатково з'єднані з другими входами відповідно блока формування нев'язок, блока відбору позначок у стробах та блока корекції, входом пристрою є вхід блока відбору позначок у стробах та блока корекції, входом пристрою є вхід блока відбору позначок у стробах, а виходом - вихід блока фільтрації і екстраполяції.
Текст
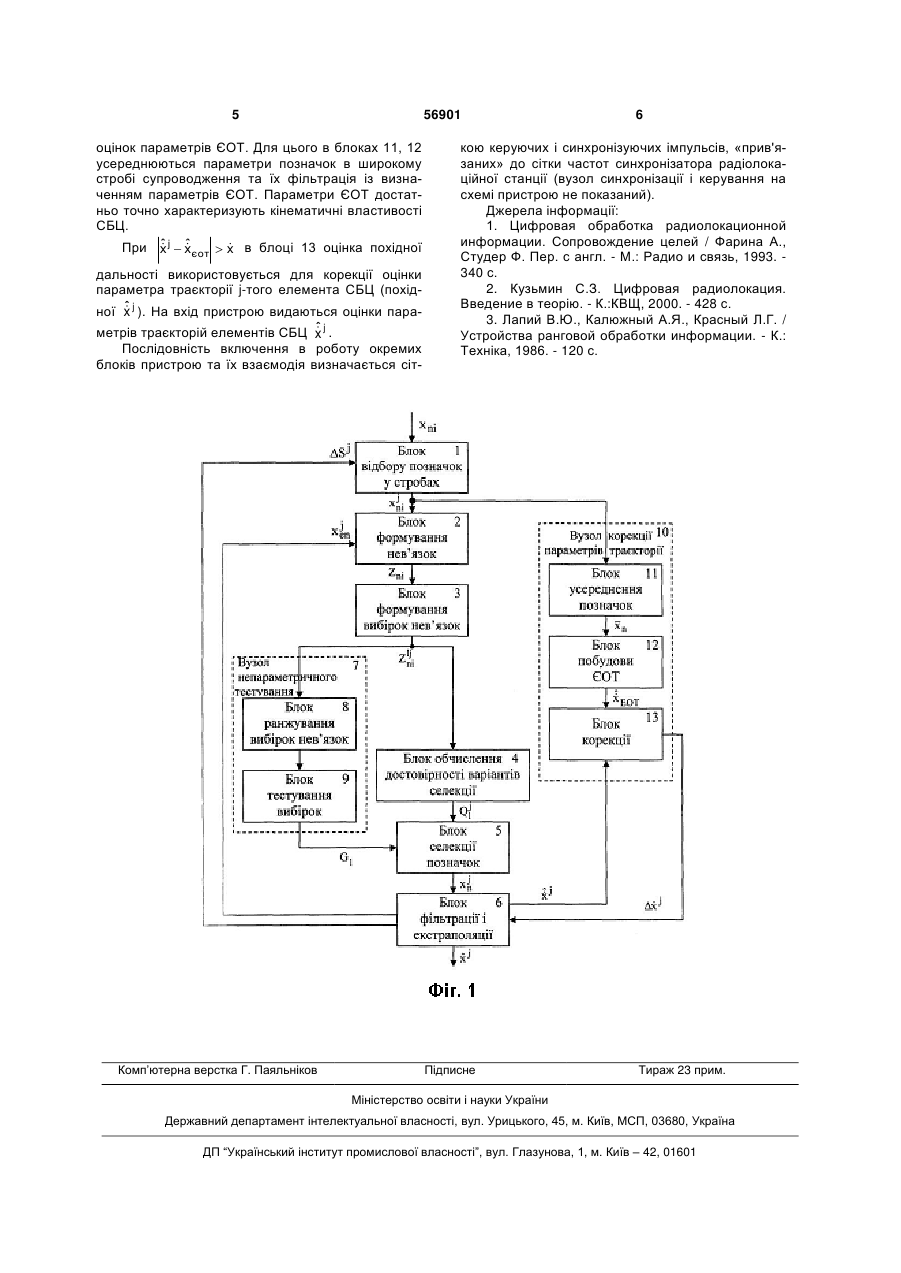
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування 3 Поставлена задача вирішується за рахунок того, що в пристрій супроводження цілей, який містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок та блока тестування вибірок, та вузол корекції параметрів траєкторії у складі послідовно з'єднаних блока усереднення позначок, блока побудови єдиної опорної траєкторії (ЄОТ) та блока корекції. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у підвищенні ефективності селекції відміток та, відповідно, підвищенні точності оцінки параметрів траєкторії. На фіг. 1 приведена структурна схема запропонованого пристрою. Запропонований пристрій супроводження цілей містить послідовно з'єднані блок відбору позначок у стробах 1, блок формування нев'язок 2, блок формування вибірок нев'язок 3, блок обчислення достовірності варіантів селекції 4, блок селекції позначок 5, блок фільтрації і екстраполяції 6, вузол непараметричного тестування 7 у складі послідовно з'єднаних блока ранжування вибірок нев'язок 8 і блока тестування вибірок 9 та вузол корекції параметрів траєкторії 10 у складі послідовно з'єднаних блока усереднення позначок 11, блока побудови ЄОТ 12 та блока корекції 13. Вхід блока ранжування вибірок нев'язок з'єднано із виходом блока формування вибірок нев’язок, а вихід блока тестування вибірок - із другим входом блока селекції позначок. Вхід блока усереднення позначок з'єднано із виходом блока відбору позначок у стробах, а вихід блока корекції - з другим входом блока фільтрації і екстраполяції. Другий, третій та четвертий виходи блока фільтрації і екстраполяції додатково з'єднані з другими входами відповідно блока формування нев'язок, блока відбору позначок у стробах та блока к лекції. Входом пристрою є вхід блока відбору позначок у стробах та блока корекції. Входом пристрою є вхід блока відбору позначок у стробах, а виходом - вихід блока фільтрації і екстраполяції. Робота запропонованого пристрою полягає у наступному. На вхід блока відбору позначок в стробах надходять позначки від елементів СБЦ xni та хибні позначки перешкод. В блоці здійснюється їх вибір в межах стробів ототожнення супроводжуваних траєкторій. Строби для кожної j-тої траєкторії S j формуються в блоці фільтрації і екстраполяції, їх розміри визначаються помилками вимірювань, екстраполяції та можливим прискоренням цілі [1]. В блоці 2 визначаються значення нев'язок - відхилення результатів вимірів координат xni від їх екстрапольованих значень xn в межах «ковзного вікна» останніх N циклів супроводження (з номерами від к-N + 1 до к): Zni xni xe (1) 56901 4 де: і - номер позначки (і відповідної нев'язки) в n-тому циклі супроводження, i 12,... n . , m Для підвищення достовірності селекції позначок в стробах розмір вікна N обирається більшим, ніж пам'ять фільтру згладжування М, тобто N M . В блоці 3 формуються вибірки нев'язок позначок відносно параметрів сyпроводжуваних траєкторій ZIj : ni Z11; Z11; Z11; 2i Ni 1i (2) , LJ LJ LJ Z1i ; Z2i ; ZNi де: 1, j - відповідно номер 1-тої вибірки нев'язок відносно параметрів траєкторії j-того елемента СБЦ, 1 = 1,2, ...J. Загальна кількість вибірок дорівнюється L J . Критерієм достовірності вибірки позначок для j-тої траєкторії (з номером I d ) є мінімум сумарної дисперсії нев'язок: ZIj ni j I dпри Qd min QIj , j де: Qd IL k (3) 1 ( ZIj )2 N 1 n k N1ni Обчислення достовірності здійснюється в блоці 4. За наявності перешкод, та якщо розподіл помилок вимірювання відрізняється від нормального, більш ефективними можуть бути н< параметричні методи аналізу [3]. Тому в пристрої здійснюється перевірка достовірності отриманих вибірок нев'язок та їх тестування (блоки 8, 9): RIi k o sgn( ZIni Zni ) (4) n k N1 де: R Ii - ранги елементів досліджуваної вибірки нев'язок o Z ni - елементи опорної вибірки (решта вибірок нев'язок). Для прийняття рішення доцільно використовувати тест рангової кореляції: N CI i RIi (5) i 1 j Тоді I dпри Qd min QIj . IL (6) Даний тест забезпечує перевагу вибірок із мінімальними нев'язками та якщо вони зменшуються за час супроводження цілей. Кінцеве прийняття рішення (селекція позначок) з урахуванням параметричних та непараметричних методів обробки здійснюється в блоці 5 відповідно із співвідношеннями (3) і (6). Отримані вибірки позначок надходять на блок 6, де фільтруються із визначенням оцінок параметрів траєкторій елементів СБЦ. У випадку розходження фільтру супроводженˆ ня, коли оцінка параметру похідної координати x j значно відрізняється від її реального значення, здійснюється корекція оцінки параметрів траєкторій елементів балістичної цілі з використанням 5 56901 оцінок параметрів ЄОТ. Для цього в блоках 11, 12 усереднюються параметри позначок в широкому стробі супроводження та їх фільтрація із визначенням параметрів ЄОТ. Параметри ЄОТ достатньо точно характеризують кінематичні властивості СБЦ. ˆ ˆ При x j x x в блоці 13 оцінка похідної єот дальності використовується для корекції оцінки параметра траєкторії j-того елемента СБЦ (похідˆ ної x j ). На вхід пристрою видаються оцінки пара ˆ метрів траєкторій елементів СБЦ x j . Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначається сіт Комп’ютерна верстка Г. Паяльніков 6 кою керуючих і синхронізуючих імпульсів, «прив'язаних» до сітки частот синхронізатора радіолокаційної станції (вузол синхронізації і керування на схемі пристрою не показаний). Джерела інформації: 1. Цифровая обработка радиолокационной информации. Сопровождение целей / Фарина А., Студер Ф. Пер. с англ. - М.: Радио и связь, 1993. 340 с. 2. Кузьмин С.З. Цифровая радиолокация. Введение в теорію. - К.:КВЩ, 2000. - 428 с. 3. Лапий В.Ю., Калюжный А.Я., Красный Л.Г. / Устройства ранговой обработки информации. - К.: Техніка, 1986. - 120 с. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for target tracking
Автори англійськоюChelpanov Artem Volodymyrovych, Khmelevska Olha Oleksandrivna, Kvitkin Kostiantyn Petrovych, Rybalka Hryhorii Valeriiovych, Kolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюУстройство сопровождения целей
Автори російськоюЧелпанов Артем Владимирович, Хмелевская Ольга Александровна, Квиткин Константин Петрович, Рибалка Григорий Валерьевич, Коломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: пристрій, супроводження, цілей
Код посилання
<a href="https://ua.patents.su/3-56901-pristrijj-suprovodzhennya-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій супроводження цілей</a>
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Сірик Юрій Анатолійович, Коваль Олександр Андрійович, Яровий Сергій Володимирович, Челпанов Артем Володимирович, Пащенко Руслан Едуардович, Карлов Володимир Дмитрийович
МПК: G01S 13/00, G01S 13/52
Мітки: адаптивний, маневруючих, супроводу, пристрій, цілей
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Яровий Сергій Володимирович, Петрушенко Миколай Миколайович, Челпанов Артем Володимирович, Карлов Володимир Дмитрийович, Рафальський Юрій Іванович
МПК: G01S 13/52
Мітки: пристрій, фільтрації, цілей, параметрів, адаптивний, траєкторії
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Челпанов Артем Володимирович, Ворошилов Сергій Вікторович, Піскунов Станіслав Миколайович, Смоляков Денис Олександрович
МПК: G01S 13/52
Мітки: траєкторії, рекурентної, цілі, пристрій, фільтрації, параметрів
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Пристрій фазового виявлення цілей
Номер патенту: 31013
Опубліковано: 25.03.2008
Автори: Шматков Сергій Ігорович, Челпанов Володимир Валентинович, Лазутський Анатолій Федорович
МПК: G01S 13/52
Мітки: фазового, виявлення, пристрій, цілей
Формула / Реферат:
Пристрій фазового виявлення цілей, що містить послідовно з'єднані блок попередньої обробки, блок фазовимірювача, блок обчислювання розкиду фаз та пороговий блок, який відрізняється тим, що додатково введені блок віднімання, послідовно з'єднані блок вимірювання дальності і блок формування імпульсів запуску та вузол цифрового корелятора у складі послідовно з'єднаних блока пам'яті, блока корелятора та блока аналізу, при цьому вхід блока...
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра
Номер патенту: 45923
Опубліковано: 15.04.2002
Автори: Говоров Валентін Сергійович, Пузанов Денис Михайлович
МПК: G09G 1/14
Мітки: растра, синтезованих, малоформатного, елементів, позначок, розкладання, орієнтованих, відображення, напрямком, телевізійного, пристрій, цілей, умовних
Формула / Реферат:
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра, що містить перший, другий і третій регістри, перший і другий перетворювачі код-напруга, перетворювач код-часовий інтервал, цифровий двійковий лічильник і тригер, який відрізняється тим, що він доповнений блоком кеш-пам'яті, блоком постійної пам'яті, цифровим двійковим лічильником з попереднім...
Попередній патент: Маятниковий прилад визначення кутів тангажа і крену рухомого об’єкта (двокоординатний маятник карпачева)
Наступний патент: Пристрій для регулювання кута атаки лопатей вітродвигуна та стабілізації його обертів
Випадковий патент: Спосіб захисту вимірювального пристрою від навмисного порушення роботи