Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля
Номер патенту: 63957
Опубліковано: 25.10.2011
Формула / Реферат
Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля, в якому положення точки центру мас напівпричепа вантажного автомобіля визначають за формулою:
![]() ,
,
де αу - допустиме бічне прискорення, частин g;
g - прискорення вільного падіння м/с2;
сШ - вертикальна жорсткість шини, кН/м;
В - розрахункова величина колії, мм;
FО - осьове навантаження, кН;
θНП - кут нахилу непідресорених мас, рад,
який відрізняється тим, що спочатку розраховують кут нахилу непідресорених мас θНП для максимально допустимого завантаження напівпричепа вантажного автомобіля за формулою ![]() , де
, де ![]() - підресорена маса, кг,
- підресорена маса, кг, ![]() - непідресорена маса, кг, визначають кут перекидання ψП при допустимому бічному прискоренні αу за формулою
- непідресорена маса, кг, визначають кут перекидання ψП при допустимому бічному прискоренні αу за формулою ![]() , визначають кут нахилу підресореної маси θП за формулою θП = ψп – θНП, за отриманими розрахунками будують зображення, за яким визначають дійсне положення точки центру мас при розрахунковому завантаженні напівпричепа вантажного автомобіля.
, визначають кут нахилу підресореної маси θП за формулою θП = ψп – θНП, за отриманими розрахунками будують зображення, за яким визначають дійсне положення точки центру мас при розрахунковому завантаженні напівпричепа вантажного автомобіля.
Текст
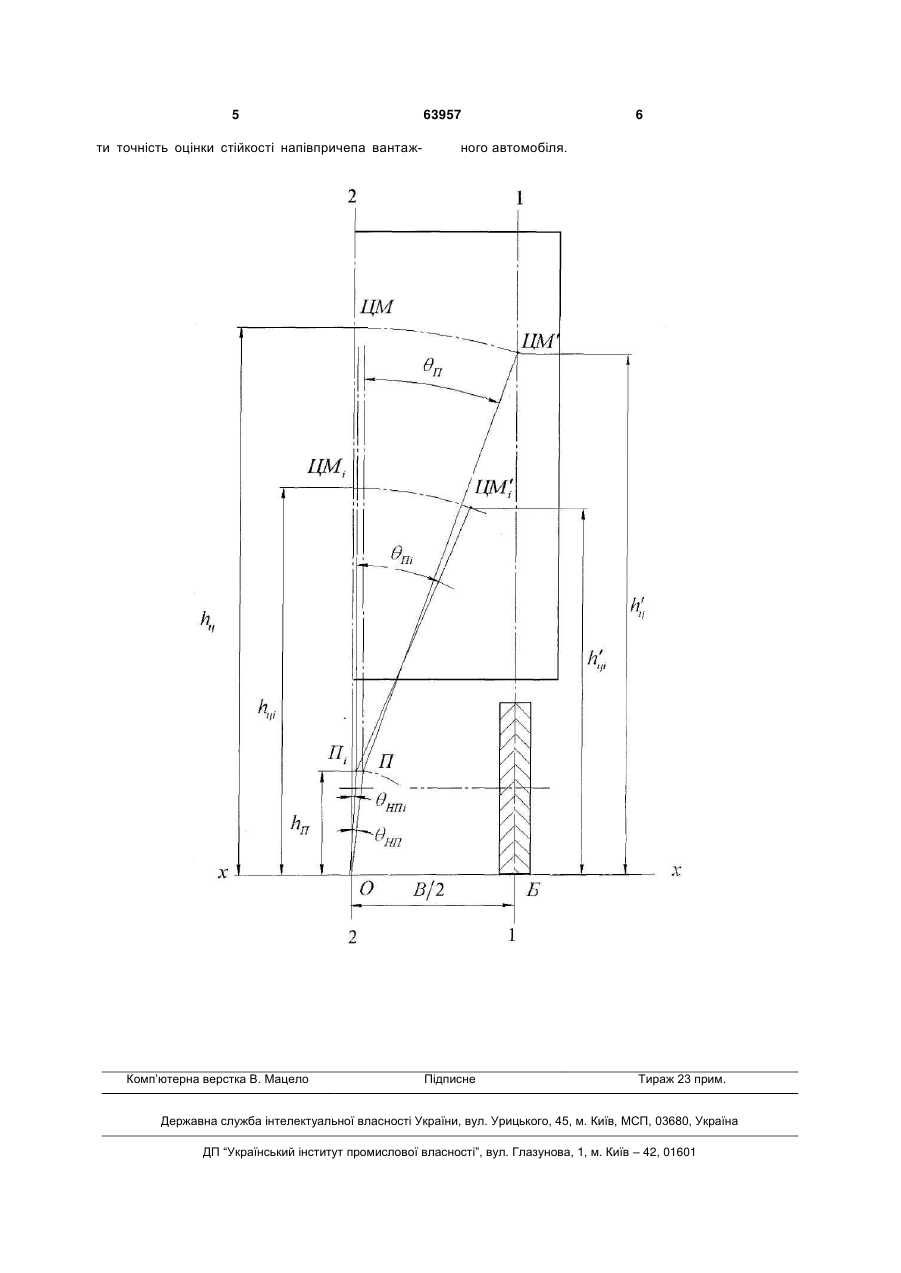
Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля, в якому положення точки центру мас напівпричепа вантажного автомобіля визначають за формулою: hц c Ш (B / 2)2 НП , FО у θНП - кут нахилу непідресорених мас, рад, який відрізняється тим, що спочатку розраховують кут нахилу непідресорених мас θНП для максимально допустимого завантаження напівпричепа вантажного автомобіля за формулою (m n m нn ) g НП , де mn - підресорена маса, кг, сШ В mнn - непідресорена маса, кг, визначають кут перекидання ψП при допустимому бічному приско ренні αу за формулою П arctg у , визнача g ють кут нахилу підресореної маси θП за формулою θП = ψп – θНП, за отриманими розрахунками будують зображення, за яким визначають дійсне положення точки центру мас при розрахунковому завантаженні напівпричепа вантажного автомобіля. (11) UA Відомий спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим та визначення величини вертикальних навантажень на кожне із коліс при прямолінійному нерівномірному русі, за якими визначають положення центра мас у вертикальній площині, змінюють рух на прямолінійний рівномірний, визначають зміну тиску повітря в кожній шині коліс, за якою - величин вертикальних навантажень на кожне із коліс, за якими визначають координати центра мас у горизонтальній площині [Патент України № U200904203, К. кл. В60С23/00, опубл. 25.06.09]. Недоліками таких способів є необхідність у спеціальному обладнанні та фінансові втрати, пов'язані із простоєм напівпричепа вантажного автомобіля. Найбільш близьким технічним рішенням є спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля [Patent US № US 6,370,938 Bl, W., DC, int. cl. G01B3/30, Date of Patent: Apr. 16, 2002], при якому положення точки (19) Корисна модель належить до галузі вимірювань, зокрема до випробовування транспортних засобів. Відомий спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля, при якому напівпричіп вантажного автомобіля кріплять до стола з балансувальною опорою і вантажними площадками, урівноважують щодо балансувальної опори і вантажних площадок, послідовно повертають на 90° навколо заданих осей, урівноважують у цих положеннях і визначають статичні моменти напівпричепа вантажного автомобіля щодо трьох взаємно перпендикулярних площин. Напівпричіп вантажного автомобіля додатково повертають на 90° навколо однієї з даних осей, урівноважують у цьому положенні і визначають додатковий статичний момент напівпричепа вантажного автомобіля. Повороти здійснюють навколо осі, зміщеної на задану відстань щодо вертикальної осі балансувальної опори [Патент РФ № 2027159, М. кл. G01M1/12, опубл. 20.01.95]. 63957 (13) де αу - допустиме бічне прискорення, частин g; 2 g - прискорення вільного падіння м/с ; сШ - вертикальна жорсткість шини, кН/м; В - розрахункова величина колії, мм; FО - осьове навантаження, кН; 2 U 1 3 центру мас напівпричепа вантажного автомобіля визначають за формулою: hц c Ш (B / 2)2 НП , FО у де у - допустиме бічне прискорення, частин g; 2 g - прискорення вільного падіння м/с ; сШ - вертикальна жорсткість шини, кН/м; В - розрахункова величина колії, мм; FО - осьове навантаження, кН; θНП - кут нахилу непідресорених мас, рад. Недоліками відомого способу визначення положення точки центру мас напівпричепа вантажного автомобіля є те, що при визначенні положення точки центру мас напівпричепа вантажного автомобіля не враховується кут нахилу підресорених мас. В основу корисної моделі поставлено задачу створення такого способу, в якому шляхом розрахунку кута нахилу не підресорених мас θНП для максимально допустимого завантаження, визначення кута перекидання ψп при допустимому бічному прискоренні αу, визначення кута нахилу підресореної маси θП, визначення положення точки центру мас напівпричепа вантажного автомобіля hц в стані рівноваги, графічного зображення у масштабі одержаних величин, враховується кут нахилу підресорених мас напівпричепа вантажного автомобіля, що сприяє підвищенню точності визначення положення точки центру мас напівпричепа вантажного автомобіля. Поставлена задача вирішується тим, що в способі визначення положення точки центру мас напівпричепа вантажного автомобіля, положення точки центру мас напівпричепа вантажного автомобіля визначають за формулою: hц c Ш (B / 2)2 НП , FО у де у - допустиме бічне прискорення, частин g; 2 g - прискорення вільногопадіння м/с ; сШ - вертикальна жорсткість шини, кН/м; В - розрахункова величина колії, мм; FО - осьове навантаження, кН; θНП - кут нахилу непідресорених мас, рад, спочатку розраховують кут нахилу непідресорених мас θНП для максимально допустимого завантаження напівпричепа вантажного автомобіля (m n m нn ) g за формулою НП , де mn - підресШ В сорена маса, кг, mнn - непідресорена маса, кг, визначають кут перекидання ψП при допустимому бічному прискоренні у за формулою П arctg у , визначають кут нахилу підресо g реної маси θп за формулою θП = ψп – θНП, за отриманими розрахунками будують зображення, за яким визначають дійсне положення точки центру мас при розрахунковому завантаженні напівпричепа вантажного автомобіля. На кресленні представлено схему визначення положення точки центру мас напівпричепа вантажного автомобіля. 63957 4 Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля здійснюється наступним чином. Розраховують кут нахилу непідресорених мас θНП: (m n m нn ) g НП , сШ В де mn - підресорена маса, кг; mнn - непідресорена маса, кг. Розраховують кут перекидання ψп при допустимому бічному прискоренні у: П arctg у . g Розраховують кут нахилу підресореної маси θп: θп =ψП- θНП. Визначають положення точки центру мас напівпричепа вантажного автомобіля hц в стані рівноваги: hц c Ш (B / 2)2 НП . FО у Графічно зображають у масштабі одержані величини. На лінії х – х відмічають точку О. По горизонталі з точки О відкладають половину ширини колії напівпричепа та одержують точку Б, через яку проводять перпендикуляр до опорної поверхні дороги 1-1. Лінія 1 - 1 є лінією порогу статичного перекидання. Через точку О проводять перпендикуляр до опорної поверхні дороги - лінію 2 - 2, на якій відмічають розраховану висоту точки центру мас hц. З точки О проводять дугу радіусом hц до перетину з лінією 1-1. Точка перетину і є дійсним положенням точки центра мас ЦМ' напівпричепа, при якому відбувається відрив коліс від опорної поверхні дорожнього покриття та перекидання напівпричепа. В разі положення точки центра мас ЦМі` напівпричепа за лінією 1-1 може відбутись перекидання напівпричепа. Відстань h`ц є вертикальною координатою дійсного положення точки центру мас напівпричепа при нахилі його платформи при допустимому максимальному навантаженні. Через точку ЦМ' під кутом θп та з точки О під кутом θНП, відносно лінії 2-2, проводять прямі. Точка перетину буде точкою перекидання 77 напівпричепа вантажного автомобіля при нахилі його платформи. Після цього за формулами розраховують відповідні величини для розрахункового завантаження. З точки О проводять лінію під кутом θНПі до перетину з дугою радіусом hп та одержують точку Пі, з якої проводять лінію під кутом 9Пі до перетину з дугою радіусом θПі. В результаті одержують дійсне положення центру мас ЦМ' для розрахункового завантаження платформи напівпричепа. Відстань hці є вертикальною координатою дійсного положення точки центру мас ЦМ`i при розрахунковому завантаженні напівпричепа. Застосування заявленого способу визначення положення точки центр мас напівпричепа вантажного автомобіля дозволить підвищити точність визначення положення точки центру мас напівпричепа вантажного автомобіля і тим самим підвищи 5 ти точність оцінки стійкості напівпричепа вантаж Комп’ютерна верстка В. Мацело 63957 6 ного автомобіля. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of position of center of masses of a semi-trailer of a truck
Автори англійськоюPoliakov Andrii Pavlovych, Hrechaniuk Mykola Serhiiovych
Назва патенту російськоюСпособ определения положения точки центра масс полуприцепа грузового автомобиля
Автори російськоюПоляков Андрей Павлович, Гречанюк Николай Сергеевич
МПК / Мітки
МПК: G01M 17/00
Мітки: автомобіля, положення, напівпричепа, центру, спосіб, точки, мас, визначення, вантажного
Код посилання
<a href="https://ua.patents.su/3-63957-sposib-viznachennya-polozhennya-tochki-centru-mas-napivprichepa-vantazhnogo-avtomobilya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення точки центру мас напівпричепа вантажного автомобіля</a>
Пневматична підвіска напівпричепа вантажного автомобіля

Номер патенту: 59949
Опубліковано: 10.06.2011
Автор: Гречанюк Микола Сергійович
МПК: B60G 15/00
Мітки: підвіска, автомобіля, напівпричепа, пневматична, вантажного
Формула / Реферат:
Пневматична підвіска напівпричепа вантажного автомобіля, яка складається з перепускного клапана односторонньої дії; об'єднаного повітропроводом з балоном-ресивером, причому балон-ресивер містить кран для скидання конденсату та контрольний вивід для вимірювання тиску в балоні-ресивері, магістрального фільтра, з'єднаного повітропроводом з краном рівня підлоги та балоном-ресивером, пневматичних балонів, з'єднаних через контрольні виводи з...
Підвіска кабіни вантажного автомобіля
Номер патенту: 3063
Опубліковано: 15.10.2004
Автор: Коваленко Леонід Володимирович
МПК: B60G 25/00
Мітки: автомобіля, вантажного, кабіни, підвіска
Формула / Реферат:
1. Підвіска кабіни вантажного автомобіля, що містить дві передні і дві задні опори, виконані з можливістю закріплення на рамі автомобіля, яка відрізняється тим, що підвіска додатково містить ложемент рамної конструкції, виконаний з можливістю з'єднання з опорними фланцями днища кабіни і закріплений на верхніх кінцях опор, при цьому верхні точки опор розташовані вище опорних фланців днища кабіни.2. Підвіска кабіни за п. 1, яка...
Передня підвіска вантажного автомобіля
Номер патенту: 50791
Опубліковано: 15.11.2002
Автори: Капліна Світлана Сергіївна, Ратков Леонід Димитрович
МПК: B60G 11/02
Мітки: підвіска, вантажного, автомобіля, передня
Формула / Реферат:
1. Передня підвіска вантажного автомобіля, що містить два пружних елементи у вигляді пакетів листових ресор, закріплених на рамі симетрично поздовжній осі автомобіля і прикріплених до поперечної балки передньої осі за допомогою стрем'янок, два амортизатори, кожний з яких верхнім кінцем закріплений на рамі, стабілізатор поперечної стійкості, розміщений перпендикулярно поздовжній осі автомобіля, який включає стержень і важелі, і два кронштейни,...
Пристрій для кріплення бічного обтічника до рами вантажного автомобіля

Номер патенту: 3050
Опубліковано: 15.10.2004
Автор: Гардаш Олександр Вікторович
МПК: B62D 25/00, B62D 27/00, B60R 13/04
Мітки: бічного, рами, обтічника, автомобіля, кріплення, вантажного, пристрій
Формула / Реферат:
1. Пристрій для кріплення бічного обтічника до рами вантажного автомобіля, що включає розміщені між рамою і внутрішньою поверхнею обтічника щонайменше чотири -подібних уловлювачі, встановлених попарно в зоні верхніх і нижніх крайок обтічника, і відповідну їм кількість контактних елементів, розміщених і виконаних з можливістю встановлення їх в уловлювачах, при цьому нижні...
Кабіна вантажного автомобіля

Номер патенту: 47020
Опубліковано: 11.01.2010
Автори: Конюхов Володимир Дмитрович, Шабанов Олександр Вікторович
МПК: B60P 3/32, B66C 23/00
Мітки: кабіна, автомобіля, вантажного
Формула / Реферат:
Кабіна вантажного автомобіля, що розташована на його ходовій частині, містить салон, дах, сидіння для водія та пасажирів, дверцята по обидва боки, переднє вітрове вікно, бокові і заднє вікна, яка відрізняється тим, що кабіна утворена подовженням даху і введенням додаткового салону, в якому розташовані додаткові сидіння з подушками і спинками, встановленими на каркасі і жорстко зв'язаними з поперечиною на ходовій частині, а простір під...
Попередній патент: Двотактний симетричний підсилювач струму
Наступний патент: Гідроімпульсний віброударний пристрій для радіального та осьового віброточіння зі вбудованим генератором імпульсів тиску
Випадковий патент: Лакофарбне покриття та спосіб його одержання