Спосіб управління літальним апаратом
Номер патенту: 32455
Опубліковано: 15.12.2000
Автори: Доценко Борис Іванович, Семенов Леонід Антонович, Коростельов Олег Петрович, Бондарчук Павло Степанович, Корольов Анатолій Миколайович, Шепелев Юрій Іванович, Яковенко Петро Олексійович, Смішко Григорій Павлович, Косовенко Євген Вікторович, Кузьмін В'ячеслав Павлович
Текст
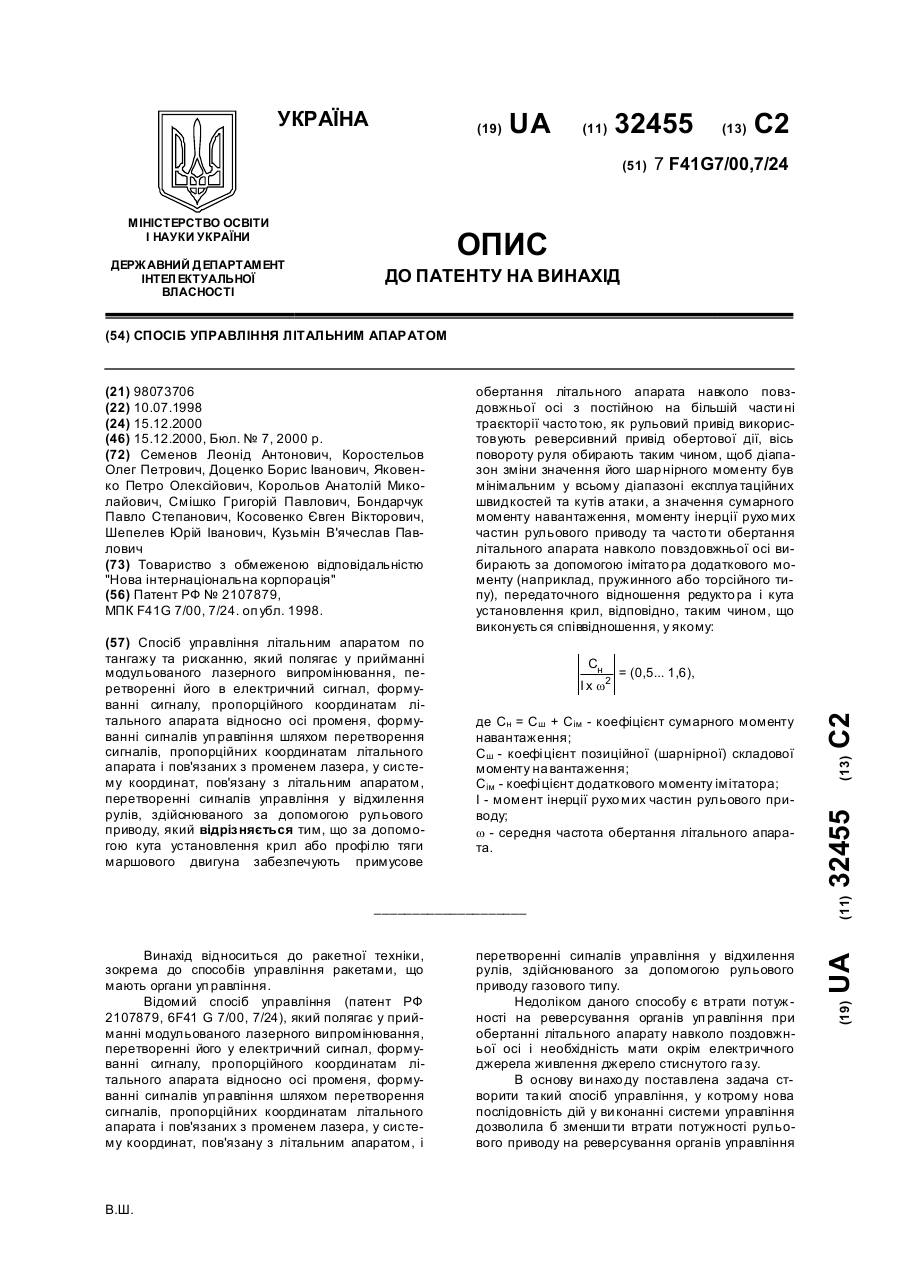
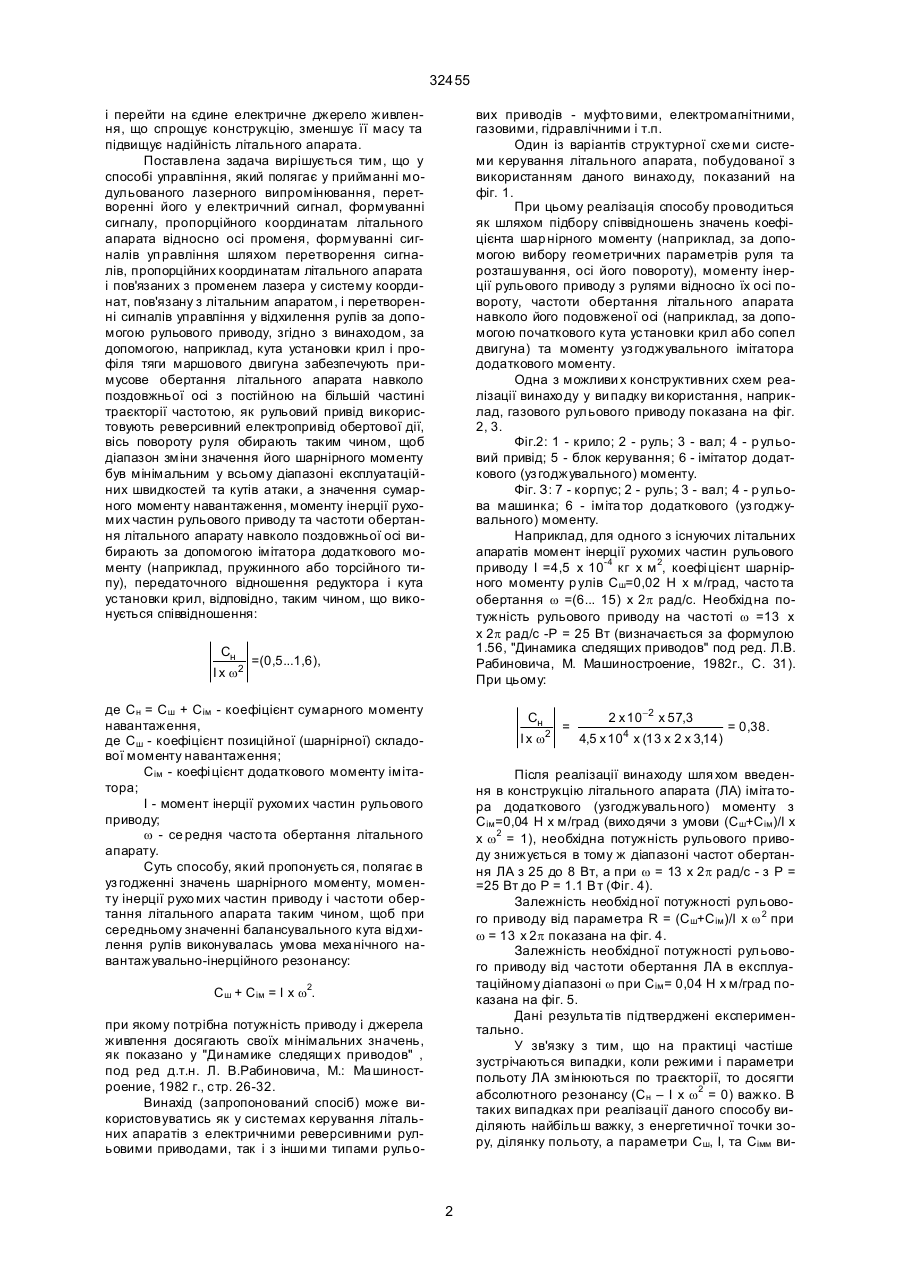
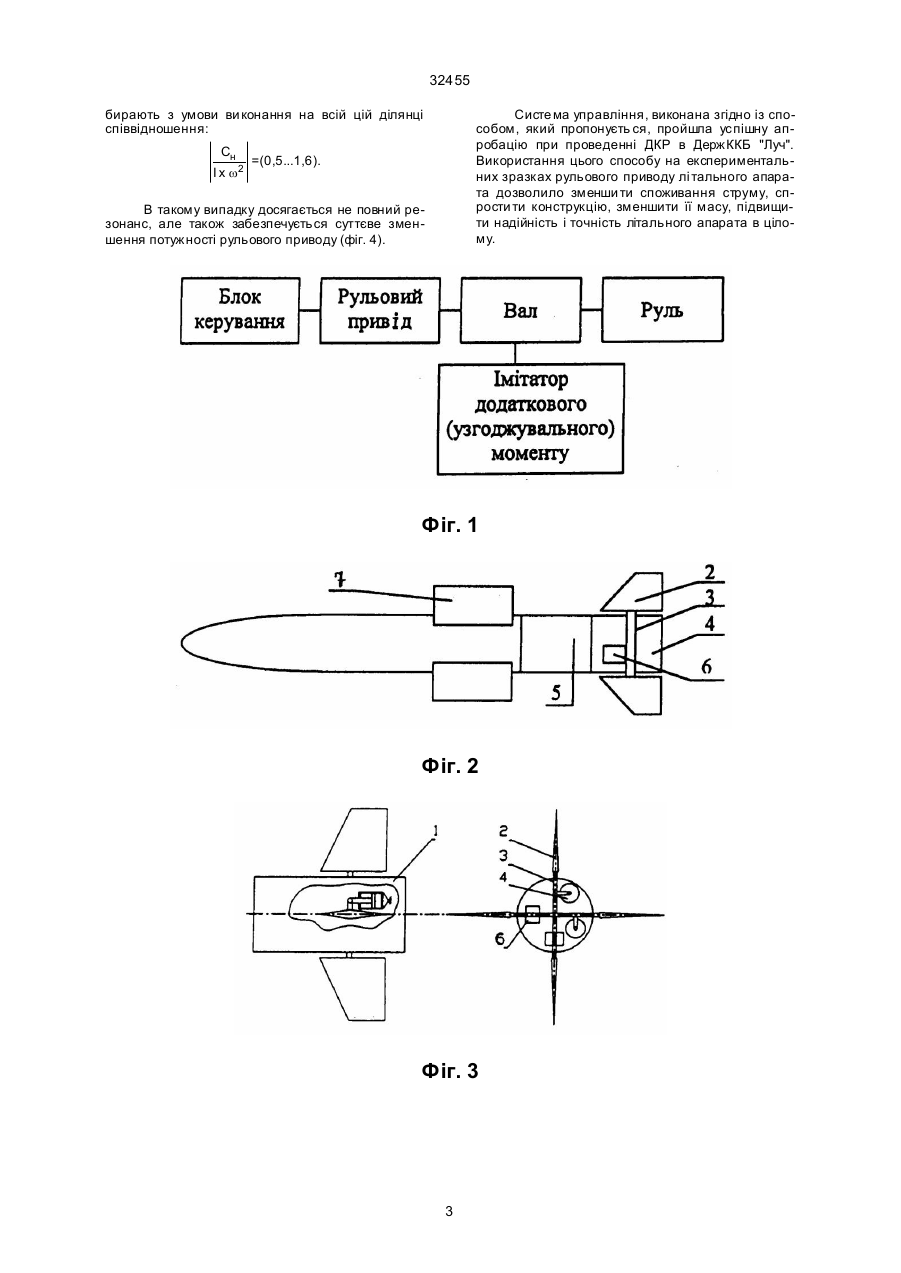
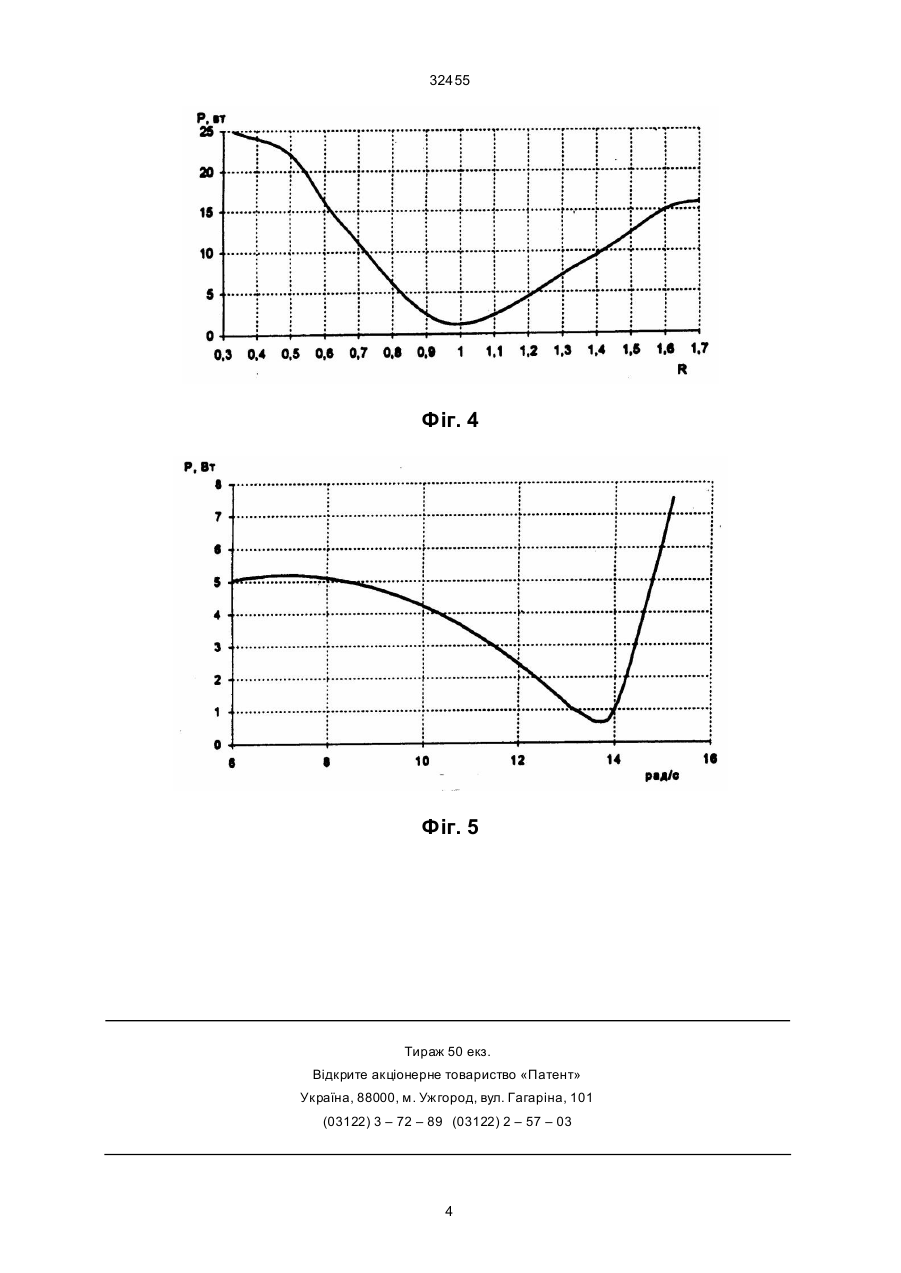
Спосіб управління літальним апаратом по тангажу та рисканню, який полягає у прийманні модульованого лазерного випромінювання, перетворенні його в електричний сигнал, формуванні сигналу, пропорційного координатам літального апарата відносно осі променя, формуванні сигналів уп равління шляхом перетворення сигналів, пропорційних координатам літального апарата і пов'язаних з променем лазера, у систему координат, пов'язану з літальним апаратом, перетворенні сигналів управління у відхилення рулів, здійснюваного за допомогою рульового приводу, який відрізняється тим, що за допомогою кута установлення крил або профі лю тяги маршового двигуна забезпечують примусове обертання літального апарата навколо повздовжньої осі з постійною на більшій части ні траєкторії часто тою, як рульовий привід використовують реверсивний привід обертової дії, вісь повороту руля обирають таким чином, щоб діапазон зміни значення його шар нірного моменту був мінімальним у всьому діапазоні експлуа таційних швидкостей та кутів атаки, а значення сумарного моменту навантаження, моменту інерції рухо мих частин рульового приводу та часто ти обертання літального апарата навколо повздовжньої осі вибирають за допомогою імітато ра додаткового моменту (наприклад, пружинного або торсійного типу), передаточного відношення редукто ра і кута установлення крил, відповідно, таким чином, що виконуєть ся співвідношення, у якому: (19) (21) 98073706 (22) 10.07.1998 (24) 15.12.2000 (46) 15.12.2000, Бюл. № 7, 2000 р. (72) Семенов Леонід Антонович, Коростельов Олег Петрович, Доценко Борис Іванович, Яковенко Петро Олексійович, Корольов Анатолій Миколайович, Смішко Григорій Павлович, Бондарчук Павло Степанович, Косовенко Євген Вікторович, Шепелев Юрій Іванович, Кузьмін В'ячеслав Павлович (73) Товариство з обмеженою відповідальністю "Нова інтернаціональна корпорація" (56) Патент РФ № 2107879, МПК F41G 7/00, 7/24. оп убл. 1998. 32455 і перейти на єдине електричне джерело живлення, що спрощує конструкцію, зменшує її масу та підвищує надійність літального апарата. Поставлена задача вирішується тим, що у способі управління, який полягає у прийманні модульованого лазерного випромінювання, перетворенні його у електричний сигнал, формуванні сигналу, пропорційного координатам літального апарата відносно осі променя, формуванні сигналів уп равління шляхом перетворення сигналів, пропорційних координатам літального апарата і пов'язаних з променем лазера у систему координат, пов'язану з літальним апаратом, і перетворенні сигналів управління у відхилення рулів за допомогою рульового приводу, згідно з винаходом, за допомогою, наприклад, кута установки крил і профіля тяги маршового двигуна забезпечують примусове обертання літального апарата навколо поздовжньої осі з постійною на більшій частині траєкторії частотою, як рульовий привід використовують реверсивний електропривід обертової дії, вісь повороту руля обирають таким чином, щоб діапазон зміни значення його шарнірного моменту був мінімальним у всьому діапазоні експлуатаційних швидкостей та кутів атаки, а значення сумарного моменту навантаження, моменту інерції рухомих частин рульового приводу та частоти обертання літального апарату навколо поздовжньої осі вибирають за допомогою імітатора додаткового моменту (наприклад, пружинного або торсійного типу), передаточного відношення редуктора і кута установки крил, відповідно, таким чином, що виконується співвідношення: Cн I x w2 вих приводів - муфто вими, електромагнітними, газовими, гідравлічними і т.п. Один із варіантів структурної схе ми системи керування літального апарата, побудованої з використанням даного винахо ду, показаний на фіг. 1. При цьому реалізація способу проводиться як шляхом підбору співвідношень значень коефіцієнта шар нірного моменту (наприклад, за допомогою вибору геометричних параметрів руля та розташування, осі його повороту), моменту інерції рульового приводу з рулями відносно їх осі повороту, частоти обертання літального апарата навколо його подовженої осі (наприклад, за допомогою початкового кута установки крил або сопел двигуна) та моменту уз годжувального імітатора додаткового моменту. Одна з можливи х конструктивних схем реалізації винахо ду у ви падку ви користання, наприклад, газового рульового приводу показана на фіг. 2, 3. Фіг.2: 1 - крило; 2 - руль; 3 - вал; 4 - р ульовий привід; 5 - блок керування; 6 - імітатор додаткового (уз годжувального) моменту. Фіг. З: 7 - корпус; 2 - руль; 3 - вал; 4 - р ульова машинка; 6 - іміта тор додаткового (уз годжувального) моменту. Наприклад, для одного з існуючих літальних апаратів момент інерції рухомих частин рульового приводу І =4,5 х 10-4 кг х м 2, коефі цієнт шарнірного моменту р улів Сш=0,02 Н х м/град, часто та обертання w =(6... 15) х 2p рад/с. Необхідна потужність рульового приводу на частоті w =13 х х 2p рад/с -Р = 25 Вт (визначається за формулою 1.56, "Динамика следящих приводов" под ред. Л.В. Рабиновича, М. Машиностроение, 1982г., С. 31). При цьому: =(0,5...1,6), де Сн = Сш + Сім - коефіцієнт сумарного моменту навантаження, де Сш - коефіцієнт позиційної (шарнірної) складової моменту навантаження; Сім - коефі цієнт додаткового моменту імітатора; І - момент інерції рухомих частин рульового приводу; w - се редня часто та обертання літального апарату. Суть способу, який пропонуєть ся, полягає в уз годженні значень шарнірного моменту, моменту інерції рухо мих частин приводу і частоти обертання літального апарата таким чином, щоб при середньому значенні балансувального кута відхилення рулів виконувалась умова меха нічного навантажувально-інерційного резонансу: Cн I x w2 = 2 x 10 -2 x 57,3 4,5 x 10 4 x (13 x 2 x 3,14 ) = 0,38. Після реалізації винаходу шля хом введення в конструкцію літального апарата (ЛА) іміта тора додаткового (узгоджувального) моменту з Cім =0,04 Н х м/град (вихо дячи з умови (Сш+Сім )/І х х w2 = 1), необхідна потужність рульового приводу знижується в тому ж діапазоні частот обертання ЛА з 25 до 8 Вт, а при w = 13 х 2p рад/с - з Р = =25 Вт до Р = 1.1 Вт (Фіг. 4). Залежність необхідної потужності рульового приводу від параметра R = (Сш+Cім )/I x w 2 при w = 13 х 2p показана на фіг. 4. Залежність необхідної потужності рульового приводу від частоти обертання ЛА в експлуатаційному діапазоні w при С ім = 0,04 Н х м/град показана на фіг. 5. Дані результа тів підтверджені експериментально. У зв'язку з тим, що на практиці частіше зустрічаються випадки, коли режими і параметри польоту ЛА змінюються по траєкторії, то досягти абсолютного резонансу (Сн – І х w2 = 0) важко. В таких випадках при реалізації даного способу виділяють найбільш важку, з енергетичної точки зору, ділянку польоту, а параметри С ш, І, та Сімм ви Сш + Сім = І х w2. при якому потрібна потужність приводу і джерела живлення досягають своїх мінімальних значень, як показано у "Ди намике следящи х приводов" , под ред д.т.н. Л. В.Рабиновича, М.: Ма шиностроение, 1982 г., стр. 26-32. Винахід (запропонований спосіб) може використовуватись як у системах керування літальних апаратів з електричними реверсивними рульовими приводами, так і з інши ми типами рульо 2 32455 бирають з умови ви конання на всій цій ділянці співвідношення: Cн I x w2 Систе ма управління, виконана згідно із способом, який пропонуєть ся, пройшла успішну апробацію при проведенні ДКР в ДержККБ "Луч". Використання цього способу на експериментальних зразках рульового приводу лі тального апарата дозволило зменши ти споживання струму, спрости ти конструкцію, зменшити її масу, підвищити надійність і точність літального апарата в цілому. =(0,5...1,6). В такому випадку досягається не повний резонанс, але також забезпечується суттєве зменшення потужності рульового приводу (фіг. 4). Фіг. 1 Фіг. 2 Фіг. 3 3 32455 Фіг. 4 Фіг. 5 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for aircraft control
Автори англійськоюSemenov Leonid Antonovych, Korosteliov Oleh Petrovych, Dotsenko Borys Ivanovych, Yakovenko Petro Oleksiiovych, Koroliov Anatolii Mykhailovych, Smishko Hryhorii Pavlovych, Bondarchuk Pavlo Stepanovych, Kosovenko Yevhen Viktorovych, Shepelev Yurii Ivanovych, Kuzmin Viacheslav Pavlovych
Назва патенту російськоюСпособ управления летательным аппаратом
Автори російськоюСеменов Леонид Антонович, Коростелев Олег Петрович, Доценко Борис Иванович, Яковенко Петр Алексеевич, Королев Анатолий Николаевич, Смишко Григорий Павлович, Бондарчук Павел Степанович, Косовенко Евгений Викторович, Шепелев Юрий Иванович, Кузьмин Вячеслав Павлович
МПК / Мітки
Мітки: апаратом, спосіб, літальним, управління
Код посилання
<a href="https://ua.patents.su/4-32455-sposib-upravlinnya-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління літальним апаратом</a>
Спосіб управління літальним апаратом
Номер патенту: 17957
Опубліковано: 17.06.1997
Автори: Ільясов Микола Халікович, Конюхов Станіслав Миколаєвич, Бушуєв Євген Іванович, Шабохін Віктор Олексійович
МПК: F41G 7/00
Мітки: спосіб, літальним, управління, апаратом
Формула / Реферат:
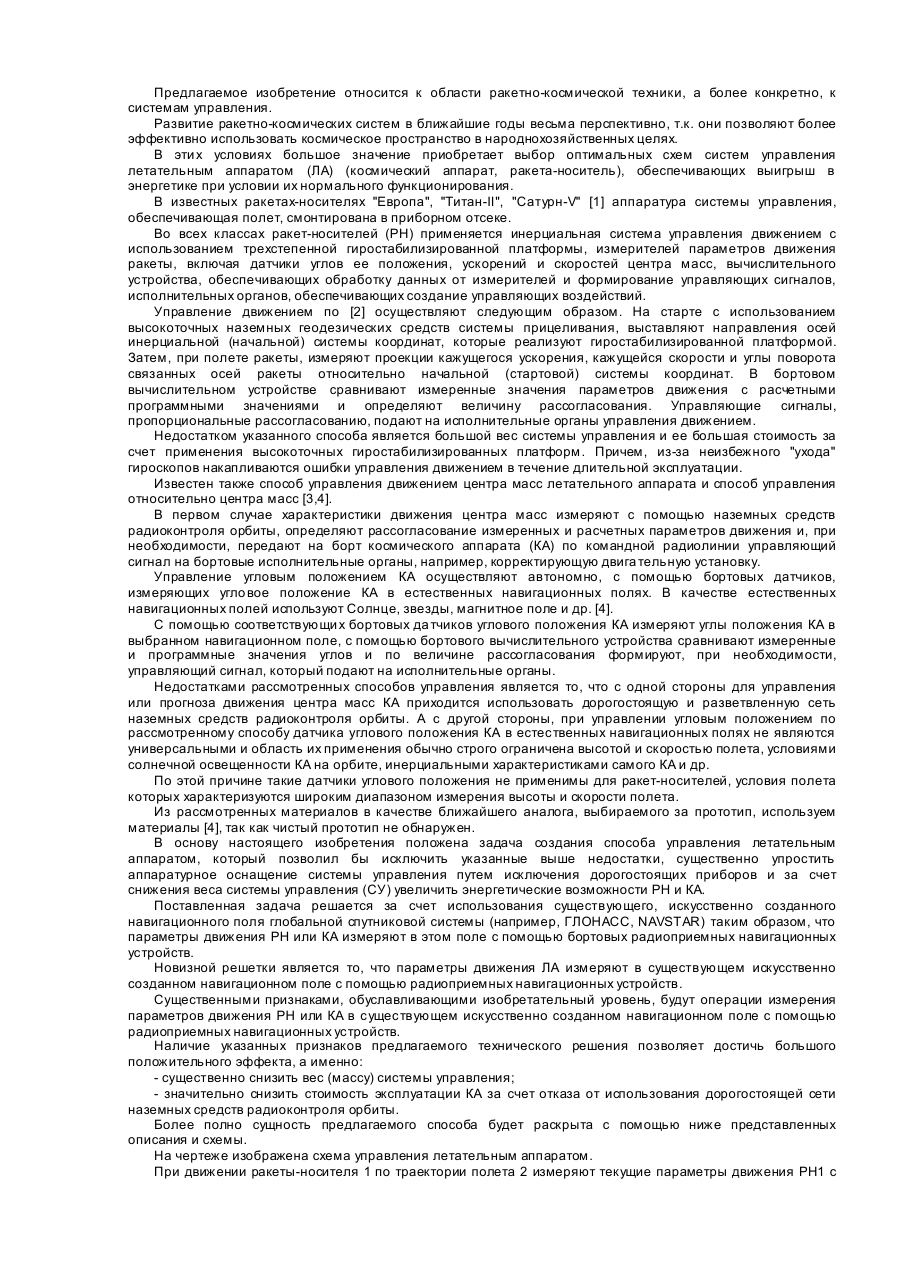
1. Способ управления летательным аппаратом, включающий операции по измерению текущих параметров движения, определению рассогласования измеренных параметров движения от программных и формированию управляющего сигнала пропорционально величине рассогласования, отличающийся тем, что параметры движения измеряют в существующем, искусственно созданном глобальной спутниковой системой навигационном поле, с помощью радиоприемных навигационных...
Система управління літальним апаратом
Номер патенту: 13078
Опубліковано: 28.02.1997
Автори: Конев Валерій Тимофійович, Абрамов Євген Ілліч, Орепер Володимир Якович
МПК: B64C 13/00
Мітки: система, апаратом, літальним, управління
Формула / Реферат:
(57) 1. Система управления летательным аппаратом, содержащая рычаг управления, электродистанционный канал управления, включающий вычислитель, сервопривод и датчик усилий, установленный между рычагом и проводкой управления, и механический канал управления, включающий проводку управления и резервную загрузочную пружину и привод руля, отличающаяся тем, что в ней параллельно рычагу управления к датчику усилий подсоединено пружинное устройство...
Літальний апарат і спосіб керування літальним апаратом
Номер патенту: 26662
Опубліковано: 12.11.1999
Автори: Вайт Ендрю Крофорд, Сайкон Джеймс Пітер, Розен Кеннет Мартін
МПК: B64C 29/00
Мітки: апаратом, апарат, спосіб, літальним, літальний, керування
Формула / Реферат:
1. Летательный аппарат, содержащий тороидальный фюзеляж, концентричный относительно оси, два вращающихся в противоположные стороны несущих винта, расположенных внутри канала винтов, определенного указанным тороидальным фюзеляжем для вращения вокруг оси вращения, которая совпадает с осью фюзеляжа, и средства для полного управления перемещением летательного аппарата по высоте, тангажу, крену и рысканью как при зависании, так и при движении...
Пристрій для управління цифровим телефонним апаратом
Номер патенту: 26883
Опубліковано: 29.12.1999
Автори: Молчанов Сергій Юрійович, Вовк Сергій Федорович, Бондаренко Валентин Іванович
МПК: H04M 1/72
Мітки: апаратом, цифровим, телефонним, пристрій, управління
Текст:
...входом якого з'єднано перший вихід БВВК, другий вихід якого з'єднано з третьою вихідною шиною управління, а третій вихід з'єднано з першим входом управління блока скремблірування, другий вхід управління якого з'єднано з другим виходом управління ФСПТТ, перший вихід управління якого з'єднано з третім входом управління БВВК і входом управління ФСНН. Також блок аналізу сигналів містить другу схему порівняння з другим блоком пам'яті коду...
Спосіб автоматичного управління плівковим випарним апаратом
Номер патенту: 27200
Опубліковано: 15.08.2000
Автори: ПРЯДКО Микола Олексійович, Ладанюк Анатолій Петрович, Чагаров Олександр Миколайович, Филоненко Віталій Миколайович
Мітки: автоматичного, плівковим, управління, апаратом, випарним, спосіб
Формула / Реферат:
Формула изобретенияСпособ автоматического управления пленочным выпарным аппаратом, предусматривающий регулирование уровня раствора -в надтрубном пространстве, отличающийся тем, что, с целью повышения производительности, определяют текущую и заданную производительность аппарата и в зависимости от их рассогласования регулируют подачу рециркуляционного раствора в аппарат с учетом уровня в надтрубном пространстве, при этом поддерживают...
Попередній патент: Поршнева машина
Наступний патент: Прискорювач плазми з замкненим дрейфом електронів
Випадковий патент: Дозатор мембранного типу для фасування в'язких, порошкоподібних та гранулоподібних продуктів