Підводний апарат з плавцевим рушієм
Номер патенту: 41724
Опубліковано: 17.09.2001
Автори: Майстер Валентин Іванович, Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Формула / Реферат
Підводний апарат з плавцевим рушієм, який містить крило, на поверхні якого є переміжні зубці та западини, який відрізняється тим, що в корпусі апарата та плавцевого рушія встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані з циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування відповідно з корпусу апарата та плавцевого рушія.
Текст
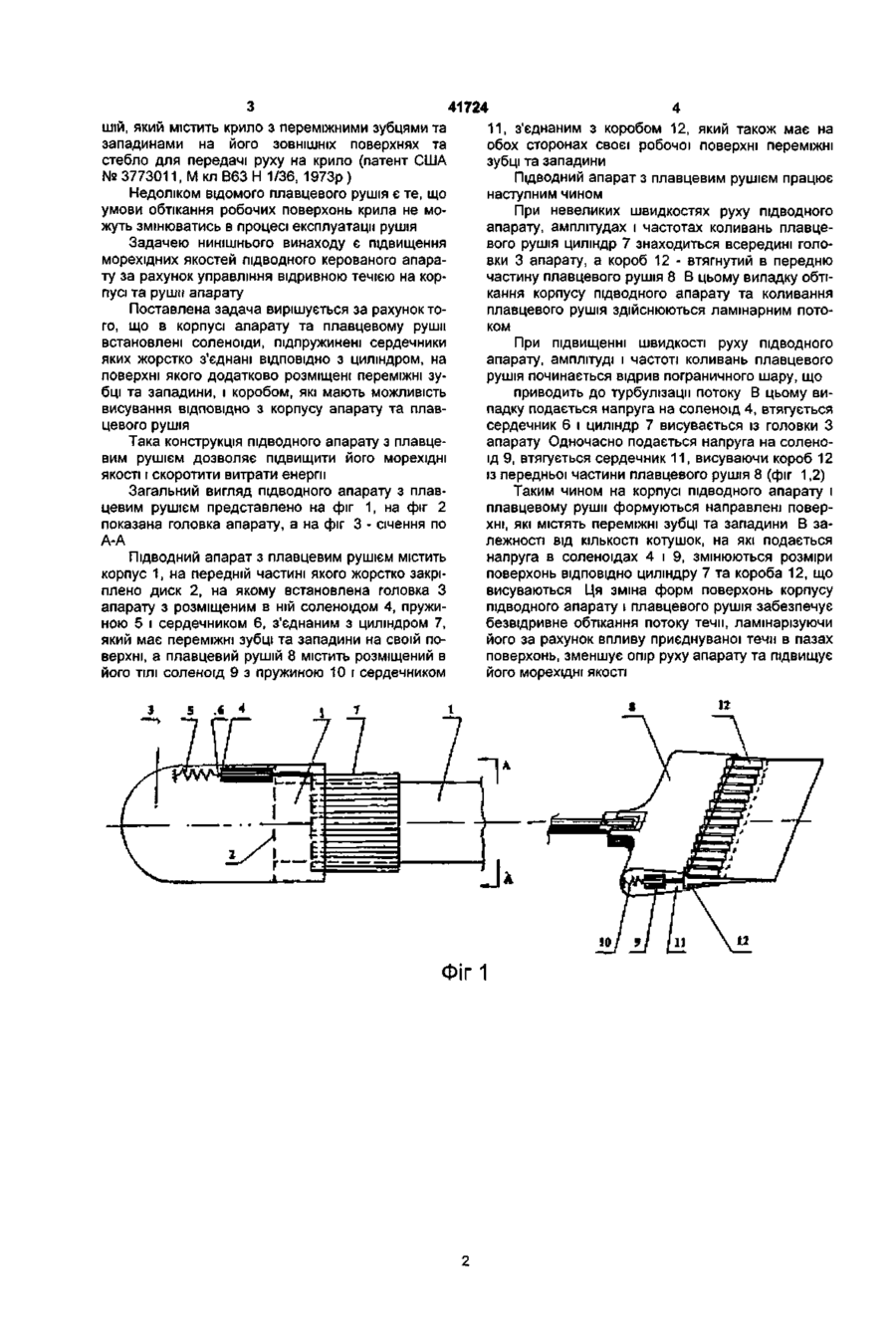
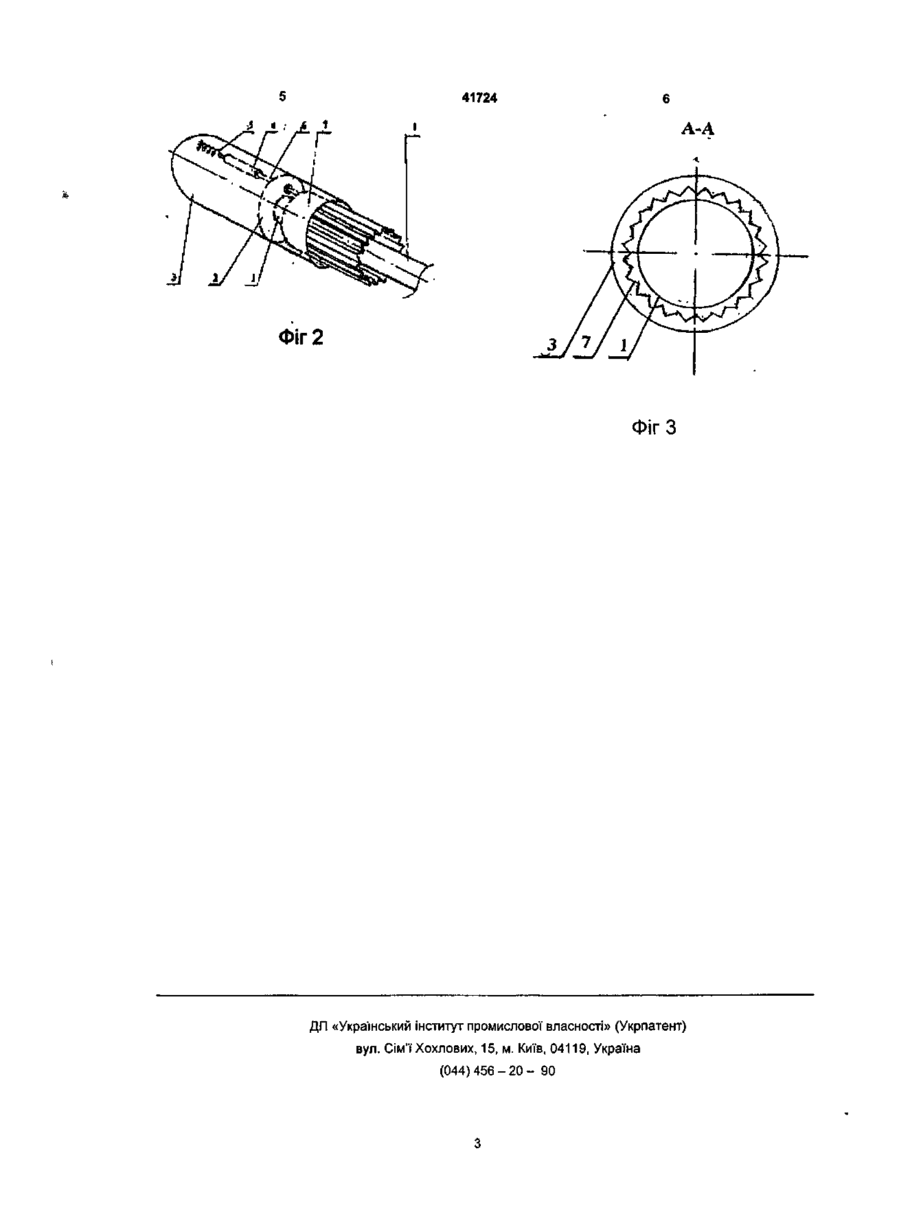
Підводний апарат з плавцевим рушієм, який містить крило, на поверхні якого є переміжні зубці Винахід відноситься до галузі суднобудування і може бути використаний при проектуванні та створенні підводних керованих апаратів багатоцільового призначення В техніці ВІДОМІ конструкції підводних керованих апаратів з плавцевими рушіями (М кл В63 Н 1/36, В63ВЗ/13) В аеромеханічних вимірюваннях параметрів потоку для одночасного вимірювання в ряді точок служать гребінки, які представляють собою обтічну стійку з встановленими на ній насадками, які розмішені на різній, відстані для підвищення точності вимірювань Одним із способів управління відривного течією є застосування вихрогенераторів для перемішування зовнішнього потоку з пограничним шаром Інший спосіб, заснований на застосуванні подовжніх пазів - виїмок V-образноі форми, дозволяє значно знижувати обтічний опір Скорочення розмірів зони відриву зчиняється за рахунок підкачування, обумовленого приєднанням течи в пазах В роботі Лін Д Ж К, Хауард Ф Г, Селбі Г В "Використання подовжніх пазів для управління відривним потоком, обтікаючим уступ" (Аэрокосмическая техника, 1990, №12 с 10-12) застосована ефективна система управління відривною течією, що дозволяє покращати характеристики крила та скоротити витрати енергії Експерименти проводились в аеродинамічній трубі січенням 508 х 711 мм при швидкості набігаючого потоку 40,2 м/с Товщина пограничного шару складала 33мм, а число Re « 9000 На плоскій похилій пло та западини, який відрізняється тим, що в корпусі апарата та плавцевого рушія встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані з циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування ВІДПОВІДНО З корпусу апарата та плавцевого рушія з кутом похилу 25° досліджувались подовжні короткі, довгі та синусоїдальні пази (VK = 12290куб мм ,\/д = 24581 куб мм, Vc = 42606куб мм) Довгі пази мали виїмки глибиною 1,3 мм Результати експерименту показали, що короткі пази, які починаються перед верхньою межею криволінійної частини уступу і розміщені на відстані 1,5 товщини пограничного шару, скорочують протяжність області повторного приєднання потоку більш ніж на 60% Одним із недоліків описаної вище моделі є неможливість автоматичного керування введенням в дію пазів тієї чи іншої довжини при ЗМІНІ умов обтікання поверхні крила Загальний напрям досліджень з теорії пластинок та оболонок обмірковується в роботі І Ф Образцова "Розвиток теорії пластин і оболонок при створенні конструкцій сучасних літальних апаратів" (Теория и практика проектирования пассажирских самолетов М , Наука, 1976, с 61-73 ) ТОНКОСТІННІ стрижні з урахуванням депланаци поперечного січення в якості моделей для ронів, підкріплені пластинки - для обшивки, оболонки різного окреслення - для крила в цілому розглядаються в роботі В 3 Власова "ТОНКОСТІННІ пружні стрижні" (М , Госстройиздат, 1940, 275с ) Багатошарові оболонки для елементів, складених із композиційних матеріалів з різним характером армірування представлені в роботі І Ф Образцова "Оптимальне армірування оболонок обертання із композиційних матеріалів" (М , Машиностроение, 1977, 144с) Найбільш близьким за технічною суттю до досягненого технічного результату є плавцевий ру CM ГУ 41724 шій, який містить крило з переміжними зубцями та западинами на його ЗОВНІШНІХ поверхнях та стебло для передачі руху на крило (патент США № 3773011, М кл В63 Н 1/36, 1973р ) Недоліком відомого плавцевого рушія є те, що умови обтікання робочих поверхонь крила не можуть змінюватись в процесі експлуатації рушія Задачею нинішнього винаходу є підвищення морехідних якостей підводного керованого апарату за рахунок управління відривною течією на корпусі та руши апарату Поставлена задача вирішується за рахунок того, що в корпусі апарату та плавцевому руши встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані ВІДПОВІДНО З циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування відповідно з корпусу апарату та плавцевого рушія Така конструкція підводного апарату з плавцевим рушієм дозволяє підвищити його морехідні якості і скоротити витрати енергії Загальний вигляд підводного апарату з плавцевим рушієм представлено на фіг 1, на фіг 2 показана головка апарату, а на фіг 3 - січення по А-А Підводний апарат з плавцевим рушієм містить корпус 1, на передній частині якого жорстко закріплено диск 2, на якому встановлена головка З апарату з розміщеним в ній соленоїдом 4, пружиною 5 і сердечником 6, з'єднаним з циліндром 7, який має переміжні зубці та западини на своїй поверхні, а плавцевий рушій 8 містить розміщений в його ТІЛІ соленоїд 9 з пружиною 10 і сердечником 11, з'єднаним з коробом 12, який також має на обох сторонах своєї робочої поверхні переміжні зубці та западини Підводний апарат з плавцевим рушієм працює наступним чином При невеликих швидкостях руху підводного апарату, амплітудах і частотах коливань плавцевого рушія циліндр 7 знаходиться всередині головки 3 апарату, а короб 12 - втягнутий в передню частину плавцевого рушія 8 В цьому випадку обтікання корпусу підводного апарату та коливання плавцевого рушія здійснюються ламінарним потоком При підвищенні швидкості руху підводного апарату, амплітуді і частоті коливань плавцевого рушія починається відрив пограничного шару, що приводить до турбулізації потоку В цьому випадку подається напруга на соленоїд 4, втягується сердечник 6 і циліндр 7 висувається із головки З апарату Одночасно подається напруга на соленоїд 9, втягується сердечник 11, висуваючи короб 12 із передньої частини плавцевого рушія 8 (фіг 1,2) Таким чином на корпусі підводного апарату і плавцевому руши формуються направлені поверхні, які містять переміжні зубці та западини В залежності від КІЛЬКОСТІ котушок, на які подається напруга в соленоїдах 4 і 9, змінюються розміри поверхонь ВІДПОВІДНО циліндру 7 та короба 12, що висуваються Ця зміна форм поверхонь корпусу підводного апарату і плавцевого рушія забезпечує безвідривне обтікання потоку течи, ламінарізуючи його за рахунок впливу приєднуваної течи в пазах поверхонь, зменшує опір руху апарату та підвищує його морехідні якості ФІГ 1 41724 А-А Фіг 2 Фіг З ДП «Український інститут промислової власності» (Укрпатент) вул. Сім'ї Хохлових, 15, м. Київ, 04119, Україна (044)456-20- 90
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliiovych
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич
МПК / Мітки
Мітки: апарат, рушієм, підводний, плавцевим
Код посилання
<a href="https://ua.patents.su/4-41724-pidvodnijj-aparat-z-plavcevim-rushiehm.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат з плавцевим рушієм</a>
Апарат з плавцевим рушієм
Номер патенту: 25799
Опубліковано: 30.10.1998
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
МПК: B63H 1/36
Мітки: плавцевим, рушієм, апарат
Формула / Реферат:
Аппарат с плавниковым движителем, содержащий корпус с плавниковым движителем, отличающийся тем, что последний содержит цилиндр, размещенный в его кормовой части и соединенный посредством осей с шайбами, жестко закрепленными на торцевых поверхностях движителя, и касающийся своей боковой поверхностью валика, установленного в прорези кормовой части плавника, на одной оси с которым находится ролик, связанный передачей с роликом электродвигателя...
Підводний маніпулятор

Номер патенту: 706
Опубліковано: 15.02.2001
Автори: Пуриш Валентин Захарович, Корольова Галина Валентинівна, Корольов Сергій Михайлович
МПК: B25J 3/00
Мітки: підводний, маніпулятор
Формула / Реферат:
Підводний .маніпулятор, що містить опорний каркас із шарнірних елементів, покритий оболонкою, який відрізняється тим, що шарнірні елементи обладані слідкуючими гідроприводами з мікропроцесорним управлінням, оболонка виконана у вигляді м'якого гідроскафандра, крім того маніпулятор обладнано навішаною портативною пневмо-гідростанцією, центральним комп'ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по...
Підводний планер

Номер патенту: 28282
Опубліковано: 16.10.2000
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
МПК: B63B 3/13
Формула / Реферат:
Подводный планер, содержащий корпус аппарата и крылья, отличающийся тем, что последние имеют в своем теле бобины с гибким пленочным материалом, представляющим собой дополнительные поверхности крыльев, закрепленных на общем фигурным рычаге, проходящем через прорези, расположенные с боковых поверхностей корпуса планера перпендикулярно его продольной оси, и имеющем пальцы, входящие в отверстия направляющих и соединенные с бобышками, которые...
Підводний буксирований апаратурний носій

Номер патенту: 14168
Опубліковано: 25.04.1997
Автори: Сафонов Георгій Олександрович, Іваненко Михайло Іванович, Старков Костянтин Олександрович, Блінков Віктор Олександрович, Ком'ягін Юрій Васильович, Гайскій Віталій Олександрович
МПК: B63B 21/56
Мітки: носій, буксирований, апаратурний, підводний
Формула / Реферат:
1. Подводный буксируемый аппаратурный носитель, содержащий корпус с хвостовым оперением, выполненный в виде центрального и боковых цилиндров, жестко соединенных между собой при помощи основания обтекаемого профиля, на котором установлен кронштейн для крепления грузонесущего кабеля; выполненный в виде двух параллельных планок с отверстиями, при этом на внешней боковой поверхности каждого бокового цилиндра установлена пластина, на которой...
Тепломасообмінний апарат

Номер патенту: 32340
Опубліковано: 15.12.2000
Автори: Гурець Лариса Леонідівна, Пляцук Леонід Дмитрович
МПК: B01J 19/32, B01D 53/14
Мітки: апарат, тепломасообмінний
Текст:
...що , зменшує ефективність масопереносу. Найбільш близьким до запропонованого по технічній суті та дося гаемому ефекту і прийнятим за прототип є тепломасообміннии апарат , який містить вертикальний корпус, штуцери входу та виходу гага і рідини, газорозподільчу решітку та решітку кріплення стрижні з , виконаними на певній відстані один від одного сферичними потовщен нями, які з'єднані з насадочними тілами шарнірно з можливостю коливального...
Попередній патент: Спосіб лікування дерматозів з порушенням кератинізації
Наступний патент: Спосіб кількісного визначення об’єму навколоплідних вод у вагітних
Випадковий патент: Пристрій локалізації і гасіння полум'я