Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії
Номер патенту: 66719
Опубліковано: 10.01.2012
Автори: Куцак Антон Олександрович, Панченко Олександр Васильович, Коваленко Тетяна Іванівна, Джаназян Володимир Ванікович
Формула / Реферат
1. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, що містить прив'язний підводний апарат, кабель-трос, судно-носій, підйомно-спускний пристрій, пост енергетики й управління прив'язним підводним апаратом, яка відрізняється тим, що вона додатково містить автономний радіокерований катер з двигуном-генератором, до якого прив'язний підводний апарат.
2. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, яка відрізняється тим, що автономний радіокерований катер має змінну регульовану плавучість та пристрій зміни плавучості.
3. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, яка відрізняється тим, що при моніторингу акваторії як точку відліку використовують дно водойми.
Текст
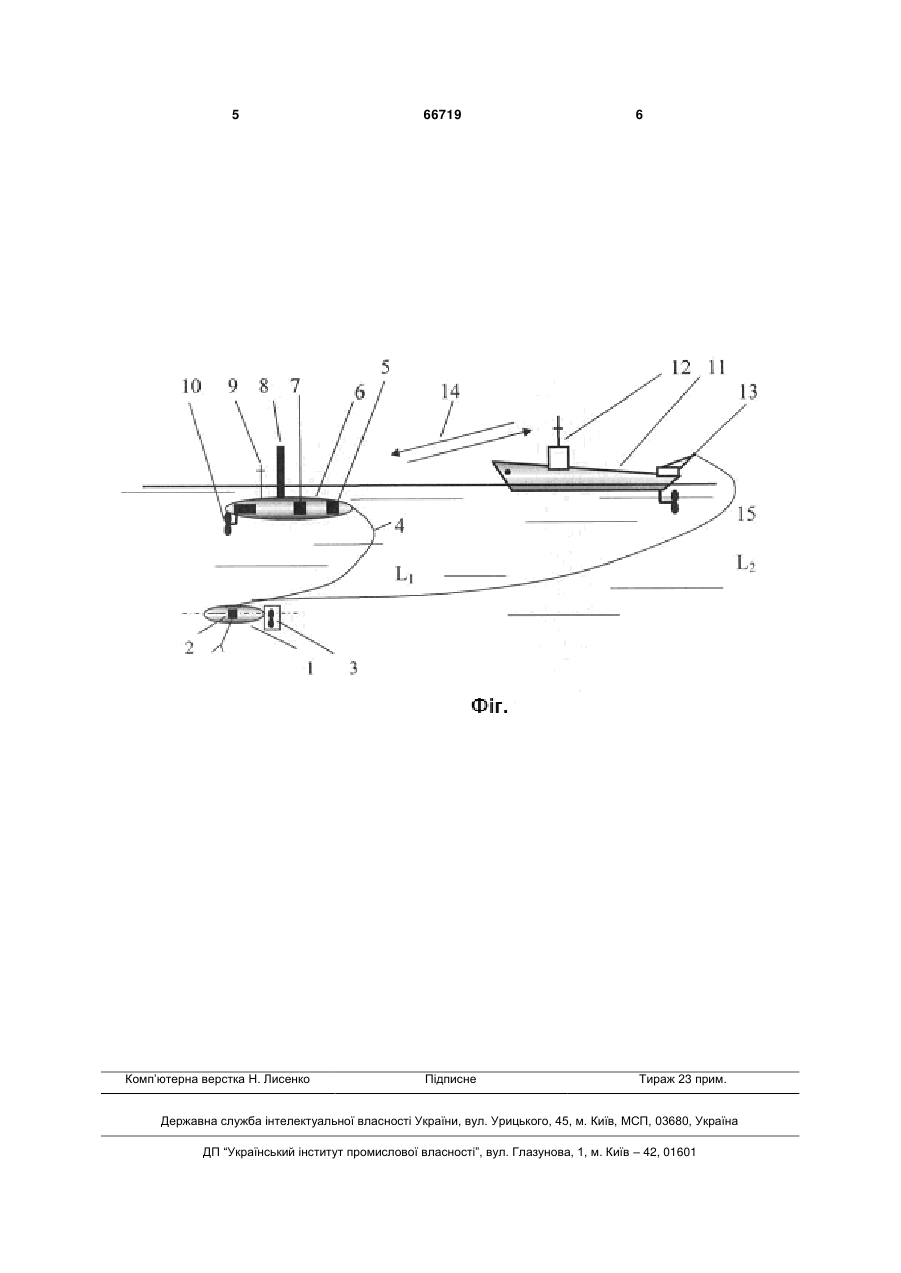
1. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, що містить прив'язний підводний апарат, кабельтрос, судно-носій, підйомно-спускний пристрій, 3 лад системи ЕХ 116 (МИВ), США БЗА. АКМ8,1Л8А, США) В основу корисної моделі поставлено задачу шляхом усунення недоліків прототипу забезпечити збільшення дистанції між кораблем-носієм і прив'язаним підводним апаратом, значне зменшення енергозатрат при експлуатації прив'язного підводного апарату, усунення впливу хвилювання водної поверхні на систему "кабель-трос прив'язаний підводний апарат" і, як наслідок, підвищення якості моніторингу акваторії. Суть корисної моделі в автономній універсальній підводній системі підвищеної живучості для моніторингу акваторії, що містить прив'язний підводний апарат, кабель-трос, корабель-носій, пост енергетики й управління прив'язаним підводним апаратом полягає в тому, що вона додатково містить автономний радіокерований катер до якого прив'язаний підводний апарат. Суть корисної моделі полягає і в тому, що автономний радіокерований катер має змінну регульовану плавучість. Суть корисної моделі полягає також і в тому, що при моніторингу акваторії в якості точки відліку використовує для водойми. Порівняльний аналіз технічного рішення з прототипом дозволяє зробити висновок, що автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, яка заявляється, відрізняється тим, що вона додатково містить проміжний автономний радіокерований катер до якого прив'язаний підводний апарат, який має змінну регульовану плавучість, а при моніторингу акваторії в якості точки відліку використовує дно водойми. Таким чином, автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, яка заявляється, відповідає критерію корисної моделі "новизна". Суть корисної моделі пояснюється за допомогою ілюстрації, де на Фіг.показана конструктивнокомпонувальна схема підводної автономної універсальної підводної системи підвищеної живучості для моніторингу акваторії. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії, яка заявляється містить (як варіант конструктивного виконання - див. схему на Фіг.) прив'язний підводний апарат 1, система керування прив'язного підводного апарату з ехолокатором і маніпулятором 2, маршовий рушійний комплекс прив'язного підводного апарату 3, кабель-трос 4, автоматичну в'юшку для кабель-тросу 5, яка встановлена на автономному радіокерованому катері зі змінною плавучістю 6, систему керування автономним радіокерованим катером зі змінною плавучістю 7, пристрій для роботи двигуна автономного радіокерованого катеру зі змінною плавучістю під водою 8, бензиновий двигунгенератор радіокерованого катера зі змінною плавучістю 10, судно-носій 11. На судні-носії знаходиться пост управління на автономним радіокерованим катером і прив'язним підводним апаратом 12, підйомно-спускний пристрій для 66719 4 підйому і спуску прив'язного підводного апарату і автономно радіокерованого катера 13. Керування автономним радіокерованим катером 6 і прив'язним підводним апаратом 1 відбувається за допомогою радіосигналів сигналів керування 14 якими здійснюють обмін судно-носій і прив'язний підводний апарат. Крім того на Фіг. показано траєкторію кабель-троса 15 в разі з'єднання прив'язного підводного апарата кабель-тросом безпосередньо з судном носієм. Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії застосовується наступним чином (див. Фіг.). В разі необхідності моніторингу акваторії з судна-носія 11 за допомогою підйомно-спускового пристрою 13 спускають на водну поверхню прив'язний підводний апарат 1 і автономний радіокерований катер зі змінною плавучістю 6. Прив'язний підводний апарат 1 і автономний радіокерований катер зі змінною плавучістю 6 з'єднані за допомогою кабель-тросу 4. По радіосигналу 14 надісланому з корабля-носія 11 і прийнятому радіостанцією 9, автономний радіокерований катер 5 починає відповідний рух за допомогою бензинового двигуна-генератора 10. Одночасно двигун-генератор подає електричне живлення на прив'язний підводний апарат 1. Автономний радіокерований катер 6 займає відповідне положення відносно поверхні води завдяки пристрою для роботи двигуна-генератора радіокерованого катеру зі змінною плавучістю під водою 8. Це положення залежить від погодних умов, хвилювання водної поверхні і поставленої програми моніторингу акваторії. Одночасно прив'язаний підводний апарат 1 за допомогою системи керування прив'язного підводного апарату з ехолокатором 2, маршового рушійного комплексу 3, кабель-тросу 4 починає виконувати свою програму дослідження занурюючись під поверхню води. Зв'язок і енергопостачання між прив'язним підводним апаратом 1 і автономним радіокерованим катером 6 здійснюється за допомогою кабель-тросу довжина якого регулюються автоматичною в'юшкою для кабелю 5. Під час моніторингу акваторії в якості точки відліку використовується дно водойми за допомогою ехолота встановленому на підводному апараті. Підвищення ефективності застосування автономної універсальної підводної системи моніторингу акваторії підвищеної живучості, яка заявляється, у порівнянні з прототипом, досягається за рахунок того, що як носій використовується автономний радіокерований катер до якого прив'язний підводний апарат, який має змінну регульовану плавучість, а при моніторингу акваторії в якості точки відліку використовується дно водойми. Джерела інформації: 1. Блинцов B.C. Привязные подводные системы. К.: Наукова думка, 1998.-231с.-аналог. 2. Патент України №42115 від 15.10.2001р. МПК 7 F41A27/06, - прототип 5 Комп’ютерна верстка Н. Лисенко 66719 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous universal underwater system of increased survivability for monitoring water area
Автори англійськоюKutsak Anton Oleksandrovych, Kovalenko Tetiana Ivanivna, Dzhanazian Volodymyr Vanikovych, Panchenko Oleksandr Vasyliovych
Назва патенту російськоюАвтономная универсальная подводная система повышенной живучести для мониторинга акватории
Автори російськоюКуцак Антон Александрович, Коваленко Татьяна Ивановна, Джаназян Владимир Ваникович, Панченко Александр Васильевич
МПК / Мітки
МПК: B63C 9/00, B63C 11/00
Мітки: підвищеної, живучості, акваторії, система, автономна, універсальна, моніторингу, підводна
Код посилання
<a href="https://ua.patents.su/3-66719-avtonomna-universalna-pidvodna-sistema-pidvishheno-zhivuchosti-dlya-monitoringu-akvatori.html" target="_blank" rel="follow" title="База патентів України">Автономна універсальна підводна система підвищеної живучості для моніторингу акваторії</a>
Автономна вітроелектрогенеруюча система
Номер патенту: 26494
Опубліковано: 25.09.2007
Автори: Стрункін Гліб Миколайович, Алексієвський Дмитро Геннадійович, Омельчук Наталія Анатоліївна, Буров Олексій Миколайович, Веселов Костянтин Ігорович, Таранець Андрій Вікторович, Переверзев Анатолій Васильович, Семенов Всеволод Всеволодович
МПК: H02K 17/34
Мітки: вітроелектрогенеруюча, система, автономна
Формула / Реферат:
Автономна вітроелектрогенеруюча система на основі асинхронного вентильного каскаду, складеного із асинхронного генератора з фазним ротором і роторного та статорного перетворювачів, яка відрізняється тим, що роторний перетворювач містить некерований випрямляч, навантаженням якого є імпульсний перетворювач постійного струму, а як статорний перетворювач містить автономний інвертор напруги.
Автономна система опалення
Номер патенту: 65253
Опубліковано: 25.11.2011
Автори: Борщевич Олег Сергійович, Леонов Володимир Петрович, Грек В'ячеслав Віленович, Борщевич Лариса Вікторівна
МПК: F24D 13/00
Мітки: опалення, автономна, система
Формула / Реферат:
1. Автономна система опалення, що включає рідинні електронагрівачі та блок управління системою, яка відрізняється тим що як рідинні електронагрівачі використовують паралельно включені електродні водонагрівачі, з'єднані через запірні вентилі з трубопроводом подачі та відводу теплоносія, на вході якого розташовані система фільтрації, циркуляційні насоси та компенсаційний бак для регулювання тиску теплоносія, а на виході розташоване інжекційне...
Автономна система освітлення на основі сонячної батареї та світлодіодних джерел світла
Номер патенту: 34094
Опубліковано: 25.07.2008
Автори: Романова Тетяна Іванівна, Носанов Микола Ілліч, Носанов Максим Миколайович
МПК: F21L 4/00
Мітки: світлодіодних, освітлення, батареї, автономна, джерел, сонячної, світла, основі, система
Формула / Реферат:
Автономна система освітлення на основі сонячної батареї та світлодіодних джерел світла, що включає сонячну батарею, запираючий діод, автономний акумулятор, буферну ємність, фотоелемент і лампу, яка відрізняється тим, що лампа виконана з n-ї кількості модулів, на поверхні яких рівномірно розташовані і послідовно з'єднані світлодіоди, а модулі з'єднані між собою паралельно і живляться від акумулятора, який з'єднаний з фотоелементом, буферною...
Автономна система водяного опалення будівель
Номер патенту: 30492
Опубліковано: 15.11.2000
Автори: Процишин Борис Миколайович, Писарєв В'ячеслав Євгенович, Наумов Сергій Євгенович
МПК: F24D 10/00
Мітки: автономна, будівель, система, опалення, водяного
Формула / Реферат:
Автономна система водяного опалення будівель, яка включає паливний котел з димоходом, розширювальний бак, нагрівальні прилади, загальні подаючу та зворотну лінії, відрізняється тим, що додатково містить абсорбційний тепловий насос, який складається із з'єднаних між собою трубопроводами генератора, випарника, абсорбера, конденсатора, теплообмінника розчинів, насосів та байпасний димохід, при цьому генератор та випарник розташовані послідовно у...
Автономна система каналізації
Номер патенту: 6930
Опубліковано: 16.05.2005
Автори: Краснов Андрій Сергійович, Загольський Віктор Миколайович
МПК: E03F 1/00
Мітки: система, каналізації, автономна
Формула / Реферат:
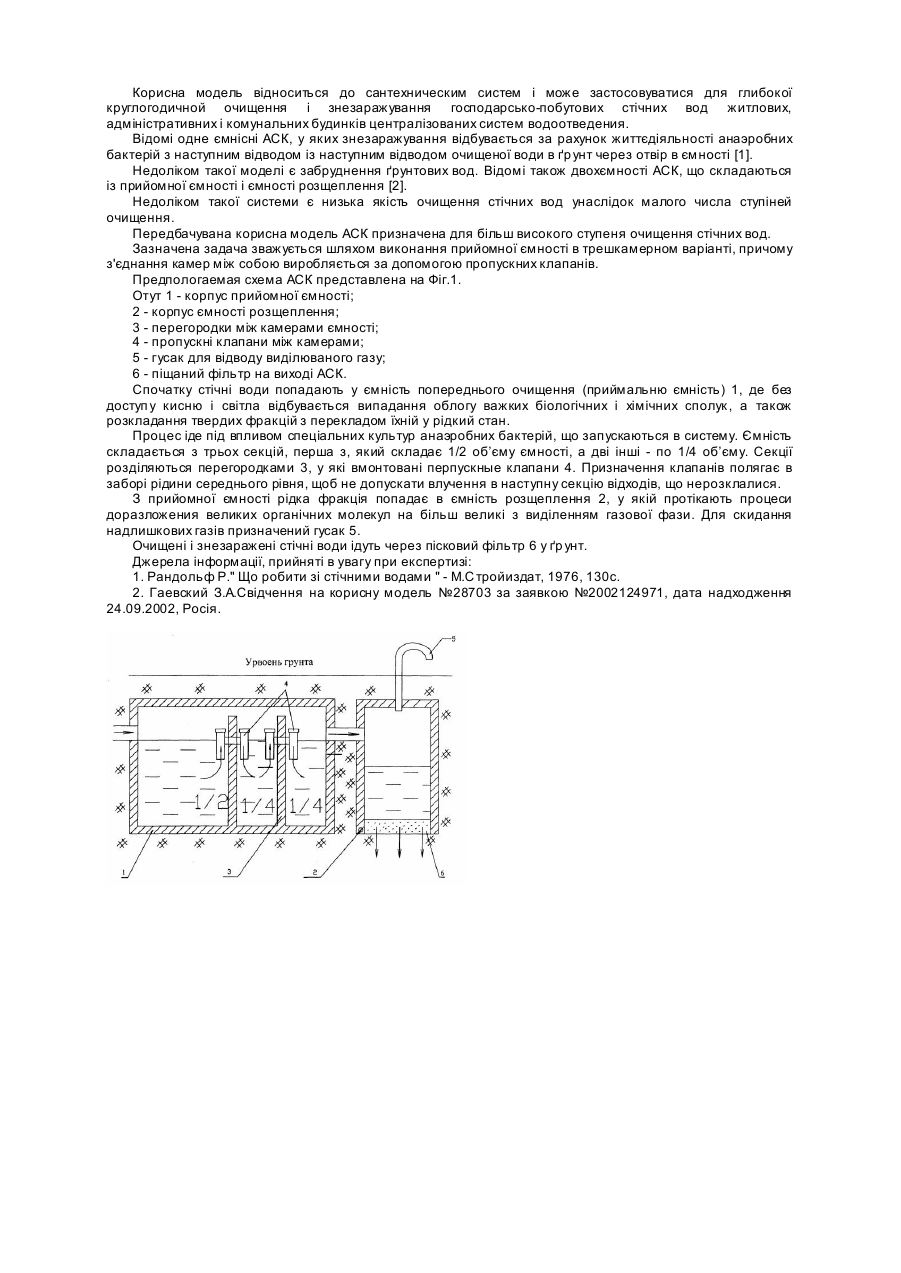
1. Автономна система каналізації, що містить ємність попереднього очищення і ємність розщеплення, культуру анаеробних бактерій, що додається в стічні води, і фільтруючий елемент, яка відрізняється тим, що приймальна ємність має трикамерне виконання.2. Автономна система каналізації за п. 1., яка відрізняється тим, що послідовне надходження рідини, що очищається, з камери в камеру здійснюється за допомогою пропускних клапанів.
Попередній патент: Тренажер
Наступний патент: Спосіб газифікації водовугільної суміші в обертовій печі для отримання диметилового ефіру
Випадковий патент: Спосіб диференційної серодіагностики туберкульозу у великої рогатої худоби