Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70226
Опубліковано: 15.09.2004
Автори: Островерхов Микола Якович, Кострицький Валерій Всеволодович, Кириченко Юрій Олексійович, Теряєв Віталій Іванович
Формула / Реферат
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, яка обертається за допомогою електроприводу, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, вихід якого зв'язаний з виходом блока логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулона, вихід якого зв'язано з входом блока логарифмування сигналу датчика кутової швидкості рулона, виходи блока логарифмування сигналу датчика лінійної швидкості матеріалу та блока логарифмування сигналу датчика кутової швидкості рулона, зв'язані з входами блока віднімання, вихід якого зв'язаний з входом блока додавання, інший вхід якого зв'язаний із виходом задатчика натягу, а вихід зв'язано з входом блока антилогарифмування, датчик кутової швидкості рулона зв'язаний з електродвигуном, який відрізняється тим, що містить додатковий блок антилогарифмування, блок обчислення моменту збурення, блок компенсації похибки, суматор, причому вхід додаткового блока антилогарифмування зв'язаний з виходом блока віднімання, а вихід - із входом блока обчислення моменту збурення, вихід якого зв'язано із входом блока компенсації похибки, вихід якого та вихід блока антилогарифмування зв'язані із входами суматора, вихід якого зв'язаний із входом системи керування електроприводу.
Текст
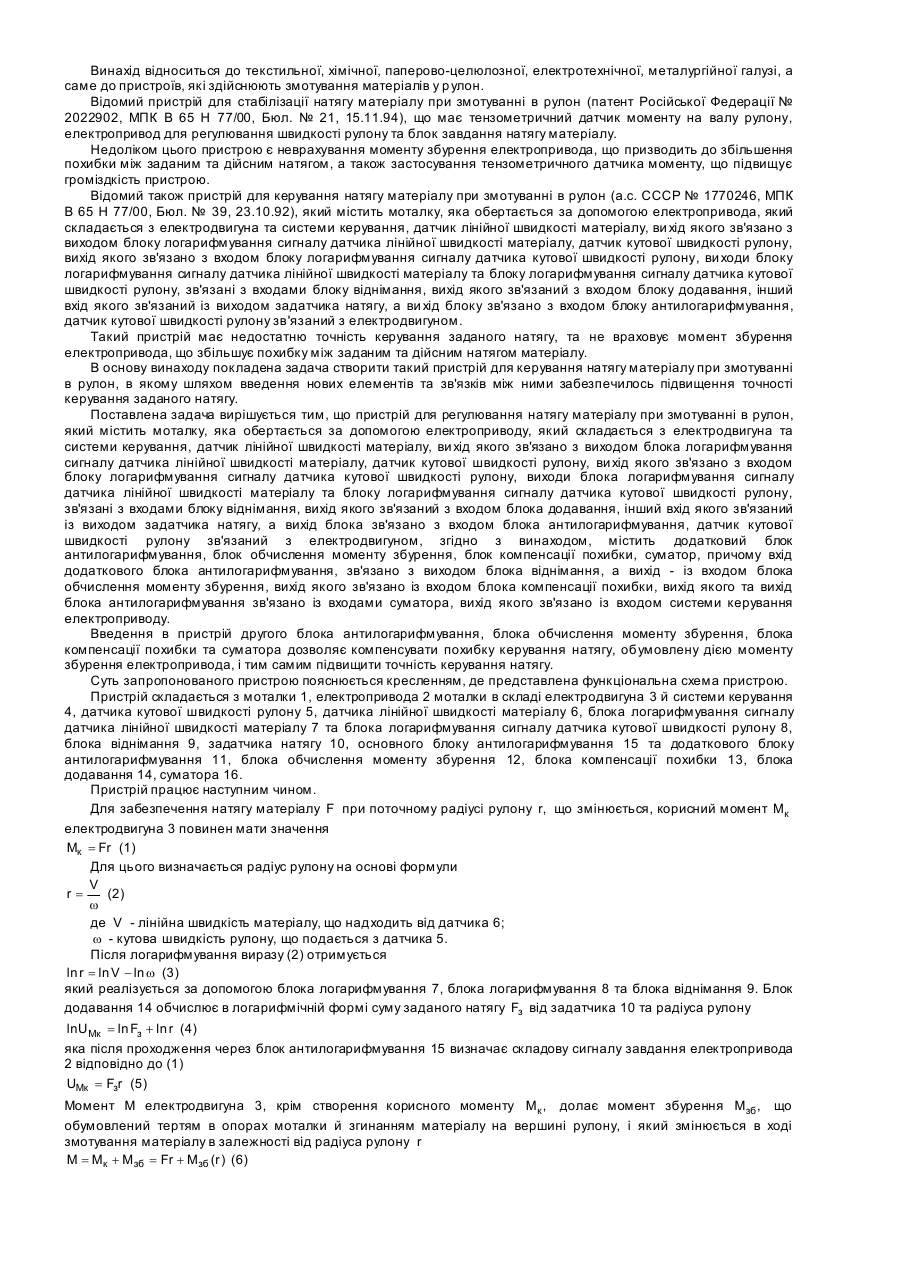
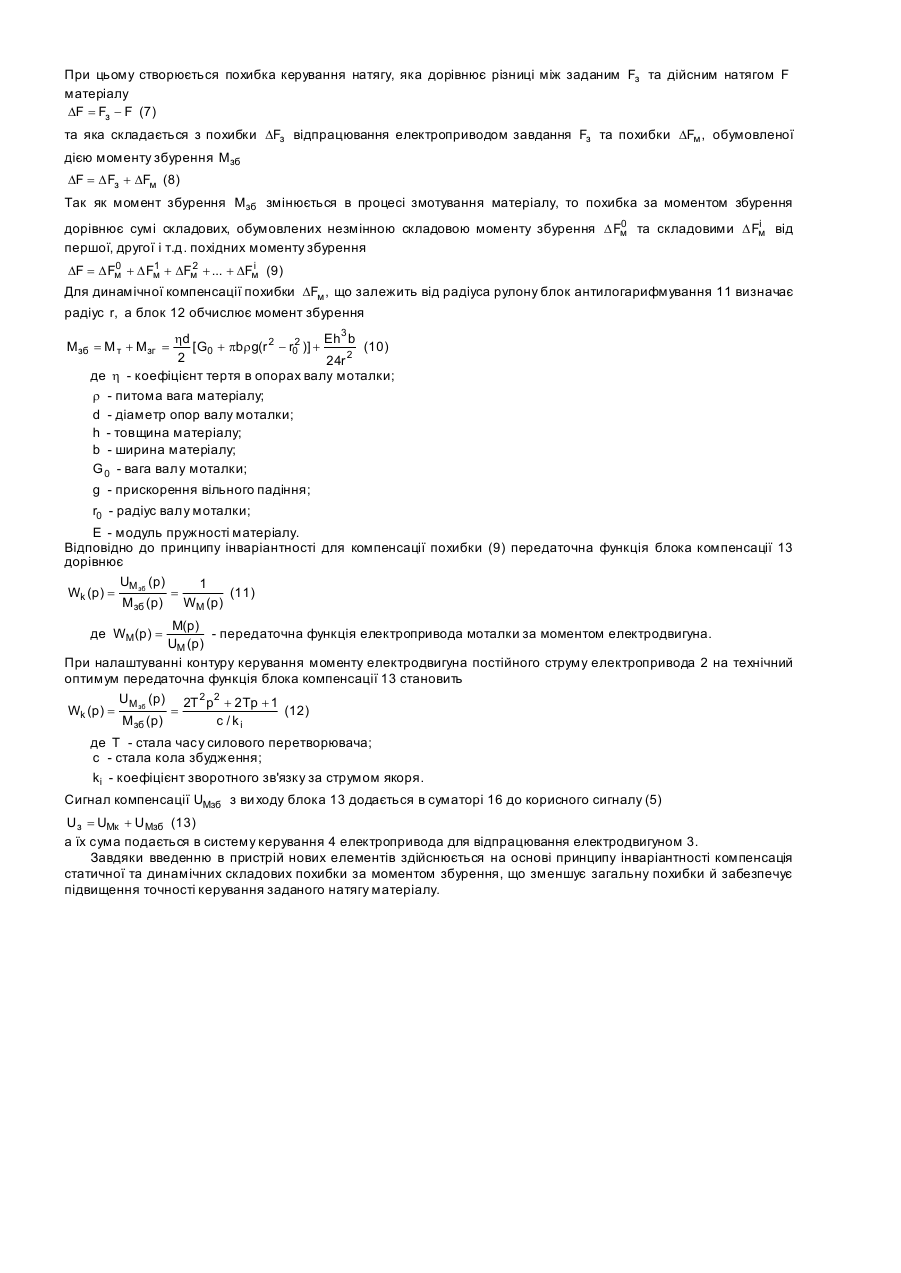
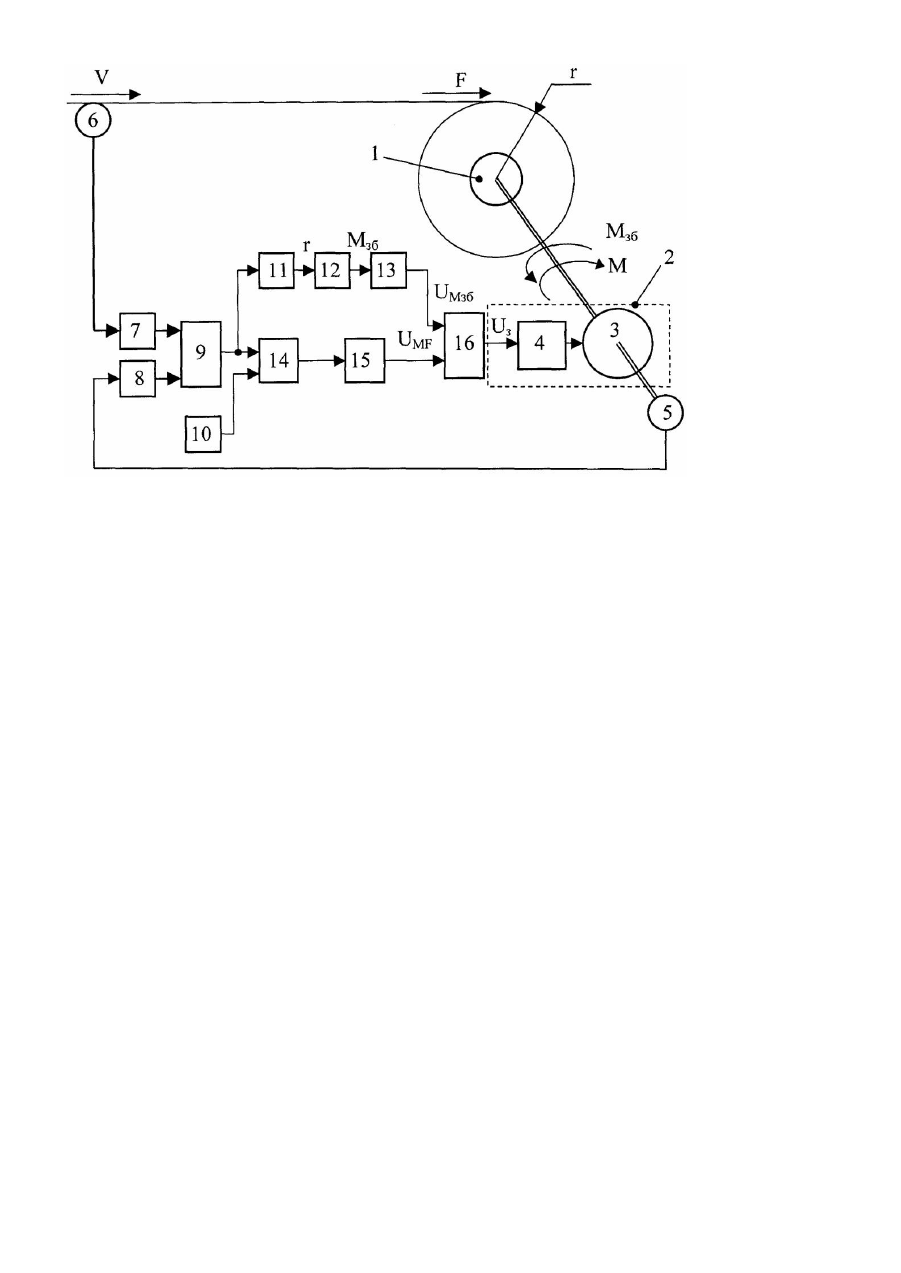
Винахід відноситься до текстильної, хімічної, паперово-целюлозної, електротехнічної, металургійної галузі, а саме до пристроїв, які здійснюють змотування матеріалів у р улон. Відомий пристрій для стабілізації натягу матеріалу при змотуванні в рулон (патент Російської Федерації № 2022902, МПК В 65 Н 77/00, Бюл. № 21, 15.11.94), що має тензометричний датчик моменту на валу рулону, електропривод для регулювання швидкості рулону та блок завдання натягу матеріалу. Недоліком цього пристрою є неврахування моменту збурення електропривода, що призводить до збільшення похибки між заданим та дійсним натягом, а також застосування тензометричного датчика моменту, що підвищує громіздкість пристрою. Відомий також пристрій для керування натягу матеріалу при змотуванні в рулон (а.с. СССР № 1770246, МПК В 65 Н 77/00, Бюл. № 39, 23.10.92), який містить моталку, яка обертається за допомогою електропривода, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, ви хід якого зв'язано з виходом блоку логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулону, вихід якого зв'язано з входом блоку логарифмування сигналу датчика кутової швидкості рулону, ви ходи блоку логарифмування сигналу датчика лінійної швидкості матеріалу та блоку логарифмування сигналу датчика кутової швидкості рулону, зв'язані з входами блоку віднімання, вихід якого зв'язаний з входом блоку додавання, інший вхід якого зв'язаний із виходом задатчика натягу, а ви хід блоку зв'язано з входом блоку антилогарифмування, датчик кутової швидкості рулону зв'язаний з електродвигуном. Такий пристрій має недостатню точність керування заданого натягу, та не враховує момент збурення електропривода, що збільшує похибку між заданим та дійсним натягом матеріалу. В основу винаходу покладена задача створити такий пристрій для керування натягу матеріалу при змотуванні в рулон, в якому шляхом введення нових елементів та зв'язків між ними забезпечилось підвищення точності керування заданого натягу. Поставлена задача вирішується тим, що пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, яка обертається за допомогою електроприводу, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, ви хід якого зв'язано з виходом блока логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулону, ви хід якого зв'язано з входом блоку логарифмування сигналу датчика кутової швидкості рулону, виходи блока логарифмування сигналу датчика лінійної швидкості матеріалу та блоку логарифмування сигналу датчика кутової швидкості рулону, зв'язані з входами блоку віднімання, вихід якого зв'язаний з входом блока додавання, інший вхід якого зв'язаний із виходом задатчика натягу, а вихід блока зв'язано з входом блока антилогарифмування, датчик кутової швидкості рулону зв'язаний з електродвигуном, згідно з винаходом, містить додатковий блок антилогарифмування, блок обчислення моменту збурення, блок компенсації похибки, суматор, причому вхід додаткового блока антилогарифмування, зв'язано з виходом блока віднімання, а вихід - із входом блока обчислення моменту збурення, вихід якого зв'язано із входом блока компенсації похибки, вихід якого та вихід блока антилогарифмування зв'язано із входами суматора, вихід якого зв'язано із входом системи керування електроприводу. Введення в пристрій другого блока антилогарифмування, блока обчислення моменту збурення, блока компенсації похибки та суматора дозволяє компенсувати похибку керування натягу, обумовлену дією моменту збурення електропривода, і тим самим підвищити точність керування натягу. Суть запропонованого пристрою пояснюється кресленням, де представлена функціональна схема пристрою. Пристрій складається з моталки 1, електропривода 2 моталки в складі електродвигуна 3 й системи керування 4, датчика кутової швидкості рулону 5, датчика лінійної швидкості матеріалу 6, блока логарифмування сигналу датчика лінійної швидкості матеріалу 7 та блока логарифмування сигналу датчика кутової швидкості рулону 8, блока віднімання 9, задатчика натягу 10, основного блоку антилогарифмування 15 та додаткового блоку антилогарифмування 11, блока обчислення моменту збурення 12, блока компенсації похибки 13, блока додавання 14, суматора 16. Пристрій працює наступним чином. Для забезпечення натягу матеріалу F при поточному радіусі рулону r, що змінюється, корисний момент Mк електродвигуна 3 повинен мати значення Mк = Fr (1) Для цього визначається радіус рулону на основі формули V r= (2) w де V - лінійна швидкість матеріалу, що надходить від датчика 6; w - кутова швидкість рулону, що подається з датчика 5. Після логарифмування виразу (2) отримується ln r = ln V - ln w (3) який реалізується за допомогою блока логарифмування 7, блока логарифмування 8 та блока віднімання 9. Блок додавання 14 обчислює в логарифмічній формі суму заданого натягу Fз від задатчика 10 та радіуса рулону lnUMк = ln Fз + ln r (4) яка після проходження через блок антилогарифмування 15 визначає складову сигналу завдання електропривода 2 відповідно до (1) UМк = Fзr (5) Момент М електродвигуна 3, крім створення корисного моменту Мк , долає момент збурення Мзб , що обумовлений тертям в опорах моталки й згинанням матеріалу на вершині рулону, і який змінюється в ході змотування матеріалу в залежності від радіуса рулону r М = Мк + Мзб = Fr + Mзб (r ) (6) При цьому створюється похибка керування натягу, яка дорівнює різниці між заданим Fз та дійсним натягом F матеріалу DF = Fз - F (7) та яка складається з похибки DFз відпрацювання електроприводом завдання Fз та похибки DFм , обумовленої дією моменту збурення Мзб DF = D Fз + DFм (8) Так як момент збурення Мзб змінюється в процесі змотування матеріалу, то похибка за моментом збурення 0 і дорівнює сумі складових, обумовлених незмінною складовою моменту збурення D Fм та складовими D Fм від першої, другої і т.д. похідних моменту збурення 0 1 2 і DF = D Fм + D Fм + DFм + ... + DFм (9) Для динамічної компенсації похибки DFм , що залежить від радіуса рулону блок антилогарифмування 11 визначає радіус r, а блок 12 обчислює момент збурення hd Eh3 b 2 [ G0 + pbrg(r 2 - r0 )] + (10) 2 24r 2 де h - коефіцієнт тертя в опорах валу моталки; r - питома вага матеріалу; d - діаметр опор валу моталки; h - товщина матеріалу; b - ширина матеріалу; G 0 - вага валу моталки; g - прискорення вільного падіння; Мзб = М т + Мзг = r0 - радіус валу моталки; E - модуль пружності матеріалу. Відповідно до принципу інваріантності для компенсації похибки (9) передаточна функція блока компенсації 13 дорівнює UMзб (p) 1 Wk (p) = = (11) Mзб (р) WM (p) M(p) - передаточна функція електропривода моталки за моментом електродвигуна. UM (p) При налаштуванні контуру керування моменту електродвигуна постійного струму електропривода 2 на технічний оптимум передаточна функція блока компенсації 13 становить UMзб (p) 2T 2 p2 + 2Tp + 1 Wk (p) = = (12) Mзб (р) c / ki де WM(p) = де Т - стала часу силового перетворювача; с - стала кола збудження; ki - коефіцієнт зворотного зв'язку за струмом якоря. Сигнал компенсації UМзб з ви ходу блока 13 додається в суматорі 16 до корисного сигналу (5) Uз = UМк + UМзб (13) а їх сума подається в систему керування 4 електропривода для відпрацювання електродвигуном 3. Завдяки введенню в пристрій нових елементів здійснюється на основі принципу інваріантності компенсація статичної та динамічних складових похибки за моментом збурення, що зменшує загальну похибки й забезпечує підвищення точності керування заданого натягу матеріалу.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for adjusting tension of material when forming a roll
Автори англійськоюKostrytskyi Valerii Vsevolodovych
Назва патенту російськоюУстройство для регулирования натяжения материала при сматывании в рулон
Автори російськоюКострицкий Валерий Всеволодович
МПК / Мітки
МПК: B65H 77/00
Мітки: рулон, пристрій, матеріалу, регулювання, натягу, змотуванні
Код посилання
<a href="https://ua.patents.su/3-70226-pristrijj-dlya-regulyuvannya-natyagu-materialu-pri-zmotuvanni-v-rulon.html" target="_blank" rel="follow" title="База патентів України">Пристрій для регулювання натягу матеріалу при змотуванні в рулон</a>
Пристрій для регулювання натягу плівкового матеріалу при намотці в рулон
Номер патенту: 11496
Опубліковано: 25.12.1996
Автори: Охмакевич Васииль Федорович, Воронецький Ігор Якович
МПК: G11B 15/46, B65H 23/04
Мітки: регулювання, плівкового, намотці, матеріалу, натягу, рулон, пристрій
Формула / Реферат:
Устройство для регулирования натяжения пленочного материала при намотке в рулон, содержащее датчик диаметра рулона и датчик натяжения, подключенный к одному из входов регулятора натяжения, выход которого посредством тиристорного преобразователя электрически связан с двигателем намотки рулона, отличающееся тем, что, с целью повышения качества намотки, оно имеет масштабный усилитель, усилитель-ограничитель и усилитель-ограничитель с зоной...
Пристрій для автоматичного регулювання натягу довгомірного матеріалу
Номер патенту: 11505
Опубліковано: 25.12.1996
Автори: Охмакевич Василь Федорович, Бондарчук Петро Максимович, Ясь Василь Михайлович, Воронецький Ігор Якович
МПК: B65H 77/00
Мітки: регулювання, матеріалу, довгомірного, натягу, автоматичного, пристрій
Формула / Реферат:
Устройство для автоматического регулирования натяжения длинномерного материала, содержащее регулятор скорости, включающий тахогенератор, кинематически связанный с валом электропривода механизма подачи материала, регулятор тока и блок управления, связанные с электроприводом механизма натяжения материала, отличающееся тем, что, с целью повышения точности регулирования, оно имеет потенциометр и дополнительный тахогенератор, электрически...
Пристрій для вимірювання деформації матеріалу
Номер патенту: 3239
Опубліковано: 26.12.1994
Автори: Піцан Роман Михайлович, Лонкевич Євген Сергійович, Винницький Володимир Миколайович
МПК: G01B 7/02
Мітки: деформації, матеріалу, пристрій, вимірювання
Формула / Реферат:
Устройство для измерения деформации материала, содержащее ряд последовательно расположенных секций, каждая из которых включает приводное устройство с электродвигателем, систему управления электродвигателем, измеритель скорости и измеритель натяжения материала, соединенные со входами системы управления. сигнализатор линейной скорости и блок точного измерения модуля упругости материала, выход измерителя скорости соединен со входом сигнализатора...
Пристрій для вимірювання модуля пружності матеріалу, що рухається
Номер патенту: 3238
Опубліковано: 26.12.1994
Автори: Щепан Роман Ярославович, Лонкевич Євген Сергійович, Винницький Володимир Миколайович
МПК: B23P 25/00, G01B 5/30
Мітки: матеріалу, рухається, пристрій, вимірювання, пружності, модуля
Формула / Реферат:
Устройство для измерения модуля упругости движущегося материала, содержащее ряд последовательно соединенных секций, каждая i-я секция включает электродвигатель с приводом, систему управления электродвигателем, измерители скорости и натяжения материала, подключенные ко входам системы управления, сигнализатор линейной скорости, ко входу которого подключен измеритель скорости, блок измерения приведенного модуля упругости материала, к первому и...
Спосіб регулювання натягу на моталці дрібносортного стану
Номер патенту: 63426
Опубліковано: 15.01.2004
Автори: Куваєв Володимир Миколайович, Кекух Анатолій Володимирович, Політов Ігор Віталійович, Карпинський Юрій Пантелеймонович, Скляр Олександр Всеволодович, Щур Віталій Андрійович, Бабенко Михайло Антонович, Шеремет Володимир Олександрович, Козуненко Анатолій Григорович, Чигринський Володимир Олександрович
МПК: B21C 47/00
Мітки: стану, дрібносортного, регулювання, спосіб, моталці, натягу
Формула / Реферат:
Спосіб регулювання натягу на моталці дрібносортного стану, за яким задають натяг прокату шляхом задавання струму приводу моталки і його коректування при змотуванні прокату, який відрізняється тим, що попередньо задають величину прогину прокату за останньою кліттю стану, вимірюють прогин прокату за останньою кліттю стану, а задавання струму приводу моталки коректують у процесі змотування прокату залежно від відхилення вимірюваної величини його...
Попередній патент: Заспокоювач хитавиці судна
Наступний патент: Взуття спеціального призначення
Випадковий патент: Матеріал для зберігання водню із високою ємністю (варіанти), стрічка зі сплаву для зберігання водню, сплав для зберігання водню