Спосіб визначення кута орієнтації плоскої фігури
Номер патенту: 73839
Опубліковано: 15.09.2005
Автори: Білан Степан Миколайович, Коваль Дмитро Михайлович, Білан Сергій Степанович, Кожем'яко Володимир Прокопович, Кормановський Сергій Іванович
Формула / Реферат
Спосіб визначення кута орієнтації плоскої замкненої фігури, який полягає в тому, що до блока пам'яті вводять матрицю ![]() , яка описує зображення еталона, отримане зображення центрують, а потім повертають зображення об'єкта навколо центра на кут
, яка описує зображення еталона, отримане зображення центрують, а потім повертають зображення об'єкта навколо центра на кут ![]() , який відрізняється тим, що здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної, з центра тяжіння зображення фігури визначають два кола з мінімальним радіусом Rmin, що дотичне до найближчої точки та з максимальним радіусом Rmах, який дотичний до контуру у максимально віддаленій точці від центра, коло з радіусом кута
, який відрізняється тим, що здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної, з центра тяжіння зображення фігури визначають два кола з мінімальним радіусом Rmin, що дотичне до найближчої точки та з максимальним радіусом Rmах, який дотичний до контуру у максимально віддаленій точці від центра, коло з радіусом кута ![]() та радіусом
та радіусом ![]() та
та ![]() , визначають площину сектора S1i, що обмежений контуром фігури, максимальним колом та радіус-векторами
, визначають площину сектора S1i, що обмежений контуром фігури, максимальним колом та радіус-векторами ![]() та
та ![]() , площу сектора S2i, що обмежена контуром фігури, мінімальним колом та радіус-векторами
, площу сектора S2i, що обмежена контуром фігури, мінімальним колом та радіус-векторами ![]() та
та ![]() , за формулами
, за формулами
 ,
,
де ![]() ,
, ![]() , здійснюють поворот фігури на кут
, здійснюють поворот фігури на кут ![]() і порівнюють параметри секторів еталонного зображення
і порівнюють параметри секторів еталонного зображення ![]() , поворот здійснюють доти, доки параметри
, поворот здійснюють доти, доки параметри ![]() контрольної фігури не співпадають з параметром
контрольної фігури не співпадають з параметром ![]() еталонного зображення, за кількістю дискретних поворотів визначають кут орієнтації.
еталонного зображення, за кількістю дискретних поворотів визначають кут орієнтації.
Текст
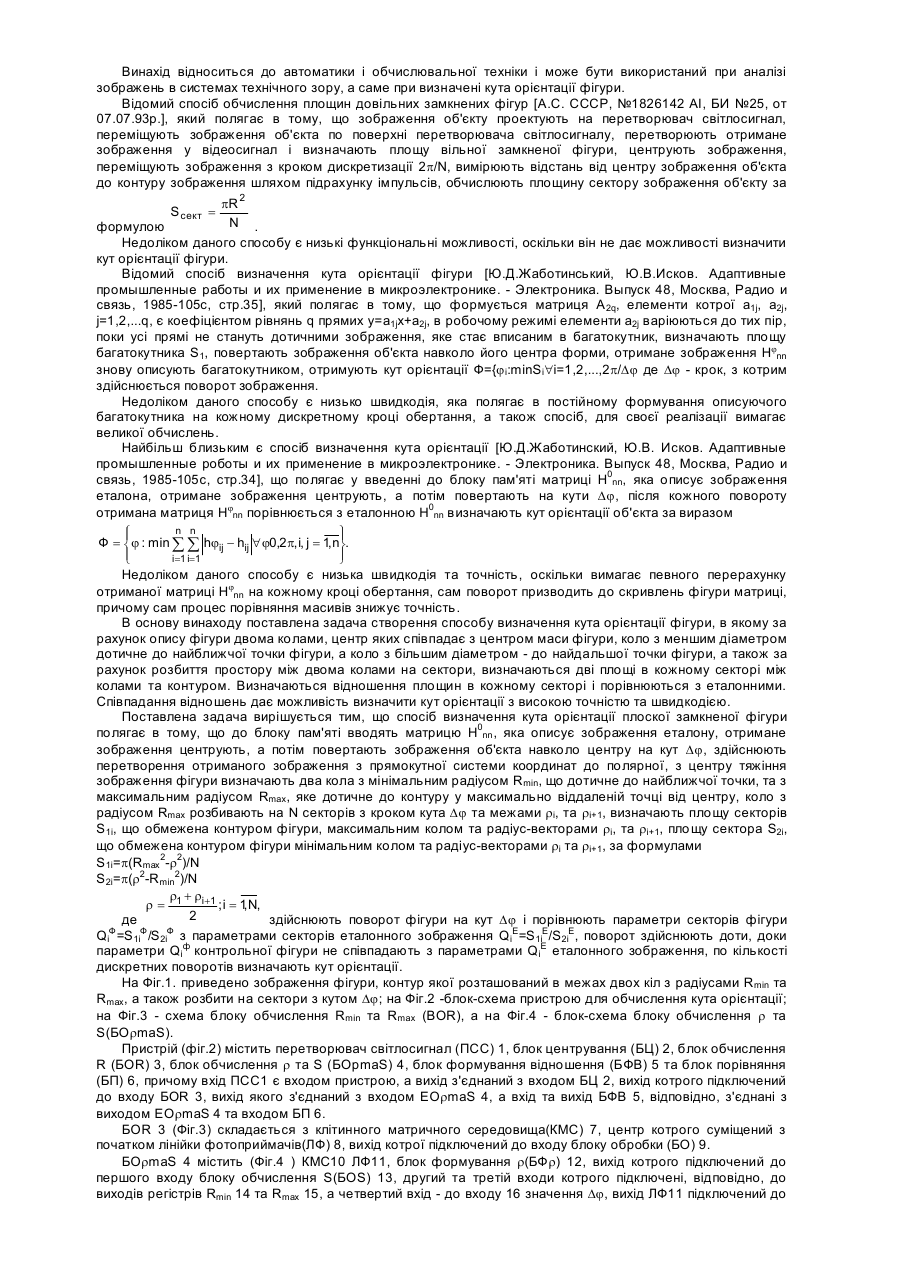
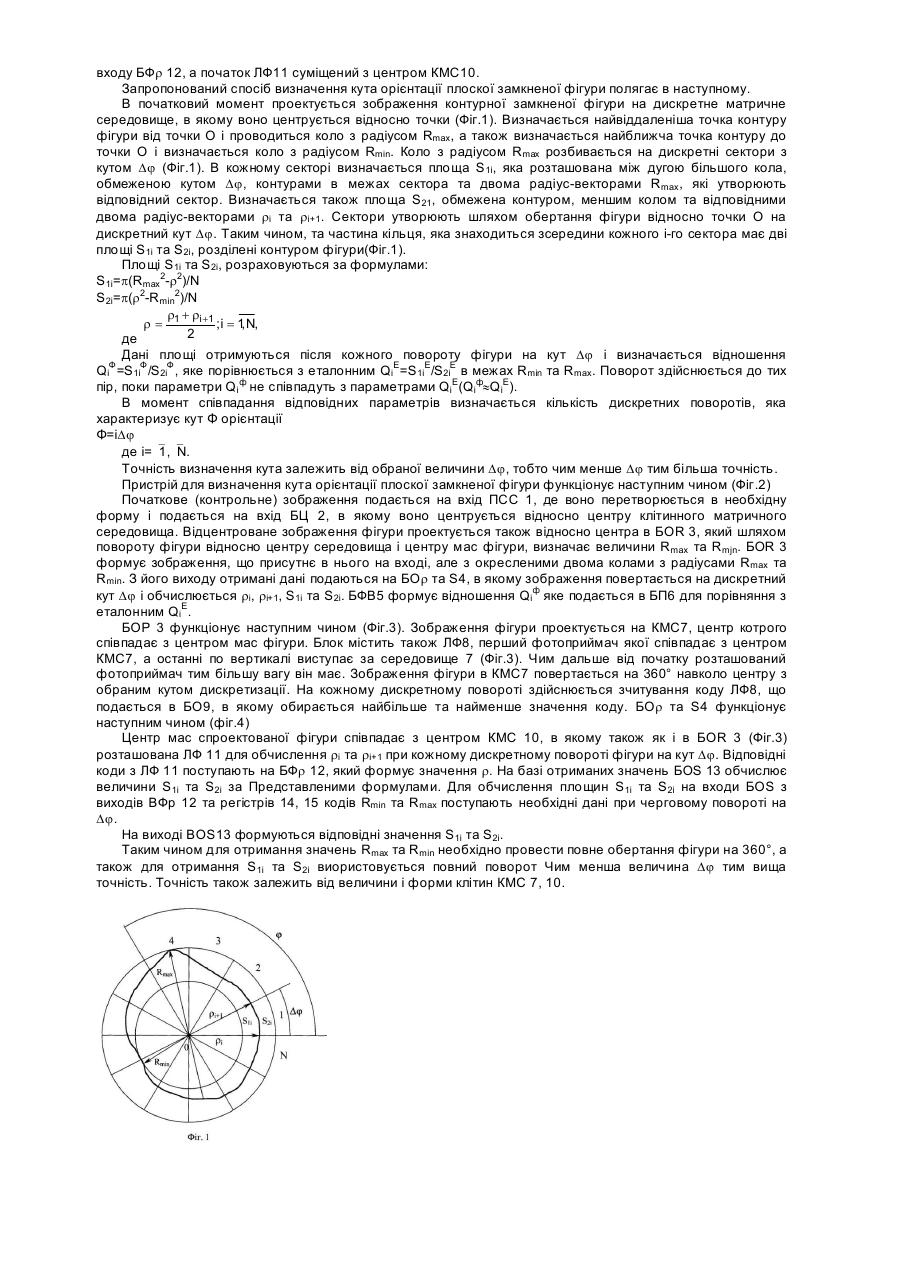
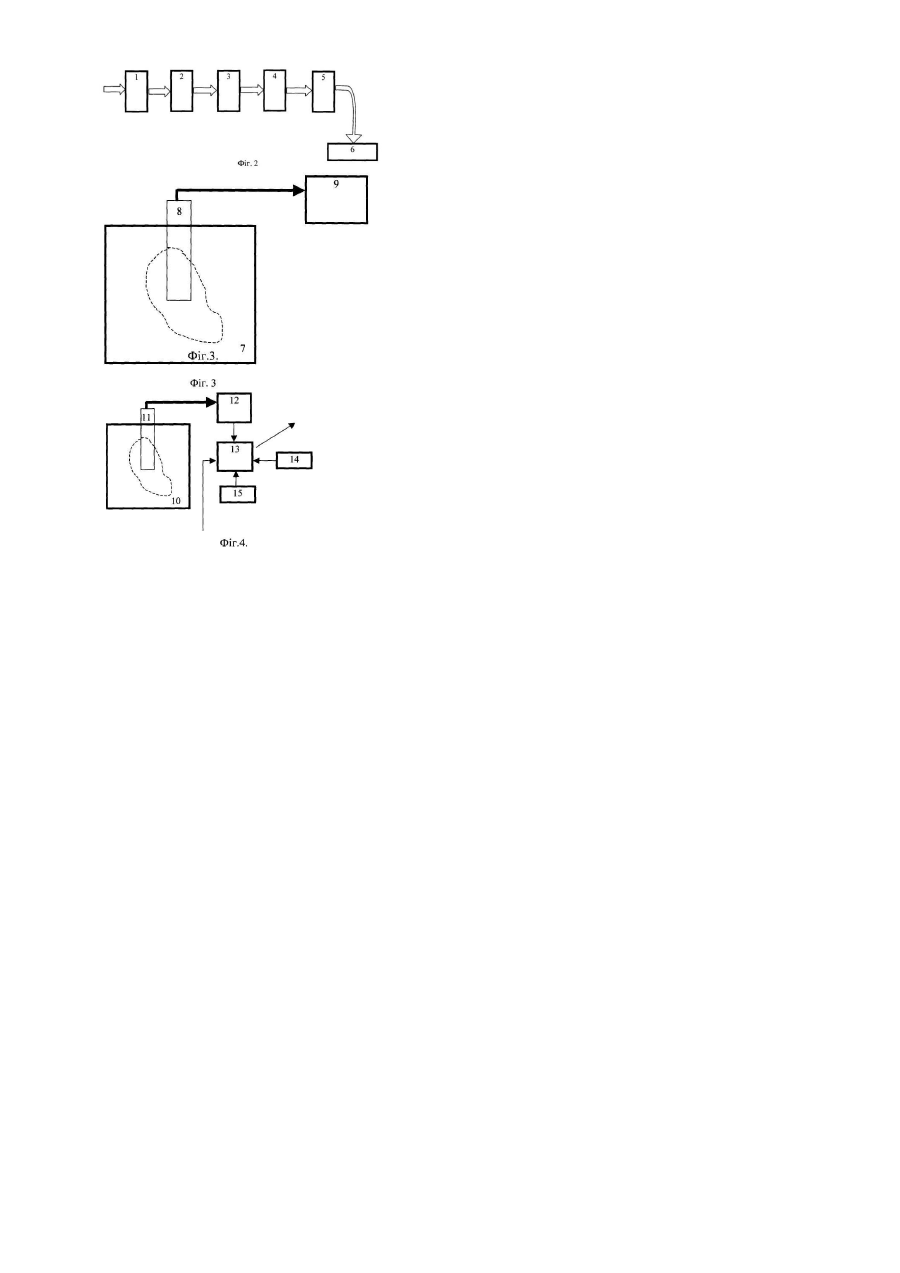
Винахід відноситься до автоматики і обчислювальної техніки і може бути використаний при аналізі зображень в системах технічного зору, а саме при визначені кута орієнтації фігури. Відомий спосіб обчислення площин довільних замкнених фігур [А.С. СССР, №1826142 ΑΙ, БИ №25, от 07.07.93р.], який полягає в тому, що зображення об'єкту проектують на перетворювач світлосигнал, переміщують зображення об'єкта по поверхні перетворювача світлосигналу, перетворюють отримане зображення у відеосигнал і визначають площу вільної замкненої фігури, центрують зображення, переміщують зображення з кроком дискретизації 2p/N, вимірюють відстань від центру зображення об'єкта до контуру зображення шляхом підрахунку імпульсів, обчислюють площину сектору зображення об'єкту за pR 2 N . формулою Недоліком даного способу є низькі функціональні можливості, оскільки він не дає можливості визначити кут орієнтації фігури. Відомий спосіб визначення кута орієнтації фігури [Ю.Д.Жаботинський, Ю.В.Исков. Адаптивные промышленные работы и их применение в микроэлектронике. - Электроника. Выпуск 48, Москва, Радио и связь, 1985-105с, стр.35], який полягає в тому, що формується матриця A2q, елементи котрої a1j, a2j, j=1,2,...q, є коефіцієнтом рівнянь q прямих y=a1jx+a2j, в робочому режимі елементи a2j варіюються до тих пір, поки усі прямі не стануть дотичними зображення, яке стає вписаним в багатокутник, визначають площу багатокутника S1, повертають зображення об'єкта навколо його центра форми, отримане зображення Ηjnn знову описують багатокутником, отримують кут орієнтації Ф={ji:minSi"i=1,2,...,2p/Dj де Dj - крок, з котрим здійснюється поворот зображення. Недоліком даного способу є низько швидкодія, яка полягає в постійному формування описуючого багатокутника на кожному дискретному кроці обертання, а також спосіб, для своєї реалізації вимагає великої обчислень. Найбільш близьким є спосіб визначення кута орієнтації [Ю.Д.Жаботинский, Ю.В. Исков. Адаптивные промышленные роботы и их применение в микроэлектронике. - Электроника. Выпуск 48, Москва, Радио и связь, 1985-105с, стр.34], що полягає у введенні до блоку пам'яті матриці Η0nn, яка описує зображення еталона, отримане зображення центрують, а потім повертають на кути Dj, після кожного повороту отримана матриця Ηjnn порівнюється з еталонною Η0nn визначають кут орієнтації об'єкта за виразом n n ì ü ï ï Ф = í j : min å å hjij - hij " j0,2 p, i, j = 1, ný. ï ï i =1 i=1 î þ Недоліком даного способу є низька швидкодія та точність, оскільки вимагає певного перерахунку отриманої матриці Ηjnn на кожному кроці обертання, сам поворот призводить до скривлень фігури матриці, причому сам процес порівняння масивів знижує точність. В основу винаходу поставлена задача створення способу визначення кута орієнтації фігури, в якому за рахунок опису фігури двома колами, центр яких співпадає з центром маси фігури, коло з меншим діаметром дотичне до найближчої точки фігури, а коло з більшим діаметром - до найдальшої точки фігури, а також за рахунок розбиття простору між двома колами на сектори, визначаються дві площі в кожному секторі між колами та контуром. Визначаються відношення площин в кожному секторі і порівнюються з еталонними. Співпадання відношень дає можливість визначити кут орієнтації з високою точністю та швидкодією. Поставлена задача вирішується тим, що спосіб визначення кута орієнтації плоскої замкненої фігури полягає в тому, що до блоку пам'яті вводять матрицю Η0nn , яка описує зображення еталону, отримане зображення центрують, а потім повертають зображення об'єкта навколо центру на кут Dj, здійснюють перетворення отриманого зображення з прямокутної системи координат до полярної, з центру тяжіння зображення фігури визначають два кола з мінімальним радіусом Rmin, що дотичне до найближчої точки, та з максимальним радіусом Rmax, яке дотичне до контуру у максимально віддаленій точці від центру, коло з радіусом Rmax розбивають на N секторів з кроком кута Dj та межами ri, та ri+1, визначають площу секторів S1i, що обмежена контуром фігури, максимальним колом та радіус-векторами ri, та ri+1, площу сектора S2i, що обмежена контуром фігури мінімальним колом та радіус-векторами ri та ri+1, за формулами S1i=p(Rmax2-r2)/N S2i=p(r2-Rmin2)/N r +r r = 1 i +1 ; i = 1 N, , 2 де здійснюють поворот фігури на кут Dj і порівнюють параметри секторів фігури S сект = QiФ =S1iФ /S2iФ з параметрами секторів еталонного зображення QiE=S1iE/S2iE, поворот здійснюють доти, доки параметри Qiф контрольної фігури не співпадають з параметрами QiE еталонного зображення, по кількості дискретних поворотів визначають кут орієнтації. На Фіг.1. приведено зображення фігури, контур якої розташований в межах двох кіл з радіусами Rmin та Rmax, а також розбити на сектори з кутом Dj; на Фіг.2 -блок-схема пристрою для обчислення кута орієнтації; на Фіг.3 - схема блоку обчислення Rmin та Rmax (BOR), а на Фіг.4 - блок-схема блоку обчислення r та S(БOrmaS). Пристрій (фіг.2) містить перетворювач світлосигнал (ПСС) 1, блок центрування (БЦ) 2, блок обчислення R (БOR) 3, блок обчислення r та S (БOpmaS) 4, блок формування відношення (БФВ) 5 та блок порівняння (БП) 6, причому вхід ПСС1 є входом пристрою, а вихід з'єднаний з входом БЦ 2, вихід котрого підключений до входу БOR 3, вихід якого з'єднаний з входом EOrmaS 4, а вхід та вихід БФВ 5, відповідно, з'єднані з виходом EOrmaS 4 та входом БП 6. БOR 3 (Фіг.3) складається з клітинного матричного середовища(КМС) 7, центр котрого суміщений з початком лінійки фотоприймачів(ЛФ) 8, вихід котрої підключений до входу блоку обробки (БО) 9. БOrmaS 4 містить (Фіг.4 ) КМС10 ЛФ11, блок формування r(БФr) 12, вихід котрого підключений до першого входу блоку обчислення S(БOS) 13, другий та третій входи котрого підключені, відповідно, до виходів регістрів Rmin 14 та Rmax 15, а четвертий вхід - до входу 16 значення Dj, вихід ЛФ11 підключений до входу БФr 12, а початок ЛФ11 суміщений з центром КМС10. Запропонований спосіб визначення кута орієнтації плоскої замкненої фігури полягає в наступному. В початковий момент проектується зображення контурної замкненої фігури на дискретне матричне середовище, в якому воно центрується відносно точки (Фіг.1). Визначається найвіддаленіша точка контуру фігури від точки О і проводиться коло з радіусом Rmax, а також визначається найближча точка контуру до точки О і визначається коло з радіусом Rmin. Коло з радіусом Rmax розбивається на дискретні сектори з кутом Dj (Фіг.1). В кожному секторі визначається площа S 1i, яка розташована між дугою більшого кола, обмеженою кутом Dj, контурами в межах сектора та двома радіус-векторами Rmax, які утворюють відповідний сектор. Визначається також площа S21, обмежена контуром, меншим колом та відповідними двома радіус-векторами ri та ri+1. Сектори утворюють шляхом обертання фігури відносно точки О на дискретний кут Dj. Таким чином, та частина кільця, яка знаходиться зсередини кожного і-го сектора має дві площі S1i та S2i, розділені контуром фігури(Фіг.1). Площі S1i та S2i, розраховуються за формулами: S1i=p(Rmax2-r2)/N S2i=p(r2-Rmin2)/N r +r r = 1 i +1 ; i = 1 N, , 2 де Дані площі отримуються після кожного повороту фігури на кут Dj i визначається відношення QiФ =S1iФ /S2iФ , яке порівнюється з еталонним QiE=S1iE/S2iE в межах Rmin та Rmax. Поворот здійснюється до тих пір, поки параметри Qi ф не співпадуть з параметрами QiE(Qiф»QiE). В момент співпадання відповідних параметрів визначається кількість дискретних поворотів, яка характеризує кут Φ орієнтації Φ=iDj де i=`1,`N. Точність визначення кута залежить від обраної величини Dj, тобто чим менше Dj тим більша точність. Пристрій для визначення кута орієнтації плоскої замкненої фігури функціонує наступним чином (Фіг.2) Початкове (контрольне) зображення подається на вхід ПСС 1, де воно перетворюється в необхідну форму і подається на вхід БЦ 2, в якому воно центрується відносно центру клітинного матричного середовища. Відцентроване зображення фігури проектується також відносно центра в БOR 3, який шляхом повороту фігури відносно центру середовища і центру мас фігури, визначає величини Rmax та Rmjn. БOR 3 формує зображення, що присутнє в нього на вході, але з окресленими двома колами з радіусами Rmax та Rmin. З його виходу отримані дані подаються на БОr та S4, в якому зображення повертається на дискретний кут Dj і обчислюється ri, ri+1, S1i та S2i. БФВ5 формує відношення Qiф яке подається в БП6 для порівняння з еталонним QiЕ. БОР 3 функціонує наступним чином (Фіг.3). Зображення фігури проектується на КМС7, центр котрого співпадає з центром мас фігури. Блок містить також ЛФ8, перший фотоприймач якої співпадає з центром КМС7, а останні по вертикалі виступає за середовище 7 (Фіг.3). Чим дальше від початку розташований фотоприймач тим більшу вагу він має. Зображення фігури в КМС7 повертається на 360° навколо центру з обраним кутом дискретизації. На кожному дискретному повороті здійснюється зчитування коду ЛФ8, що подається в БО9, в якому обирається найбільше та найменше значення коду. БОr та S4 функціонує наступним чином (фіг.4) Центр мас спроектованої фігури співпадає з центром КМС 10, в якому також як і в БOR 3 (Фіг.3) розташована ЛФ 11 для обчислення ri та ri+1 при кожному дискретному повороті фігури на кут Dj. Відповідні коди з ЛФ 11 поступають на БФr 12, який формує значення r. На базі отриманих значень БOS 13 обчислює величини S1i та S2i за Представленими формулами. Для обчислення площин S1i та S2i на входи БOS з виходів ВФр 12 та регістрів 14, 15 кодів Rmin та Rmax поступають необхідні дані при черговому повороті на Dj. На виході BOS13 формуються відповідні значення S1i та S2i. Таким чином для отримання значень Rmax та Rmin необхідно провести повне обертання фігури на 360°, а також для отримання S1i та S2i виористовується повний поворот Чим менша величина Dj тим вища точність. Точність також залежить від величини і форми клітин КМС 7, 10.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the angular orientation of a planar figure
Автори англійськоюKozhemyako Volodymyr Prokopovych, Kormanovskyi Serhii Ivanovych, Bilan Stepan Mykolaiovych, Bilan Serhii Stepanovych, Koval Dmytro Mykhailovych
Назва патенту російськоюСпособ определения угловой ориентации плоской фигуры
Автори російськоюКожемяко Владимир Прокофьевич, Кормановский Сергей Иванович, Билан Степан Николаевич, Билан Сергей Степагович, Коваль Дмитрий Михайлович
МПК / Мітки
МПК: G06K 9/00, H04N 7/18, G06T 7/60
Мітки: орієнтації, фігури, спосіб, кута, визначення, плоскої
Код посилання
<a href="https://ua.patents.su/3-73839-sposib-viznachennya-kuta-oriehntaci-plosko-figuri.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кута орієнтації плоскої фігури</a>
Спосіб визначення об’єму довільної фігури обертання

Номер патенту: 37004
Опубліковано: 16.04.2001
Автор: Ільницький Віталій Анатолійович
МПК: H04N 7/18
Мітки: об'єму, спосіб, довільно, визначення, обертання, фігури
Текст:
...стовпчиком перетворювача і переносять зображення об'єкта вліво до співпадання вісі обертання фігури з крайнім лівим стовпчиком перетворювача, переміщують зображення об'єкта вниз по поверхні перетворювача світло - сигналу з кроком дискретизації, який дорівнює відстані між двома сусідніми рядками перетворювача, при цьому на кожному кроці знаходять відстань від першого рядка до кінця контура зображення, знаходять відстань від другого рядка...
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури
Номер патенту: 7027
Опубліковано: 15.06.2005
Автори: Білан Степан Миколайович, Гринюк Ірина Миколаївна, Кондратенко Наталія Романівна
Мітки: елементів, основі, плоских, фігур, зображень, площин, розпізнавання, відношень, фігури, спосіб
Формула / Реферат:
Спосіб розпізнавання зображень плоских фігур на основі відношень площин елементів фігури, що включає центрування вхідного зображення за допомогою блока центрування пристрою, повертання зображення об'єкта навколо центра на дискретний кут за допомогою блока обробки та S (БО
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки

Номер патенту: 31171
Опубліковано: 15.12.2000
Автори: Круцяк Володимир Миколайович, Ушенко Олександр Григорович, Григоришин Петро Михайлович, Пішак Василь Павлович, Антонюк Ольга Петрівна, Ушенко Юрій Олександрович
МПК: A61N 5/06
Мітки: колагенових, спосіб, кістки, фібрил, волокон, визначення, остеонів, орієнтації
Формула / Реферат:
Спосіб визначення орієнтації фібрил колагенових волокон остеонів кістки полягає у тому, що формують мікроскопічне зображення мікропрепарату кістки у схрещених поляризаторі та аналізаторі, візуально оцінюють орієнтацію фібрил колагенових волокон остеонів за напрямками освітлених ділянок у мікроскопічному поляризаційному зображенні мікропрепарату кістки який відрізняється тим, що використовують висококогерентне плоскополяризоване...
Спосіб визначення спектра фази плоскої світлової хвилі, відбитої плоскопаралельним середовищем
Номер патенту: 5764
Опубліковано: 15.03.2005
Автори: Кособуцький Петро Сидорович, Моргуліс Алла Михайлівна, Каркульовська Мар'яна Савівна, Кособуцький Ярослав Петрович
МПК: G01R 27/02, G01R 27/04
Мітки: хвилі, фазі, спектра, плоскопаралельним, середовищем, відбитої, спосіб, світлової, плоскої, визначення
Формула / Реферат:
Спосіб визначення спектра фази плоскої світлової хвилі під час відбиття її від плоскопаралельного прозорого середовища, що включає вимірювання амплітудного спектра відбиття та визначення спектра фази, який відрізняється тим, що на даній частоті вимірюють значення коефіцієнта відбиття R(ω) і по обвідних максимумах вимірюють значення коефіцієнта відбиття в максимумі смуги інтерференції Rmax(ω), і фазу визначають за формулою
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Нестеренко Олег Іванович, Збруцький Олександр Васильович, Маринич Юрій Михайлович
МПК: G01C 19/00
Мітки: орієнтації, об'єкта, спосіб, визначення, кутової
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Попередній патент: Вогнетривка бетонна суміш
Наступний патент: Спосіб виготовлення заготівок з дрібнозернистих матеріалів
Випадковий патент: Газовий пальник