Спосіб наведення лінії прицілювання для системи керування озброєнням об’єктів бронетанкової техніки
Номер патенту: 75129
Опубліковано: 15.03.2006
Автори: Замосенчук Володимир Миколайович, Ревякин Леонід Дмитрович, Гордієнко Валентин Іванович, Хомченко Олексій Якович
Формула / Реферат
Спосіб наведення лінії прицілювання системи керування озброєнням об'єктів бронетанкової техніки, який полягає в тому, що формують плавну кутову швидкість наведення ![]() лінії прицілювання пропорційно квадрату кута повороту органів керування пульта наведення відповідно до виразу
лінії прицілювання пропорційно квадрату кута повороту органів керування пульта наведення відповідно до виразу ![]() , де
, де ![]() - коефіцієнт пропорційності,
- коефіцієнт пропорційності, ![]() - кут повороту елементів керування пульта наведення в горизонтальній або вертикальній площині, при цьому при повороті органів керування пульта наведення на задані фіксовані кути проводять стрибкоподібне змінення максимальної плавної швидкості наведення, який відрізняється тим, що здійснюють керування максимальною плавною кутовою швидкістю наведення
- кут повороту елементів керування пульта наведення в горизонтальній або вертикальній площині, при цьому при повороті органів керування пульта наведення на задані фіксовані кути проводять стрибкоподібне змінення максимальної плавної швидкості наведення, який відрізняється тим, що здійснюють керування максимальною плавною кутовою швидкістю наведення ![]() лінії прицілювання в залежності від зміни кратності збільшення Гоc оптичної системи прицілювання, відповідно до виразу:
лінії прицілювання в залежності від зміни кратності збільшення Гоc оптичної системи прицілювання, відповідно до виразу: ![]() , де
, де ![]() - коефіцієнт пропорційності,
- коефіцієнт пропорційності, ![]() – максимальне значення кутової швидкості наведення, а при супроводженні цілі проводять вимір дальності до цілі
– максимальне значення кутової швидкості наведення, а при супроводженні цілі проводять вимір дальності до цілі ![]() і встановлюють значення максимальної плавної кутової швидкості наведення, згідно з виразом :
і встановлюють значення максимальної плавної кутової швидкості наведення, згідно з виразом : ![]() , причому скидання обмеження максимальної плавної кутової швидкості наведення за дальністю до цілі проводять при скиданні показників дальності до цілі, а також шляхом повороту елементів керування пульта наведення на задані фіксовані кути.
, причому скидання обмеження максимальної плавної кутової швидкості наведення за дальністю до цілі проводять при скиданні показників дальності до цілі, а також шляхом повороту елементів керування пульта наведення на задані фіксовані кути.
Текст
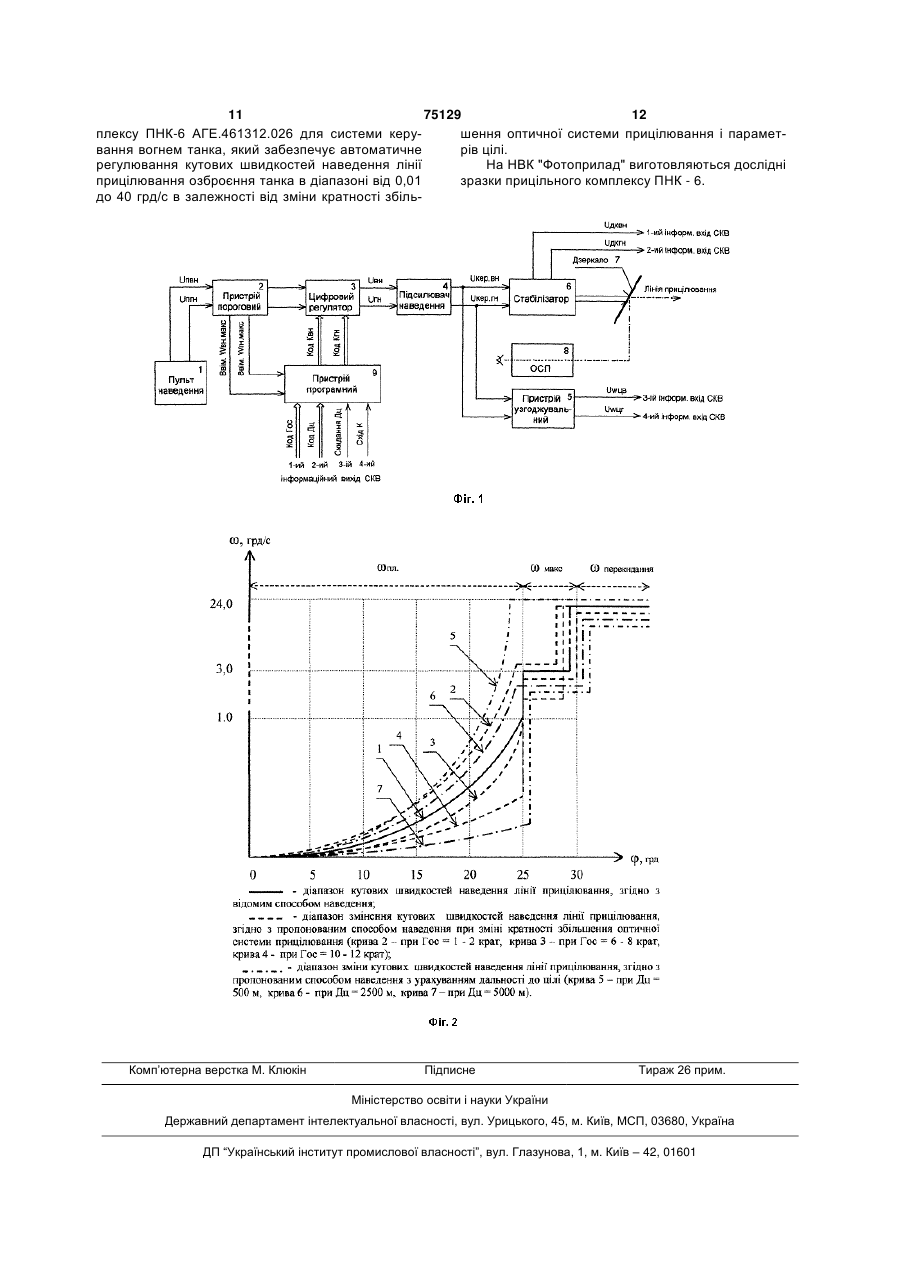
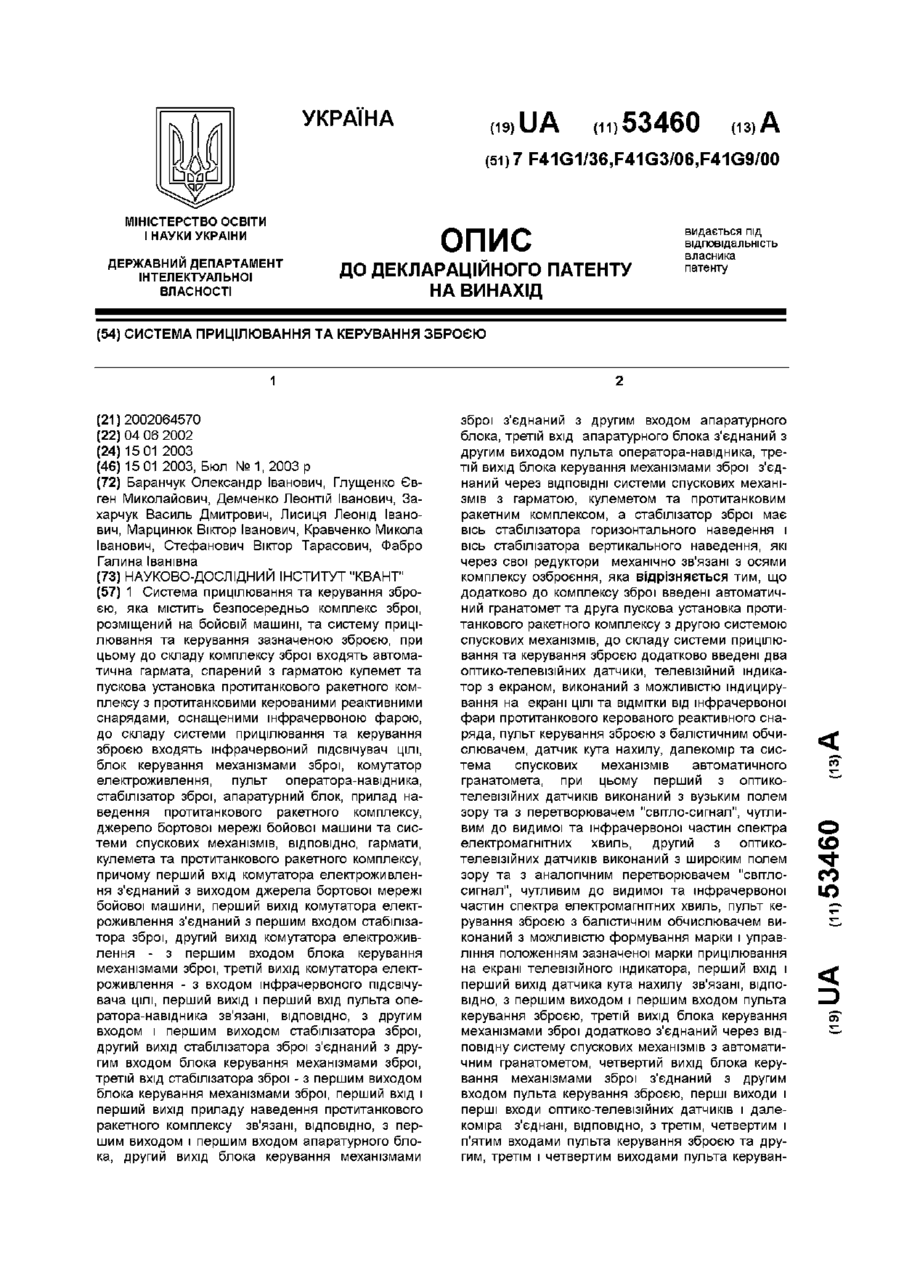
Спосіб наведення лінії прицілювання системи керування озброєнням об'єктів бронетанкової техніки, який полягає в тому, що формують плавну кутову швидкість наведення пл лінії прицілювання пропорційно квадрату кута повороту органів керування пульта наведення відповідно до виразу 2 (19) 1 3 75129 4 вертикальній площині, при цьому при повороті або рукояток пульта наведення у вертикальній органів керування пульта наведення на задані площині. фіксовані кути проводять стрибкоподібне змінення При повороті корпуса пульта наведення прицімаксимальної плавної швидкості наведення, прилу у горизонтальній площині до кутів 25-27 грд., а чому значення максимальної плавної і стрибкопорукояток пульта наведення у вертикальній площидібної зміни кутової швидкості наведення прицілу ні до кутів 27-29 грд., відбувається плавна зміна задаються вручну. Наведення лінії прицілювання кутової швидкості наведення за напрямком і за для керованого снаряда у відомому способі здійсвисотою в діапазоні від 0,05 до 1,0 грд/с. При донюється шляхом зменшення у два рази максимасягненні вказаних кутів відбувається стрибкоподільної плавної кутової швидкості наведення за вибне змінення значень плавної кутової швидкості сотою при вмиканні режиму наведення керованого наведення за напрямком і висотою до величини 3 снаряда, а при сході (пострілі) керованого снаряда грд/с, що відповідає максимальній кутовій швидкозменшують у два рази максимальну плавну кутову сті наведення. швидкість наведення за напрямком і вимикають При повороті корпуса пульта наведення прицістрибкоподібне змінення максимальної плавної лу до упорів (29-32 грд.), пристрій пороговий форшвидкості наведення за висотою і напрямком. мує сигнал "Перекид" і відбувається стрибкоподібКанал наведення прицілу з незалежною лінією не змінення максимальної кутової швидкості прицілювання (див. Изделия 1Г46. Руководство по наведення за напрямком до величини швидкості эксплуатации АГИ 2.378.006 РЭ.- Черкассы : НПК перекиду 16-24 грд/с. "Фотоприбор".- 1998.- с.64-73, 138, 139 ), що реаліНедоліки відомого способу наведення лінії зує даний спосіб наведення лінії прицілювання прицілювання при його використанні в системах системи керування озброєнням танка, містить керування озброєнням об'єкта бронетанкової техпульт наведення, пристрій пороговий, підсилювач ніки полягають у наступному : потужності, пристрій узгоджувальний, гіростабілі- в низькій ефективності ведення пошуку і визатор, вихідне дзеркало оптичної системи приціявлення цілей, із-за відсутності керування діапалювання, при цьому перший і другий виходи пульзоном кутових швидкостей наведення лінії приціта наведення через пристрій пороговий і лювання при зміні кратності збільшення оптичної підсилювач потужності підключені до першого і системи прицілювання ; другого входу пристрою узгоджувального і гіроста- в низькій точності стеження за рухомою цілбілізатора, який кінематичне зв'язаний з вихідним лю, що викликано "жорстко" встановленим знадзеркалом оптичної системи прицілювання, а на ченням максимальної плавної кутової швидкості керувальні входи пристрою порогового надходить наведення лінії прицілювання ; сигнал вибору керованого снаряда і сигнал сходу - у великих допусках відхилення керованого керованого снаряда з пускової установки. снаряда від лінії прицілювання при його наведенні При цьому наведення лінії прицілювання сисна ціль. теми керування озброєнням танка здійснюється Ці недоліки суттєво знижують ефективність наступним чином. ведення стрільби із озброєння об'єктів бронетанПовертаючи корпус пульта наведення в горикової техніки. зонтальній площині і його рукоятки у вертикальній В основу винаходу поставлено завдання удоплощині, сполучають прицільну марку оптичної сконалення системи керування озброєнням об'єксистеми прицілювання з обраною ціллю. При цьотів бронетанкової техніки, в якій за рахунок реаліму пульт наведення формує сигнали Urn і UBH, зації пропонованого способу наведення лінії пропорційні квадрату кута розвороту корпуса прицілювання, забезпечується підвищення ефекпульта наведення і його рукояток навколо вертитивності ведення стрільби із озброєння. кальної і горизонтальної осей відповідно, які через Суть пропонованого способу наведення лінії пристрій пороговий і підсилювач потужності навеприцілювання для системи керування озброєнням дення поступають на моментні двигуни горизонтаоб'єкта бронетанкової техніки полягає у наступнольного (ДМГН) і вертикального (ДМВН) наведення му. гіростабілізатора прицілу. Під дією моментів, що Як відомо, [див. Литвиненко В.М. Танковые створюють ДМГН і ДМВН, пропорційних сигналам прицелы // Зарубежное военное обозрение.UFH і UBH, гіроскопи гіростабілізатора починають 1991.- №4.- с.27-34] особливістю оптичних прицілів прецесувати і розвертати навколо осі коливання є наявність, як правило, змінної кратності збількінематичне зв'язані з ними вихідні дзеркала оптишення оптичних систем прицілювання. Так, для чної системи прицілювання, забезпечуючи візуашвидкого обзору місцевості і виявлення ділянок льне переміщення прицільної марки оптичної сисможливого знаходження цілей використовують теми прицілювання (лінії прицілювання) до цілі. кратність збільшення від 1 до 3 крат, яка забезпечує велике кутове поле зору оптичної системи Таким чином, кутові швидкості наведення пл прицілювання. Відповідно, для виконання цих фулінії прицілювання по висоті і напрямку пропорційнкціональних завдань необхідно забезпечення ні, відповідно, значенням сигналів Urn і UBH і знаякомога більшого діапазону кутових швидкостей ходяться у квадратичній залежності від кутів повонаведення лінії прицілювання. В цих випадках роту корпуса пульта наведення прицілу і його значення максимальної кутової швидкості наве2 рукояток, відповідно до виразу : пл кх , де к дення може сягати до 60грд/с. Виявлення і розпізнавання цілей проводять, як коефіцієнт пропорційності, - кут повороту корпуправило, при кратності збільшення оптичної сисса пульта наведення у горизонтальній площині теми прицілювання від 6 до 8 крат. 5 75129 6 Прицілювання і ведення вогню із озброєння технічного призначення системи керування озброоб'єкта проводять при максимальній кратності збієнням об'єкта і розраховують шляхом вибору коельшення оптичної системи прицілювання (від 10 фіцієнта пропорційності К1. Причому, при повороті до 12 крат), при цьому значення максимальної елементів керування пульта наведення на задані кутової швидкості наведення складає не більше фіксовані кути ( наприклад, при яких проводиться 1грд/с. стрибкоподібне зміненя максимальної швидкості Очевидно, чим більше кратність збільшення, наведення ), а також при скиданні показників датим менше кутове поле зору оптичної системи льності до цілі здійснюють скидання обмеження прицілювання, отже потрібно і менше значення максимальної плавної кутової швидкості наведення за дальністю до цілі. максимальної кутової швидкості наведення 0 Таким чином, регулювання пл макс згідно з лінії прицілювання для виконання функціональних завдань. Тому автоматичне регулювання значення дальністю до цілі забезпечує високу точність вимімаксимальної плавної кутової швидкості наведенру відносної кутової швидкості цілі, а можливість ня пл макс лінії прицілювання в залежності від примусового скидання обмеження пл макс дозвозміни кратності збільшення Гос оптичної системи ляє оперативно здійснювати перенос лінії приціприцілювання, згідно з виразом лювання з однієї цілі на іншу. Для вирішення цього завдання в способі навек1 пл макс 0 / ос , дозволяє підвищити ефекдення лінії прицілювання системи керування тивність системи керування озброєнням за рахуозброєнням об'єкта бронетанкової техніки здійснок вибору оптимального діапазону кутових швиднюють формування плавної кутової швидкості накостей наведення в залежності від завдань, що ведення пл лінії прицілювання пропорційно квавирішуються (пошук цілі, розпізнавання цілі, ведення прицільної стрільби). При цьому коефіцієнт драту кута повороту органів керування пульта пропорційності к1 обирається, виходячи із тактиконаведення згідно з виразом: пл кх 2 , де к технічного призначення озброєння і технічних мокоефіцієнт пропорційності, - кут повороту ележливостей каналу наведення лінії прицілювання ментів керування пульта наведення в горизонтасистеми керування вогнем СКВ. льній або вертикальній площині, при цьому при Відомо також, що для забезпечення прицільповороті органів керування пульта наведення на ної стрільби в системах керування озброєнням задані фіксовані кути проводять стрибкоподібну об'єкта бронетанкової техніки виробляються попзміну максимальної плавної швидкості наведення, равки п в кут бокового упередження і прицілюздійснюють керування максимальною плавною вання, що враховують відносну кутову швидкість кутовою швидкістю наведення пл макс прицілу в ц цілі за напрямком і висотою, що визначається залежності від зміни кратності збільшення Гос опвиразом: п ц п , де п - польотний час снатичної системи прицілювання, згідноз виразом: ряда. к1 пл макс 0 / ос , де к1 - коефіцієнт пропорОчевидно, що ефективність ведення прицільційності, 0 - максимальне значення кутової швиної стрільби за рухомими цілями напряму заледкості наведення, а при супроводженні цілі провожить від точності вимірювання відносної кутової дять вимір дальності до цілі Дц і встановлюють швидкості цілі. значення максимальної плавної кутової швидкості З іншого боку, відносна кутова швидкість цілі наведення, згідно з вираженням: пропорційна кутовій швидкості наведення лінії прицілювання в процесі супроводження цілі. В к1 пл макс 0 / Д ц , причому скидання обмецьому випадку ження максимальної плавної кутової швидкості забезпечення автоматичного переводу діапанаведення за дальністю до цілі проводять шляхом зону кутових швидкостей наведення з режиму поповороту елементів керування пульта наведення шуку цілі на режим супроводження цілі після виміна задані фіксовані кути, а також при скиданні пору дальності до цілі, згідно з запропонованим казників дальності до цілі. способом, відповідно до виразу: Досягнення технічного результату при викорик1 пл макс 0 / Д ц , дозволяє підвищити точстанні пропонованого способу наведення лінії ність вимірювання відносної кутової швидкості с0ц цілі, за рахунок адаптації діапазону кутових швидкостей наведення під параметри обраної цілі (відносну кутову швидкість цілі та її дальність). Т.ч., в цьому випадку забезпечується виконання умови: пл макс ц.макс, де ц.макс - максимально можлива відносна кутова швидкість цілі заданого типу для даної дальності. Вимірювання дальності до цілі Дц забезпечують за допомогою далекоміра системи керування озброєнням об'єкта. Оптимізацію максимальних кутових швидкостей наведення пл макс для заданих типів цілей проводять, виходячи з тактико прицілювання полягає в наступному. 1. Підвищенні ефективності пошуку і виявлення цілей за рахунок узгодження діапазону кутових швидкостей наведення лінії прицілювання з кутовим полем зору оптичної системи прицілювання за рахунок автоматичного керування максимальною плавною кутовою швидкістю наведення пл макс лінії прицілювання в залежності від зміни кратності збільшення Гос оптичної системи прицілювання, к1 відповідно до виразу пл макс 0 / ос , де к1 - коефіцієнт пропорційності, 0 - максимальне значення кутової швидкості наведення. 7 75129 8 2. Підвищенні точності прицілювання за рухоТ.ч., в процесі наведення вихідні сигнали Uпгн і мою ціллю за рахунок забезпечення при супровоUПHB пульта 1 наведення мають такий вираз: 2 дженні цілі виміру дальності до цілі Дц і автоматиUпнг k , Uпнв k 2 , чного регулювання значення максимальної де k - коефіцієнт пропорційності, , - кути повоплавної кутової швидкості наведення, відповідно роту елемента керування пульта наведення, віддо виразу: пл макс к1 0 / Д ц , . При цьому скиповідно, навколо вертикальної і горизонтальної дання обмеження максимальної плавної кутової площині. швидкості наведення за дальністю до цілі провоСигнали Uпнг і Uпнв з виходу пульта 1 наведять шляхом повороту елементів керування пульдення через пристрій 2 пороговий подаються на та наведення на задані фіксовані кути, а також при вхід цифрового регулятора 3. При цьому пристрій скиданні показників дальності до цілі. 2 пороговий при досягненні величини сигналу Uпгн На фіг.1 зображена узагальнена структурна і/або UПBH, що відповідає фіксованому значенню схема каналу наведення лінії прицілювання сискута повороту елементів керування пульта 1 наветеми керування озброєнням об'єкта, що реалізує дення, формує сигнали « Ввім. Wмакс.гн" і пропонований спосіб наведення, а також інформа"ВИМ.Wмакс.ВН", які поступають в пристрій 9 проційні входи і виходи системи керування озброєнграмний і забезпечують вмикання стрибкоподібної ням об'єкта (СКВ). зміни кутових швидкостей наведення і скид обмеНа фіг.2 приведені функціональні залежності ження за дальністю до цілі. зміни кутових швидкостей наведення лінії приціЦифровий регулятор 3 може являти собою білювання від кута повороту елементів керування полярний цифро-аналоговий перетворювач, вхідні пульта наведення відомого способу наведення сигнали якого Uпнг і UПHB є опорними сигналами, а лінії прицілювання і пропонованого способу навецифровий керуючий код перетворювача є вихіддення. ним сигналом пристрою 9 програмного. При цьому, Канал наведення лінії прицілювання системи як відомо, вихідний сигнал біполярного цифрокерування озброєнням об'єкта (див. фіг. 1), що аналогового перетворювача має вираз: реалізує пропонований спосіб наведення лінії приUвих = Uоп х [1-1/2N], цілювання, містить: пульт 1 наведення, пристрій 2 де N - значення цифрового керуючого коду , пороговий, цифровий регулятор 3 сигналів навеUоп - опорна напруга сигналу. дення ( цифровий регулятор), підсилювач 4 потуТаким чином, з допомогою цифрового регуляжності наведення (підсилювач наведення), притора 3 на базі цифро-аналогового перетворювання стрій 5 узгоджувальний, двоплощинний можна забезпечити автоматичне регулювання гіростабілізатор (стабілізатор) 6 поля зору оптичсигналів Uпгн і Uпвн, що надходять з пульта навеної системи прицілювання, дзеркало 7 , оптичну дення, відповідно до виразу: систему 8 прицілювання (О.С.П.), пристрій 9 проUкер.гн = Uпнг/ kгн, Uкер.вн = Uпнв/ kвн, грамний. де Uкер.гн, Uкер.вн - керувальні вихідні сигнали Для забезпечення наведення лінії прицілюцифрового регулятора 3; kвн, kгн - коефіцієнти ревання пульт 1 наведення своїми виходами через гулювання сигналів наведення, які розраховуються пристрій 2 пороговий і цифровий регулятор 3 з'єдв залежності від зміни кратності збільшення оптинаний з підсилювачем 4 потужності наведення, чної системи прицілювання або дальності до цілі з виходи якого підключені до пристрою 5 узгоджуваурахуванням коефіцієнта пропорційності k . льного і стабілізатора 6, причому стабілізатор б Вихідні сигнали цифрового регулятора 3 кінематичне зв'язаний з дзеркалом 7 , на яке проеUкер.гн і Uкер.вн надходять на вхід підсилювача 4 ктується оптична вісь лінії прицілювання оптичної потужності наведення, який забезпечує керування системи 8, а керуючі входи цифрового регулятора моментними двигунами горизонтального і верти3 з'єднані з виходами пристрою 9 програмного. кального наведення (ДМГН і ДМВН) стабілізатора При цьому керуючі входи пристрою 9 програмного 6. Під дією моментів, що створюють ДМГН і ДМВН, є інформаційними виходами системи керування пропорційних сигналам UFH і UBH, гіроскопи стабіліозброєнням об'єкта, а виходи пристрою 5 узгоджузатора 6 починають процесувати і розвертати навального і стабілізатора б є інформаційними вховколо осі качання кінематичне зв'язане з ним дзедами системи керування озброєнням об'єкта. ркало 7, яке змінює напрямок оптичної осі Канал наведення лінії прицілювання системи оптичної системи 8 прицілювання, забезпечуючи керування озброєнням об'єкта (див.фіг.1), що випри цьому керування кутовою швидкістю наведенкористовує пропонований спосіб наведення, праня лінії прицілювання. Таким чином, максимальна цює наступним чином. кутові швидкість наведення пл макс лінії візування Практично забезпечити керування наведенням по горизонту і висоті визначається максимальним лінії прицілювання озброєнням об'єкта можна, назначенням сигналу Uкер.гн і Uкер.вн і змінюється приклад, за допомогою пульта 1 наведення, який уявляє собою механічний пристрій, при повороті по функціональній залежності пл макс 0 / к. елементів керування якого, наприклад, обертаРозрахунок коефіцієнтів регулювання kвн, і kгн ються пари потенціометрів, чи вмикаються по схесигналів наведення здійснюється пристроєм 9 промі квадратичного дільника напруги. При цьому грамним на основі значень кратності збільшення вихідні сигнали пульта 1 наведення Uпнг і UПHB, (сигнал Код Гос) оптичної системи 8 прицілювання що знімаються з потенціометрів, пропорційні, віді дальності до цілі (сигнал Код Дц), що формуютьповідно, квадрату кута повороту елементів керуся системою керування озброєнням об'єкта, і які вання навколо вертикальної і горизонтальної осей. 9 75129 10 поступають на пристрій 9 програмний, відповідно, домий спосіб наведення ( див. крива 1 ) і залежночерез перший і другий інформаційний вихід СКВ. сті зміни кутової швидкості наведення при автомаРегулювання сигналів наведення Uпнг і UПHB з тичному регулюванні максимальної плавної швидврахуванням виміряної величини дальності до цілі, кості наведення, відповідно до пропонованого проводиться автоматично по надходженню кода способу наведення, при його можливій реалізації у дальності. Причому скид обмеження за дальністю виробі 1Г46 (див. криві 2-7). до цілі здійснюють при надходженні сигналів Криві залежності ( див. фіг.2 ) наочно показу«Ввім. Wмакс.гн" і "Вим. Wмакс.вн ", що формують здатність пропонованого способу наведення ються пристроєм 2 пороговим при досягненні кутів адаптувати діапазон плавних кутових швидкостей повороту елементів керування пульта наведення наведення лінії прицілювання до вирішення функфіксованих значень, і при надходженні на пристрій ціональних завдань ( спостереження і пошук цілі 9 програмний через третій інформаційний вихід крива 2, розпізнавання цілі - крива 3, ведення приСКВ сигналу скидання значення виміряної дальноцільної стрільби - крива 4 ), за рахунок обліку зміни сті до цілі " Скид Дц". Це дозволяє оперативно кратності збільшення оптичної системи прицілюздійснювати перенос лінії прицілювання з однієї вання, і до параметрів цілі при її супроводженні, за цілі на іншу і оперативно вимикати обмеження рахунок обліку дальності до цілі (див. криві 5, 6, 7 максимальної кутової швидкості наведення за да). При цьому адаптація діапазону зміни плавних льністю до цілі. кутових швидкостей наведення лінії прицілювання Таким чином, канал наведення лінії прицілюздійснюється автоматично. вання забезпечує формування кутових швидкосТак, наприклад, якщо ведеться прицільна тей наведення лінії прицілювання по висоті і настрільба по швидкісним цілям на близьких дистанпрямку з автоматичним регулюванням ціях, то забезпечується максимально можливий максимальної плавної кутової швидкості наведендіапазон кутових швидкостей наведення лінії приня, відповідно до зміни кратності збільшення оптицілювання (див. крива 5). При веденні прицільної чної системи прицілювання і дальності до цілі. стрільби по цілям, розташованим на максимальДля забезпечення узгодження положення лінії них дистанціях, забезпечується діапазон кутових прицілювання з озброєнням об'єкта використовушвидкостей наведення, що відповідає практично ються датчики кута горизонтального (ДКГН) і верможливим кутовим швидкостям цілей заданого тикального (ДКВН) наведення стабілізатора 6 (на типу ( наприклад, типу "танк" ) на даній дальності фіг.1 не показані), які дозволяють забезпечити (див. крива 7). систему стеження озброєння об'єкта за лінією Для порівняння, при відомому способі навеприцілювання. При цьому з виходу стабілізатора 6 дення у виробі 1Г46, забезпечується "жорсткий" сигнали датчиків ДКГН і ДКВН Uдкгн і Uдквн, продіапазон плавних кутових швидкостей наведення, порційні кутовому положенню лінії прицілювання при цьому максимальне значення плавної кутової за висотою і напрямком, через третій і четвертий швидкості наведення складає 1 грд/с. інформаційні входи системи керування озброєнЦе дозволяє забезпечити якісний процес наням об'єкта поступають на балістичний обчислюведення лінії прицілювання на цілі, розташовані на вач (на фіг.1 не показаний). Одночасно через песередніх дистанціях стрільби озброєння (1800рший і другий інформаційні входи системи 2400 м), але приводить до зниження точності прикерування озброєнням об'єкта на балістичний обцілювання при стрільбі по швидкісним цілям на числювач з виходів пристрою 5 узгоджувального близькій дистанції і цілям, розташованим на дальпоступають сигнали Uwцв і Uwцг, пропорційні відніх дистанціях. носній кутовій швидкості цілі за висотою і напрямТаким чином, пропонований спосіб наведення ком. лінії прицілювання для систем керування озброєнБалістичний обчислювач системи керування ням об'єктів бронетанкової техніки має наступні озброєнням об'єкта при безперервному стеженні переваги перед відомими способами: за сигналами Uдкгн і Uдквн забезпечує автомати- розширення функціональних можливостей чне стеження озброєння об'єкта за положенням використання оптичних систем прицілювання за лінії прицілювання з урахуванням поправок в кут рахунок збільшення робочого діапазону плавних прицілювання і бокового упередження на відносну кутових швидкостей наведення шляхом його адапкутову швидкість цілі (сигнали Uwцв і Uwцг). Т.ч., тації під режими роботи; точність ведення прицільної стрільби озброєння - підвищення ефективності пошуку і виявлення об'єкта напряму залежить від точності наведення цілей за рахунок узгодження діапазону кутових лінії прицілювання на ціль і похибки виміру відносшвидкостей наведення лінії прицілювання з кутоної кутової швидкості цілі. вим полем зору оптичної системи прицілювання Таким чином, практично можна реалізувати шляхом автоматичного керування максимальною досягнення технічного результату при використанплавною кутовою швидкістю наведення лінії прині пропонованого способу наведення лінії приціцілювання в залежності від зміни кратності збільлювання для системи керування озброєнням об'єшення оптичної системи прицілювання; кта бронетанкової техніки. - підвищення точності прицілювання на рухому Для порівняльної оцінки на фіг. 2 приведені ціль за рахунок автоматичної адаптації діапазону залежність зміни кутової швидкості наведення від плавної кутової швидкості наведення до параметкута повороту елементів керування пульта наверів цілі, що забезпечує підвищення точності виміру дення виробу 1Г46 (див. Изделия 1Г46. Техничесвідносної кутової швидкості цілі. кие условия АГИ 2.378.006 ТУ.-Черкассы : НІЖ Пропонований спосіб наведення лінії візуван«Фотоприбор».- 1998.- с. 14-16 ), що реалізує віня використаний при розробці прицільного ком 11 75129 12 плексу ПНК-6 АГЕ.461312.026 для системи керушення оптичної системи прицілювання і параметвання вогнем танка, який забезпечує автоматичне рів цілі. регулювання кутових швидкостей наведення лінії На НВК "Фотоприлад" виготовляються дослідні прицілювання озброєння танка в діапазоні від 0,01 зразки прицільного комплексу ПНК - 6. до 40 грд/с в залежності від зміни кратності збіль Комп’ютерна верстка M. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for aiming sight line for the system of armament control for the armoured machine objects
Автори англійськоюHordienko Valentyn Ihorovych, Khomchenko Oleksii Yakovych, Zamosenchuk Volodymyr Mykolaiovych
Назва патенту російськоюСпособ наведения линии прицеливания для системы управления вооружением объектов бронетанковой техники
Автори російськоюГордиенко Валентин Игоревич, Хомченко Алексей Яковлевич, Замосенчук Владимир Николаевич
МПК / Мітки
Мітки: прицілювання, бронетанкової, об'єктів, лінії, техніки, спосіб, озброєнням, наведення, керування, системі
Код посилання
<a href="https://ua.patents.su/6-75129-sposib-navedennya-lini-pricilyuvannya-dlya-sistemi-keruvannya-ozbroehnnyam-obehktiv-bronetankovo-tekhniki.html" target="_blank" rel="follow" title="База патентів України">Спосіб наведення лінії прицілювання для системи керування озброєнням об’єктів бронетанкової техніки</a>
Система прицілювання та керування зброєю
Номер патенту: 53460
Опубліковано: 15.03.2005
Автори: Кравченко Микола Іванович, Демченко Леонтій Іванович, Марцинюк Віктор Іванович, Лисиця Леонід Іванович, Фабро Галина Іванівна, Стефанович Віктор Тарасович, Захарчук Василь Дмитрович, Баранчук Олександр Іванович, Глущенко Євген Миколайович
МПК: F41G 1/00, F41G 3/06, F41G 9/00
Мітки: зброєю, прицілювання, система, керування
Формула / Реферат:
1. Система прицілювання та керування зброєю, що містить безпосередньо комплекс зброї, розміщений на бойовій машині, і систему прицілювання та керування зазначеною зброєю, при цьому до складу комплексу зброї входять автоматична гармата, спарений з гарматою кулемет та пускова установка протитанкового ракетного комплексу з протитанковими керованими реактивними снарядами, оснащеними інфрачервоною фарою, до складу системи прицілювання та керування...
Система керування озброєнням

Номер патенту: 69347
Опубліковано: 16.08.2004
Автори: Ліпатов Валерій Павлович, Медвідь Володимир Станіславович, Гузь Володимир Іванович, Піронер Ян Михайлович, Мануйлов Володимир Григорович, Протасов Володимир Георгійович, Мілюченков Леонід Володимирович, Яновський Юрій Васильович, Баранчук Олександр Іванович, Коваленко Валерій Володимирович
МПК: F41G 1/00, F41G 3/06, G02B 23/00
Мітки: озброєнням, керування, система
Формула / Реферат:
1. Система керування озброєнням бойової машини, що містить башту, встановлений на осі цапф башти блок озброєння, який має принаймні один тип озброєння, механічно сполучений із блоком озброєння приціл, до складу якого входить прилад спостереження і далекомір, привід наведення блока озброєння в кутомісцевому напрямку та привід наведення башти в азимутальному напрямку, електрично сполучений із озброєнням блок керування механізмами озброєння та...
Спосіб прицілювання
Номер патенту: 52457
Опубліковано: 16.12.2002
Автори: Архипов Микола Іванович, Кравчук Ілля Степанович
МПК: F41G 1/00
Мітки: спосіб, прицілювання
Формула / Реферат:
1. Спосіб прицілювання, при якому вмикають приціл, виконують прицільну марку, одержують відображення прицільної марки на відбивачі прицілу, спостерігають положення прицільної марки відносно цілі і виконують наступне сполучення прицільної марки з ціллю шляхом зміни просторового положення об'єкта техніки з розміщеним на ньому озброєнням, який відрізняється тим, що водночас із включенням прицілу вмикають додаткове джерело формування прицільної...
Спосіб прицілювання стрілецької зброї
Номер патенту: 9248
Опубліковано: 15.09.2005
Автори: Долженков Олександр Федорович, Квітка Леонід Антонович, Васильєв Георгій Іванович
МПК: F41G 3/16
Мітки: спосіб, стрілецької, прицілювання, зброї
Формула / Реферат:
Спосіб прицілювання стрілецької зброї, що включає одночасне спостереження за навколишнім простором і зображення прицільної марки, виявлення цілі та суміщення марки з ціллю, який відрізняється тим, що проводять оптико-електронне формування уявної "фантомної" осі прицілювання, при цьому суміщають зображення відеосигналу цілі, сформованого підствольною телевізійною камерою, який передається до монокулярного пристрою відображення за...
Пристрій указання цілі для системи керування вогнем танка
Номер патенту: 49990
Опубліковано: 15.10.2002
Автори: Походняков Валерій Георгійович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович
Мітки: пристрій, цілі, вогнем, указання, керування, танка, системі
Формула / Реферат:
1. Пристрій указання цілі для системи керування вогнем танка, що містить привід башти, блок керування приводом, прилад цілеуказання, пульт наведення, підсилювач наведення, гіростабілізатор, моментний двигун горизонтального наведення, датчик кута горизонтального наведення, схему горизонтального розвантаження, що включає підсилювач горизонтального розвантаження, датчик кута горизонтального розвантаження і моментний двигун горизонтального...
Попередній патент: Перемикальний пристрій кулачкового контролера двобічної дії
Наступний патент: Стероїдні сполуки, застосування цих сполук для одержання лікарських засобів, які регулюють мейоз, і спосіб одержання цих сполук (варіанти)
Випадковий патент: Модуль профілезгинального стану