Спосіб автоматичного керування процесом осадження дисперсної фази суспензії в згущувачі
Формула / Реферат
Спосіб автоматичного керування процесом осадження дисперсної фази у згущувачі шляхом контролю за швидкістю осадження дисперсної фази у фізичній моделі згущувача та дозування флокулянту у суспензію живлення, який відрізняється тим, що витрати флокулянту з заданою періодичністю змінюють на відому величину, після закінчення перехідного процесу у фізичній моделі згущувача визначають і запам'ятовують швидкість осадження дисперсної фази, порівнюють її значення з попереднім запам'ятованим значенням, а напрям та величину наступної зміни витрат флокулянту у суспензію живлення визначають залежно від величини та знака приросту швидкості осадження.
Текст
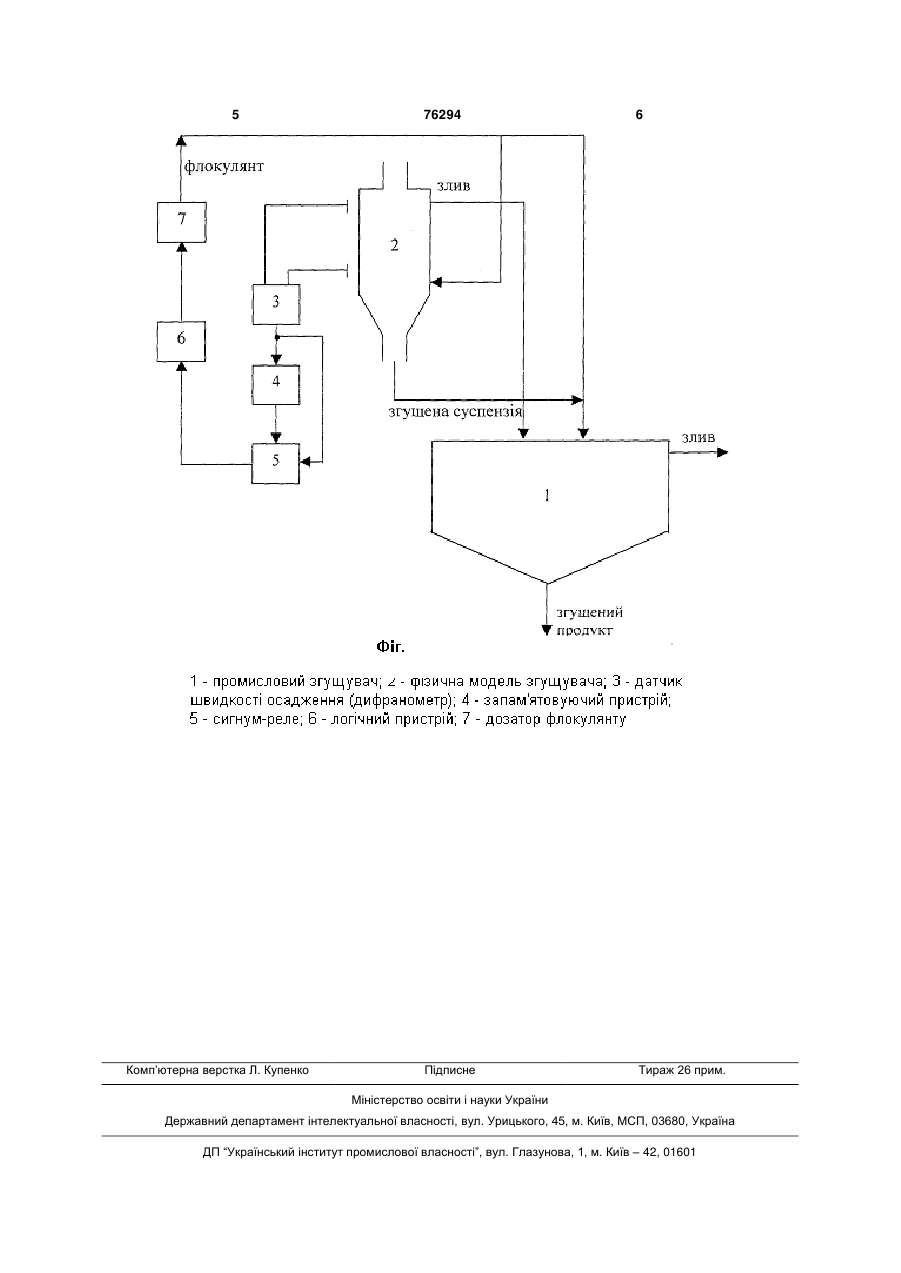
Спосіб автоматичного керування процесом осадження дисперсної фази у згущувачі шляхом контролю за швидкістю осадження дисперсної фази у фізичній моделі згущувача та дозування флокулянту у суспензію живлення, який відрізняється тим, що витрати флокулянту з заданою періодичністю змінюють на відому величину, після закінчення перехідного процесу у фізичній моделі згущувача визначають і запам'ятовують швидкість осадження дисперсної фази, порівнюють її значення з попереднім запам'ятованим значенням, а напрям та величину наступної зміни витрат флокулянту у суспензію живлення визначають залежно від величини та знака приросту швидкості осадження. Винахід відноситься до управління та керування процесами зневоднення і згущення суспензій в збагачувальній, хімічній та інших галузях промисловості. Відомий спосіб автоматичного керування режимом осадження дисперсної фази суспензії в згущувачі шляхом періодичної зміни витрат флокулянту на відому величину, визначені по закінченню перехідного процесу величини витрат концентрату в зливі згущувача, та наступній зміні величини витрат флокулянту в залежності від визначених втрат концентрату в зливі [1]. Завдяки такому способу керування досягається найвища швидкість осадження дисперсної фази, а отже найменші втрати концентрату в зливах. Але через велику інерційність згущувача зміна витрат флокулянту з великим запізненням позначається на якості зливу; отже, пошук найкращого режиму осадження буде досить тривалим, і весь цей час згущувач буде працювати не в оптимальному режимі. Неоптимальними будуть і витрати флокулянту. Найбільш близьким до пропонованого є спосіб керування режимом осадження дисперсної фази, що дозволяє зменшити вплив запізнювання [2]. Для цього регулювання подачі флокулянту у згущувач виконано за допомогою фізичної моделі згущувача, яка працює паралельно з основним апаратом. Проба суспензії, обробленої флокулянтом, безперервно відбирається із завантажувального жолоба основного згущувача та вводиться в апарат для осаджування дисперсної фази, який є фізичною моделлю згущувача. Швидкість осадження дисперсної фази визначається за положенням висоти освітленої рідини в фізичній моделі згущувача, та регулюється зміною витрат флокулянту. Недоліком такого способу керування є те, що в (19) UA (11) 76294 (13) (21) 20040706308 (22) 28.07.2004 (24) 17.07.2006 (46) 17.07.2006, Бюл. № 7, 2006 р. (72) Шпильовий Леонід Вікторович (73) Відкрите акціонерне товариство "Маріупольський металургійний комбінат ім. Ілліча" (56) SU 927266, 15.05.1892 SU 637127, 20.12.1978 SU 808098, 10.03.1981 SU 1530208 A1, 23.12.1989 JP 61125415 A, 13.06.1986 JP 61125413 A, 13.06.1986 JP 58119306 A, 15.07.1983 JP 58153505 A, 12.09.1983 JP 58180209 A, 21.10.1983 C2 ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ 3 76294 4 ньому не враховується екстремальний характер з'єднаний із входом логічного пристрою 6, а вихід залежності швидкості осадження дисперсної фази логічного пристрою - зі входом дозатора флокувід питомих витрат флокулянту. Тому робота сислянту 7. Флокулянт подається в суспензію живтеми автоматичного керування здебільшого лення, яка розподіляються між промисловим згувідбувається в неоптимальному режимі через нещувачем 1 та його фізичною моделлю 2. контрольовану зміну характеристик згущувача, що Спосіб реалізується наступним чином. призводить до невідповідності статичних характеВитрати флокулянту Q періодично в моменти ристик регулятора і об'єкта керування. часу tі отримують дискретне прирощення Qi за Метою даного винаходу є підвищення ефектидопомогою дозатора 7. Після закінчення вності керування режимом осадження дисперсної перехідного процесу у фізичні моделі згущувача 2 фази суспензії у згущувачі за рахунок інтенсифікавимірюється за допомогою датчика 3 - дифманоції швидкості осадження, зниження втрат концентметра, - усталене значення швидкості осадження рату із зливами згущувача та оптимізації витрат дисперсної фази суспензії - і. Величина швидкості флокулянту. осадження - і, порівнюється у сигнум-реле 5 з веПоставлена мета досягається тим, що у споличиною швидкості осадження на попередньому собі автоматичного керування режимом осадженкроці яка фіксується запам'ятовуючим і-1, ня дисперсної фази суспензії в згущувачі періодипристроєм 4 перед зміною витрат флокулянту чно дискретно змінюють витрати флокулянту на Qi+1. Напрям зміни витрат флокулянту відому величину, визначають по закінченню перевизначається в залежності від знаку величини хідного процесу у фізичній моделі швидкість осаприросту швидкості осадження: дження твердої фази, запам'ятовують визначене i i 1 значення швидкості та порівнюють його з попереЯкщо величина і більше попереднього знаднім запам’ятованим значенням; в залежності від чення і-1, то наступний крок робиться в тому ж величини та знаку приросту швидкості визначають напрямі. Зафіксоване в запам'ятовуючому напрям та величину наступної зміни витрат флопристрої 4 на попередньому кроці значення і-1, і кулянту у суспензію живлення. скидається сигналом логічного пристрою 6, а нове Дискретна зміна витрат флокулянту у суспензначення фіксується запам'ятовуючим пристроєм зію живлення згущувача на відому величину та 4. Після цього цикл повторюється. Якщо ж наступаналіз реакції фізичної моделі згущувача на цю не значення швидкості осадження v менше попезміну (визначення швидкості осадження дисперсреднього, то сигнум-реле 5 дає команду логічному ної фази у фізичній моделі згущувача) дозволяє пристрою 6 і наступний крок робиться в зворотньоперативно реагувати на неконтрольовані збурюому напрямі. Величина кожного кроку може бути ючи впливи, викликані зміною параметрів дисперпостійною або змінною, і визначатися за відомим сної фази та дисперсійного середовища, завдяки алгоритмом в залежності від абсолютної величини тому, що інерційність фізичної моделі значно меприросту швидкості осадження. нша інерційності промислового згущувача, та посВикористання даного способу автоматичного лідовно, крок за кроком, наближатися до екстрекерування процесом осадження забезпечує наймуму функції відгуку (найвищого значення вищу швидкість осадження та продуктивність згушвидкості осадження). Такий спосіб керування щувача, і мінімальні втрати дисперсної фази в дозволяє за прийняту кількість кроків досягти екзливі промислового згущувача за мінімальних вистремуму функції, при цьому немає потреби в тритрат флокулянту. Комп'ютерне моделювання ровалому та дорогому дослідженні процесу і його боти системи автоматичного керування режимом математичному моделюванні, а також потреби в осадження підтверджує досягнення технічного автоматичному контролі технологічних параметрів, результату при здійсненні заявленого способу. які є збурюючими впливами. Джерела інформації: Приклад 1. На фігурі представлена 1. А.с. СССР №927266, МКВ3 В01D 21/01, функціональна схема системи автоматичного ке1982. рування, яка реалізує заявлений спосіб керування 2. Технология и автоматизация производства режимом осадження дисперсної фази у згущувачі. калийных удобрений Пермяков Р.С. и др. Л., ХиСистема включає основний згущувач 1, датчик мия, 1973, с.109. швидкості осадження дисперсної фази (дифманометр 3), вихід якого подається на запам'ятовуючий пристрій 4, та сигнум-реле 5. Вихід сигнум-реле 5 Комп’ютерна верстка Л. Купенко 76294 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of the process of precipitating the dispersed phase in the thickener
Автори англійськоюShpyliovyi Leonid Viktorovych
Назва патенту російськоюСпособ автоматического управления процессом осаждения дисперсной фазы суспензии в сгустителе
Автори російськоюШпилевой Леонид Викторович
МПК / Мітки
МПК: G05D 27/00, B01D 21/00
Мітки: суспензії, дисперсної, згущувачі, фазі, автоматичного, керування, осадження, процесом, спосіб
Код посилання
<a href="https://ua.patents.su/3-76294-sposib-avtomatichnogo-keruvannya-procesom-osadzhennya-dispersno-fazi-suspenzi-v-zgushhuvachi.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування процесом осадження дисперсної фази суспензії в згущувачі</a>
Спосіб автоматичного керування процесом осадження твердої фази
Номер патенту: 65879
Опубліковано: 15.04.2004
Автори: Білецький Володимир Стефанович, Шпильовий Леонід Вікторович
МПК: B01D 21/00
Мітки: автоматичного, спосіб, твердої, керування, осадження, фазі, процесом
Формула / Реферат:
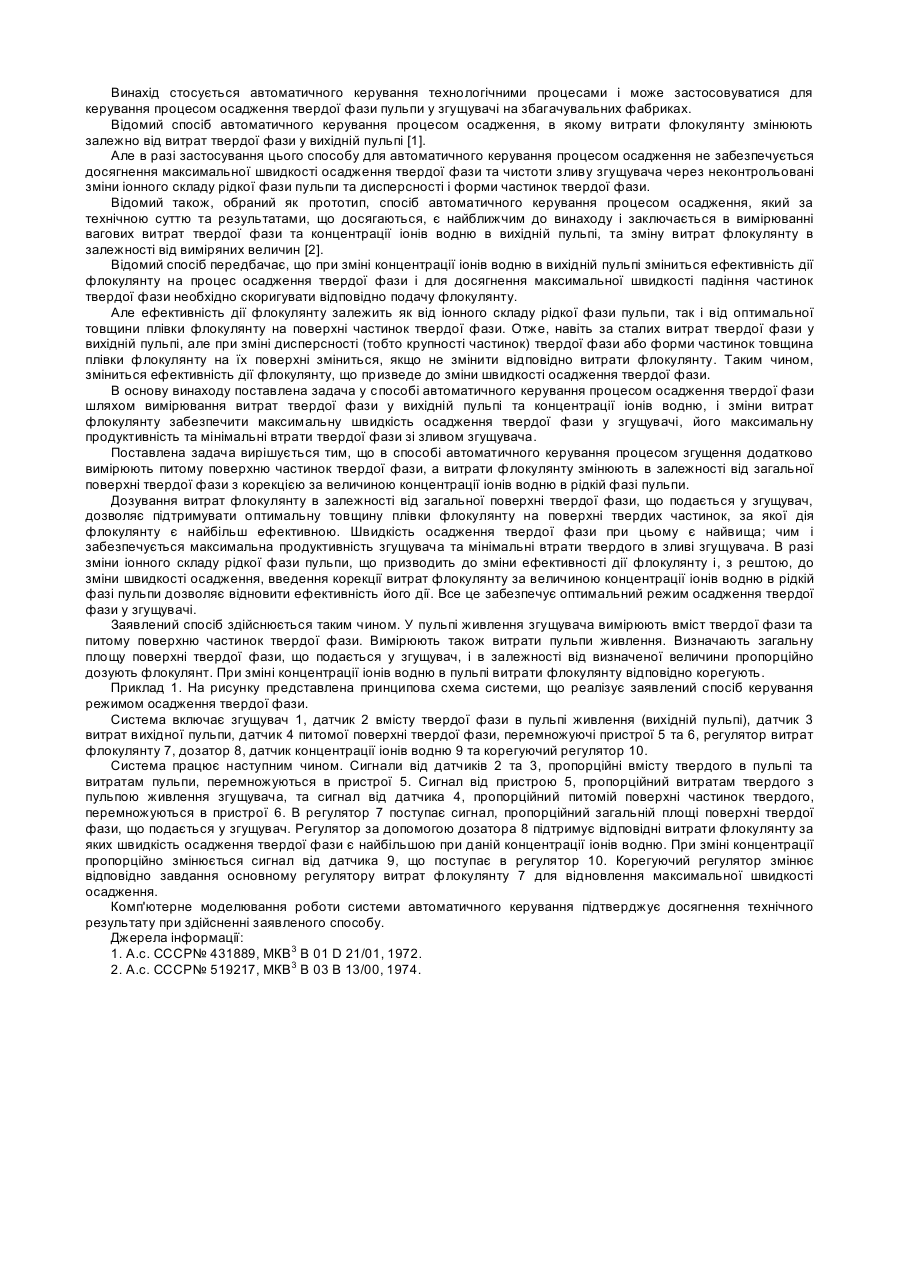
Спосіб автоматичного керування процесом осадження твердої фази шляхом вимірювання вагової витрати твердої фази у вихідній пульпі та концентрації іонів водню та зміни витрати флокулянта, який відрізняється тим, що додатково вимірюють питому поверхню частинок твердої фази, а витрату флокулянта змінюють в залежності від загальної поверхні твердої фази з корекцією за величиною концентрації іонів водню в рідкій фазі пульпи.
Спосіб автоматичного керування процесом згущення пульпи
Номер патенту: 61372
Опубліковано: 17.11.2003
Автори: Шпильовий Леонід Вікторович, Білецький Володимир Степанович
МПК: B01D 21/00
Мітки: керування, пульпи, спосіб, автоматичного, згущення, процесом
Формула / Реферат:
Спосіб автоматичного керування процесом згущення пульпи шляхом контролю вагових витрат твердої фази в згущеній пульпі та її густини, та регулювання співвідношення вагових витрат твердої фази зміною об'ємних витрат згущеної пульпи та корегуванням заданого співвідношення в залежності від густини згущеної пульпи, який відрізняється тим, що контролюють вагові витрати твердої фази в ущільненому осаді, що переміщується скребками ферми до...
Спосіб осадження суспензії
Номер патенту: 23743
Опубліковано: 17.12.2001
Автори: Єременко Борис Валентинович, Сиромятніков Володимир Георгієвич, Куцевол Наталія Володимирівна, Желтоножська Тетяна Борисівна, Мельник Наталія Петрівна, Момот Леся Миколаївна
МПК: B01D 21/01, C02F 1/56
Мітки: спосіб, суспензії, осадження
Формула / Реферат:
1. Спосіб осадження суспензії, що включає обробку неіоногенним флокулянтом та наступний розподіл твердої і рідкої фаз відстоюванням, який відрізняється тим, що як неіоногенний флокулянт використовують неіоногенний внутрішньомолекулярний полікомплекс - прищеплений кополімер поліакріютаміду до полівінілового спирту.2. Спосіб по п. 1, який відрізняється тим, що кількість прищеплених ланцюгів поліакриламіду в прищепленому кополімері...
Спосіб автоматичного керування роботою радіального згущувача
Номер патенту: 65883
Опубліковано: 15.04.2004
Автор: Шпильовий Леонід Вікторович
МПК: B01D 21/00
Мітки: керування, радіального, автоматичного, роботою, спосіб, згущувача
Формула / Реферат:
Спосіб автоматичного керування роботою радіального згущувача, що включає вимірювання навантаження на його ферму, який відрізняється тим, що додатково вимірюється швидкість обертання ферми та визначається висота шару ущільненого осаду, а швидкість обертання ферми змінюють залежно від визначеного значення висоти шару осаду.
Спосіб автоматичного керування процесом вібраційного формування залізобетонних виробів
Номер патенту: 64944
Опубліковано: 15.03.2004
Автори: Сівко Володимир Йосипович, Назаренко Максим Іванович, Корнійчук Борис Валерійович
МПК: B28B 1/08, C04B 32/00
Мітки: процесом, залізобетонних, спосіб, автоматичного, вібраційного, керування, формування, виробів
Формула / Реферат:
Спосіб автоматичного керування процесом вібраційного формування залізобетонних виробів, який полягає в тому, що режим впливу робочого органу на бетонну суміш вибирається із умови забезпечення максимального поглинання виробом енергії, що генерується робочим органом і передається на виріб за допомогою форми, при цьому максимальна кількістьенергії, що поглинається виробом, буде мати місце при режимах вібраційного формування, які...
Попередній патент: Спосіб одержання розчинів ароматичних поліамідів
Наступний патент: Лікарський засіб на основі диклофенаку натрію у формі пластиру
Випадковий патент: Лінійний електродвигун ударної дії