Спосіб автоматичного керування роботою радіального згущувача
Формула / Реферат
Спосіб автоматичного керування роботою радіального згущувача, що включає вимірювання навантаження на його ферму, який відрізняється тим, що додатково вимірюється швидкість обертання ферми та визначається висота шару ущільненого осаду, а швидкість обертання ферми змінюють залежно від визначеного значення висоти шару осаду.
Текст
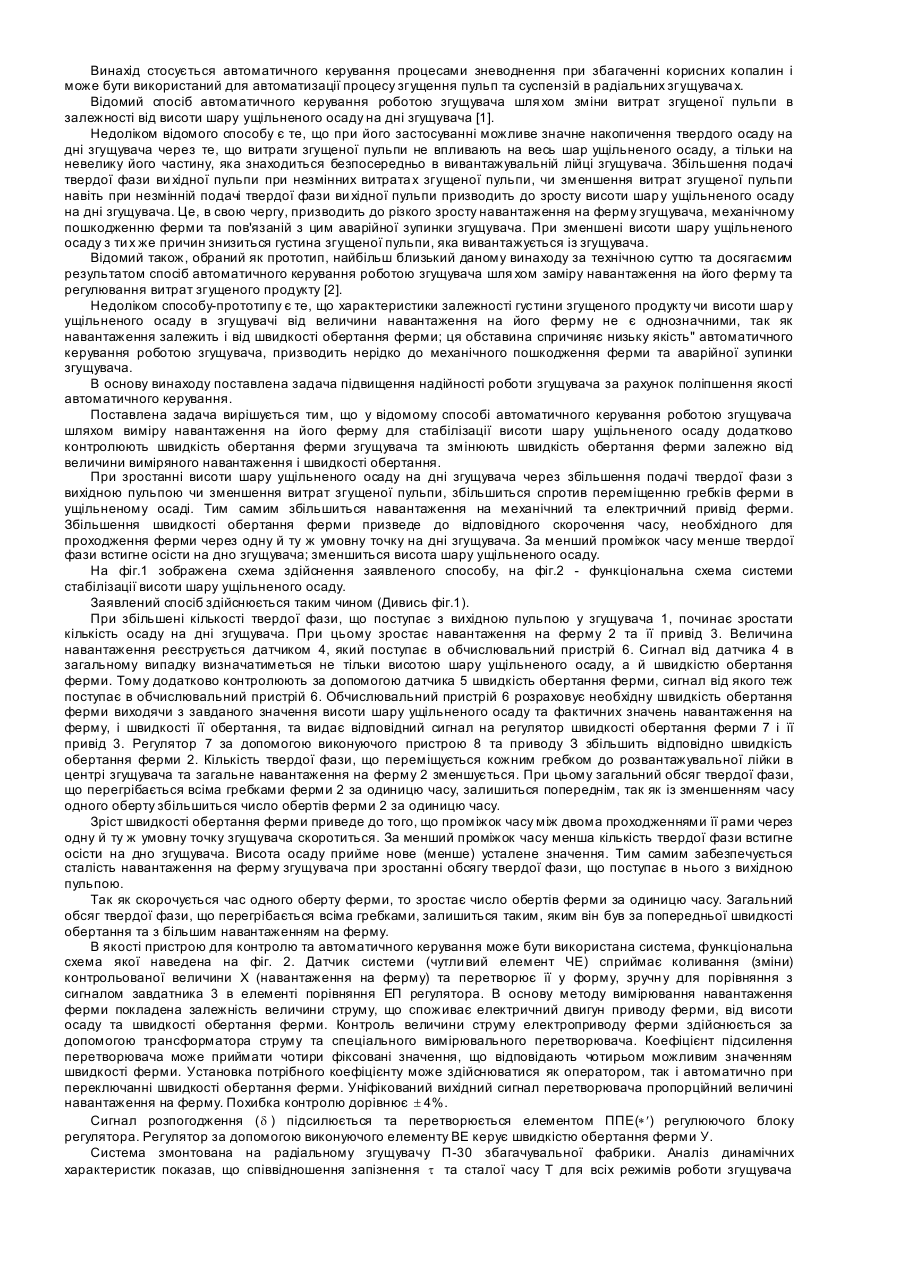
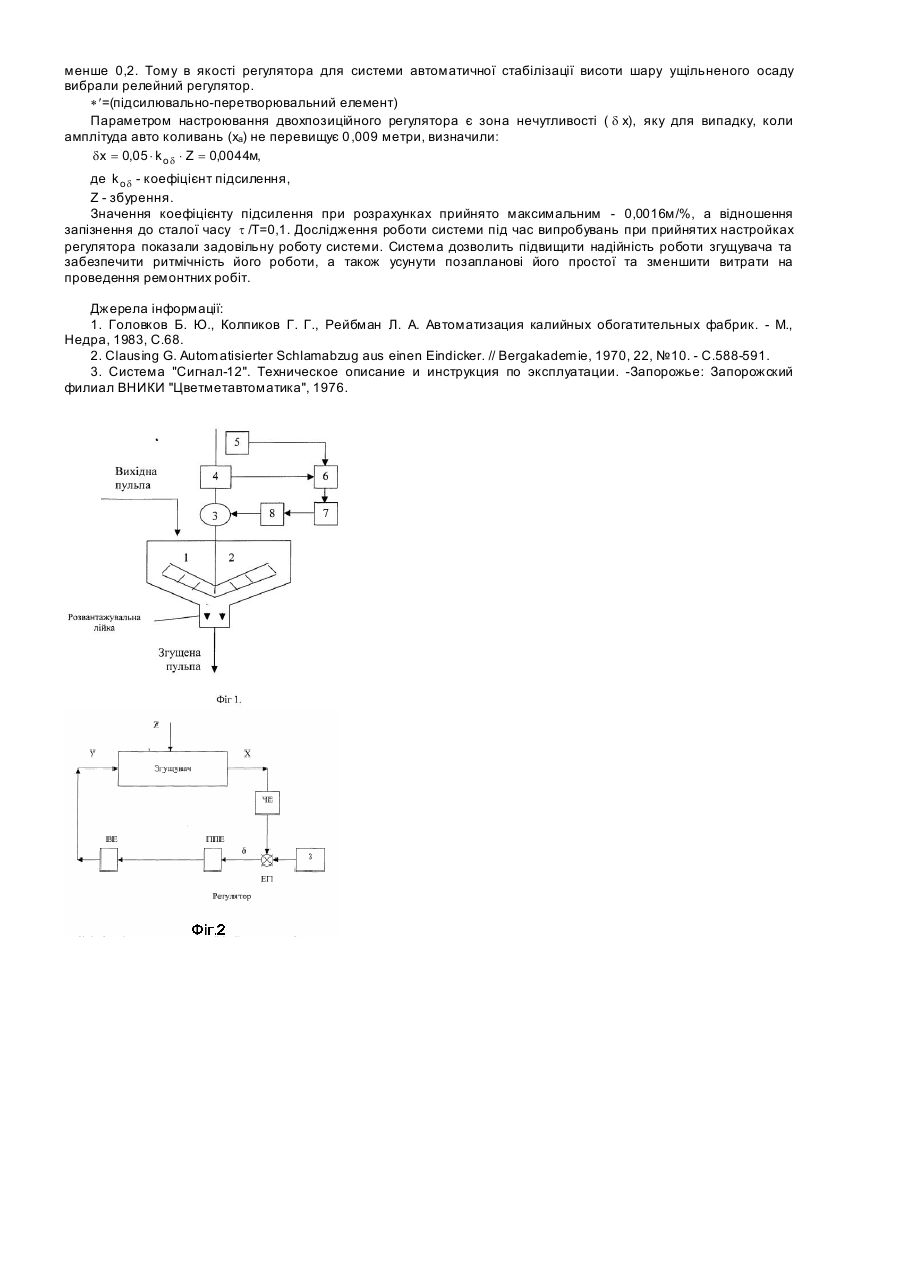
Винахід стосується автоматичного керування процесами зневоднення при збагаченні корисних копалин і може бути використаний для автоматизації процесу згущення пульп та суспензій в радіальних згущувача х. Відомий спосіб автоматичного керування роботою згущувача шля хом зміни витрат згущеної пульпи в залежності від висоти шару ущільненого осаду на дні згущувача [1]. Недоліком відомого способу є те, що при його застосуванні можливе значне накопичення твердого осаду на дні згущувача через те, що витрати згущеної пульпи не впливають на весь шар ущільненого осаду, а тільки на невелику його частину, яка знаходиться безпосередньо в вивантажувальній лійці згущувача. Збільшення подачі твердої фази ви хідної пульпи при незмінних витрата х згущеної пульпи, чи зменшення витрат згущеної пульпи навіть при незмінній подачі твердої фази ви хідної пульпи призводить до зросту висоти шар у ущільненого осаду на дні згущувача. Це, в свою чергу, призводить до різкого зросту навантаження на ферму згущувача, механічному пошкодженню ферми та пов'язаній з цим аварійної зупинки згущувача. При зменшені висоти шару ущільненого осаду з ти х же причин знизиться густина згущеної пульпи, яка вивантажується із згущувача. Відомий також, обраний як прототип, найбільш близький даному винаходу за технічною суттю та досягаємим результатом спосіб автоматичного керування роботою згущувача шля хом заміру навантаження на його ферму та регулювання витрат згущеного продукту [2]. Недоліком способу-прототипу є те, що характеристики залежності густини згущеного продукту чи висоти шар у ущільненого осаду в згущувачі від величини навантаження на його ферму не є однозначними, так як навантаження залежить і від швидкості обертання ферми; ця обставина спричиняє низьку якість" автоматичного керування роботою згущувача, призводить нерідко до механічного пошкодження ферми та аварійної зупинки згущувача. В основу винаходу поставлена задача підвищення надійності роботи згущувача за рахунок поліпшення якості автоматичного керування. Поставлена задача вирішується тим, що у відомому способі автоматичного керування роботою згущувача шляхом виміру навантаження на його ферму для стабілізації висоти шару ущільненого осаду додатково контролюють швидкість обертання ферми згущувача та змінюють швидкість обертання ферми залежно від величини виміряного навантаження і швидкості обертання. При зростанні висоти шару ущільненого осаду на дні згущувача через збільшення подачі твердої фази з вихідною пульпою чи зменшення витрат згущеної пульпи, збільшиться спротив переміщенню гребків ферми в ущільненому осаді. Тим самим збільшиться навантаження на механічний та електричний привід ферми. Збільшення швидкості обертання ферми призведе до відповідного скорочення часу, необхідного для проходження ферми через одну й ту ж умовну точку на дні згущувача. За менший проміжок часу менше твердої фази встигне осісти на дно згущувача; зменшиться висота шару ущільненого осаду. На фіг.1 зображена схема здійснення заявленого способу, на фіг.2 - функціональна схема системи стабілізації висоти шару ущільненого осаду. Заявлений спосіб здійснюється таким чином (Дивись фіг.1). При збільшені кількості твердої фази, що поступає з вихідною пульпою у згущувача 1, починає зростати кількість осаду на дні згущувача. При цьому зростає навантаження на ферму 2 та її привід 3. Величина навантаження реєструється датчиком 4, який поступає в обчислювальний пристрій 6. Сигнал від датчика 4 в загальному випадку визначатиметься не тільки висотою шару ущільненого осаду, а й швидкістю обертання ферми. Тому додатково контролюють за допомогою датчика 5 швидкість обертання ферми, сигнал від якого теж поступає в обчислювальний пристрій 6. Обчислювальний пристрій 6 розраховує необхідну швидкість обертання ферми виходячи з завданого значення висоти шару ущільненого осаду та фактичних значень навантаження на ферму, і швидкості її обертання, та видає відповідний сигнал на регулятор швидкості обертання ферми 7 і її привід 3. Регулятор 7 за допомогою виконуючого пристрою 8 та приводу З збільшить відповідно швидкість обертання ферми 2. Кількість твердої фази, що переміщується кожним гребком до розвантажувальної лійки в центрі згущувача та загальне навантаження на ферму 2 зменшується. При цьому загальний обсяг твердої фази, що перегрібається всіма гребками ферми 2 за одиницю часу, залишиться попереднім, так як із зменшенням часу одного оберту збільшиться число обертів ферми 2 за одиницю часу. Зріст швидкості обертання ферми приведе до того, що проміжок часу між двома проходженнями її рами через одну й ту ж умовну точку згущувача скоротиться. За менший проміжок часу менша кількість твердої фази встигне осісти на дно згущувача. Висота осаду прийме нове (менше) усталене значення. Тим самим забезпечується сталість навантаження на ферму згущувача при зростанні обсягу твердої фази, що поступає в нього з вихідною пульпою. Так як скорочується час одного оберту ферми, то зростає число обертів ферми за одиницю часу. Загальний обсяг твердої фази, що перегрібається всіма гребками, залишиться таким, яким він був за попередньої швидкості обертання та з більшим навантаженням на ферму. В якості пристрою для контролю та автоматичного керування може бути використана система, функціональна схема якої наведена на фіг. 2. Датчик системи (чутли вий елемент ЧЕ) сприймає коливання (зміни) контрольованої величини Х (навантаження на ферму) та перетворює її у форму, зручн у для порівняння з сигналом завдатника 3 в елементі порівняння ЕП регулятора. В основу методу вимірювання навантаження ферми покладена залежність величини струму, що споживає електричний двигун приводу ферми, від висоти осаду та швидкості обертання ферми. Контроль величини струму електроприводу ферми здійснюється за допомогою трансформатора струму та спеціального вимірювального перетворювача. Коефіцієнт підсилення перетворювача може приймати чотири фіксовані значення, що відповідають чотирьом можливим значенням швидкості ферми. Установка потрібного коефіцієнту може здійснюватися як оператором, так і автоматично при переключанні швидкості обертання ферми. Уніфікований вихідний сигнал перетворювача пропорційний величині навантаження на ферму. Похибка контролю дорівнює ± 4%. Сигнал розпогодження (d ) підсилюється та перетворюється елементом ППЕ(*¢) регулюючого блоку регулятора. Регулятор за допомогою виконуючого елементу BE керує швидкістю обертання ферми У. Система змонтована на радіальному згущувачу П-30 збагачувальної фабрики. Аналіз динамічних характеристик показав, що співвідношення запізнення t та сталої часу Т для всіх режимів роботи згущувача менше 0,2. Тому в якості регулятора для системи автоматичної стабілізації висоти шару ущільненого осаду вибрали релейний регулятор. *¢=(підсилювально-перетворювальний елемент) Параметром настроювання двохпозиційного регулятора є зона нечутливості ( d х), яку для випадку, коли амплітуда авто коливань (ха) не перевищує 0 ,009 метри, визначили: dх = 0,05 × k o d × Z = 0,0044м, де k o d - коефіцієнт підсилення, Z - збурення. Значення коефіцієнту підсилення при розрахунках прийнято максимальним - 0,0016м/%, а відношення запізнення до сталої часу t /Т=0,1. Дослідження роботи системи під час випробувань при прийнятих настройках регулятора показали задовільну роботу системи. Система дозволить підвищити надійність роботи згущувача та забезпечити ритмічність його роботи, а також усунути позапланові його простої та зменшити витрати на проведення ремонтних робіт. Джерела інформації: 1. Головков Б. Ю., Колпиков Г. Г., Рейбман Л. А. Автоматизация калийных обогатительных фабрик. - М., Недра, 1983, С.68. 2. Clausing G. Automatisierter Schlamabzug aus einen Eindicker. // Bergakademie, 1970, 22, №10. - С.588-591. 3. Система "Сигнал-12". Техническое описание и инструкция по эксплуатации. -Запорожье: Запорожский филиал ВНИКИ "Цветметавтоматика", 1976.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic control of radial thickener operation
Автори англійськоюShpyliovyi Leonid Viktorovych
Назва патенту російськоюСпособ автоматического управления работой радиального загустителя
Автори російськоюШпилевой Леонид Викторович
МПК / Мітки
МПК: B01D 21/00
Мітки: автоматичного, спосіб, згущувача, керування, роботою, радіального
Код посилання
<a href="https://ua.patents.su/2-65883-sposib-avtomatichnogo-keruvannya-robotoyu-radialnogo-zgushhuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування роботою радіального згущувача</a>
Спосіб автоматичного керування процесом згущення пульпи
Номер патенту: 61372
Опубліковано: 17.11.2003
Автори: Шпильовий Леонід Вікторович, Білецький Володимир Степанович
МПК: B01D 21/00
Мітки: спосіб, процесом, згущення, пульпи, автоматичного, керування
Формула / Реферат:
Спосіб автоматичного керування процесом згущення пульпи шляхом контролю вагових витрат твердої фази в згущеній пульпі та її густини, та регулювання співвідношення вагових витрат твердої фази зміною об'ємних витрат згущеної пульпи та корегуванням заданого співвідношення в залежності від густини згущеної пульпи, який відрізняється тим, що контролюють вагові витрати твердої фази в ущільненому осаді, що переміщується скребками ферми до...
Спосіб керування роботою апарата вакуумної терапії та пристрій для його здійснення
Номер патенту: 43186
Опубліковано: 15.11.2001
Автори: Каплін Генадій Іванович, Володось Микола Леонтіїйович, Пономарьов Юрій Максимович, Молошний Михайло Володимирович, Лоскуткін Віктор Миколайович, Скідан Василь Іванович
МПК: A61M 1/00
Мітки: здійснення, спосіб, апарата, терапії, керування, пристрій, вакуумної, роботою
Формула / Реферат:
1. Спосіб керування роботою апарата вакуумної терапії шляхом періодичної подачі на електродвигун вакуум-помпи апарата розрахункової напруги і відключення її при досягненні фактичного рівня розрідження в апараті, що дорівнює заданому, який відрізняється тим, що подачу напруги на електродвигун здійснюють дискретно, збільшуючи тривалість імпульсу напруги у міру зниження різниці між заданим і фактичним рівнями розрідження пропорційно навантаженню...
Спосіб керування роботою відцентрового сепаратора
Номер патенту: 25959
Опубліковано: 26.02.1999
Автор: Андерс Паллмар
МПК: B04B 1/00
Мітки: спосіб, сепаратора, відцентрового, роботою, керування
Формула / Реферат:
1. Способ управления работой центробежного сепаратора, предусматривающий подачу разделяемой жидкой смеси и барабан, имеющий впускное отверстие дли нее, расположенное центрально выпускное отверстие для отделенной легкой жидкости и периферийное выпускное отверстие для удаления тяжелого вещества и снабженный устройством для открывания и закрывания последнего, введение в барабан при помощи подающего устройства, включаемого средством управления,...
Спосіб автоматичного керування летючими ножицями для різання передніх торців прокату
Номер патенту: 58734
Опубліковано: 15.08.2003
Автори: Хижняк Вячеслав Якович, Носіков Віктор Львович, Бабенко Михайло Антонович, Шеремет Володимир Олександрович, Коротченков Валерій Михайлович
МПК: B23D 25/00, B23D 36/00
Мітки: керування, спосіб, торців, різання, автоматичного, ножицями, летючими, передніх, прокату
Формула / Реферат:
Спосіб автоматичного керування летючими ножицями для різання передніх торців прокату, що включає операції виділення на прокатному стані ділянки синхронізації, виміру швидкості обертання ножів барабанів летючих ножиць, кута їхнього відхилення від лінії різання в момент входу переднього торця прокату в початок ділянки синхронізації, прогнозування часу проходження переднього торця прокату на ділянці синхронізації, визначення величини...
Спосіб автоматичного керування процесом вібраційного формування залізобетонних виробів
Номер патенту: 64944
Опубліковано: 15.03.2004
Автори: Корнійчук Борис Валерійович, Назаренко Максим Іванович, Сівко Володимир Йосипович
МПК: B28B 1/08, C04B 32/00
Мітки: процесом, спосіб, залізобетонних, формування, вібраційного, виробів, керування, автоматичного
Формула / Реферат:
Спосіб автоматичного керування процесом вібраційного формування залізобетонних виробів, який полягає в тому, що режим впливу робочого органу на бетонну суміш вибирається із умови забезпечення максимального поглинання виробом енергії, що генерується робочим органом і передається на виріб за допомогою форми, при цьому максимальна кількістьенергії, що поглинається виробом, буде мати місце при режимах вібраційного формування, які...
Попередній патент: Шолом для захисту від куль
Наступний патент: Магнітодинамічний пристрій для дозування металевих розплавів
Випадковий патент: Пристрій для зменшення аеродинамічного опору транспортних засобів