П’єзоелектричний привід
Номер патенту: 76508
Опубліковано: 15.08.2006
Автори: Петренко Сергій Федорович, Лавріненко В'ячеслав Васильович

Формула / Реферат
1. П'єзоелектричний привід, що містить корпус та два нереверсивних п'єзоелектричних двигуни, механічно з'єднаних між собою таким чином, що ротор першого двигуна з'єднаний зі статором другого двигуна, а ротор другого двигуна з'єднаний з навантаженням, який відрізняється тим, що статор першого двигуна встановлений на корпусі, механічне з'єднання ротора першого двигуна та статора другого виконане з можливістю обертання ротора першого двигуна відносно статора другого двигуна та навпаки, наприклад, за допомогою зубчастих коліс, статор другого двигуна виконаний з можливістю обертання відносно корпусу та свого ротора, а ротор другого двигуна - з можливістю обертання відносно свого статора та корпусу.
2. П'єзоелектричний привід за п. 1, який відрізняється тим, що напрям руху роторів двох нереверсивних двигунів однаковий.
3. П'єзоелектричний привід за п. 1, який відрізняється тим, що напрям руху роторів двох нереверсивних двигунів протилежний.
4. П'єзоелектричний привід за пп. 1-3, який відрізняється тим, що діаметри зубчастих коліс співпадають.
5. П'єзоелектричний привід за пп. 1-3, який відрізняється тим, що діаметри зубчастих коліс не співпадають.
Текст
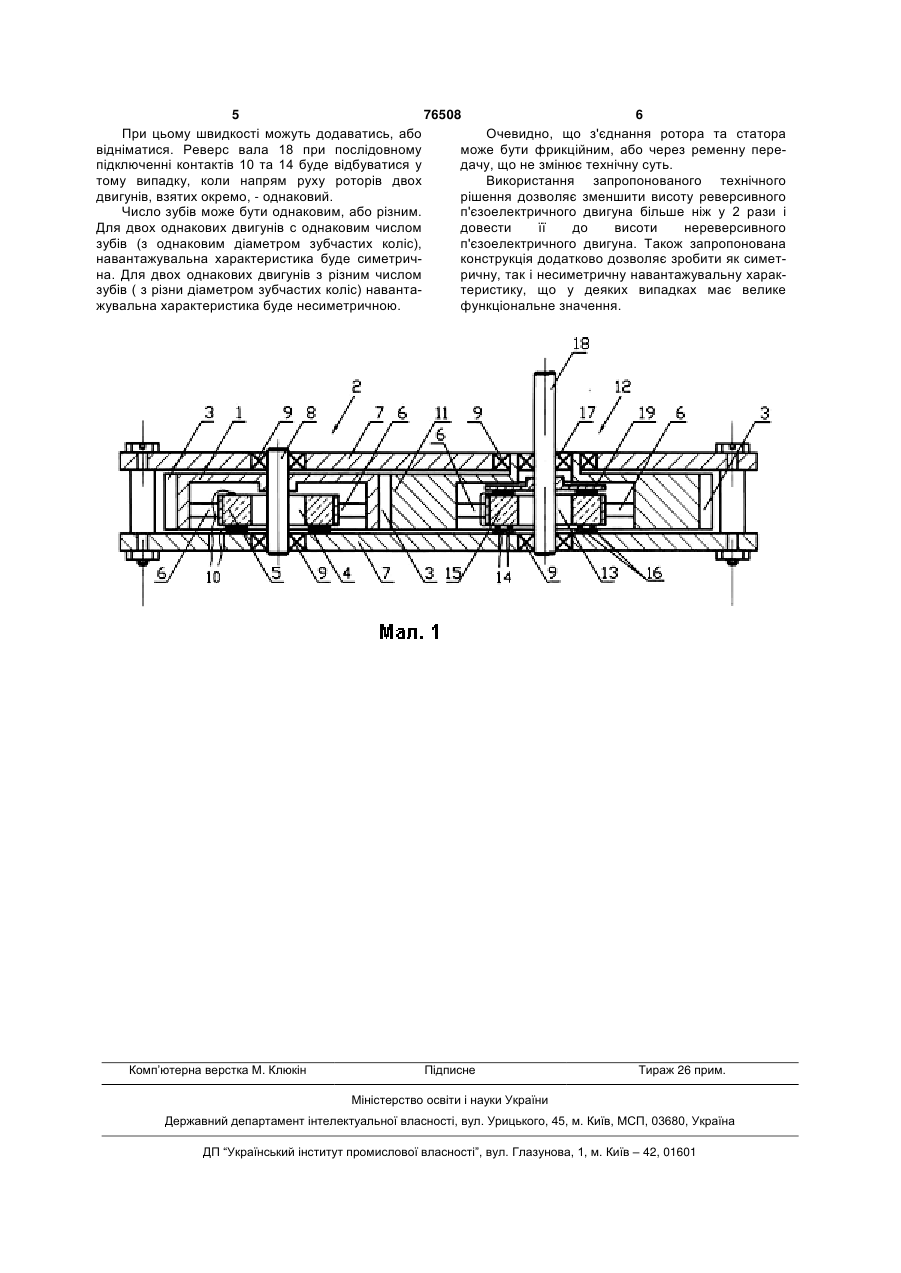
1. П'єзоелектричний привід, що містить корпус та два нереверсивних п'єзоелектричних двигуни, механічно з'єднаних між собою таким чином, що ротор першого двигуна з'єднаний зі статором другого двигуна, а ротор другого двигуна з'єднаний з навантаженням, який відрізняється тим, що ста C2 1 3 76508 4 Але в багатьох конструкціях треба, або бажап'єзоелемента 5 нанесені електроди, до яких но, мати плоский п'єзоелектричний двигун, наприпаяні контактні виводи 10. приклад, у мікророботах, мікроманіпуляторах. До Статор 11 другого п'єзоелектричного двигуна того ж, навантажувальна характеристика не виконаний таким же чином, як і ротор 1 першого обов'язково повинна бути симетричною, наприкп'єзоелектричного двигуна , а ротор 13 другого лад, у двигуні домкрата. двигуна - як статор 4 першого двигуна. Різниця При створенні винаходу вирішувалась задача лише в тому, що контактні виводи 14 з'єднані з побудови плоского реверсивного п'єзоелементом 15 через струмознімач 16. п'єзоелектричного привода. П'єзоелемент 15 встановлений на фланці 19 через Ця задача вирішувалась за рахунок того, що в звукоізольовану прокладку. Статор 11 встановлевідомому п'єзоелектричному приводі, що містить ний у підшипнику 9, який встановлений у корпусі 7. корпус та два нереверсивних п'єзоелектричних Ротор 13 встановлений на валу 18, а вал 18 встадвигуна механічно з'єднаних між собою таким чиновлений з одного боку в корпусі 7 за допомогою ном, що ротор першого двигуна з'єднаний зі стапідшипника 9, та з другого боку в статорі 11 за тором другого двигуна, а ротор другого двигуна допомогою підшипника 17. Таким чином статор 11 з'єднаний з нагрузкою, статор першого двигуна може обертатися відносно корпусу у підшипнику 9, встановлений на корпусі, механічне з'єднання роа ротор 13 може обертатися відносно статора 11 тора першого двигуна та статора другого виконане за допомогою підшипників 17 та відносно корпусу з можливістю обертання ротора першого за допомог підшипника 9. п'єзоелектричного двигуна відносно статора другоРотор першого та статор другого го п'єзоелектричного двигуна, наприклад, за допоп'єзоелектричних двигунів з'єднані між собою за могою зубчастих коліс, статор другого допомогою зубів 3 з однаковим модулем, п'єзоелектричного двигуна виконаний з нарізаних у роторі та статорі. Діаметри зубчастих можливістю обертання відносно корпусу, а ротор коліс можуть бути однаковими, або відрізнятися. другого двигуна с можливістю обертання відносно Робота пристрою відбувається наступним чисвого статора та корпусу. ном. Додатково, напрям руху роторів двох нереверПри підключенні контактів 10 першого сивних двигунів може бути однаковий, або протип'єзоелектричного двигуна до генератора збудлежний, а діаметри зубчастих коліс однакові, або ження з робочою частотою, в кільцевому різні. п'єзоелементі 5 за рахунок зворотнього Сутність запропонованого технічного рішення п'єзоелектричного ефекту виникають механічні пояснюється малюнком 1, де зображено реверрезонансні радіальні коливання. Ці коливання чесивний п'єзоелектричний привід у плоскому рез оболонку передаються в штовхачі 6. За рахувиконанні (1- ротор першого п'єзоелектричного нок взаємодії штовхачів б з внутрішньою двигуна; 2 - перший п'єзоелектричний двигун; 3 циліндричною поверхнею ротора 1 (штовхачі зубчасті елементи; 4 - статор першого встановлені під гострим кутом до внутрішньої п'єзоелектричного двигуна; 5 кільцевий поверхні ротора), відбувається трансформація п'єзоелемент першого двигуна; 6 - штовхачі; 7 радіальних коливань п'єзоелемента 5 у обертання корпус; 8 - вал першого двигуна з запресованим ротора 1. ротором 1,9 - підшипники в корпусі; 10 - контактні Виникаючий при цьому обертальний момент виводи першого статора; 11 - статор другого першого двигуна передається через зубчасту пеп'єзоелектричного двигуна; 12 другий редачу в статор 11 другого двигуна і далі через п'єзоелектричний двигун; 13 - ротор другого фрикційний контакт штовхачів 6 ротора 13 в вал п'єзоелектричного двигуна; 14 - контактні виводи 18 другого двигуна та навантаження. При цьому ротора другого п'єзоелектричного двигуна; 15 ротор 11 обертається відносно корпусу 7, а ротор кільцевий п'єзоелемент другого двигуна; 16 13 разом з валом 18 обертається разом зі статострумознімач ротора другого п'єзоелектричного ром. двигуна; 17 - підшипник в статорі другого При підключенні контактів 14 другого п'єзоелектричного двигуна; 18 - вал другого п'єзоелектричного двигуна до генератора збудп'єзоелектричного двигуна на якому встановлений ження з робочою частотою, потенціали через ротор 13; 19 - фланець, запресований на валу 18) струмознімач 16 надходять на п'єзоелемент 15. П'єзоелектричний привід містить два нереверТаким чином, при збудженні п'єзоелемнта 15 за сивних п'єзоелектричних двигуна 2 та 12. рахунок зворотнього п'єзоелектричного ефекту в Ротор 1 першого двигуна виконаний, наприкньому виникають механічні резонансні радіальні лад, у вигляді стального стакану, на зовнішній коливання. Ці коливання передаються через обоциліндричній поверхні якого нарізані зуби 3. Ротор лонку в штовхачі 6 другого двигуна. В цьому ви1 охоплює статор 4, який виконано у вигляді падку статор 11 загальмований через зубчасту кільцевого п'єзоелементу 5, на зовнішній передачу фрикційне загальмованим ротором 1 циліндричній поверхні якого встановлена металепершого двигуна (за рахунок фрикційного контакту ва оболонка з пружно зогнутими пластинами штовхачів 6 статора 4). Обертальний момент при штовхачами 6 і які фрикційне взаємодіють з ротоцьому формується шляхом відштовхування ром 1 по внутрішній циліндричній поверхні. штовхачів 6 ротора 13 від статора 11 другого П'єзоелемент 5 встановлений на корпусі 7 через п'єзоелектричного двигуна. Таким чином, при цьозвукоізольовану прокладку. Вал 8 ротора 1 встаму статор 11 нерухомий, а ротор 13 обертається новлений у підшипниках 9. Таким чином вал відносно статора 11 та корпусу 7 разом з валом обертається разом з ротором. На торцеві поверхні 18. 5 76508 6 При цьому швидкості можуть додаватись, або Очевидно, що з'єднання ротора та статора відніматися. Реверс вала 18 при послідовному може бути фрикційним, або через ременну перепідключенні контактів 10 та 14 буде відбуватися у дачу, що не змінює технічну суть. тому випадку, коли напрям руху роторів двох Використання запропонованого технічного двигунів, взятих окремо, - однаковий. рішення дозволяє зменшити висоту реверсивного Число зубів може бути однаковим, або різним. п'єзоелектричного двигуна більше ніж у 2 рази і Для двох однакових двигунів с однаковим числом довести її до висоти нереверсивного зубів (з однаковим діаметром зубчастих коліс), п'єзоелектричного двигуна. Також запропонована навантажувальна характеристика буде симетричконструкція додатково дозволяє зробити як симетна. Для двох однакових двигунів з різним числом ричну, так і несиметричну навантажувальну харакзубів ( з різни діаметром зубчастих коліс) навантатеристику, що у деяких випадках має велике жувальна характеристика буде несиметричною. функціональне значення. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPiezoelectric actuator
Автори англійськоюPetrenko Serhii Fedorovych
Назва патенту російськоюПьезоэлектрический привод
Автори російськоюПетренко Сергей Федорович
МПК / Мітки
МПК: H02N 2/00, H01L 41/09
Мітки: п'єзоелектричний, привід
Код посилання
<a href="https://ua.patents.su/3-76508-pehzoelektrichnijj-privid.html" target="_blank" rel="follow" title="База патентів України">П’єзоелектричний привід</a>
Привід транспортного засобу
Номер патенту: 73620
Опубліковано: 15.08.2005
Автори: Пабат Анастасія Анатоліївна, Пабат Анатолій Іванович
МПК: H02K 7/00
Мітки: привід, транспортного, засобу
Формула / Реферат:
Привід транспортного засобу, що містить електричний привідний двигун, з'єднаний з механізмом руху за допомогою двох редукторів, які мають швидкохідні, тихохідні вали і маховик, який відрізняється тим, що електричний привідний двигун містить ротор та обертовий статор-індуктор, обладнаний маховиком швидкохідний вал одного редуктора з'єднаний з ротором привідного двигуна, швидкохідний вал іншого редуктора з'єднаний з обертовим...
П’єзоелектричний двигун
Номер патенту: 76220
Опубліковано: 17.07.2006
Автори: Лавріненко В'ячеслав Васильович, Петренко Сергій Федорович
МПК: H01L 41/09, H02N 2/00
Мітки: п'єзоелектричний, двигун
Формула / Реферат:
1. П'єзоелектричний двигун, що містить встановлені в корпусі статор та ротор з підключеним до нього навантаженням, що фрикційно взаємодіють через штовхачі, який відрізняється тим, що ротор встановлено з можливістю осьового лінійного переміщення, а статор встановлено в корпусі з можливістю обертання та осьового переміщення по гвинтовій лінії, наприклад, через з'єднання гвинт-гайка, до упору ротора в корпус.2. П'єзоелектричний двигун за...
Привід круглов’язальної машини
Номер патенту: 62212
Опубліковано: 15.12.2003
Автори: Ловейкіна Світлана Олексіївна, Марченко Анатолій Іванович, Піпа Борис Федорович
МПК: D04B 15/94
Мітки: привід, круглов'язальної, машини
Формула / Реферат:
Привід круглов'язальної машини, що містить електродвигун, який включає ротор і статор, встановлений з можливістю повороту навколо своєї осі, клинопасову передачу, ведучий шків якої жорстко встановлений на валу електродвигуна, кінематично з'єднану з зубчастими передачами, які в свою чергу кінематично з'єднані між собою та з голковим циліндром механізму в'язання і механізмом товароприйому, та засіб автоматичного натягу пасів клинопасової...
Ротаційний привід
Номер патенту: 62054
Опубліковано: 15.12.2003
Автори: Шлахтер Ілля Семенович, Дячук Володимир Володимирович
МПК: E21B 4/00
Мітки: ротаційний, привід
Формула / Реферат:
Ротаційний привід, що містить кільцеподібний профільований статор, усередині якого концентрично розташований тороподібний ротор, у радіальних пазах якого встановлені рухомі лопаті, що в сукупності утворюють багатолопатеву турбінку з нагнітальними каналами і каналами зниженого тиску, який відрізняється тим, що на внутрішній циліндричній поверхні статора розміщені виступи з плавним профілем піднімальної площини і співвісно встановлений в...
Привід круглов’язальної машини
Номер патенту: 54288
Опубліковано: 17.02.2003
Автори: Піпа Борис Федорович, Ловейкіна Світлана Олексіївна
МПК: D04B 15/94
Мітки: круглов'язальної, привід, машини
Формула / Реферат:
Привід круглов'язальної машини, що містить електродвигун, який включає ротор і статор, клинопасову передачу, ведучий шків якої жорстко встановлений на валу електродвигуна, та зубчасті передачі, кінематично з'єднані між собою та з голковим циліндром механізму в'язання і механізмом товароприйому, який відрізняється тим, що додатково оснащений гальмом, встановленим на статорі електродвигуна, причому статор встановлений з можливістю обертання...
Попередній патент: Спосіб виробництва дієтичних м’ясних січених напівфабрикатів
Наступний патент: Пристрій для заміру та запису сил, що діють на задню поверхню інструменту
Випадковий патент: Спосіб розміщення реклами