Спосіб визначення положення точок на земній поверхні
Формула / Реферат
Спосіб визначення положення точок на земній поверхні, який полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів, і визначають оптимально необхідні сесії вимірів, та розташовують одночасно не менше трьох систем GPS, послідовно у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні, який відрізняється тим, що перед розташуванням у точках систем GPS визначають з топографічної карти витрати на переміщення між точками, на яких виконують виміри, визначають скорочений ряд послідовності виконуваних сесій вимірів з оптимально необхідних сесій за рахунок їх додаткової інформативності, якому відповідає мінімум витрат на переміщення систем GPS, і розташовують їх у точках мережі за визначеною схемою.
Текст
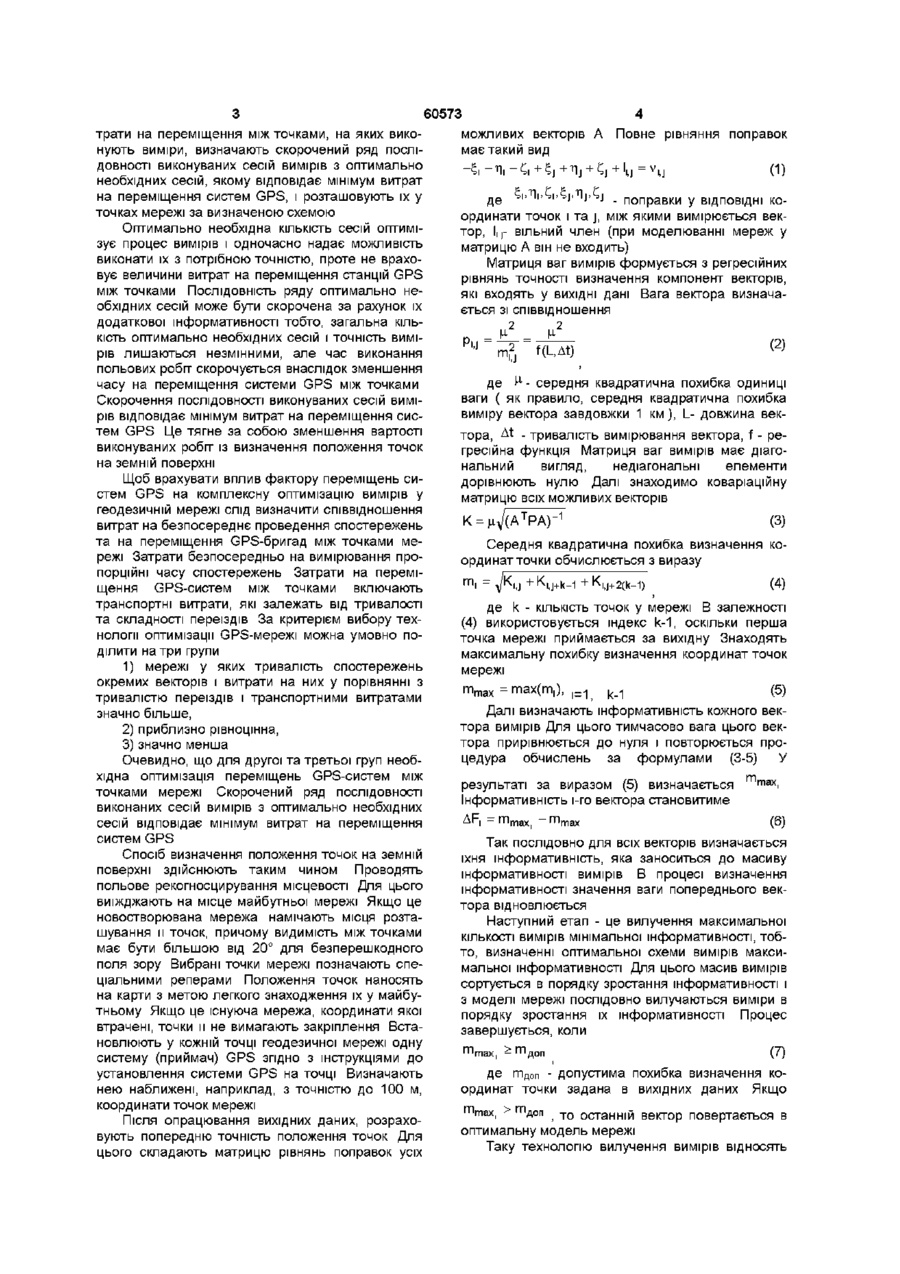
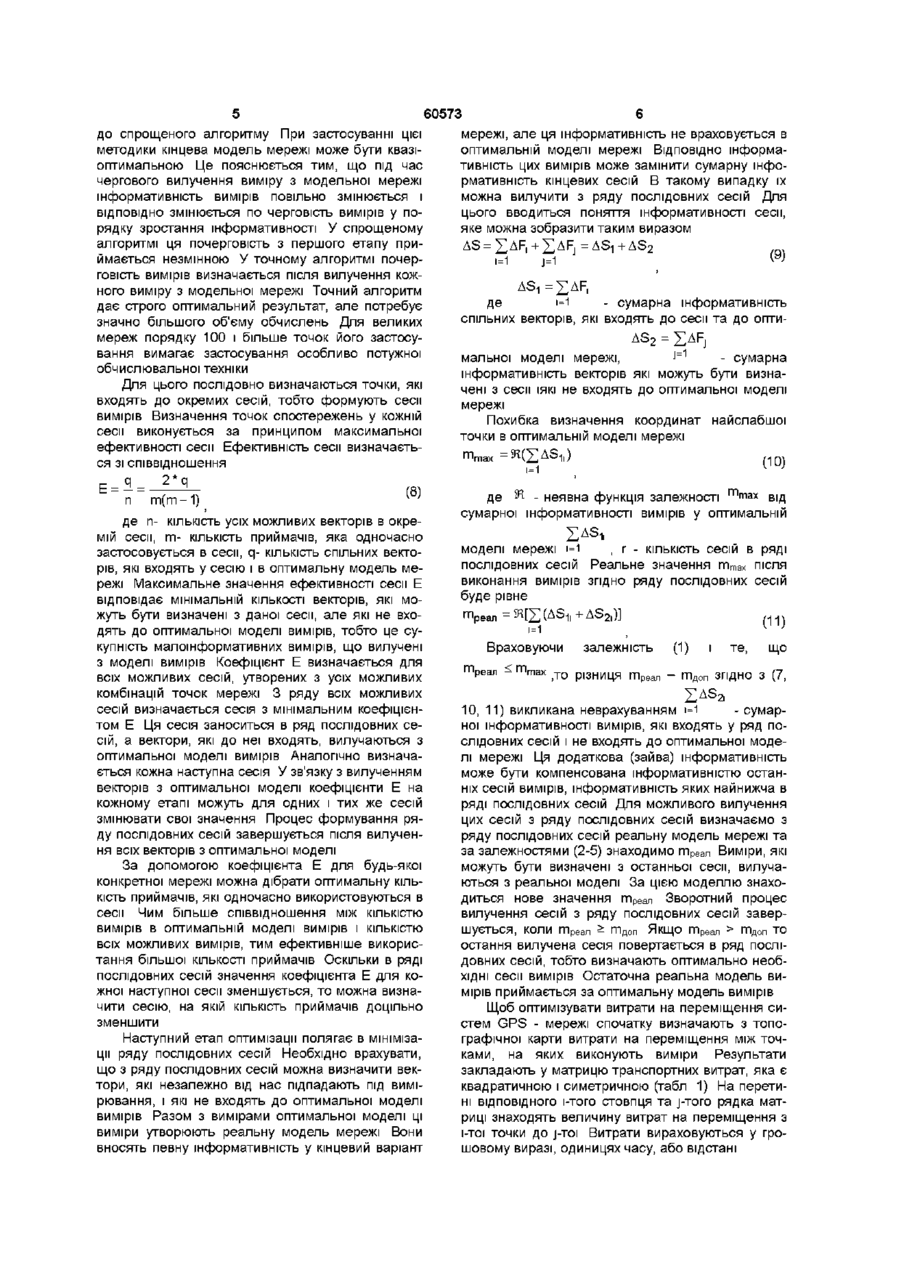
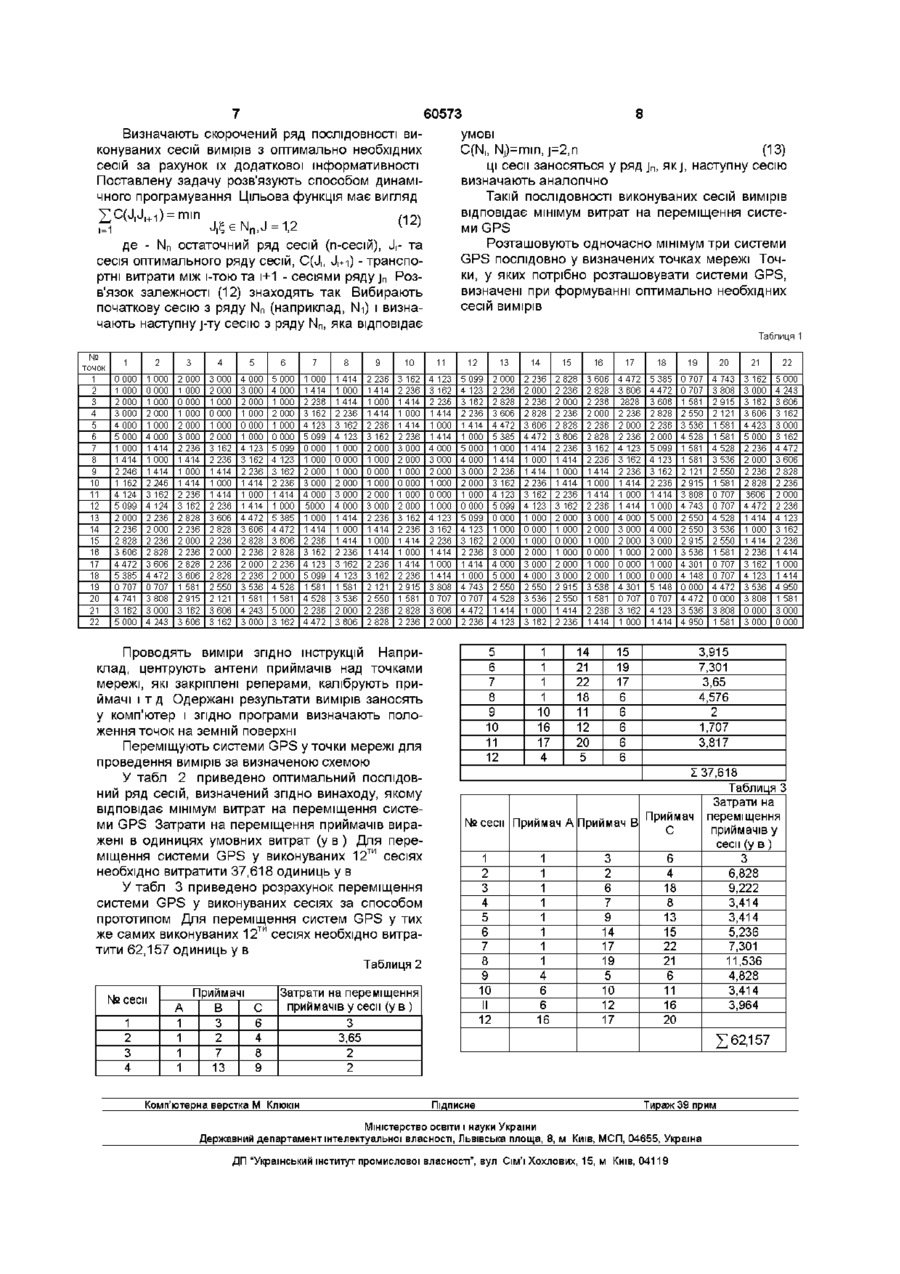
Спосіб визначення положення точок на земній поверхні, який полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів, і визначають оптимально необхідні сесії вимірів, та розташовують одночасно не менше трьох систем GPS, послідовно у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні, який відрізняється тим, що перед розташуванням у точках систем GPS визначають з топографічної карти витрати на переміщення між точками, на яких виконують виміри, визначають скорочений ряд ПОСЛІДОВНОСТІ виконуваних сесій вимірів з оптимально необхідних сесій за рахунок їх додаткової інформативності, якому відповідає мінімум витрат на переміщення систем GPS, і розташовують їх уточках мережі за визначеною схемою Винахід відноситься до геодезичних вимірів, а, конкретно, до способів визначення положення точок на земній поверхні Відомий спосіб визначення положення точок на земній поверхні полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів і визначають оптимально необхідні сесії вимірів, розташовують одночасно не менше трьох систем GPS у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні (Спосіб визначення положення точок на земній поверхні Деклараційний патент 42431 Україна, МПК G01C5/00/ К Р Третяк (Україна) - №2001021169, заявлено 19 02 2001, публ 15 10 2001 бюл №9, 5ст) оптимізувати вимірювання з тією ж точністю але з меншими витратами В основу винаходу поставлене завдання вдосконалити спосіб визначення положення точок на земній поверхні, в якому визначення скороченого ряду ПОСЛІДОВНОСТІ виконуваних сесій вимірів з оптимально необхідних сесій за рахунок їх додаткової інформативності дало б можливість мінімізувати витрати на переміщення систем GPS та зменшити вартість робіт із визначення положення точок на земній поверхні Поставлене завдання вирішують тим, що у способі визначення положення точок на земній поверхні, який полягає у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, встановлюють у кожній з них одну систему GPS, визначають нею наближені координати точок мережі, розраховують попередньо точність положення точок, визначають інформативність кожного з векторів вимірів, а також оптимальну схему вимірів максимальної інформативності, формують сесії вимірів і визначають оптимально необхідні сесії вимірів, розташовують одночасно не менше трьох систем GPS у визначених точках геодезичної мережі, проводять виміри і визначають положення точок на земній поверхні, згідно з винаходом після визначення оптимально необхідних сесій вимірів додатково визначають з топографічної карти ви Але тривалість польових робіт, і ВІДПОВІДНО, їхня вартість залежить від тривалості власне спостережень і витрат часу та ресурсів на переїзди між точками спостережень, тобто, на переміщення приладів з точки на точку Відсутність оптимізацм переміщень систем GPS між точками мережі у згаданому способі, не дає можливості комплексно СО 1^ Ю О (О 60573 можливих векторів А Повне рівняння поправок трати на переміщення між точками, на яких викомає такий вид нують виміри, визначають скорочений ряд ПОСЛІДОВНОСТІ виконуваних сесій вимірів з оптимально -£, -ті, - £ , + ^ +ilj + Cj +l|,j =V|iJ (1) необхідних сесій, якому відповідає мінімум витрат (і ті С £ ті С на переміщення систем GPS, і розташовують їх у J J J де •* •* * - поправки у ВІДПОВІДНІ коточках мережі за визначеною схемою ординати точок і та j , між якими вимірюється векОптимально необхідна КІЛЬКІСТЬ сесій оптимітор, І,,- вільний член (при моделюванні мереж у зує процес вимірів і одночасно надає можливість матрицю А він не входить) виконати їх з потрібною точністю, проте не врахоМатриця ваг вимірів формується з регресійних вує величини витрат на переміщення станцій GPS рівнянь точності визначення компонент векторів, між точками ПОСЛІДОВНІСТЬ ряду оптимально неякі входять у ВИХІДНІ дані Вага вектора визначаобхідних сесій може бути скорочена за рахунок їх ється зі співвідношення додаткової інформативності тобто, загальна КІЛЬ2 2 КІСТЬ оптимально необхідних сесій і точність вимі(2) рів лишаються незмінними, але час виконання f(L,At) т, польових робіт скорочується внаслідок зменшення часу на переміщення системи GPS між точками де М-- середня квадратична похибка одиниці Скорочення ПОСЛІДОВНОСТІ виконуваних сесій виміваги ( як правило, середня квадратична похибка рів відповідає мінімум витрат на переміщення сисвиміру вектора завдовжки 1 км), L- довжина вектем GPS Це тягне за собою зменшення вартості тора, ^ - тривалість вимірювання вектора, f - ревиконуваних робіт із визначення положення точок гресійна функція Матриця ваг вимірів має діагона земній поверхні нальний вигляд, недіагональні елементи Щоб врахувати вплив фактору переміщень сидорівнюють нулю Далі знаходимо коваріаційну стем GPS на комплексну оптимізацію вимірів у матрицю всіх можливих векторів геодезичній мережі слід визначити співвідношення А)- 1 (3) витрат на безпосереднє проведення спостережень та на переміщення GPS-бригад між точками меСередня квадратична похибка визначення корежі Затрати безпосередньо на вимірювання проординат точки обчислюється з виразу порційні часу спостережень Затрати на перемі+ K m (4) щення GPS-систем між точками включають i ~ i,J+k-1 транспортні витрати, які залежать від тривалості де k - КІЛЬКІСТЬ точок у мережі В залежності та складності переїздів За критерієм вибору тех(4) використовується індекс к-1, ОСКІЛЬКИ перша нологи оптимізацм GPS-мережі можна умовно поточка мережі приймається за вихідну Знаходять ділити натри групи максимальну похибку визначення координат точок 1) мережі у яких тривалість спостережень мережі окремих векторів і витрати на них у порівнянні з =max(m l ), | = (5) m тривалістю переїздів і транспортними витратами Далі визначають інформативність кожного векзначно більше, тора вимірів Для цього тимчасово вага цього век2) приблизно рівноцінна, тора прирівнюється до нуля і повторюється про3) значно менша цедура обчислень за формулами (3-5) У Очевидно, що для другої та третьої груп необхідна оптимізація переміщень GPS-систем між тах результаті за виразом (5) визначається і точками мережі Скорочений ряд ПОСЛІДОВНОСТІ Інформативність і-го вектора становитиме виконаних сесій вимірів з оптимально необхідних AF, = m r -mr сесій відповідає мінімум витрат на переміщення (6) систем GPS Так послідовно для всіх векторів визначається Спосіб визначення положення точок на земній їхня інформативність, яка заноситься до масиву поверхні здійснюють таким чином Проводять інформативності вимірів В процесі визначення польове рекогносцирування місцевості Для цього інформативності значення ваги попереднього веквиїжджають на місце майбутньої мережі Якщо це тора відновлюється новостворювана мережа намічають місця розтаНаступний етап - це вилучення максимальної шування и точок, причому видимість між точками КІЛЬКОСТІ вимірів мінімальної інформативності, тобмає бути більшою від 20° для безперешкодного то, визначенні оптимальної схеми вимірів максиполя зору Вибрані точки мережі позначають спемальної інформативності Для цього масив вимірів ціальними реперами Положення точок наносять сортується в порядку зростання інформативності і на карти з метою легкого знаходження їх у майбуз моделі мережі послідовно вилучаються виміри в тньому Якщо це існуюча мережа, координати якої порядку зростання їх інформативності Процес втрачені, точки и не вимагають закріплення Встазавершується, коли новлюють у кожній точці геодезичної мережі одну mmaX| ^ т д о п (7) систему (приймач) GPS згідно з інструкціями до установлення системи GPS на точці Визначають де гпдоп - допустима похибка визначення конею наближені, наприклад, з точністю до 100 м, ординат точки задана в вихідних даних Якщо координати точок мережі max, > доп _ т о останній вектор повертається в Після опрацювання вихідних даних, розрахооптимальну модель мережі вують попередню точність положення точок Для Таку технологію вилучення вимірів відносять цього складають матрицю рівнянь поправок усіх 60573 до спрощеного алгоритму При застосуванні цієї мережі, але ця інформативність не враховується в методики кінцева модель мережі може бути квазіоптимальній моделі мережі ВІДПОВІДНО інформаоптимальною Це пояснюється тим, що під час тивність цих вимірів може замінити сумарну інфочергового вилучення виміру з модельної мережі рмативність кінцевих сесій В такому випадку їх інформативність вимірів повільно змінюється і можна вилучити з ряду послідовних сесій Для ВІДПОВІДНО змінюється по черговість вимірів у поцього вводиться поняття інформативності сесії, рядку зростання інформативності У спрощеному яке можна зобразити таким виразом алгоритмі ця почерговість з першого етапу приймається незмінною У точному алгоритмі почер(9) говість вимірів визначається після вилучення кожного виміру з модельної мережі Точний алгоритм дає строго оптимальний результат, але потребує де і=і - сумарна інформативність значно більшого об'єму обчислень Для великих спільних векторів, які входять до сесії та до оптимереж порядку 100 і більше точок його застосування вимагає застосування особливо потужної мальної моделі мережі, - сумарна обчислювальної техніки інформативність векторів які можуть бути визнаДля цього послідовно визначаються точки, які чені з сесії ІЯКІ не входять до оптимальної моделі входять до окремих сесій, тобто формують сесії мережі вимірів Визначення точок спостережень у кожній Похибка визначення координат найслабшої сесії виконується за принципом максимальної точки в оптимальній моделі мережі ефективності сесії Ефективність сесії визначаєтьm =5R(yAS-|) ся зі співвідношення J=1 г- q 2*q Е =—= — f 81 v n m(m-1) ' де п- КІЛЬКІСТЬ усіх можливих векторів в окремій сесії, т - КІЛЬКІСТЬ приймачів, яка одночасно застосовується в сесії, q- КІЛЬКІСТЬ СПІЛЬНИХ векто рів, які входять у сесію і в оптимальну модель мережі Максимальне значення ефективності сеем Е відповідає мінімальній КІЛЬКОСТІ векторів, які можуть бути визначені з даної сесії, але які не входять до оптимальної моделі вимірів, тобто це сукупність малоінформативних вимірів, що вилучені з моделі вимірів Коефіцієнт Е визначається для всіх можливих сесій, утворених з усіх можливих комбінацій точок мережі 3 ряду всіх можливих сесій визначається сесія з мінімальним коефіцієнтом Е Ця сесія заноситься в ряд послідовних сесій, а вектори, які до неї входять, вилучаються з оптимальної моделі вимірів Аналогічно визначається кожна наступна сесія У зв'язку з вилученням векторів з оптимальної моделі коефіцієнти Е на кожному етапі можуть для одних і тих же сесій змінювати свої значення Процес формування ряду послідовних сесій завершується після вилучення всіх векторів з оптимальної моделі За допомогою коефіцієнта Е для будь-якої конкретної мережі можна дібрати оптимальну КІЛЬКІСТЬ приймачів, які одночасно використовуються в сесії Чим більше співвідношення між КІЛЬКІСТЮ вимірів в оптимальній моделі вимірів і КІЛЬКІСТЮ ВСІХ можливих вимірів, тим ефективніше використання більшої КІЛЬКОСТІ приймачів Оскільки в ряді послідовних сесій значення коефіцієнта Е для кожної наступної сесії зменшується, то можна визначити сесію, на якій КІЛЬКІСТЬ приймачів доцільно зменшити Наступний етап оптимізацм полягає в мінімізації ряду послідовних сесій Необхідно врахувати, що з ряду послідовних сесій можна визначити вектори, які незалежно від нас підпадають під вимірювання, і які не входять до оптимальної моделі вимірів Разом з вимірами оптимальної моделі ці виміри утворюють реальну модель мережі Вони вносять певну інформативність у кінцевий варіант 1=1 ' ' m де 5 . неявна функція залежності max В|д R сумарної інформативності вимірів у оптимальній ZAS, моделі мережі 1 1 = , г - КІЛЬКІСТЬ сесій в ряді послідовних сесій Реальне значення т т а х після виконання вимірів згідно ряду послідовних сесій буде рівне _«»г^,*е Враховуючи т т реал ^ т а х т о , ло м ^ залежність (1) і те, що ГПреал - ГПдоп ЗГІДНО 3 (7, 10, 11) викликана неврахуванням і=і - сумарної інформативності вимірів, які входять у ряд послідовних сесій і не входять до оптимальної моделі мережі Ця додаткова (зайва) інформативність може бути компенсована інформативністю останніх сесій вимірів, інформативність яких найнижча в ряді послідовних сесій Для можливого вилучення цих сесій з ряду послідовних сесій визначаємо з ряду послідовних сесій реальну модель мережі та за залежностями (2-5) знаходимо треал Виміри, які можуть бути визначені з останньої сесії, вилучаються з реальної моделі За цією моделлю знаходиться нове значення треал Зворотний процес вилучення сесій з ряду послідовних сесій завершується, коли треал ^ тдоп Якщо треал > т д о п то остання вилучена сесія повертається в ряд послідовних сесій, тобто визначають оптимально необхідні сесії вимірів Остаточна реальна модель вимірів приймається за оптимальну модель вимірів Щоб оптимізувати витрати на переміщення систем GPS - мережі спочатку визначають з топографічної карти витрати на переміщення між точками, на яких виконують виміри Результати закладають у матрицю транспортних витрат, яка є квадратичною і симетричною (табл 1) На перетині ВІДПОВІДНОГО і-того стовпця та j-того рядка матриці знаходять величину витрат на переміщення з і-тої точки до J-TOI Витрати вираховуються у грошовому виразі, одиницях часу, або відстані 8 60573 Визначають скорочений ряд ПОСЛІДОВНОСТІ виконуваних сесій вимірів з оптимально необхідних сесій за рахунок їх додаткової інформативності Поставлену задачу розв'язують способом динамічного програмування Цільова функція має вигляд умові C(N,, N,)=min,j=2,n (13) ці сесії заносяться у ряд j n , я к ] , наступну сесію визначають аналогічно Такій ПОСЛІДОВНОСТІ виконуваних сесій вимірів відповідає мінімум витрат на переміщення системи GPS Розташовують одночасно мінімум три системи GPS послідовно у визначених точках мережі Точки, у яких потрібно розташовувати системи GPS, визначені при формуванні оптимально необхідних сесій вимірів У CfJ.J., П = mm + 1 h " J ^ N J 12 де - N n остаточний ряд сесій (n-сесій), J,- та сесія оптимального ряду сесій, C(J,, J,+i) -транспортні витрати між і-тою та і+1 - сесіями р я д у ^ Розв'язок залежності (12) знаходять так Вибирають початкову сесію з ряду N n (наприклад, Ni) і визначають наступну j-ту сесію з ряду N n , яка відповідає Таблиця 1 № точок 1 2 3 4 5 6 7 8 9 10 1 1 12 13 14 15 16 17 18 19 20 21 22 1 2 3 4 5 6 7 8 9 10 1 1 12 13 14 15 16 17 18 19 20 21 22 0 000 1 000 2 000 3 000 4 000 5 000 1 000 1 414 2 246 1 162 4 124 5 099 2 000 2 236 2 828 3 606 4 472 5 385 0 707 4 741 3 162 5 000 1 000 0 000 1 000 2 000 1 000 4 000 1 414 1 000 1 414 2 246 3 162 4 124 2 236 2 000 2 236 2 828 3 606 4 472 0 707 3 808 3 000 4 243 2 000 1 000 0 000 1 000 2 000 3 000 2 236 1 414 1 000 1 414 2 236 3 162 2 828 2 236 2 000 2 236 2 828 3 606 1 581 2 915 3 162 3 606 3 000 2 000 1 000 0 000 1 000 2 000 3 162 2 236 1 414 1 000 1 414 2 236 3 606 2 828 2 236 2 000 2 236 2 828 2 550 2 121 3 606 3 162 4 000 3 000 2 000 1 000 0 000 1 000 4 123 3 162 2 236 1 414 1 000 1 414 4 472 3 606 2 828 2 236 2 000 2 236 3 536 1 581 4 243 3 000 5 000 4 000 1 000 2 000 1 000 0 000 5 099 4 123 3 162 2 236 1 414 1 000 5 385 4 472 3 606 2 828 2 236 2 000 4 528 1 581 5 000 3 162 1 000 1 414 2 236 3 162 4 123 5 099 0 000 1 000 2 000 3 000 4 000 5000 1 000 1 414 2 236 3 162 4 123 5 099 1 581 4 528 2 236 4 472 1 414 1 000 1 414 2 236 3 162 4 123 1 000 0 000 1 000 2 000 3 000 4 000 1 414 1 000 1 414 2 236 3 162 4 123 1 581 3 536 2 000 3 606 2 236 1 414 1 000 1 414 2 236 3 162 2 000 1 000 0 000 1 000 2 000 3 000 2 236 1 414 1 000 1 414 2 236 3 162 2 121 2 550 2 236 2 828 3 162 2 236 1 414 1 000 1 414 2 236 3 000 2 000 1 000 0 000 1 000 2 000 3 162 2 236 1 414 1 000 1 414 2 236 2 915 1 581 2 828 2 236 4 123 3 162 2 236 1 414 1 000 1 414 4 000 3 000 2 000 1 000 0 000 1 000 4 123 3 162 2 236 1 414 1 000 1 414 3 808 0 707 3 606 2 000 5 099 4 123 3 162 2 236 1 414 1 000 5 000 4 000 3 000 2 000 1 000 0 000 5 099 4 123 3 162 2 236 1 414 1 000 4 743 0 707 4 472 2 236 2 000 2 236 2 828 3 606 4 472 5 385 1 000 1 414 2 236 3 162 4 123 5 099 0 000 1 000 2 000 3 000 4 000 5 000 2 550 4 528 1 414 4 123 2 236 2 000 2 236 2 828 3 606 4 472 1 414 1 000 1 414 2 236 3 162 4 123 1 000 0 000 1 000 2 000 3 000 4 000 2 550 3 536 1 000 3 162 2 828 2 236 2 000 2 236 2 828 3 606 2 236 1 414 1 000 1 414 2 236 3 162 2 000 1 000 0 000 1 000 2 000 3 000 2 915 2 550 1 414 2 236 3 606 2 828 2 236 2 000 2 236 2 828 3 162 2 236 1 414 1 000 1 414 2 236 3 000 2 000 1 000 0 000 1 000 2 000 3 536 1 581 2 236 1 414 4 472 3 606 2828 2 236 2 000 2 236 4 123 3 162 2 236 1 414 1 000 1 414 4 000 3 000 2 000 1 000 0 000 1 000 4 301 0 707 3 162 1 000 5 385 4 472 3 606 2 828 2 236 2 000 5 099 4 123 3 162 2 236 1 414 1 000 5 000 4 000 3 000 2 000 1 000 0 000 5 148 0 707 4 123 1 414 0 707 0 707 1 581 2 550 3 536 4 528 1 581 1 581 2 121 2 915 3 808 4 743 2 550 2 550 2 915 3 536 4 301 4 148 0 000 4 472 3 536 4 950 4 743 3 808 2 915 2 121 1 581 1 581 4 528 3 536 2 550 1 581 0 707 0 707 4 528 3 536 2 550 1 581 0 707 0 707 4 472 0 000 3 808 1 581 3 162 3 000 3 162 3 606 4 423 5 000 2 236 2 000 2 236 2 828 3606 4 472 1 414 1 000 1 414 2 236 3 162 4 123 3 536 3 808 0 000 3 000 5 000 4 243 3 606 3 162 3 000 3 162 4 472 3 606 2 828 2 236 2 000 2 236 4 123 3 162 2 236 1 414 1 000 1 414 4 950 1 581 3 000 0 000 Проводять виміри згідно інструкцій Наприклад, центрують антени приймачів над точками мережі, які закріплені реперами, калібрують приймачі і т д Одержані результати вимірів заносять у комп'ютер і згідно програми визначають положення точок на земній поверхні Переміщують системи GPS у т о ч к и мережі для проведення вимірів за визначеною схемою У табл 2 приведено оптимальний послідовний ряд сесій, визначений згідно винаходу, якому відповідає мінімум витрат на переміщення системи GPS Затрати на переміщення приймачів виражені в одиницях умовних витрат (у в ) Для переміщення системи GPS у виконуваних 1 2 т и сесіях необхідно витратити 37,618 одиниць у в 5 6 7 8 9 10 11 12 1 1 1 1 10 16 17 4 1 2 3 4 Приймачі А В 1 1 1 1 3 2 7 13 С 6 4 8 9 № сесії Приймач А Приймач В 3,915 7,301 3,65 4,576 2 1,707 3,817 Приймач С Затрати на переміщення приймачів у сесії (у в ) 6,828 9,222 3,414 3,414 5,236 7,301 11,536 4,828 3,414 3,964 18 14 17 19 10 Затрати на переміщення приймачів у сеем (у в ) 3 3,65 2 2 Комп'ютерна верстка М Клюкін 15 19 17 6 6 6 6 6 137,618 Таблиця 3 У табл 3 приведено розрахунок переміщення системи GPS у виконуваних сесіях за способом прототипом Для переміщення систем GPS у тих же самих виконуваних 1 2 т и сесіях необхідно витратити 62,157 одиниць у в Таблиця 2 № сесії 14 21 22 18 11 12 20 5 12 16 13 15 22 21 10 12 17 11 16 20 262,157 Підписне Тираж 39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the locations of points at the earth surface
Автори англійськоюTretiak Kornyliy Romanovych
Назва патенту російськоюСпособ определения положений точек на земной поверхности
Автори російськоюТретьяк Корнилий Романович
МПК / Мітки
МПК: G01C 5/00
Мітки: положення, точок, визначення, поверхні, спосіб, земній
Код посилання
<a href="https://ua.patents.su/4-60573-sposib-viznachennya-polozhennya-tochok-na-zemnijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення точок на земній поверхні</a>
Спосіб визначення положення точок на земній поверхні
Номер патенту: 42431
Опубліковано: 15.10.2001
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: визначення, спосіб, земній, точок, положення, поверхні
Формула / Реферат:
Cпociб визначення положення точок на земній поверхні, який заключається у тому, що проводять польове рекогносцирування місцевості, позначають на місцевості точки геодезичної мережі, обчислюють кількість сесій вимірів, розташовують одночасно не менше трьох систем GPS послідовно у визначених точках геодезичної мережі, проводять виміри i визначають положення точок на земній поверхні, який відрізняється тим, що після позначення на місцевості...
Спосіб визначення висотного положення точок геодезичної кінематичної мережі
Номер патенту: 47168
Опубліковано: 17.06.2002
Автор: Третяк Корнилій Романович
МПК: G01C 5/00
Мітки: визначення, геодезичної, кінематичної, точок, висотного, положення, мережі, спосіб
Формула / Реферат:
Спосіб визначення висотного положення точок геодезичної кінематичної мережі, який заключається у проведенні циклів спостережень висотного положення точок геодезичної кінематичної мережі, кожний з яких включає встановлення приладів для нівелювання на точках мережі і у технологічно необхідних місцях та вимірювання перевищень між точками з наступним урівноваженням висот точок, який відрізняється тим, що при урівноваженні висот точок мережі...
Спосіб визначення місцеположення точок акупунктури
Номер патенту: 37001
Опубліковано: 16.04.2001
Автори: Грицюк Ольга Володимирівна, Крижанівський Володимир Ярославович, Смердова Тетяна Андріївна
МПК: A61H 39/02
Мітки: акупунктури, визначення, спосіб, місцеположення, точок
Формула / Реферат:
1. Спосіб визначення місцеположення точок акупунктури, який полягає в тому, що встановлюють давач фізичного параметра на поверхні шкіри, переміщують його в передбачуваній зоні знаходження точки акупунктури і за максимальною амплітудою фізичного параметра, який вимірюють, визначають наявність точки акупунктури на місці розміщення давача, який відрізняється тим, що трьохелектродним давачем формують функціональне співвідношення імпедансів двох...
Спосіб визначення положення осі обертання ротора

Номер патенту: 29303
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
Мітки: положення, спосіб, визначення, обертання, осі, ротора
Формула / Реферат:
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують не менше як по три датчики, якими вимірюють одночасно лінійні швидкості V1, V2 і V3 в протистоячих датчикам точках на поверхні ротора при одночасному вимірюванні відстаней S1, S2 і S3 від датчиків до цих точок,...
Спосіб визначення взаємного зміщення точок прикладання сил до зразка на позацентрове розтягання
Номер патенту: 54742
Опубліковано: 17.03.2003
Автор: Курчаков Євгеній Євгенійович
МПК: G01B 5/30
Мітки: спосіб, прикладання, зразка, точок, взаємного, розтягання, зміщення, сіль, позацентрове, визначення
Формула / Реферат:
Спосіб визначення взаємного зміщення точок прикладання сил до зразка на позацентрове розтягання, який полягає в тому, що шукану величину розраховують за виміряними взаємними зміщеннями інших точок, який відрізняється тим, що вимірюють взаємне зміщення двох та двох базових точок (точок В та точок С) на двох базових стрижнях, кожний з яких під прямим кутом поєднаний (у точці А, розташованій між точкою В та точкою С) із своїм проміжним...
Попередній патент: Спосіб лікування ендотеліальної дисфункції у хворих з ішемічною хворобою серця
Наступний патент: Пристрій для прокатки порошкових матеріалів на металевій підкладці
Випадковий патент: Матричний екран для відтворення напівтонових зображень