Спосіб контролю навантажень на обертових об`єктах
Номер патенту: 83745
Опубліковано: 11.08.2008
Автори: Чехлатий Микола Олександрович, Мялковський Валентин Йосипович, Дворников Володимир Іванович, Цванг Віра Володимирівна, Пилипенко Дмитро Михайлович

Формула / Реферат
Спосіб контролю навантажень на обертових об'єктах, відповідно до якого формують за допомогою випромінювача у вигляді лазерного джерела промінь і спрямовують його на поліровану поверхню обертового вала, на якому закріплене навантаження, приймають відбиваючий промінь світлочутливим пристроєм і реєструють приладом, який відрізняється тим, що перший промінь лазерного джерела подають на Z-торцеву поверхню вала, другий - на твірну вала, що лежить в горизонтальній X-площині, а третій і четвертий промінь лазерного джерела подають по різні сторони навантаження на твірну вала, що лежить в вертикальній Y-площині, і провертають вал в одному напрямі таким чином, щоб здійснювався безперервний контроль амплітудного значення відхилення променя на виділених ділянках, фіксують зміну амплітуди в кожній площині окремо і обчислюють її максимальне значення в статиці, потім встановлюють частоту обертання вала, що дорівнює робочій частоті механізму, і виконують контроль амплітуди коливання вала в динаміці в кожній площині, і по отриманих значеннях амплітуди відхилення в динаміці і в статиці визначають величину вібрації обертового об'єкта, а по отриманих значеннях амплітуди відхилення в динаміці і в статиці третього і четвертого променя визначають величину крутного моменту.
Текст
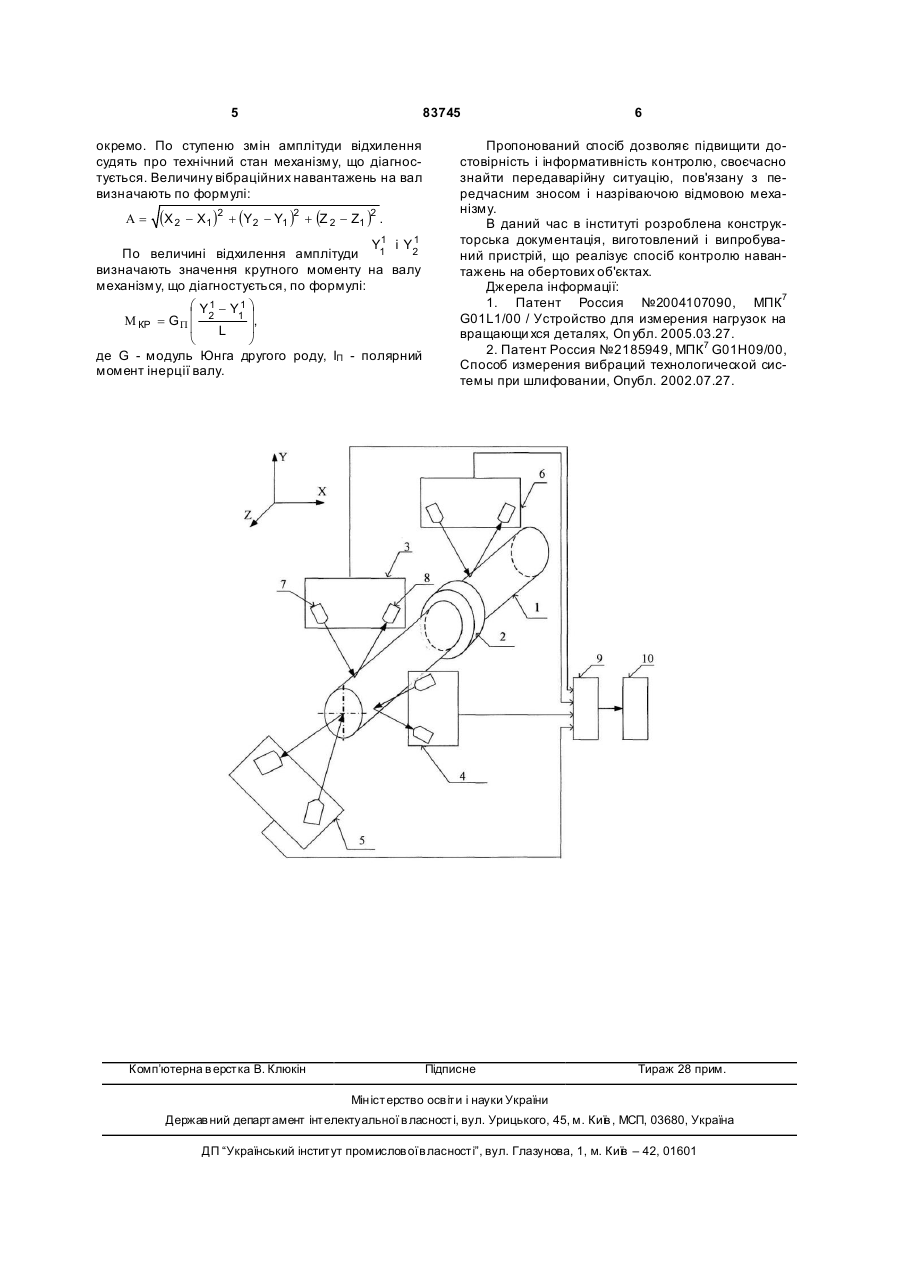
Спосіб контролю навантажень на обертових об'єктах, відповідно до якого формують за допомогою випромінювача у вигляді лазерного джерела C2 2 83745 1 3 83745 Пристрій, що реалізує спосіб, забезпечує безконтактне вимірювання вібрацій обертових частин технологічної системи на основі оптичних приладів з високою стабільністю вимірювання. У відомому пристрої не враховані шорсткості і дефекти покриття поверхні вимірювання обертового валу, що істотно знижує точність вимірювання амплітуди вібрації. Крім того, у відомому пристрої контроль амплітуди вібрації здійснюється в одній площині, що недостатнє для діагностики стану механізму. В основу винаходу поставлена задача: у способі контролю навантажень на обертових об'єктах шляхом обліку шорсткостей і дефектів покриття поверхні контроля обертового валу виконується калібрування контролю, що дозволяє підвищити точність отриманих результатів. Крім того, контроль величини крутного моменту та амплітуди відхилення вала в трьох площинах дозволяє підвищити достовірність і інформативність контролю. Поставлена задача розв'язується так, що в способі контролю навантажень на обертових об'єктах формують за допомогою випромінювача у вигляді лазерного джерела промінь і спрямовують його на поліровану поверхню обертового валу, на якому закріплене навантаження, приймають відбиваючий промінь світлочутливим пристроєм і реєструють приладом, відповідно до винаходу, перший промінь лазерного джерела, подають на торцеву Z поверхню валу, другий - на твірну валу, що лежить в горизонтальній X площині, а третій і четвертий промінь лазерного джерела подають, по різні сторони навантаження, на твірну валу, що лежить вертикальною Y і провертають вал в одному напрямі так, щоб здійснювався безперервний контроль амплітудного значення відхилення променя на виділених ділянках, фіксують зміну амплітуди в кожній площині окремо і обчислюють її максимальне значення в статиці, потім встановлюють частоту обертання валу, що дорівнює робочій частоті механізму, і виконують контроль амплітуди коливання валу в динаміці в кожній площині і по отриманим значенням амплітуди відхилення в динаміці і в статиці визначають величину вібрації обертового об'єкту, а по отриманим значенням амплітуди відхилення в динаміці і в статиці третього і четвертого променя визначають величину крутного моменту. Спосіб, що заявляється, реалізується наступним чином. Виділені ділянки бічної і торцевої поверхні валу, на якому закріплене навантаження, полірують. На торцеву Z поверхню валу подають перший промінь лазерного джерела. Приймають відбиваючий промінь світлочутливим пристроєм і реєструють приладом. Другий промінь лазерного джерела подають на твірну валу, що лежить в горизонтальній X площині, і реєструють відбиваючий промінь. Третій і четвертий промінь лазерного джерела подають по різні сторони навантаження на твірну валу, що лежить у вертикальній Y площини, і реєструють відбиваючі проміння. Провертають вал в одному напрямі таким чином, щоб здійснювався безперервний контроль амплітудного значення відхилення променя на виділених ді 4 лянках. Фіксують зміну амплітуди в кожній площині окремо і обчислюють її максимальне значення в статиці. Встановлюють частоту обертання валу рівній робочій частоті механізму і виконують контроль амплітуди коливання валу в динаміці. Потім по отриманим значенням амплітуди відхилення в динаміці і в статиці визначають величину вібрації обертового валу і величину крутного моменту. На Фіг.1 приведена схема пристрою, за допомогою якого реалізується спосіб контролю навантажень на обертових об'єктах. Пристрій містить вал 1, навантаження 2, блок 3 контролю амплітуди відхилення по вертикалі Y, блок 4 контролю амплітуди відхилення по горизонталі X, блок 5 контролю амплітуди відхилення осі Z, блок 6 контролю крутного моменту, кожний з блоків 3, 4, 5, 6 містить лазерне джерело 7 і світлочутли вий пристрій 8, реєструючий прилад 9 і ПЕОМ 10. Пристрій працює таким чином. Для контролю навантажень (вібрації та крутного моменту) обертового валу 1 виділені ділянки бічної і торцевої поверхні валу полірують. Встановлюють блок 3 контролю амплітуди відхилення по вертикалі У так, щоб здійснювався оптичний зв'язок між променем, спрямованим від лазерного джерела 7 на твірну валу 1, що лежить в горизонтальній площині, і прийнятим світлочутливим пристроєм 8 променя, відбиваючого від твірної валу 1. Блок 4 контролю амплітуди відхилення по горизонталі X встановлюють так, щоб здійснювався оптичний зв'язок між променем, спрямованим від лазерного джерела 7 на твірну валу 1, що лежить у вертикальній площині, і прийнятим світлочутливим пристроєм 8 променя, відбиваючого від твірної валу 1. Блок 5 контролю амплітуди відхилення по осі Z встановлюють так, щоб здійснювався оптичний зв'язок між променем, спрямованими від лазерного джерела 7 на торцеву поверхню валу 1 і прийнятим світлочутливим пристроєм 8 променя, відбиваючого від останньої. Блок 6 контролю крутного моменту встановлюють по іншу сторону навантаження на відстані L від блоку 3 контролю амплітуди відхилення по вертикалі Y1 таким чином, щоб здійснювався оптичний зв'язок між променем, спрямованим від лазерного джерела 7 на твірну валу 1, що лежить в горизонтальній площині, і прийнятим світлочутливим пристроєм 8 променя, відбиваючого від твірної валу 1. Провертають вал в одному напрямі так, щоб здійснювався безперервно контроль положення світлової плями за допомогою блоків 3, 4, 5, 6 у відповідній площині X, Y і Z. Реєструють приладом 9 і за допомогою ПЕОМ визначають величини відхиленнях Х1 Y1, Y11 і Z1 світлової плями в кожній площині X, Y і Z, по них судять про наявність шорсткостей і дефектів покриття контролюємих поверхонь валу 1 в статиці. Визначають відповідність між координатами Y1, Y1 1. Встановлюють частоту обертання валу, що дорівнює робочій частоті механізму. Визначають зміни положення Х2, Y2, Y12 і Z2 світлової плями в кожній площині в динаміці. По одержаних результатах з ура хуванням даних в статиці за допомогою ПЕОМ обчислюють амплітудні відхилення обертового валу в кожній площині 5 83745 окремо. По ступеню змін амплітуди відхилення судять про технічний стан механізму, що діагностується. Величину вібраційних навантажень на вал визначають по формулі: A= (X 2 - X1 )2 + (Y2 - Y1 )2 + (Z 2 - Z1 )2 . 1 1 Y1 i Y2 По величині відхилення амплітуди визначають значення крутного моменту на валу механізму, що діагностується, по формулі: æ Y1 - Y1 ö 1 ÷ M КР = G P ç 2 ç ÷, L è ø де G - модуль Юнга другого роду, ІП - полярний момент інерції валу. Комп’ютерна в ерстка В. Клюкін 6 Пропонований спосіб дозволяє підвищити достовірність і інформативність контролю, своєчасно знайти передаварійну ситуацію, пов'язану з передчасним зносом і назріваючою відмовою механізму. В даний час в інституті розроблена конструкторська документація, виготовлений і випробуваний пристрій, що реалізує спосіб контролю навантажень на обертових об'єктах. Джерела інформації: 1. Патент Россия №2004107090, МПК7 G01L1/00 / Устройство для измерения нагрузок на вращающи хся деталях, Оп убл. 2005.03.27. 2. Патент Россия №2185949, МПК7 G01H09/00, Способ измерения вибраций технологической системы при шлифовании, Опубл. 2002.07.27. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Автори англійськоюChekhlatyi Mykola Oleksandrovych, Dvornykov Volodymyr Ivanovych, Mialkovskyi Valentyn Yosypovych, Pylypenko Dmytro Mykhailovych, Tsvanh Vira Volodymyrivna
Автори російськоюЧехлатый Николай Александрович, Дворников Владимир Иванович, Мялковский Валентин Иосифович, Пилипенко Дмитрий Михайлович, Цванг Вера Владимировна
МПК / Мітки
МПК: G01H 11/00, G01L 1/00, G01H 9/00
Мітки: спосіб, контролю, навантажень, обертових, об'єктах
Код посилання
<a href="https://ua.patents.su/3-83745-sposib-kontrolyu-navantazhen-na-obertovikh-obehktakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю навантажень на обертових об`єктах</a>
Пристрій для вимірювання навантажень на обертових деталях
Номер патенту: 79434
Опубліковано: 25.06.2007
Автори: Маккель Еррі, Фівегер Мартін
МПК: G08C 17/00, G01L 3/02, G01L 3/10
Мітки: деталях, вимірювання, пристрій, обертових, навантажень
Формула / Реферат:
1. Вимірювальний пристрій для реєстрації навантажень, зокрема крутного моменту, згинального моменту і осьового зусилля, на обертових деталях, таких як вали, шпинделі або цапфи, за допомогою якого вимірюють і безконтактно реєструють виникаючу під навантаженням зміну довжини за допомогою щонайменше одного закріпленого на деталі тензодатчика, причому для безконтактного підведення живлення до тензодатчика і безконтактної передачі даних вимірювань...
Спосіб контролю початкових фаз зсуву поверхневих шарів грунту
Номер патенту: 41636
Опубліковано: 17.09.2001
Автори: Гнап Арлен Карпович, Коваленко Микола Йосипович
Мітки: спосіб, контролю, шарів, зсуву, грунту, початкових, поверхневих, фаз
Формула / Реферат:
Спосіб контролю початкових фаз зсуву поверхневих шарів грунту, який включає подачу сигналу лазерного променя почергово на відзеркалюючі поверхні контрольованих точок, прийом відбитого променя світлочутливими елементами на фотолінійці, реєстрацію відхилення відбитого променя фотолінійкою, по якому судять про відхилення контрольованої точки поверхневих шарів грунту від початкового положення.
Пристрій для контролю кутових деформацій валів обертових об’єктів
Номер патенту: 12090
Опубліковано: 25.12.1996
Автори: Жернаков Володимир Сергійович, Фрідман Борис Петрович
МПК: G01B 7/16, G01M 15/00
Мітки: деформацій, валів, кутових, пристрій, обертових, об'єктів, контролю
Формула / Реферат:
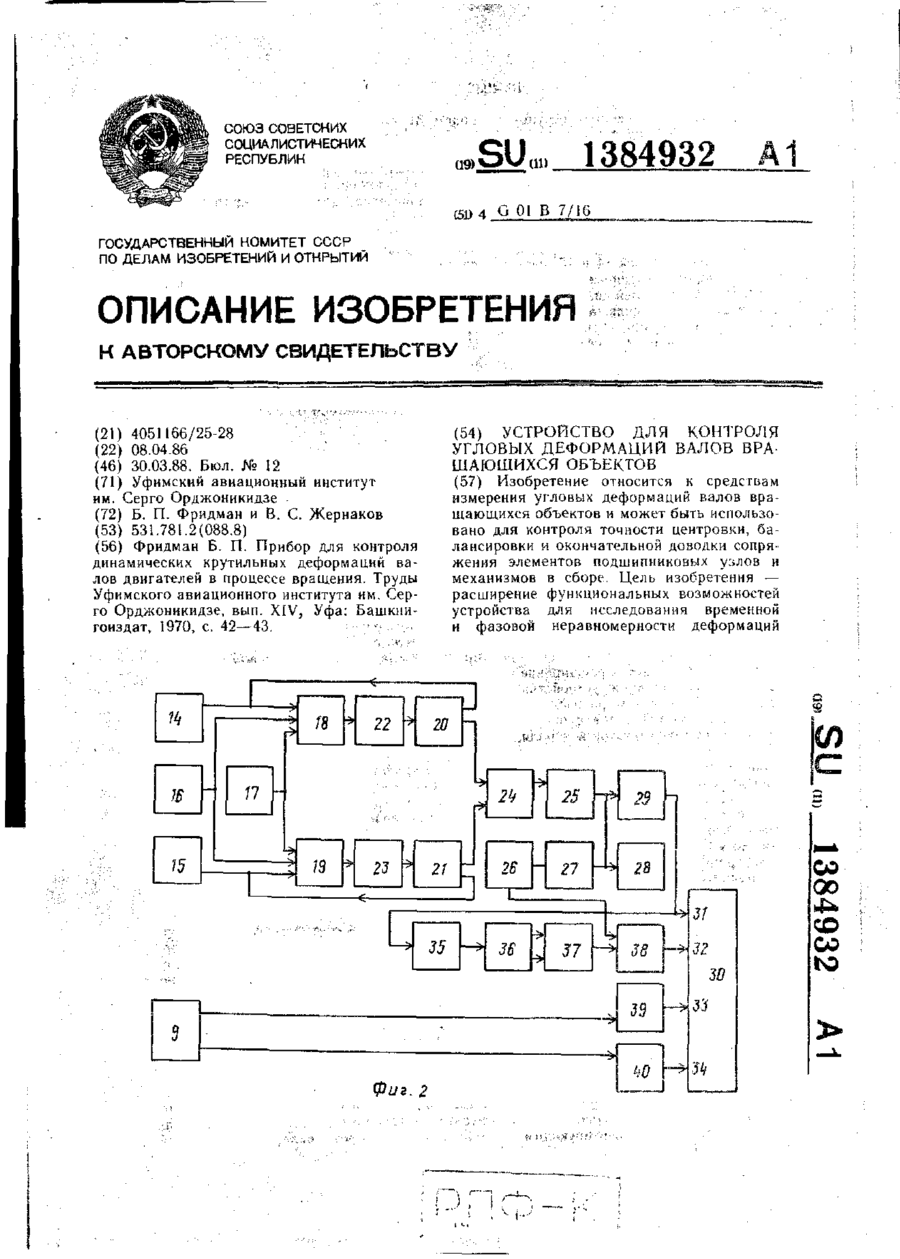
Устройство для контроля угловых деформаций валов вращающихся объектов, содержащее два диамагнитных диска с закрепленными на периферии кольцами из намагничивающего материала, предназначенные для установки на вал, две магнитные головки стационарно устанавливаемые против колец, стабилизированный блок питания, триггер, дифференцирующий блок, инвертирующий усилитель с прямым и инверсным выходами, вход которого соединен с выходом...
Спосіб контролю співвісності валів
Номер патенту: 62873
Опубліковано: 15.12.2005
Автори: Грядущий Борис Абрамович, Мялковський Валентин Йосипович, Логвиненко Володимир Іванович, Чехлатий Микола Олександрович
МПК: G01B 11/27, G01B 5/24
Мітки: контролю, спосіб, співвісності, валів
Формула / Реферат:
Спосіб одержання металевого порошку включає підготовку шихти на основі стружкових відходів чавуну, її термічну обробку, подрібнення спеку та розсів отриманого порошку. В процесі підготовки шихти стружкові відходи чавуну змішують з порошком або стружкою титану. Термічна обробка шихти включає відпал в середовищі нейтральних газів, водню або в вакуумі.
Спосіб контролю кормових раціонів птиці
Номер патенту: 76717
Опубліковано: 15.09.2006
Автор: Посудін Юрій Іванович
МПК: G01N 33/483
Мітки: контролю, раціонів, кормових, спосіб, птиці
Формула / Реферат:
Спосіб контролю кормових раціонів птиці, що включає оцінку стану оперення птиці, розмірів та взаємного розташування окремих елементів пера, який відрізняється тим, що відокремлюють елемент пера (промінь з гачечками) з оперення птиці, яку досліджують, пропускають лазерне випромінювання через елемент пера, реєструють лазерне випромінювання, що дифрагувало на елементі пера, за допомогою матриці фотодіодів реєструється сукупність електричних...
Попередній патент: Склад комплексного захисного середовища
Наступний патент: Спосіб лікування і профілактики виразок, пролежнів і ран, що погано загоюються, та пристрій для його реалізації
Випадковий патент: Спосіб адаптивної медіанної фільтрації імпульсних сигналів