Направляючий привід
Формула / Реферат
1. Направляючий привід з першим валком 6 та другим валком 5, встановленим з можливістю рухатися до першого валка 6, і з двома поворотними хитними рамками 2, 3, в яких знаходиться другий валок 6, встановлений з можливістю обертання, і на яких розміщений привідний пристрій 4, призначений у кожному випадку для обертання хитних рамок 2, 3, причому хитні рамки 2, 3 розміщені встановленими з можливістю обертання на рамі 12 незалежно одна від одної, який відрізняється тим, що хитні рамки 2, 3 розміщені на рамі 12 з можливістю обертання навколо осі обертання 13, причому направляючий привід містить вісь 9, встановлену на рамі з можливістю обертання.
2. Направляючий привід за п. 1, який відрізняється тим, що хитні рамки 2, 3 у кожному випадку встановлені з можливістю обертання на одному із своїх кінців, причому привідний пристрій 4 знаходиться на іншому кінці, а між двома цими кінцями знаходиться опора 7 другого валка 5.
3. Направляючий привід за одним з пп. 1 або 2, який відрізняється тим, що принаймні одна з двох хитних рамок 3 жорстко прикріплена до осі 9.
4. Направляючий привід за п. 3, який відрізняється тим, що друга хитна рамка 2 з'єднана з віссю 9 з можливістю обертання.
5. Направляючий привід за одним з пп. 1 або 2, який відрізняється тим, що хитні рамки 2, 3 в кожному випадку встановлені з можливістю обертання на окремій осі або на окремій цапфі.
6. Направляючий привід за одним з пп. 1 або 2, який відрізняється тим, що на рамі 12 встановлена жорстко закріплена вісь, і хитні рамки 2, 3 встановлені на цій осі з можливістю обертання.
7. Направляючий привід за одним з пунктів 1-6, який відрізняється тим, що передбачений обмежувач обертання 15, за допомогою якого забезпечується можливість обмежити обертальний рух принаймні однієї хитної рамки 2, 3 в заданих границях.
8. Направляючий привід за одним з пунктів 2-7, який відрізняється тим, що точка зачеплення привідного пристрою 4 на хитній рамці 2, 3, опора 7 другого валка 5 та опора хитної рамки 2, 3 на осі 9 або жорстке з'єднання між хитною рамкою 2, 3 та віссю 9 знаходяться практично на одній лінії.
Текст
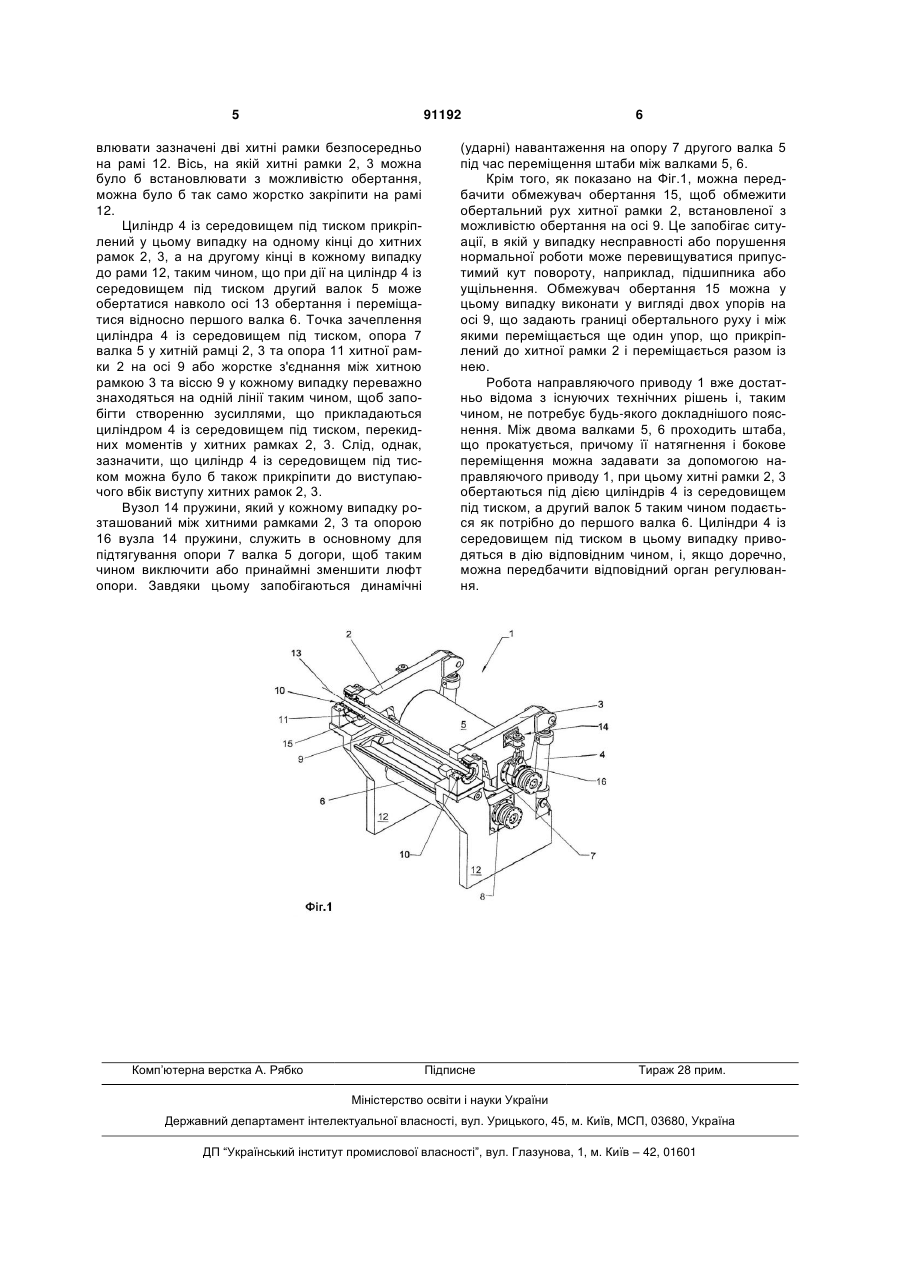
1. Направляючий привід з першим валком 6 та другим валком 5, встановленим з можливістю рухатися до першого валка 6, і з двома поворотними хитними рамками 2, 3, в яких знаходиться другий валок 6, встановлений з можливістю обертання, і на яких розміщений привідний пристрій 4, призначений у кожному випадку для обертання хитних рамок 2, 3, причому хитні рамки 2, 3 розміщені встановленими з можливістю обертання на рамі 12 незалежно одна від одної, який відрізняється тим, що хитні рамки 2, 3 розміщені на рамі 12 з можливістю обертання навколо осі обертання 13, причому направляючий привід містить вісь 9, встановлену на рамі з можливістю обертання. C2 2 (11) 1 3 перед змотуванням. Для цього валок, що може обертатися, приводиться в дію і подається до нерухомого валка таким чином, що в результаті положення цього валка відносно до нерухомого валка прокатана штаба піддається необхідному натягненню і необхідному боковому зміщенню. Опис такого направляючого приводу можна знайти, наприклад, у документах ЕР 192 982 В1 або DE 26 15 254 А1, де представлений привід, валок якого, що може обертатися, встановлений у безперервній хитній рамці. Опора цього валка може переміщатися за допомогою управляючих циліндрів з таким розрахунком, щоб валок міг відповідно переміщатися у своїй опорі. Слід, однак, зазначити, що через установку з можливістю переміщення такий привід має дуже складну конструкцію. В документі ЕР 747 147 В1 описаний направляючий привід, валок якого, що може обертатися, встановлений у двох хитних рамках, які в кожному випадку з'єднані з циліндром із середовищем під тиском, і хитні рамки можуть цими циліндрами приводитися в дію окремо. Ці дві хитні рамки жорстко з'єднані з торсіонною пружиною, що утворює вісь обертання хитних рамок. Коли хитні рамки приводяться в дію циліндрами з середовищем під тиском, вони впливають одна на одну, і при регулюванні зусилля завжди необхідно враховувати жорсткість торсіонної пружини. Однак жорсткість пружини точно невідома і, більш за те, ще й змінюється при зміні зовнішніх умов, наприклад, при зміні навколишньої температури, властивостей матеріалу пружини тощо, через що таке регулювання має певну притаманну неточність. В документі ЕР 1 086 916 А1 можна знайти опис опірного блока для подаваного натяжного валка, який складається з двох блоків, жорстко закріплених на осі, причому спільний вал у кожному випадку подається через обертання навколо ще одних осей. Недоліками цього рішення є складна конструкція і низька стійкість при високих навантаженнях. Таким чином, метою даного винаходу є створення направляючого приводу, який покращує відомі технічні рішення через те, що має просту конструкцію і може керуватися просто і точно. Ця мета досягається за допомогою направляючого приводу, в якому передбачені хитні рамки, встановлені з можливістю обертання на рамі незалежно одна від одної. Завдяки окремим хитним рамкам направляючий привід може мати дуже просту конструкцію, і відпадає потреба зважувати на взаємний вплив взаємозв'язаних хитних рамок, що робить керування направляючим приводом дуже простим і, понад усе, точним. Особливо переважним є те, що хитні рамки встановлюються на рамі на одному з їх кінців, а циліндр із середовищем під тиском в кожному випадку розташовується на іншому кінці, і між двома цими кінцями хитних рамок розташовується опора другого валка, що призводить, поміж іншого до кращої дії важелів. Особливо переважний варіант здійснення досягається у тому випадку, якщо вісь розміщується 91192 4 встановленою з можливістю обертання на рамі, і з цією віссю жорстко з'єднується одна з двох хитних рамок, і цей варіант можна навіть ще більше удосконалити, якщо з цією віссю з'єднується з можливістю обертання друга хитна рамка. Завдяки цьому конструкція спрощується, оскільки для установки двох хитних рамок з можливістю обертання незалежно одна від одної потрібна лише одна вісь. Функціональна надійність направляючого приводу підвищиться, якщо передбачити обмежувач обертання, щоб запобігти занадто далекому обертанню хитної рамки і можливому пошкодженню або руйнуванню у результаті цього деталей направляючого приводу або хитної рамки, наприклад, опори або ущільнення. Особливо переважним є те, що опора валка і опора хитної рамки розташовані на одній лінії, щоб запобігти виникненню перекидного моменту через приводне зусилля приводного пристрою. Нижче пропонований направляючий привід описується із посиланнями на примірну Фіг.1, що не обмежує об'єм цього винаходу і показує цей направляючий привід у тримірному вигляді. Направляючий привід 1 на Фіг.1 складається в основному з рами 12, в якій в опорі 8 встановлений перший валок 6, у цьому випадку практично нерухомо. Вираз "встановлений нерухомо" у цьому випадку означає, що валок, хоча і може обертатися, не має практично ніяких інших ступенів свободи відносно рами 12. Другий валок 5 встановлений з можливістю обертання в іншій опорі 7 таким чином, що може подаватися до першого валка 6, тобто переміщатися відносно першого валка 6. Для цього передбачені дві хитні рамки 2, 3, що встановлені з можливістю обертання відносно осі 13 обертання на рамі. Другий валок 5 встановлений з можливістю обертання в опорі 7 в хитних рамках 2, 3, а на вільному кінці хитних рамок 2, 3 у кожному випадку передбачений приводний пристрій 4, наприклад, у цьому випадку циліндр із середовищем під тиском, переважно, гідравлічний циліндр. Хитні рамки 2, 3 встановлені на рамі 12 таким чином, щоб вони могли рухатися окремо і незалежно одна від одної. Для цього у прикладі на Фіг.1 вісь 9, наприклад, труба, встановлена з можливістю обертання на рамі 12 у двох підшипниках 10, у цьому випадку, наприклад, у підшипниках, що обертаються, таких як наприклад, роликовий підшипник або самоустановлюваний роликовий підшипник. Одна хитна рамка 3 жорстко з'єднана, наприклад, зварюванням, з віссю 9, як показано на Фіг.1. Друга хитна рамка 2 встановлена на осі 9 з можливістю обертання за допомогою підшипника 11, у цьому випадку знов-таки роликового підшипника. Отже, ці дві хитні рамки 2, 3 можуть рухатися повністю незалежно одна від одної. Втім було б, природно, так само легко передбачити у кожному випадку установку двох хитних рамок 2, 3 відповідним чином з можливістю обертання на окремій осі або на окремій цапфі, з'єднаними з рамою, причому у кожному випадку хитну рамку 2, 3 можна було б жорстко кріпити до цієї осі або цапфи або встановлювати на них, або встано 5 91192 влювати зазначені дві хитні рамки безпосередньо на рамі 12. Вісь, на якій хитні рамки 2, 3 можна було б встановлювати з можливістю обертання, можна було б так само жорстко закріпити на рамі 12. Циліндр 4 із середовищем під тиском прикріплений у цьому випадку на одному кінці до хитних рамок 2, 3, а на другому кінці в кожному випадку до рами 12, таким чином, що при дії на циліндр 4 із середовищем під тиском другий валок 5 може обертатися навколо осі 13 обертання і переміщатися відносно першого валка 6. Точка зачеплення циліндра 4 із середовищем під тиском, опора 7 валка 5 у хитній рамці 2, 3 та опора 11 хитної рамки 2 на осі 9 або жорстке з'єднання між хитною рамкою 3 та віссю 9 у кожному випадку переважно знаходяться на одній лінії таким чином, щоб запобігти створенню зусиллями, що прикладаються циліндром 4 із середовищем під тиском, перекидних моментів у хитних рамках 2, 3. Слід, однак, зазначити, що циліндр 4 із середовищем під тиском можна було б також прикріпити до виступаючого вбік виступу хитних рамок 2, 3. Вузол 14 пружини, який у кожному випадку розташований між хитними рамками 2, 3 та опорою 16 вузла 14 пружини, служить в основному для підтягування опори 7 валка 5 догори, щоб таким чином виключити або принаймні зменшити люфт опори. Завдяки цьому запобігаються динамічні Комп’ютерна верстка А. Рябко 6 (ударні) навантаження на опору 7 другого валка 5 під час переміщення штаби між валками 5, 6. Крім того, як показано на Фіг.1, можна передбачити обмежувач обертання 15, щоб обмежити обертальний рух хитної рамки 2, встановленої з можливістю обертання на осі 9. Це запобігає ситуації, в якій у випадку несправності або порушення нормальної роботи може перевищуватися припустимий кут повороту, наприклад, підшипника або ущільнення. Обмежувач обертання 15 можна у цьому випадку виконати у вигляді двох упорів на осі 9, що задають границі обертального руху і між якими переміщається ще один упор, що прикріплений до хитної рамки 2 і переміщається разом із нею. Робота направляючого приводу 1 вже достатньо відома з існуючих технічних рішень і, таким чином, не потребує будь-якого докладнішого пояснення. Між двома валками 5, 6 проходить штаба, що прокатується, причому її натягнення і бокове переміщення можна задавати за допомогою направляючого приводу 1, при цьому хитні рамки 2, 3 обертаються під дією циліндрів 4 із середовищем під тиском, а другий валок 5 таким чином подається як потрібно до першого валка 6. Циліндри 4 із середовищем під тиском в цьому випадку приводяться в дію відповідним чином, і, якщо доречно, можна передбачити відповідний орган регулювання. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDirectional drive
Автори англійськоюMoser Friedrich, Rab Werner, Gatterbauer Roland
Назва патенту російськоюНаправляющий привод
Автори російськоюМозер Фридрих, Раб Вернер, Гаттербауэр Роланд
МПК / Мітки
МПК: B65H 20/02, B21D 43/04, B21C 47/34
Мітки: привід, направляючий
Код посилання
<a href="https://ua.patents.su/3-91192-napravlyayuchijj-privid.html" target="_blank" rel="follow" title="База патентів України">Направляючий привід</a>
Направляючий валок
Номер патенту: 79382
Опубліковано: 11.06.2007
Автори: Старрермаір Томас, Дейбл Гюнтер, Гуттенбруннер Дзозеф
МПК: B22D 11/128
Мітки: валок, направляючий
Формула / Реферат:
1. Направляючий валок для утримування та направлення відлитої металевої штаби в установці безперервного лиття, що містить центральний поворотний вал (1) та щонайменше один бандаж (3) валка, який утримується на даному валу і зафіксований проти обертання, який відрізняється тим, що бандаж (3) валка утримується на валу (1) опорними кільцями (4), а між валом (1) та бандажем (3) валка утворена кільцева камера (6), яка аксіально обмежена опорними...
Направляючий апарат одностопної ковпакової печі
Номер патенту: 12155
Опубліковано: 16.01.2006
Автори: Утьомова Юлія Віталіївна, Бойко Володимир Семенович, Норка Сергій Петрович, Бочаров Володимир Віталійович, Бочаров Віталій Федорович
МПК: F27B 11/00
Мітки: ковпакової, печі, направляючий, апарат, одностопної
Формула / Реферат:
1. Направляючий апарат одностопної ковпакової печі, який містить корпус, опорні поверхні для установки відпалювальних рулонів, канали для проходу захисного газу, робоче колесо відцентрового вентилятора, який відрізняється тим, що усередині корпуса направляючого апарата по центру розміщено малий направляючий апарат зі своїми каналами для проходу захисного газу та робочим колесом, розташованим над робочим колесом направляючого апарата і...
Направляючий ролик
Номер патенту: 15211
Опубліковано: 15.06.2006
Автор: Бондар Петро Степанович
МПК: B27B 13/00
Мітки: ролик, направляючий
Формула / Реферат:
Направляючий ролик, що включає корпус, вісь, внутрішню пару підшипників, який відрізняється тим, що розташована в корпусі вісь має одну опору сферичний підшипник, а як другу - різьбову втулку з діаметрально розміщеними регулювальними болтами, а також на внутрішній парі підшипників розміщена перехідна втулка, на якій розміщені два підшипники.
Направляючий пристрій для бурових штанг
Номер патенту: 9981
Опубліковано: 17.10.2005
Автори: Рутковський Олександр Юрійович, Сурело Володимир Олександрович
МПК: E21B 19/00
Мітки: пристрій, бурових, штанг, направляючий
Формула / Реферат:
1. Направляючий пристрій для бурових штанг, корпус якого має отвори для проходу бурової штанги та містить пружні елементи, виконані з відрізків сталевого каната, закріплені своїми кінцями в корпусі, та центруючі елементи, установлені на пружних елементах, який відрізняється тим, що кожний із пружних елементів одним з кінців жорсткозакріплений у втулці, яка має зовнішню різь і лиски, та встановлений цим кінцем в одному із співвісних...
Направляючий стрічку валок із внутрішнім охолодженням
Номер патенту: 83851
Опубліковано: 26.08.2008
Автори: Дейбл Гюнтер, Гуттенбруннер Жозеф, Віммер Франц, Тьоне Хайнріх, Шан Гуоксін, Пьоппл Йоханн, Ланшуцер Жозеф
МПК: F28F 5/00, B22D 11/128
Мітки: внутрішнім, направляючий, валок, охолодженням, стрічку
Формула / Реферат:
1. Направляючий стрічку валок із внутрішнім охолодженням, переважно для установки безперервного лиття, що має центральну обертову вісь 1 і принаймні одну оболонку 4 валка, що спирається на цю вісь, зафіксовану від обертання, який відрізняється тим, що оболонка 4 валка має проходи 22, 22а, 22b, 22с для потоку холодоагенту, що проходять через неї, і зазначені проходи для потоку холодоагенту розміщені в оболонці валка на постійній відстані від...