Спосіб автоматичного регулювання параметрів інерційних об’єктів із запізнюванням
Номер патенту: 67725
Опубліковано: 12.03.2012
Автори: Коновалов Михайло Андрійович, Бунке Олександр Сергійович, Ковриго Юрій Михайлович
Формула / Реферат
Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, який відрізняється тим, що керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією:
![]() ,
,
де ![]() - коефіцієнт підсилення форсуючого каналу регулятора,
- коефіцієнт підсилення форсуючого каналу регулятора,
![]() - стала часу інтегрування форсуючого каналу регулятора,
- стала часу інтегрування форсуючого каналу регулятора,
![]() - диференційний оператор Лапласа,
- диференційний оператор Лапласа,
після чого, для забезпечення стійкості системи керування, із заданим запізнюванням додають компенсаційний сигнал другого каналу, що корегує сигнал першого каналу згідно з функцією:
![]() ,
,
де ![]() - коефіцієнт налаштування пропорційної частини коректора,
- коефіцієнт налаштування пропорційної частини коректора,
![]() - основа натурального логарифму,
- основа натурального логарифму,
![]() ,
, ![]() ,
, ![]() ...
... ![]() - сталі часу затримки корегуючого сигналу,
- сталі часу затримки корегуючого сигналу,
![]() - диференційний оператор Лапласа.
- диференційний оператор Лапласа.
Текст
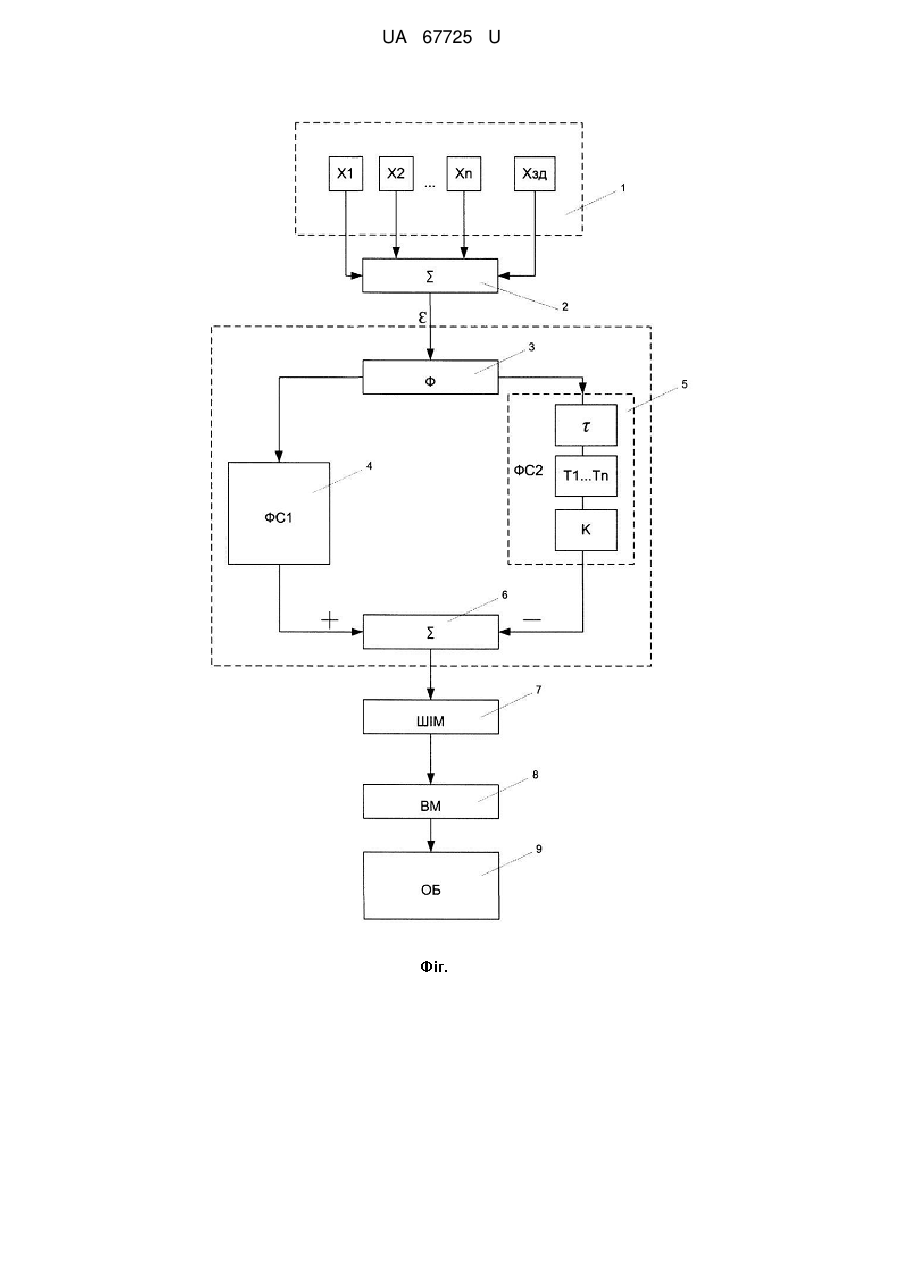
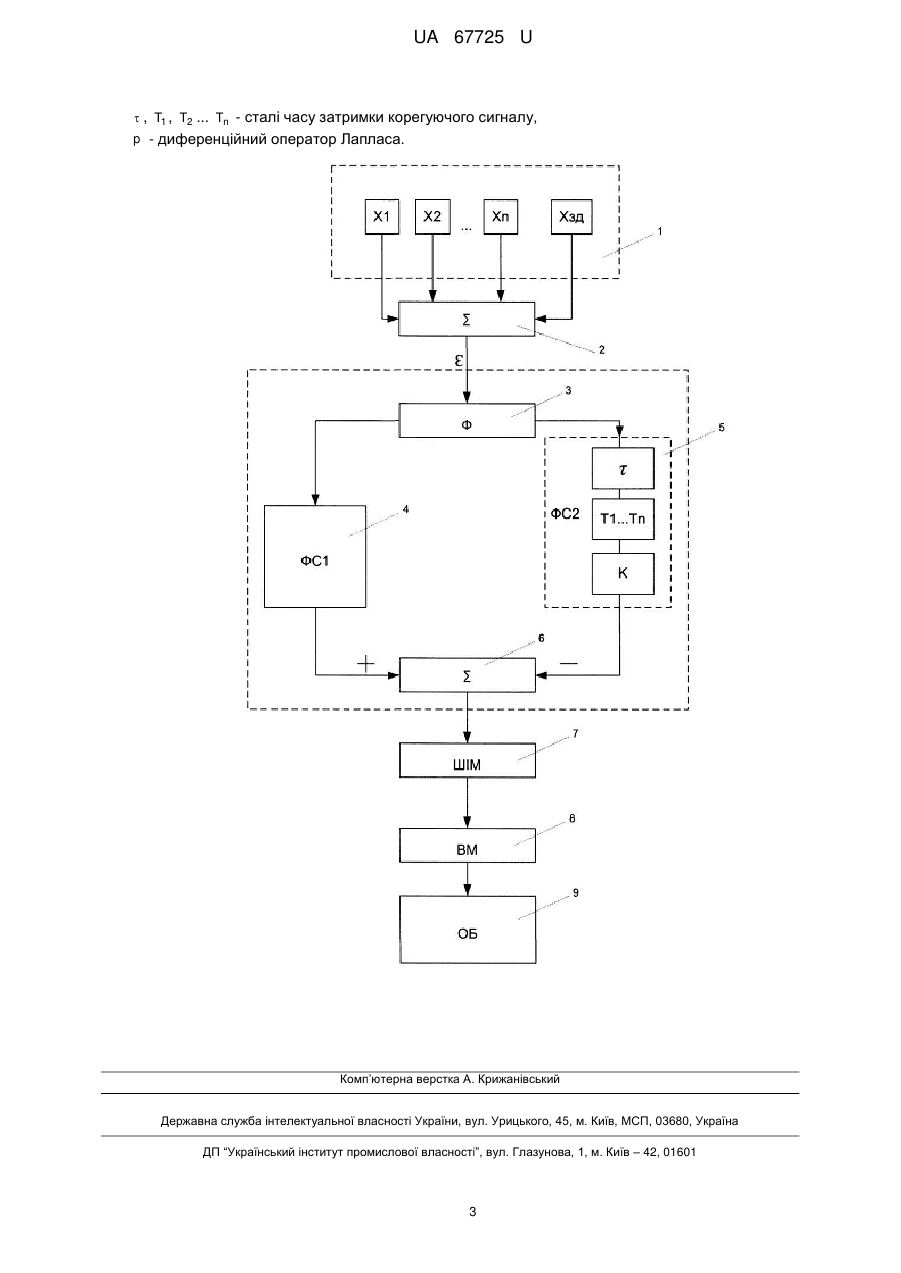
Реферат: Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, причому керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом, після чого, для забезпечення стійкості системи керування, із заданим запізнюванням додають компенсаційний сигнал другого каналу, що корегує сигнал першого каналу. UA 67725 U (12) UA 67725 U UA 67725 U 5 10 15 20 25 30 35 40 Пропонований спосіб регулювання призначений переважно для використання в системах автоматизації інерційних об'єктів в енергетичній, хімічній, металургійній, нафтопереробній, будівельної, харчової та інших галузях промисловості, динамічні властивості яких характеризуються нестабільністю динамічних характеристик. Відомий спосіб регулювання інерційних об'єктів із запізнюванням, що полягає у використанні "пульсуючого" (ковзаючого) режиму, який характеризується частими короткочасними включеннями регулятора на протязі всього часу протікання перехідного процесу. Через небезпеку перерегулювання в пульсуючому режимі зазвичай використовують мінімальну тривалість включень регулятора, що призводить до збільшення динамічного відхилення параметра і затягування тривалості процесу регулювання. Пульсуючий режим є основним режимом роботи стандартних промислових пропорційноінтегральних (ПІ) регуляторів різних систем і детально описаний в різних літературних джерелах (див. книгу М.А. Коновалов "Проблеми автоматизації інерційних теплоенергетичних об'єктів" К.: вид. Фенікс, 2009. - С. 100). Відомо також, що у будь-яких систем авторегулювання є кілька найважливіших показників, що характеризують ступінь їх досконалості, серед них: швидкодія регулятора і запас стійкості системи. В класичних системах існує "технічне протиріччя" між цими показниками якості: при збільшенні швидкодії регулятору запас стійкості системи автоматичного регулювання зменшується. Перевага віддається тим системам, де між цими показниками не існує технічного протиріччя. Усунути технічне протиріччя у відомому способі шляхом компромісного вибору параметрів налаштування одноканального алгоритму управління регулюючого мікропроцесорного контролера технічно не представляється можливим. Компроміс - це завжди вибір між прагненням поліпшити один показник за рахунок погіршення іншого. У відомому способі поліпшити показник стійкості можливо тільки за рахунок зниження швидкодії регулятора, що автоматично веде до збільшення динамічної похибки та зниження якості регулювання. Задачею корисної моделі є забезпечення стійкості параметрів інерційних об'єктів із запізнюванням, та підтримання високої якості перехідних процесів в умовах нестабільності динамічних характеристик регульованих об'єктів. Поставлена задача вирішується тим, що спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням полягає у формуванні керуючого сигналу за пропорційноінтегральним законом регулювання мікропроцесорним контролером, згідно з корисною моделлю, керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією: 1 , W1p K1 1 T p i де K1 - коефіцієнт підсилення форсуючого каналу регулятора, Т1 - стала часу інтегрування форсуючого каналу регулятора, р - диференційний оператор Лапласа, після чого, для забезпечення стійкості системи керування, із заданим запізнюванням додають компенсаційний сигнал другого каналу, що корегує сигнал першого каналу згідно з функцією: W2 p e p 45 50 55 1 1 1 ... K , T1 p 1 T2 p 1 Tn p 1 2 де K2 - коефіцієнт налаштування пропорційної частини коректора, e 2,718 - основа натурального логарифму, , T1 , T2 … Tn - сталі часу затримки корегуючого сигналу, р - диференційний оператор Лапласа. Суть запропонованого способу полягає в тому, що шляхом структурування, тобто поділу недостатньо досконалого одноканального алгоритму управління, застосованого у відомих мікропроцесорних контролерах, передбачається формування двох незалежних каналів керуючого сигналу. Кожен з каналів вирішує свою логічно завершену задачу по швидкодії системи регулювання та забезпеченню її стійкості. Спосіб може бути здійснений за допомогою системи автоматичного керування, блок-схема якої зображена на кресленні. Контролер містить пристрій введення 1 вхідних сигналів Х1….Хзд, які перетворюються в аналогово-цифровому перетворювачі в їх цифрові еквіваленти. Суматор 2 обчислює загальну неузгодженість ε, що потім обробляється фільтром 3. 1 UA 67725 U 5 10 15 20 25 30 35 Цифровий обчислювальний пристрій містить мікропроцесор, оперативний і постійний запам'ятовуючі пристрої, бібліотеку функціональних блоків для формування структур ФС1 4, ФС2 5, а також елементи для передачі та обробки інформації (на схемі не показані). Вихідні сигнали ФС1 і ФС2 подаються на суматор 6, широтно-імпульсний модулятор 7, що здійснює управління виконавчим механізмом 8, який впливає на об'єкт керування 9. Система автоматичного регулювання, що реалізує запропонований спосіб, працює наступним чином: при відхиленні регульованого параметра X 1…Хn від заданого значення Хзд на виході суматора 2 з'являється сигнал неузгодженості . Оброблений фільтром 3, сигнал ε паралельно надходить в керуючий швидкодіючий канал ФС1 та інерційний корегуючий канал ФС2. Першим вступає в роботу швидкодіючий ФС1 канал, вихідний сигнал якого модулюється ШІМ і надходить на виконавчий механізм ВМ, що переміщає регулюючий орган об'єкта керування ОБ на величину, достатню для компенсації впливу збурення. Канал ФС2 вступає в роботу після проходження часу затримки, його вихідний сигнал частково компенсує сигнал від ФС1 тим самим запобігає перерегулюванню і збільшує запас стійкості системи. Таке структурування алгоритму управління допомагає вирішити проблему технічного протиріччя, пов'язану з швидкодією і стійкістю системи автоматичного регулювання. Розмежування в часі дії каналів ФС1 і ФС2 дозволяє забезпечити оптимальну швидкодію контролера в початковій фазі, таким чином мінімізуючи відхилення регульованого параметра, а також зберегти стійкість системи своєчасно обмеживши чутливий швидкодіючий канал. Швидкодія системи забезпечується параметрами налаштування стандартного ПІД-регулятора каналу ФС1. Запас стійкості системи забезпечується параметрами налаштування додаткового корегуючого інерційного каналу ФС2: Kк, , Т1, Т2 Можливість незалежного налаштування кожного з каналів дозволяє вирішити протиріччя між швидкодією і запасом стійкості системи, тим самим усунути недоліки відомого способу регулювання, де налаштування системи вибираються, виходячи з компромісу між цими найважливішими характеристиками системи. Запропонований новий спосіб регулювання параметрів інерційних об'єктів може бути використаний з метою підвищення якості перехідних процесів для побудови систем автоматичного регулювання широкого спектра об'єктів, які характеризуються нестабільністю динамічних характеристик, акумулюючою здатністю, інерційністю і транспортним запізненням. Новизна запропонованого способу регулювання полягає в удосконаленні логічної послідовності операцій, закладених в обчислювальному пристрої мікропроцесорного контролера, шляхом формування швидкодіючого та додаткового інерційного корегуючого каналів керуючого впливу. Експериментальна перевірка нового способу показала, що стійкість системи авторегулювання зберігається при зміні динамічних характеристик об'єкта регулювання в 1,5…2 рази. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, який відрізняється тим, що керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією: 1 W1p K1 1 T p , i де K 1 - коефіцієнт підсилення форсуючого каналу регулятора, 50 Ti - стала часу інтегрування форсуючого каналу регулятора, p - диференційний оператор Лапласа, після чого, для забезпечення стійкості системи керування, із заданим запізнюванням додають компенсаційний сигнал другого каналу, що корегує сигнал першого каналу згідно з функцією: W2 p e p 55 1 1 T1 p 1 T2 p 1 ... 1 Tn p 1 K2 , де K 2 - коефіцієнт налаштування пропорційної частини коректора, e 2,718 - основа натурального логарифму, 2 UA 67725 U , T1 , T2 ... Tn - сталі часу затримки корегуючого сигналу, p - диференційний оператор Лапласа. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic controlling parameters of inertia objects with delays
Автори англійськоюKovryho Yurii Mykhailovych, Konovalov Mykhailo Andriiovych, Bunke Oleksandr Serhiiovych
Назва патенту російськоюСпособ автоматического регулирования параметров инерционных объектов с запаздыванием
Автори російськоюКовриго Юрий Михайлович, Коновалов Михаил Андреевич, Бунке Александр Сергеевич
МПК / Мітки
МПК: G05B 11/00
Мітки: інерційних, об'єктів, запізнюванням, регулювання, параметрів, автоматичного, спосіб
Код посилання
<a href="https://ua.patents.su/5-67725-sposib-avtomatichnogo-regulyuvannya-parametriv-inercijjnikh-obehktiv-iz-zapiznyuvannyam.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання параметрів інерційних об’єктів із запізнюванням</a>
Спосіб автоматичного регулювання параметрів інерційних об’єктів
Номер патенту: 77970
Опубліковано: 15.02.2007
Автор: Коновалов Михайло Андрійович
МПК: G05B 11/36, G05B 13/00
Мітки: регулювання, автоматичного, інерційних, параметрів, спосіб, об'єктів
Формула / Реферат:
Спосіб автоматичного регулювання параметрів інерційних об’єктів, що полягає у формуванні основного пропорційно-інтегрального закону регулювання за допомогою нелінійного автоматичного регулятора з гнучким зворотним зв’язком, який відрізняється тим, що на вхід нелінійного автоматичного регулятора при регулюванні спочатку подають сигнал швидкодіючого зворотного зв’язку для забезпечення швидкісної дії регулятора в початковій фазі перехідного...
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику
Номер патенту: 61154
Опубліковано: 11.07.2011
Автори: Плєвє Олександр Георгійович, Чекан Олександр Михайлович
МПК: F24F 5/00, G05D 23/00
Мітки: параметрів, спосіб, пташнику, регулювання, автоматичного, мікроклімату
Формула / Реферат:
Спосіб регулювання параметрів мікроклімату в пташнику, який включає вимірювання температури повітря у пташнику та її регулювання шляхом зміни витрат палива на горіння в теплогенераторах, який відрізняється тим, що додатково вимірюють вологість повітря та регулюють її шляхом зміни витрат води на розприскування у пташнику, вимірюють розрідження та регулюють його шляхом зміни величини відкриття бокових клапанів в обладнанні вентиляції пташника,...
Спосіб автоматичного регулювання об’єктом на основі обчислення векторної похибки автоматичного регулювання

Номер патенту: 91398
Опубліковано: 26.07.2010
Автор: Агамалов Олег Миколайович
МПК: G05B 13/02, G05B 11/01
Мітки: об'єктом, основі, автоматичного, спосіб, обчислення, векторної, похибки, регулювання
Формула / Реферат:
Спосіб автоматичного регулювання об'єктом регулювання на основі обчислення векторної похибки автоматичного регулювання, в якому вихідний сигнал об'єкта регулювання регулюють шляхом зміни сигналу на виході регулятора, який відрізняється тим, що вихідний сигнал об'єкта регулювання y визначають як вектор з врахуванням фазового (або часового) зсуву відносно сигналу на вході (або сигналу заданої уставки) об'єкта регулювання, визначають...
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Жиляков Віктор Іванович, Ткачов Роман Юрійович
МПК: G05B 13/02
Мітки: система, запізнюванням, об'єктом, керування
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Спосіб автоматичного регулювання завантаження зернозбирального комбайна
Номер патенту: 67447
Опубліковано: 27.02.2012
Автори: Бісюк Віктор Анатолійович, Мірошниченко Марія Сергіївна, Дідик Олександр Костянтинович, Осадчий Сергій Іванович, Віхрова Лариса Григорівна
МПК: A01D 41/12
Мітки: завантаження, зернозбирального, регулювання, комбайна, спосіб, автоматичного
Формула / Реферат:
Спосіб автоматичного регулювання завантаження зернозбирального комбайна, що включає керування поступальною швидкістю комбайна за сигналом різниці відношень частоти обертання молотильного барабана до частоти обертання вала двигуна, виміряних в ручному та автоматичному режимах, який відрізняється тим, що з метою підвищення точності регулювання враховують не лише знак різниці відношень частот обертання молотильного барабана та вала двигуна, а й...
Попередній патент: Спосіб усунення гострої стадії набряку-набухання головного мозку
Наступний патент: Спосіб одержання референтної позитивної сироватки для діагностики лейкозу великої рогатої худоби в реакції імунодифузії (рід) та імуноферментному аналізі (іфа)
Випадковий патент: Пристрій для контролю міцності піщано - глинястої суміші на стиснення в процесі її приготування