Спосіб контролю рівня води в водоймі
Номер патенту: 92416
Опубліковано: 25.10.2010
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Слабак Сергій Ігорович
Формула / Реферат
Спосіб контролю рівня води у водоймищі, заснований на використанні ультразвукового методу передачі інформації, який відрізняється тим, що інформацію про висоту водної поверхні передають від водомірних ультразвукових підводних реперів при забезпеченні прямого ультразвукового зв'язку між сусідніми реперами; на кожному ультразвуковому репері за допомогою зеніт-ехолота у вертикальному каналі вимірюють перевищення рівня водної поверхні відносно репера, перетворюють результат в електронний код, який перетворюють в ультразвуковий код і за допомогою ультразвуку передають сигнали по горизонтальному каналу на сусідній ультразвуковий репер, в якому цей сигнал приймають на ультразвуковий приймач, перетворюють у відповідний електронний код з посиленням і через ультразвуковий випромінювач передають на наступний по ланцюжку реперів ультразвуковий репер, у результаті кожен водомірний ультразвуковий репер виконує функцію вимірювання рівня води і функцію передачі інформації по горизонтальному ультразвуковому каналу по ланцюжку реперів до репера головного водомірного поста (ГВП), групи водомірних постів, де інформацію перетворюють в електронний цифровий вигляд і передають по кабелю на береговий приймальний пункт ГВП, потім інформацію обробляють, кодують і результати передають по радіоканалу на центральну станцію обробки даних рівня води водоймища.
Текст
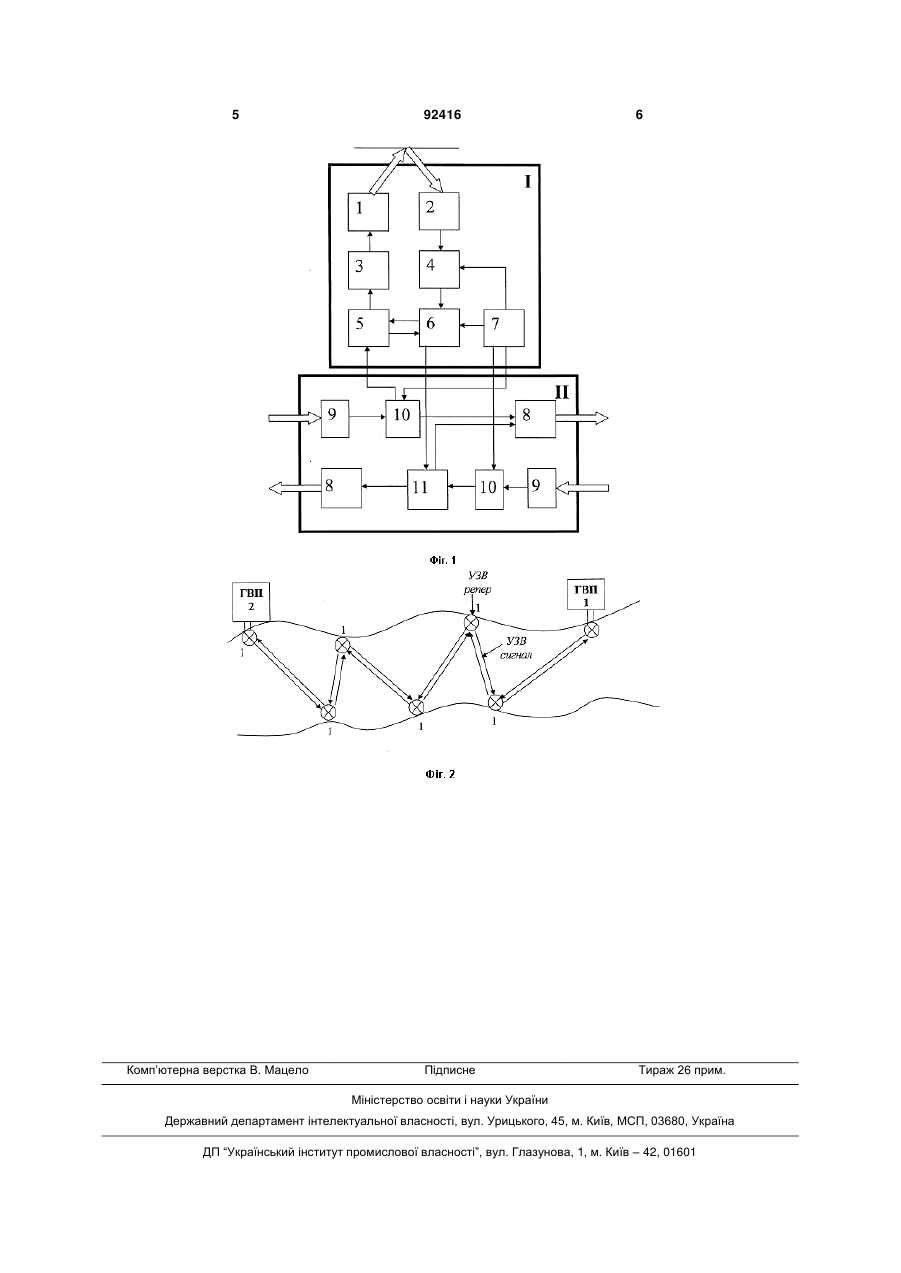
Спосіб контролю рівня води у водоймищі, заснований на використанні ультразвукового методу передачі інформації, який відрізняється тим, що інформацію про висоту водної поверхні передають від водомірних ультразвукових підводних реперів при забезпеченні прямого ультразвукового зв'язку між сусідніми реперами; на кожному ультразвуко C2 2 (19) 1 3 зультаті кожен водомірний УЗВ репер виконує функцію вимірювання рівня води і функцію передачі інформації по горизонтальному УЗВ каналу по ланцюжку реперів до репера головного водомірного поста(ГВП), групи ВП де інформацію перетворять в електронний цифровий вигляд і передають по кабелю на береговий приймальний пункт ГВП, потім інформацію обробляють, кодують і результати передають по радіоканалу на центральну станцію обробки даних рівня води водоймища. Технічним результатом являється підвищення техніко-економічної ефективності промірних робіт за рахунок підвищення рівня автоматизації управління ПС, економії палива і матеріалів. Запропонований спосіб реалізується системою контролю рівня води(СКРВ), схема робочого репера якого представлена на фіг. 1 І. Зеніт-Ехолот: 1. УЗВ випромінювач (для вимірювання висоти водної поверхні). 2. УЗВ приймач. 3. УЗВ генератор. 4. Підсилювач. 5. Блок управління. 6. Блок обробки інформації. 7. Блок живлення. II. Приймально-Передавальний модуль 8. УЗВ випромінювач з перетворенням в УЗВ сигнал (для обміну інформацією між реперами). 9. УЗВ приймач з перетворенням в електронний код. 10. Підсилювач. 11. Приймально-передавальний блок. На фіг. 2 показані: 12. робочий репер. 13. ГВП. Всі блоки герметично закріплені на репері та захищені пластинами. СКРВ працює наступним чином: А) В автономному режимі: 92416 4 Блок 5 має таймер и вмикає всю систему. Подає сигнал на блок 3, який генерує УЗВ сигнали і через блок 1 випромінює їх до водневої поверхні, де вони відбиваються і їх приймає блок 2 та через блок 4 з підсиленням передає виміряні данні в блок 6, в якому визначається глибина та данні перетворюються в електронний код і посилаються в блок 11. Блок 11 включає цю частину інформації в інформацію з сусідніх реперів і через блок 8 передає її на сусідній репер або ГВП. Б) В режимі запиту: ГВП подає запит на блок 9, який приймає та перетворює УЗВ сигнал на електронний код, потім через блок 10 з підсиленням передає цей сигнал на блок 5, який в свою чергу вмикає всю систему та подає сигнал на блок 3, який генерує УЗВ сигнали і через блок 1 випромінює їх до водневої поверхні, де вони відбиваються і їх приймає блок 2 та через блок 4 з підсиленням передає виміряні данні в блок 6, в якому визначається глибина та данні перетворюються в електронний код і посилаються в блок 11. Блок 11 передає цю інформацію в блок 8, який перетворює електронний код в УЗВ сигнал і передає його на сусідній репер або ГВП. Таким чином, запропонований спосіб дозволяє підвищити рівень автоматизації промірних робіт, скоротити витрати пального, матеріалів та ін. і за рахунок цього отримати суттєвий технікоекономічний ефект. Література 1. Железняков Г.В. Гидрология и гідрометрия. 2. Ворковастов К.С., Агеев М.Ф., Маркшейдерские экваториальные работы.-М.: Недра, 1986 г. 3. Васильев А.В., Шмидт С.В., Воднотехнические изыскания.-Л.:Гидрометиздат, 1970г. 4. Волосецький Б. Інженерна геодезія. Геодезичні роботи для прое-тування і будівництва водогосподарських та гідротехнічних споруд. Навчальний посібник для студентів вищих навчальних закладів. Львів, 2003р. 5 Комп’ютерна верстка В. Мацело 92416 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of water level in water reservoir
Автори англійськоюBurachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Slabak Serhii Ihorovych
Назва патенту російськоюСпособ контроля уровня воды в водоеме
Автори російськоюБурачек Всеволод Германович, Мамонтова Людмила Степановна, Слабак Сергей Игоревич
МПК / Мітки
МПК: G01F 23/28, G01F 23/296, G01F 23/00
Мітки: рівня, води, спосіб, контролю, водойми
Код посилання
<a href="https://ua.patents.su/3-92416-sposib-kontrolyu-rivnya-vodi-v-vodojjmi.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю рівня води в водоймі</a>
Пристрій контролю та автоматичного регулювання рівня напруги на шинах трансформаторної підстанції
Номер патенту: 37299
Опубліковано: 25.11.2008
Автори: Логвиненко Михайло Вікторович, Коваленко Любов Рафаїлівна, Коваленко Олександр Іванович
МПК: H02P 9/00
Мітки: підстанції, напруги, шинах, трансформаторної, контролю, регулювання, автоматичного, рівня, пристрій
Формула / Реферат:
Пристрій контролю та автоматичного регулювання рівня напруги на шинах трансформаторної підстанції, що включає блок задавання рівня стабілізованої напруги, який зв'язаний з блоком керування рівнем напруги, що включає блок перетворювачів напруги, який відрізняється тим, що має блоки контролю від недопустимого зниження та підвищення рівня регулюючої напруги, які включені у коло керування блоком регулювання напруги, котре додатково містить блок...
Спосіб заміру статичного рівня води в свердловині
Номер патенту: 30741
Опубліковано: 15.12.2000
Автори: Петросов Валерій Альбертович, Попков Віктор Володимирович, Чорний Анатолій Петрович
МПК: F04D 15/00
Мітки: свердловини, спосіб, рівня, заміру, статичного, води
Формула / Реферат:
Спосіб заміру статичного рівня води в свердловині з змонтованою в неї насосною установкою, яка складається з насоса, водопідйомного трубопроводу і обладнання гирла свердловини, що полягає у визначенні його значення по показанням приладу й побічному заміру, який відрізняється тим, що значення статичного рівня визначають, використовуючи показання штатного манометру насосної установки і паспортне значення напору насоса при його нульовій подачі...
Пристрій для контролю рівня рідини
Номер патенту: 38983
Опубліковано: 26.01.2009
Автори: Казаков Володимир Олексійович, Бабков Світозар Всеволодович, Мнухін Анатолій Григорович, Брюханов Олександр Михайлович
МПК: G01F 23/30
Мітки: рідини, рівня, контролю, пристрій
Формула / Реферат:
Пристрій для контролю рівня рідини, що містить датчик рівня рідини поплавцевого типу з пружиною, формувач електричного сигналу з автономним джерелом живлення, який відрізняється тим, що він обладнаний передавачем із вмонтованим герконом і приймачем радіосигналів з рамковими антенами, однопровідною лінією зв'язку з резисторами навантажень на кінцях лінії, а датчик рівня обладнаний магнітом.
Система контролю рівня наливу нафти та нафтопродуктів
Номер патенту: 38406
Опубліковано: 15.05.2001
Автори: Корнієнко Руслан Валерійович, Абрамов Юрій Олексійович, Дудак Сергій Олександрович
МПК: G01F 23/28
Мітки: наливу, рівня, система, нафтопродуктів, нафти, контролю
Текст:
...детектор реєстрації зміни частоти коливань 3, входить у безпосередній контакт із об'єктом вимірювань 15, сигнал від вимірювального блоку 1 поступає на блок обробки інформації 4, що передає сигнал на блок відображення інформації та управління 5, при отриманні сигналу з блоку обробки інформації 4, блок відображення інформації та управління 5 формує сигнал на шаговий реверсивний електродвигун 6, який повертає шток 7, навколо горизонтальної вісі...
Спосіб вимірювання рівня води в барабані парогенератора
Номер патенту: 28756
Опубліковано: 25.12.2007
Автори: Васильєв Валерій Матвійович, Брук Валерій Аркадійович, Борбульов Станіслав Ігоревич
МПК: G01F 23/14
Мітки: води, парогенератора, барабані, спосіб, рівня, вимірювання
Формула / Реферат:
Спосіб вимірювання рівня води в барабані парогенератора, заснований на вимірюванні різниці тисків між плюсовою і мінусовою камерами диференційного манометра, мінусова камера котрого сполучається з барабаном парогенератора на висоті, що відповідає мінімальному вимірюваному рівню води в барабані, а плюсова камера через однокамерну зрівнювальну посудину сполучається з барабаном парогенератора на висоті, що відповідає максимальному вимірюваному...
Попередній патент: Спосіб очистки води при вирощуванні риби в замкненій системі
Наступний патент: Центрифугуючий пристрій для очистки від завислих речовин у вигляді ротора
Випадковий патент: Зернозбиральний маслокомбайн