Радіолокаційна система
Номер патенту: 78187
Опубліковано: 11.03.2013
Автори: Ліпатов Валерій Павлович, Піронер Ян Михайлович, Барінгольц Тетяна Володимирівна, Торгонський Володимир Васильович, Гузь Володимир Іванович, Хоменко Микола Васильович, Білокоз Сергій Сергійович, Зайцев Анатолій Якимович, Фількевич Олександр Сергійович, Свіриденко Олександр Данилович, Малишев Олександр Олександрович, Бутирін Анатолій Вікторович

Формула / Реферат
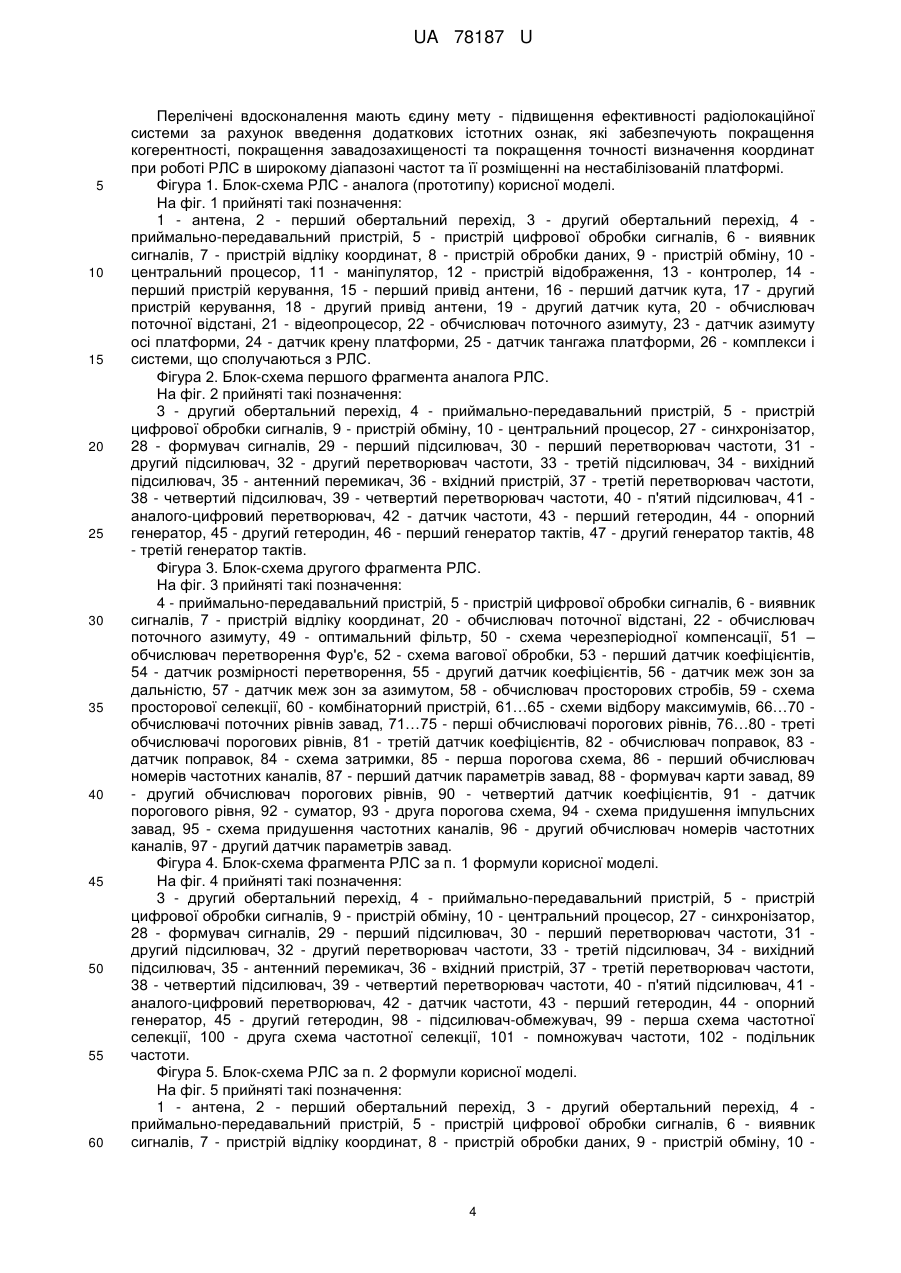
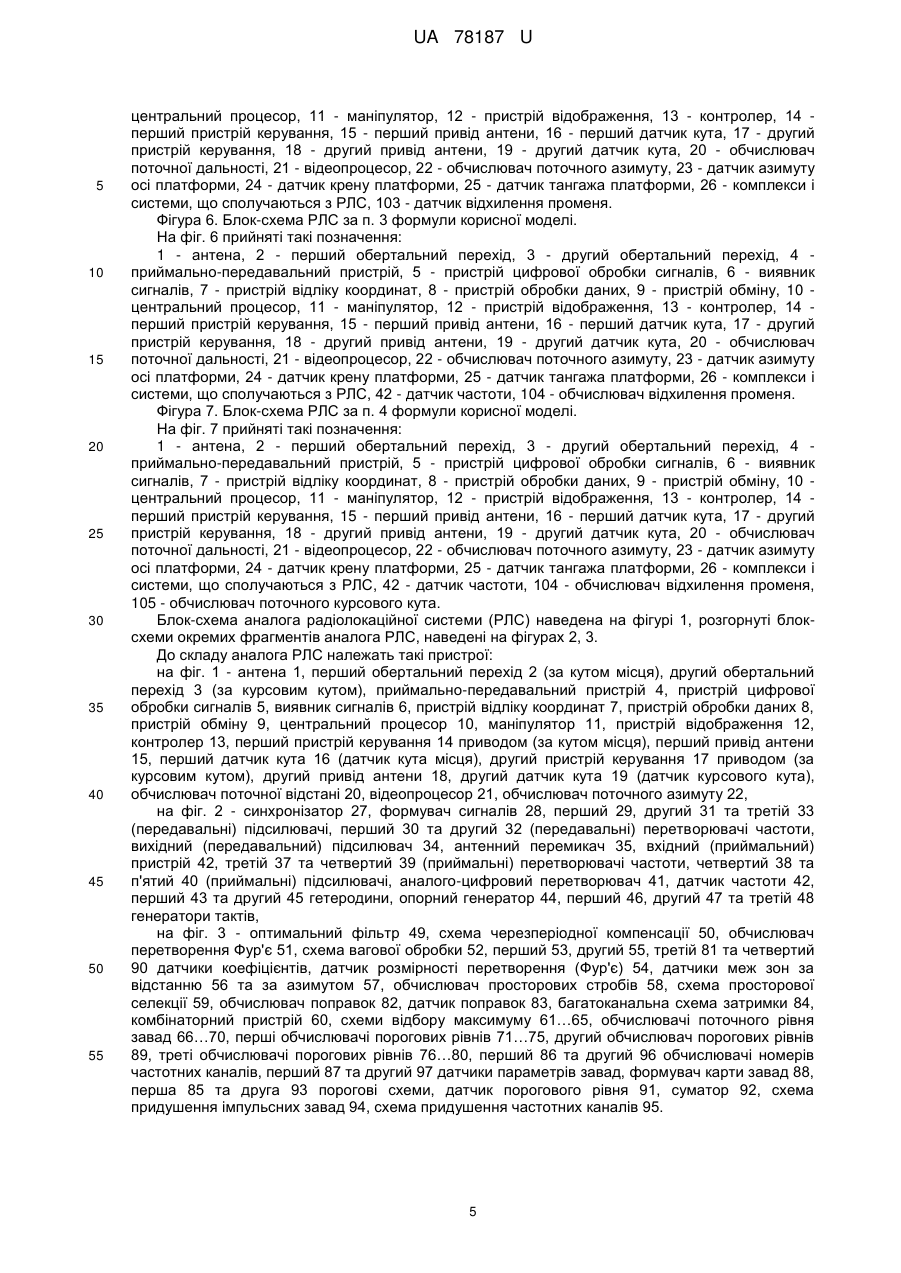
1. Радіолокаційна система, що містить антену, перший та другий обертальні переходи, перший та другий приводи антени, перший та другий пристрої керування приводами, контролер, перший та другий датчики кута, пристрій відліку координат, процесор обробки даних, пристрій обміну, центральний процесор, маніпулятор, пристрій відображення, обчислювач поточної відстані, обчислювач поточного азимуту, відеопроцесор, приймально-передавальний пристрій, що має у своєму складі опорний генератор, перший і другий гетеродини, датчик частоти, антенний перемикач, формувач сигналів, перший, другий третій і четвертий перетворювачі частоти, вихідний підсилювач, вхідний приймальний пристрій, аналого-цифровий перетворювач та синхронізатор, пристрій цифрової обробки сигналів, що має у своєму складі оптимальний фільтр, схему черезперіодної компенсації, схему перетворення Фур'є, схему вагової обробки, перший і другий датчики коефіцієнтів та датчик розмірності перетворення, датчики меж зон за дальністю та азимутом, обчислювач просторових стробів, схему просторової селекції, виявник сигналів, що має у своєму складі перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, комбінаторний пристрій, схеми відбору максимумів, обчислювачі поточних рівнів шумових завад, перші, другий та треті обчислювачі порогових рівнів, третій та четвертий датчик коефіцієнтів, датчик поправок, обчислювач поправок, схему затримки, формувач карти завад, першу та другу порогові схеми, суматор, датчик порогового рівня, схему придушення імпульсних завад, схему придушення частотних каналів, причому радіолокаційна система підключена до датчика азимуту осі платформи, датчиків крену та тангажа платформи і з'єднана з комплексами і системами, з якими таке з'єднання передбачене,
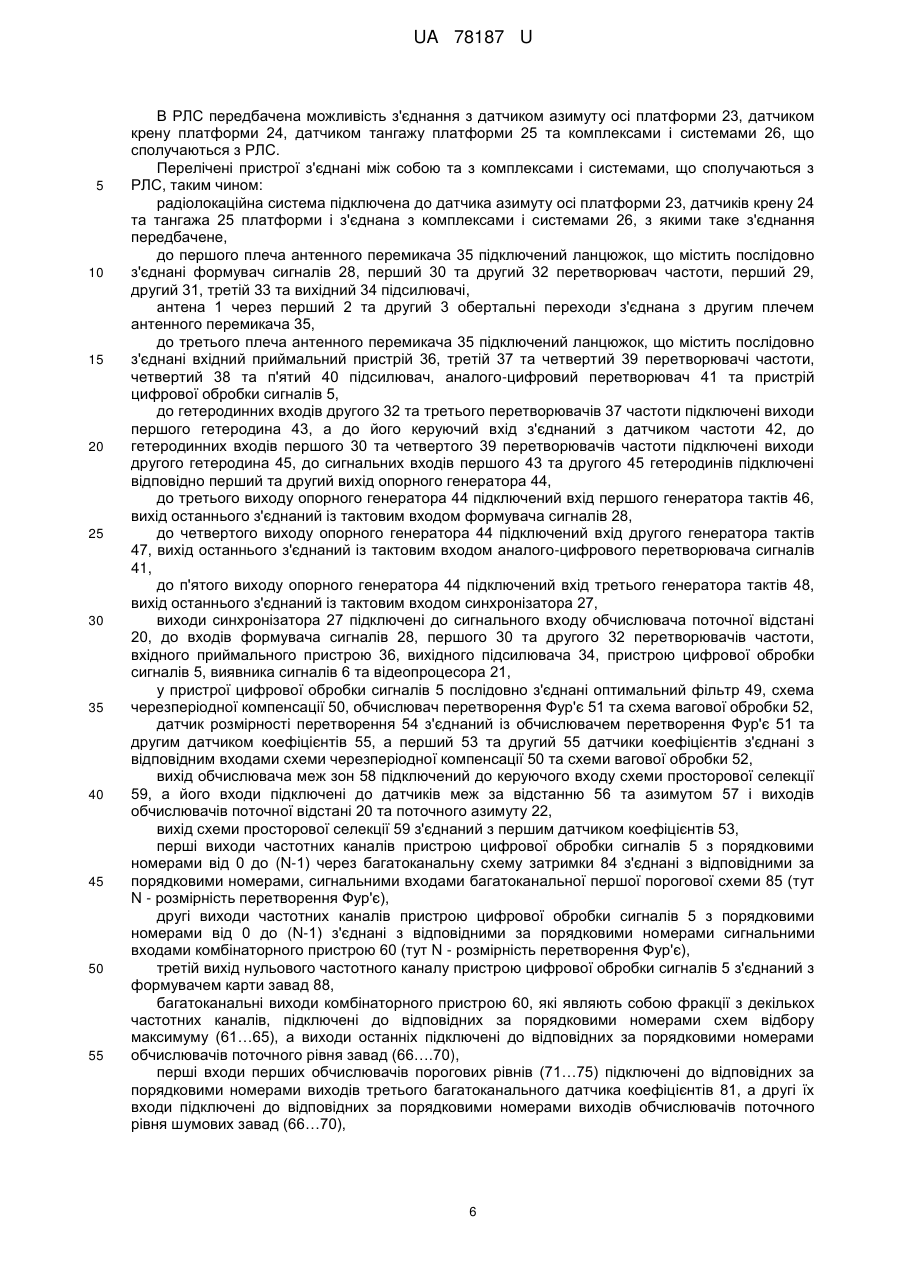
ланцюжок із послідовно з'єднаних формувача сигналів, першого та другого перетворювачів частоти і вихідного підсилювача підключений до першого плеча антенного перемикача,
антена через перший та другий обертальні переходи з'єднана з другим плечем антенного перемикача,
до третього плеча антенного перемикача підключений ланцюжок послідовно з'єднаних вхідного приймального пристрою, третього та четвертого перетворювача частоти, аналого-цифрового перетворювача та пристрою цифрової обробки сигналів,
до гетеродинних входів другого та третього перетворювачів частоти підключені виходи першого гетеродина, а його керуючий вхід з'єднаний з датчиком частоти, до гетеродинних входів першого та четвертого перетворювачів частоти підключені виходи другого гетеродина, до входів першого та другого гетеродинів підключені відповідно перший та другий вихід опорного генератора,
виходи синхронізатора підключені до сигнального входу обчислювача поточної відстані, до входів формувача сигналів, першого та другого перетворювачів частоти, вхідного приймального пристрою та вихідного підсилювача, пристрою цифрової обробки сигналів, виявника та відеопроцесора,
у пристрої цифрової обробки сигналів послідовно з'єднані оптимальний фільтр, схема черезперіодної компенсації, схема перетворення Фур'є та схема вагової обробки,
датчик розмірності перетворення з'єднаний із схемою перетворення Фур'є та другим датчиком коефіцієнтів, а перший та другий датчики коефіцієнтів з'єднані з відповідним входами схеми черезперіодної компенсації та схеми вагової обробки,
вихід обчислювача меж зон підключений до керуючого входу схеми просторової селекції, його входи підключені до датчиків меж за відстанню та азимутом і виходів обчислювачів поточної відстані та поточного азимуту, а вихід схеми просторової селекції підключений до першого датчика коефіцієнтів,
перші виходи частотних каналів пристрою цифрової обробки сигналів з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки з'єднані з відповідними за порядковими номерами сигнальними входами багатоканальної першої порогової схеми (тут N - розмірність перетворення Фур'є),
другі виходи частотних каналів пристрою цифрової обробки сигналів з порядковими номерами від 0 до (N-1) з'єднані з відповідними за порядковими номерами сигнальними входами комбінаторного пристрою (тут N - розмірність перетворення Фур'є),
третій вихід нульового частотного каналу пристрою цифрової обробки сигналів з'єднаний з формувачем карти завад,
виходи комбінаторного пристрою підключені до відповідних входів схем відбору максимуму, а виходи останніх з'єднанні із входами обчислювачів поточного рівня завад,
перші входи перших обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів другого багатоканального датчика коефіцієнтів, а другі його входи підключені до відповідних за порядковими номерами виходів обчислювачів поточного рівня шумових завад,
перші входи другого обчислювача порогових рівнів підключені до виходу формувача карти завад, а другі його входи підключені до відповідних за порядковими номерами виходів четвертого багатоканального датчика коефіцієнтів,
перші входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювача поправок, другі входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювачів перших порогових рівнів, треті входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювачів других порогових рівнів, виходи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами порогових входів багатоканальної першої порогової схеми, а входи обчислювача поправок з'єднані з датчиком поправок,
перші виходи першої порогової схеми через послідовно з'єднані схему придушення імпульсних завад та схему придушення частотних каналів підключені до входів пристрою відліку координат,
другі виходи першої порогової схеми підключені до входу суматора, вихід якого підключений до першого входу другої порогової схеми, а до другого входу останньої підключений датчик порогового рівня, вихід другої порогової схеми підключений до керуючого входу схеми придушення імпульсних завад,
входи другого обчислювача номерів частотних каналів з'єднані з другим датчиком параметрів завад, а його вихід підключений до керуючого входу схеми придушення частотних каналів,
вхід процесора обробки даних підключений до виходу пристрою відліку координат, а вихід процесора через пристрій обміну підключений до центрального процесора,
вихід першого датчика кута підключений до координатного входу пристрою відліку координат та через пристрій обміну до центрального процесора,
вхід обчислювача поточної дальності підключений до синхронізатора, а його виходи підключені до перших координатних входів відеопроцесора, виявника сигналів та пристрою відліку координат,
перший та другий входи обчислювача поточного азимуту підключені відповідно до другого датчика кута та датчика азимуту осі платформи, а його виходи підключені до других координатних входів відеопроцесора, виявника сигналів та пристрою відліку координат,
сигнальні входи відеопроцесора підключені до другого виходу схеми черезперіодної компенсації пристрою цифрової обробки сигналів та до виходу виявника сигналів,
через пристрій обміну до центрального процесора підключені маніпулятор та пристрій відображення, вихід відеопроцесора, керуючі входи приймально-передавального пристрою, пристрою цифрової обробки сигналів, виявника сигналів, пристрою відліку координат, процесора обробки даних та контролера,
вхід першого пристрою керування приводом підключений до першого виходу контролера, вихід першого пристрою керування приводом підключений до першого приводу антени, з останнім механічно зв'язаний перший датчик кута,
вхід другого пристрою керування приводом підключений до другого виходу контролера, вихід другого пристрою керування приводом підключений до другого приводу антени, з останнім механічно зв'язаний другий датчик кута,
яка відрізняється тим, що до складу радіолокаційної системи введені підсилювач-обмежувач, перша та друга схема частотної селекції, помножувач частоти та подільник частоти, причому до виходу опорного генератора підключений вхід підсилювача-обмежувача, виходи останнього з'єднані з входами першої та другої схем частотної селекції, вихід першої схеми частотної селекції підключений до входу помножувача частоти, перший вихід якого підключений до тактового входу формувача сигналів, другий вихід помножувача підключений до входу подільника частоти, вихід останнього з'єднано з тактовим входом синхронізатора, а вихід другої схеми частотної селекції підключений до тактового входу аналого-цифрового перетворювача.
2. Радіолокаційна система за п. 1, яка відрізняється тим, що до її складу введено датчик відхилення осі променя, який підключений до третього входу обчислювача поточного азимуту.
3. Радіолокаційна система за п. 1, яка відрізняється тим, що до її складу введено обчислювач відхилення осі променя, причому вхід обчислювача підключений до датчика частоти, а його вихід з'єднаний із входом обчислювача поточного азимуту.
4. Радіолокаційна система за п. 3, яка відрізняється тим, що до її складу введено обчислювач поточних координат променя антени, причому перший та другий входи обчислювача поточних координат променя антени підключені відповідно до першого та другого датчиків кута, третій його вхід підключений до виходу обчислювача відхилення осі променя антени, четвертий та п'ятий його входи через пристрій обміну підключені до датчиків крену і тангажа платформи, перший його вихід з'єднаний із входом обчислювача поточного азимуту, другий його вихід з'єднаний із входом пристрою відліку координат, а третій його вихід через пристрій обміну підключений до центрального процесора.
Текст
Реферат: Радіолокаційна система (РЛС) містить антену, перший та другий обертальні переходи, перший та другий приводи антени, перший та другий пристрої керування приводами, контролер, перший та другий датчики кута, пристрій відліку координат, пристрій обробки даних, пристрій обміну, центральний процесор, маніпулятор, пристрій відображення, обчислювач поточної відстані, обчислювач поточного азимуту, відеопроцесор, приймально-передавальний пристрій, пристрій цифрової обробки сигналів, виявник сигналів. Приймально-передавальний пристрій має у своєму складі опорний генератор, три генератора тактів, перший і другий гетеродини, датчик частоти, антенний перемикач, формувач сигналів, передавальні та приймальні підсилювачі, перший, другий третій і четвертий перетворювачі частоти, вихідний передавальний підсилювач, вхідний приймальний пристрій, аналого-цифровий перетворювач та синхронізатор. Пристрій цифрової обробки сигналів має у своєму складі оптимальний фільтр, схему черезперіодної компенсації, обчислювач перетворення Фур'є, схему вагової обробки з відповідними датчиками коефіцієнтів та датчиком розмірності перетворення, датчики меж зон за дальністю та азимутом, обчислювач просторових стробів і схему просторової селекції. Виявник сигналів має у своєму складі перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, комбінаторний пристрій, схеми відбору максимумів, обчислювачі поточних рівнів шумових завад, перші, другий та треті обчислювачі порогових рівнів, третій та четвертий датчик коефіцієнтів, датчик поправок, обчислювач поправок, схему затримки, формувач карти завад, першу та другу порогові схеми, суматор, датчик порогового рівня, схему придушення імпульсних завад, схему придушення частотних каналів. Додатково до складу виявника РЛС введено: підсилювач-обмежувач, перша UA 78187 U (12) UA 78187 U та друга схема частотної селекції, помножувач частоти та подільник частоти, та введено зв'язки між ними та іншими пристроями РЛС. UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель "Радіолокаційна система" (РЛС) належить до класу мобільних пошукових когерентно-імпульсних радіолокаційних систем, що призначені для виявлення повітряних, наземних та надводних об'єктів, вимірювання їх координат та супроводу виявлених об'єктів, визначення їх параметрів руху та видачі даних комплексам та системам, що з нею сполучаються. Радіолокаційна система може бути використана для своєчасного виявлення небажаних об'єктів в зоні відповідальності РЛС, наприклад, при охороні важливих об'єктів (електростанцій, промислових підприємств, складських приміщень тощо), та може бути встановлена стаціонарно або на мобільних транспортних засобах або на надводних суднах. Особливостями запропонованої РЛС є таке: випромінювання сигналів малої потужності, що забезпечує енергозбереження та зменшує екологічну шкоду навколишньому середовищу; використання високоефективних методів цифрового формування та цифрової обробки радіолокаційних сигналів та радіолокаційних даних; висока надійність та безпечність експлуатації за рахунок широкого використання цифрових процесорів, мікроелектронних елементів високого ступеня інтеграції та потужних НВЧ напівпровідникових елементів; висока когерентність для забезпечення ефективного придушення пасивних завад природного та штучного походження. Відомі трикоординатні радіолокаційні станції AN/SPS-48, AN/SPS-52 (USA) (Jane's Weapon Systems 1987-88, pp. 686-687), "Фрегат-МАЄ" (Росія) (Военный парад, 1997, № 5, ст. 94-96; Военный парад, 1998, № 6, ст. 60-61) та РЛС за деклараційним патентом України 43975 А від 15.01.2002 року, які здійснюють пошук та виявлення цілей та видачу даних комплексам та системам, що з ними сполучаються. Пошук такими РЛС по азимуту здійснюється шляхом механічного обертання антени навколо вертикальної осі, а по куту місця - за рахунок електронного сканування променем шляхом зміни несучої частоти або несучої частоти та фази випромінюваних зондувальних сигналів. Антенні пристрої перелічених систем являють собою ряд лінійних хвилевідно-щілинних випромінювачів. Випромінювачі живляться через відгалуження від хвилевідної уповільнюючої системи безпосередньо або через фазообертачі з електронним управлінням. Відома також радіолокаційна система ASR-9 з цифровим виявником рухомих цілей ("Применение цифровой обработки сигналов". Переклад з англійської під редакцією А.М. Рязанцева. Москва, видавництво "Мир", 1980, стор. 346-351, а також ТИИЭР, т. 73, № 2, лютий 1985), який має у своєму складі послідовно включені комплексний аналого-цифровий перетворювач, оперативну буферну пам'ять, комплексний трьох-імпульсний черезперіодний компенсатор, пристрій восьмиточкового швидкого перетворення Фур'є, пристрій розрахунку обвідної сигналу, пристрій порогового аналізу, а також фільтр нульової швидкості, рекурсивний фільтр формування карти завад та запам'ятовуючий пристрій карти завад. РЛС працює почергово на двох частотах повторювання зондувань. Прийняті сигнали на кожній частоті повторювання обробляються окремо. Спочатку випромінюються 10 зондувальних сигналів на першій частоті повторювання. Прийняті сигнали зазнають аналого-цифрового перетворення у двох квадратурних каналах до відеосмуги частот і запам'ятовуються в буферній пам'яті. Прочитані з буферної пам'яті відліки сигналів надходять до входів квадратурних каналів трьох-імпульсного компенсатора пасивних завад та фільтра нульової швидкості. З виходу компенсатора відліки сигналів піддаються восьми-точковому швидкому перетворенню Фур'є. Для зменшення бічних пелюсток у частотному просторі використовується вагова обробка сигналів, при якій з відліків вихідних сигналів кожного частотного каналу віднімаються відповідні частки відліків у суміжних частотних каналах. В кожному частотному каналі, розраховується обвідна сигналу, а її відліки порівнюються у пороговому пристрої з розрахованим пороговим рівнем. При перевищенні порогового рівня формується одиничний імпульс, який передається в пристрій обробки даних. Пороговий рівень враховує середній рівень завад у відповідному елементі розрізнення радіолокаційної карти завад. Для побудови радіолокаційної карти завад від місцевих предметів використовується рекурсивна фільтрація. Реєстрація рівня завад жорстко прив'язується до координат "курсовий кут антени - віддаль від РЛС". При кожному поточному огляді одна восьма вихідних відліків фільтра нульової швидкості додається до семи восьмих вже накопичених відліків карти завад. Стале середнє значення відліків карти завад формується за 10-20 оглядів. Для підвищення точності використовується 1 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 досить дрібна сітка елементів розрізнення карти завад. Відліки карти завад множать на константу та використовують при формуванні порогових рівнів в кожному частотному каналі. Для фільтра нульової швидкості константа дорівнює 4-8, для інших частотних каналів константи відповідно змінюються. Потім випромінюються 8 зондувальних сигналів на другій частоті повторювання. Прийняті сигнали зазнають обробки, яка аналогічна обробці при випромінюванні 10 зондувальних сигналів на першій частоті повторювання. Такий режим випромінювання й обробки сигналів безперервно повторюється. Недоліками РЛС є складність антенних систем, велика потужність випромінюваних сигналів, велика вартість, велика споживана енергія від джерел електропостачання. Все це обмежує можливості розміщення РЛС на мобільних засобах пересування. Найбільш близькою за технічною суттю до запропонованого винаходу є РЛС за патентом України № UA 19788 U від 15.12.2006 р. з пріоритетом від 06.10.2006 року, яка вибрана як аналог з деякими уточненнями. До складу аналога корисної моделі належать такі суттєві пристрої: антена, перший та другий обертальні переходи, перший та другий приводи антени, перший та другий пристрої керування приводами, контролер, перший та другий датчики кута, пристрій відліку координат, процесор обробки даних, пристрій обміну, центральний процесор, маніпулятор, пристрій відображення, обчислювач поточної відстані, обчислювач поточного азимуту, відеопроцесор, приймально-передавальний пристрій, пристрій цифрової обробки сигналів, виявник сигналів. Приймально-передавальний пристрій має у своєму складі опорний генератор, три генератора тактів, перший і другий гетеродини, датчик частоти, антенний перемикач, формувач сигналів, передавальні та приймальні підсилювачі, перший, другий третій і четвертий перетворювачі частоти, вихідний передавальний підсилювач, вхідний приймальний пристрій, аналого-цифровий перетворювач та синхронізатор. Пристрій цифрової обробки сигналів має у своєму складі оптимальний фільтр, схему черезперіодної компенсації, схему перетворення Фур'є, схему вагової обробки з відповідними датчиками коефіцієнтів та датчиком розмірності перетворення, датчики меж зон за дальністю та азимутом, обчислювач просторових стробів і схему просторової селекції. Виявник сигналів має у своєму складі перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, комбінаторний пристрій, схеми відбору максимумів, обчислювачі поточних рівнів шумових завад, перші, другий та треті обчислювачі порогових рівнів, третій та четвертий датчик коефіцієнтів, датчик поправок, обчислювач поправок, схему затримки, формувач карти завад, першу та другу порогові схеми, суматор, датчик порогового рівня, схему придушення імпульсних завад, схему придушення частотних каналів. Пошук по азимуту ведеться шляхом механічного обертання антени навколо вертикальної осі, пошук по куту місця здійснюється за рахунок механічної зміни кута місця осі променя антени. Прийняті сигнали зазнають когерентної обробки, накопичуються та порівнюються з програмно встановленим пороговим рівнем. З виявлених сигналів формуються позначки об'єктів та визначаються їх координати. Координати виявлених позначок передаються до пристрою вторинної обробки (процесору обробки даних), де виявлені об'єкти беруться на супровід, а їх координати згладжуються та екстраполюються для забезпечення визначення поточних координат та параметрів руху об'єктів, що супроводжуються. Отримані дані видаються комплексам і системам, що сполучаються з РЛС, та відображаються на екранах індикаторів разом з первинною радіолокаційною обстановкою. Аналогу (прототипу) корисної моделі притаманні деякі суттєві недоліки, які істотно обмежують їх ефективність: Недостатньо висока взаємна когерентність генераторів тактів, що призводить до обмеження спроможності РЛС виділяти рухомі цілі на тлі інтенсивних пасивних завад. Підвищені похибки визначення координат цілей через відхилення осі променя від осі антени. Підвищені похибки визначення координат цілей при відхиленні площини платформи від горизонтальної площини. Технічною задачею запропонованого корисної моделі є усунення перелічених недоліків та істотне покращення характеристик радіолокаційної системи. Для вирішення цієї задачі пропонується використати нові додаткові істотні ознаки шляхом введення до складу РЛС певних пристроїв та забезпечення відповідних зв'язків між ними. 2 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 В основу запропонованої корисної моделі покладено новий принцип формування коливань основних тактових частот, який суттєво підвищує когерентність коливань і, як наслідок, покращує придушення пасивних завад. Крім того, забезпечується істотне підвищення точності вимірювання координат за рахунок акуратного врахування поточного положення осі променя антени у просторі при роботі РЛС в широкому діапазоні частот та при розміщенні РЛС на нестабілізованій платформі. Відповідно до пункту 1 формули корисної моделі підвищення ефективності РЛС забезпечується за рахунок покращення когерентності та синхронізації коливань генераторів тактів для формування та обробки зондувальних сигналів. Запропонована РЛС містить такі пристрої, аналогічні пристроям аналога: антену, перший та другий обертальні переходи, перший та другий приводи антени, перший та другий пристрої керування приводами, контролер, перший та другий датчики кута, пристрій відліку координат, пристрій обробки даних, пристрій обміну, центральний процесор, маніпулятор, пристрій відображення, обчислювач поточної відстані, обчислювач поточного азимуту, відеопроцесор, приймально-передавальний пристрій, пристрій цифрової обробки сигналів, виявник сигналів. Приймально-передавальний пристрій має у своєму складі опорний генератор, три генератора тактів, перший і другий гетеродини, датчик частоти, антенний перемикач, формувач сигналів, передавальні та приймальні підсилювачі, перший, другий третій і четвертий перетворювачі частоти, вихідний передавальний підсилювач, вхідний приймальний пристрій, аналого-цифровий перетворювач та синхронізатор. Пристрій цифрової обробки сигналів має у своєму складі оптимальний фільтр, схему черезперіодної компенсації, обчислювач перетворення Фур'є, схему вагової обробки з відповідними датчиками коефіцієнтів та датчиком розмірності перетворення, датчики меж зон за дальністю та азимутом, обчислювач просторових стробів і схему просторової селекції. Виявник сигналів має у своєму складі перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, комбінаторний пристрій, схеми відбору максимумів, обчислювачі поточних рівнів шумових завад, перші, другий та треті обчислювачі порогових рівнів, третій та четвертий датчик коефіцієнтів, датчик поправок, обчислювач поправок, схему затримки, формувач карти завад, першу та другу порогові схеми, суматор, датчик порогового рівня, схему придушення імпульсних завад, схему придушення частотних каналів. Поставлена задача вирішується тим, що до складу виявника РЛС введено такі додаткові пристрої: підсилювач-обмежувач, перша та друга схема частотної селекції, помножувач частоти та подільник частоти, та введено такі зв'язки між ними та іншими пристроями РЛС: до виходу опорного генератора підключений вхід підсилювача-обмежувача, виходи останнього з'єднані з входами першої та другої схем частотної селекції, вихід першої схеми частотної селекції підключений до входу помножувача частоти, перший вихід якого підключений до тактового входу формувача сигналів, другий вихід помножувача підключений до входу подільника частоти, вихід останнього з'єднано з тактовим входом синхронізатора, а вихід другої схеми частотної селекції підключений до тактового входу аналого-цифрового перетворювача. Використання сукупності перелічених істотних ознак дозволяє суттєво покращити когерентність коливань основних тактових частот, а підвищена когерентність коливань основних тактових частот зумовлює істотне покращення придушення пасивних завад. Підвищення точності вимірювання координат виявлених об'єктів згідно з п. 2 формули корисної моделі досягається тим, що до складу РЛС додатково введено датчик відхилення осі променя, який підключений до третього входу обчислювача поточного азимуту. Підвищення точності вимірювання координат виявлених об'єктів при роботі в широкому діапазоні частот згідно з п. 3 формули корисної моделі досягається тим, що до складу РЛС введено обчислювач відхилення осі променя, причому вхід обчислювача підключений до датчика частоти, а його вихід з'єднаний із входом обчислювача поточного азимуту. Підвищення точності вимірювання координат виявлених об'єктів при роботі на нестабілізованій платформі згідно з п. 4 формули корисної моделі досягається тим, що до складу РЛС введено обчислювач поточних координат променя антени, причому перший його вихід з'єднаний із входом обчислювача поточного азимуту, другий його вихід через пристрій обміну підключений до центрального процесора, а входи обчислювача поточних координат променя антени підключені до виходу обчислювача відхилення осі променя та через пристрій обміну до датчиків крену і тангажа платформи. 3 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 Перелічені вдосконалення мають єдину мету - підвищення ефективності радіолокаційної системи за рахунок введення додаткових істотних ознак, які забезпечують покращення когерентності, покращення завадозахищеності та покращення точності визначення координат при роботі РЛС в широкому діапазоні частот та її розміщенні на нестабілізованій платформі. Фігура 1. Блок-схема РЛС - аналога (прототипу) корисної моделі. На фіг. 1 прийняті такі позначення: 1 - антена, 2 - перший обертальний перехід, 3 - другий обертальний перехід, 4 приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 6 - виявник сигналів, 7 - пристрій відліку координат, 8 - пристрій обробки даних, 9 - пристрій обміну, 10 центральний процесор, 11 - маніпулятор, 12 - пристрій відображення, 13 - контролер, 14 перший пристрій керування, 15 - перший привід антени, 16 - перший датчик кута, 17 - другий пристрій керування, 18 - другий привід антени, 19 - другий датчик кута, 20 - обчислювач поточної відстані, 21 - відеопроцесор, 22 - обчислювач поточного азимуту, 23 - датчик азимуту осі платформи, 24 - датчик крену платформи, 25 - датчик тангажа платформи, 26 - комплекси і системи, що сполучаються з РЛС. Фігура 2. Блок-схема першого фрагмента аналога РЛС. На фіг. 2 прийняті такі позначення: 3 - другий обертальний перехід, 4 - приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 9 - пристрій обміну, 10 - центральний процесор, 27 - синхронізатор, 28 - формувач сигналів, 29 - перший підсилювач, 30 - перший перетворювач частоти, 31 другий підсилювач, 32 - другий перетворювач частоти, 33 - третій підсилювач, 34 - вихідний підсилювач, 35 - антенний перемикач, 36 - вхідний пристрій, 37 - третій перетворювач частоти, 38 - четвертий підсилювач, 39 - четвертий перетворювач частоти, 40 - п'ятий підсилювач, 41 аналого-цифровий перетворювач, 42 - датчик частоти, 43 - перший гетеродин, 44 - опорний генератор, 45 - другий гетеродин, 46 - перший генератор тактів, 47 - другий генератор тактів, 48 - третій генератор тактів. Фігура 3. Блок-схема другого фрагмента РЛС. На фіг. 3 прийняті такі позначення: 4 - приймально-передавальний пристрій, 5 - пристрій цифровоїобробки сигналів, 6 - виявник сигналів, 7 - пристрій відліку координат, 20 - обчислювач поточної відстані, 22 - обчислювач поточного азимуту, 49 - оптимальний фільтр, 50 - схема черезперіодної компенсації, 51 – обчислювач перетворення Фур'є, 52 - схема вагової обробки, 53 - перший датчик коефіцієнтів, 54 - датчик розмірності перетворення, 55 - другий датчик коефіцієнтів, 56 - датчик меж зон за дальністю, 57 - датчик меж зон за азимутом, 58 - обчислювач просторових стробів, 59 - схема просторової селекції, 60 - комбінаторний пристрій, 61…65 - схеми відбору максимумів, 66…70 обчислювачі поточних рівнів завад, 71…75 - перші обчислювачі порогових рівнів, 76…80 - треті обчислювачі порогових рівнів, 81 - третій датчик коефіцієнтів, 82 - обчислювач поправок, 83 датчик поправок, 84 - схема затримки, 85 - перша порогова схема, 86 - перший обчислювач номерів частотних каналів, 87 - перший датчик параметрів завад, 88 - формувач карти завад, 89 - другий обчислювач порогових рівнів, 90 - четвертий датчик коефіцієнтів, 91 - датчик порогового рівня, 92 - суматор, 93 - друга порогова схема, 94 - схема придушення імпульсних завад, 95 - схема придушення частотних каналів, 96 - другий обчислювач номерів частотних каналів, 97 - другий датчик параметрів завад. Фігура 4. Блок-схема фрагмента РЛС за п. 1 формули корисної моделі. На фіг. 4 прийняті такі позначення: 3 - другий обертальний перехід, 4 - приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 9 - пристрій обміну, 10 - центральний процесор, 27 - синхронізатор, 28 - формувач сигналів, 29 - перший підсилювач, 30 - перший перетворювач частоти, 31 другий підсилювач, 32 - другий перетворювач частоти, 33 - третій підсилювач, 34 - вихідний підсилювач, 35 - антенний перемикач, 36 - вхідний пристрій, 37 - третій перетворювач частоти, 38 - четвертий підсилювач, 39 - четвертий перетворювач частоти, 40 - п'ятий підсилювач, 41 аналого-цифровий перетворювач, 42 - датчик частоти, 43 - перший гетеродин, 44 - опорний генератор, 45 - другий гетеродин, 98 - підсилювач-обмежувач, 99 - перша схема частотної селекції, 100 - друга схема частотної селекції, 101 - помножувач частоти, 102 - подільник частоти. Фігура 5. Блок-схема РЛС за п. 2 формули корисної моделі. На фіг. 5 прийняті такі позначення: 1 - антена, 2 - перший обертальний перехід, 3 - другий обертальний перехід, 4 приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 6 - виявник сигналів, 7 - пристрій відліку координат, 8 - пристрій обробки даних, 9 - пристрій обміну, 10 4 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 центральний процесор, 11 - маніпулятор, 12 - пристрій відображення, 13 - контролер, 14 перший пристрій керування, 15 - перший привід антени, 16 - перший датчик кута, 17 - другий пристрій керування, 18 - другий привід антени, 19 - другий датчик кута, 20 - обчислювач поточної дальності, 21 - відеопроцесор, 22 - обчислювач поточного азимуту, 23 - датчик азимуту осі платформи, 24 - датчик крену платформи, 25 - датчик тангажа платформи, 26 - комплекси і системи, що сполучаються з РЛС, 103 - датчик відхилення променя. Фігура 6. Блок-схема РЛС за п. 3 формули корисної моделі. На фіг. 6 прийняті такі позначення: 1 - антена, 2 - перший обертальний перехід, 3 - другий обертальний перехід, 4 приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 6 - виявник сигналів, 7 - пристрій відліку координат, 8 - пристрій обробки даних, 9 - пристрій обміну, 10 центральний процесор, 11 - маніпулятор, 12 - пристрій відображення, 13 - контролер, 14 перший пристрій керування, 15 - перший привід антени, 16 - перший датчик кута, 17 - другий пристрій керування, 18 - другий привід антени, 19 - другий датчик кута, 20 - обчислювач поточної дальності, 21 - відеопроцесор, 22 - обчислювач поточного азимуту, 23 - датчик азимуту осі платформи, 24 - датчик крену платформи, 25 - датчик тангажа платформи, 26 - комплекси і системи, що сполучаються з РЛС, 42 - датчик частоти, 104 - обчислювач відхилення променя. Фігура 7. Блок-схема РЛС за п. 4 формули корисної моделі. На фіг. 7 прийняті такі позначення: 1 - антена, 2 - перший обертальний перехід, 3 - другий обертальний перехід, 4 приймально-передавальний пристрій, 5 - пристрій цифрової обробки сигналів, 6 - виявник сигналів, 7 - пристрій відліку координат, 8 - пристрій обробки даних, 9 - пристрій обміну, 10 центральний процесор, 11 - маніпулятор, 12 - пристрій відображення, 13 - контролер, 14 перший пристрій керування, 15 - перший привід антени, 16 - перший датчик кута, 17 - другий пристрій керування, 18 - другий привід антени, 19 - другий датчик кута, 20 - обчислювач поточної дальності, 21 - відеопроцесор, 22 - обчислювач поточного азимуту, 23 - датчик азимуту осі платформи, 24 - датчик крену платформи, 25 - датчик тангажа платформи, 26 - комплекси і системи, що сполучаються з РЛС, 42 - датчик частоти, 104 - обчислювач відхилення променя, 105 - обчислювач поточного курсового кута. Блок-схема аналога радіолокаційної системи (РЛС) наведена на фігурі 1, розгорнуті блоксхеми окремих фрагментів аналога РЛС, наведені на фігурах 2, 3. До складу аналога РЛС належать такі пристрої: на фіг. 1 - антена 1, перший обертальний перехід 2 (за кутом місця), другий обертальний перехід 3 (за курсовим кутом), приймально-передавальний пристрій 4, пристрій цифрової обробки сигналів 5, виявник сигналів 6, пристрій відліку координат 7, пристрій обробки даних 8, пристрій обміну 9, центральний процесор 10, маніпулятор 11, пристрій відображення 12, контролер 13, перший пристрій керування 14 приводом (за кутом місця), перший привід антени 15, перший датчик кута 16 (датчик кута місця), другий пристрій керування 17 приводом (за курсовим кутом), другий привід антени 18, другий датчик кута 19 (датчик курсового кута), обчислювач поточної відстані 20, відеопроцесор 21, обчислювач поточного азимуту 22, на фіг. 2 - синхронізатор 27, формувач сигналів 28, перший 29, другий 31 та третій 33 (передавальні) підсилювачі, перший 30 та другий 32 (передавальні) перетворювачі частоти, вихідний (передавальний) підсилювач 34, антенний перемикач 35, вхідний (приймальний) пристрій 42, третій 37 та четвертий 39 (приймальні) перетворювачі частоти, четвертий 38 та п'ятий 40 (приймальні) підсилювачі, аналого-цифровий перетворювач 41, датчик частоти 42, перший 43 та другий 45 гетеродини, опорний генератор 44, перший 46, другий 47 та третій 48 генератори тактів, на фіг. 3 - оптимальний фільтр 49, схема черезперіодної компенсації 50, обчислювач перетворення Фур'є 51, схема вагової обробки 52, перший 53, другий 55, третій 81 та четвертий 90 датчики коефіцієнтів, датчик розмірності перетворення (Фур'є) 54, датчики меж зон за відстанню 56 та за азимутом 57, обчислювач просторових стробів 58, схема просторової селекції 59, обчислювач поправок 82, датчик поправок 83, багатоканальна схема затримки 84, комбінаторний пристрій 60, схеми відбору максимуму 61…65, обчислювачі поточного рівня завад 66…70, перші обчислювачі порогових рівнів 71…75, другий обчислювач порогових рівнів 89, треті обчислювачі порогових рівнів 76…80, перший 86 та другий 96 обчислювачі номерів частотних каналів, перший 87 та другий 97 датчики параметрів завад, формувач карти завад 88, перша 85 та друга 93 порогові схеми, датчик порогового рівня 91, суматор 92, схема придушення імпульсних завад 94, схема придушення частотних каналів 95. 5 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 В РЛС передбачена можливість з'єднання з датчиком азимуту осі платформи 23, датчиком крену платформи 24, датчиком тангажу платформи 25 та комплексами і системами 26, що сполучаються з РЛС. Перелічені пристрої з'єднані між собою та з комплексами і системами, що сполучаються з РЛС, таким чином: радіолокаційна система підключена до датчика азимуту осі платформи 23, датчиків крену 24 та тангажа 25 платформи і з'єднана з комплексами і системами 26, з якими таке з'єднання передбачене, до першого плеча антенного перемикача 35 підключений ланцюжок, що містить послідовно з'єднані формувач сигналів 28, перший 30 та другий 32 перетворювач частоти, перший 29, другий 31, третій 33 та вихідний 34 підсилювачі, антена 1 через перший 2 та другий 3 обертальні переходи з'єднана з другим плечем антенного перемикача 35, до третього плеча антенного перемикача 35 підключений ланцюжок, що містить послідовно з'єднані вхідний приймальний пристрій 36, третій 37 та четвертий 39 перетворювачі частоти, четвертий 38 та п'ятий 40 підсилювач, аналого-цифровий перетворювач 41 та пристрій цифрової обробки сигналів 5, до гетеродинних входів другого 32 та третього перетворювачів 37 частоти підключені виходи першого гетеродина 43, а до його керуючий вхід з'єднаний з датчиком частоти 42, до гетеродинних входів першого 30 та четвертого 39 перетворювачів частоти підключені виходи другого гетеродина 45, до сигнальних входів першого 43 та другого 45 гетеродинів підключені відповідно перший та другий вихід опорного генератора 44, до третього виходу опорного генератора 44 підключений вхід першого генератора тактів 46, вихід останнього з'єднаний із тактовим входом формувача сигналів 28, до четвертого виходу опорного генератора 44 підключений вхід другого генератора тактів 47, вихід останнього з'єднаний із тактовим входом аналого-цифрового перетворювача сигналів 41, до п'ятого виходу опорного генератора 44 підключений вхід третього генератора тактів 48, вихід останнього з'єднаний із тактовим входом синхронізатора 27, виходи синхронізатора 27 підключені до сигнального входу обчислювача поточної відстані 20, до входів формувача сигналів 28, першого 30 та другого 32 перетворювачів частоти, вхідного приймального пристрою 36, вихідного підсилювача 34, пристрою цифрової обробки сигналів 5, виявника сигналів 6 та відеопроцесора 21, у пристрої цифрової обробки сигналів 5 послідовно з'єднані оптимальний фільтр 49, схема черезперіодної компенсації 50, обчислювач перетворення Фур'є 51 та схема вагової обробки 52, датчик розмірності перетворення 54 з'єднаний із обчислювачем перетворення Фур'є 51 та другим датчиком коефіцієнтів 55, а перший 53 та другий 55 датчики коефіцієнтів з'єднані з відповідним входами схеми черезперіодної компенсації 50 та схеми вагової обробки 52, вихід обчислювача меж зон 58 підключений до керуючого входу схеми просторової селекції 59, а його входи підключені до датчиків меж за відстанню 56 та азимутом 57 і виходів обчислювачів поточної відстані 20 та поточного азимуту 22, вихід схеми просторової селекції 59 з'єднаний з першим датчиком коефіцієнтів 53, перші виходи частотних каналів пристрою цифрової обробки сигналів 5 з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки 84 з'єднані з відповідними за порядковими номерами, сигнальними входами багатоканальної першої порогової схеми 85 (тут N - розмірність перетворення Фур'є), другі виходи частотних каналів пристрою цифрової обробки сигналів 5 з порядковими номерами від 0 до (N-1) з'єднані з відповідними за порядковими номерами сигнальними входами комбінаторного пристрою 60 (тут N - розмірність перетворення Фур'є), третій вихід нульового частотного каналу пристрою цифрової обробки сигналів 5 з'єднаний з формувачем карти завад 88, багатоканальні виходи комбінаторного пристрою 60, які являють собою фракції з декількох частотних каналів, підключені до відповідних за порядковими номерами схем відбору максимуму (61…65), а виходи останніх підключені до відповідних за порядковими номерами обчислювачів поточного рівня завад (66….70), перші входи перших обчислювачів порогових рівнів (71…75) підключені до відповідних за порядковими номерами виходів третього багатоканального датчика коефіцієнтів 81, а другі їх входи підключені до відповідних за порядковими номерами виходів обчислювачів поточного рівня шумових завад (66…70), 6 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 перші входи другого обчислювача порогових рівнів 89 підключені до виходу формувача карти завад 88, а другі його входи підключені до відповідних за порядковими номерами виходів четвертого багатоканального датчика коефіцієнтів 90, перші входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювача поправок 82, другі входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювачів перших порогових рівнів (71…75), треті входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювача других порогових рівнів 89, виходи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами порогових входів багатоканальної першої порогової схеми 85, а входи обчислювача поправок 82 з'єднані з датчиком поправок 83, перші виходи першої порогової схеми 85 через послідовно з'єднані схему придушення імпульсних завад 94 та схему придушення частотних каналів 95 підключені до входів пристрою відліку координат 7, другі виходи першої порогової схеми 85 підключені до входу суматора 92, вихід якого підключений до першого входу другої порогової схеми 93, а до другого входу останньої підключений датчик порогового рівня 91, вихід другої порогової схеми 93 підключений до керуючого входу схеми придушення імпульсних завад 94, вхід другого обчислювача номерів частотних каналів 96 з'єднаний з другим датчиком параметрів завад 97, а вихід другого обчислювача номерів частотних каналів 96 підключений до керуючого входу схеми придушення частотних каналів 95, вхід пристрою обробки даних 8 підключений до виходу пристрою відліку координат 7, а його вихід через пристрій обміну 9 підключений до центрального процесора 10, вхід першого пристрою керування приводом 14 підключений до першого виходу контролера 13, вихід першого пристрою керування приводом 14 підключений до першого приводу антени 15, з останнім механічно зв'язаний перший датчик кута 16, вхід другого пристрою керування приводом 17 підключений до другого виходу контролера 13, вихід другого пристрою керування приводом 17 підключений до другого приводу антени 18, з останнім механічно зв'язаний другий датчик кута 19, вихід першого датчика кута 16 підключений до координатного входу пристрою відліку координат 7 та через пристрій обміну 9 до центрального процесора 10, вхід обчислювача поточної дальності 20 підключений до синхронізатора 27 приймальнопередавального пристрою 4, а виходи обчислювача поточної дальності 20 підключені до перших координатних входів відеопроцесора 21, виявника сигналів 6 та пристрою відліку координат 7, перший та другий входи обчислювача поточного азимуту 22 підключені відповідно до другого датчика кута 19 та через пристрій обміну 9 до датчика азимуту осі платформи 23, а виходи обчислювача поточного азимуту 22 підключені до других координатних входів відео процесора 21, виявника сигналів 6 та пристрою відліку координат 7, сигнальні входи відеопроцесора 21 підключені до другого виходу схеми черезперіодної компенсації 50 пристрою цифрової обробки сигналів 5 та до виходу виявника сигналів 6, до центрального процесора 10 через пристрій обміну 9 підключені маніпулятор 11, пристрій відображення 12, вихід відео процесора 21, а також керуючі входи приймально-передавального пристрою 4, пристрою цифрової обробки сигналів 5, виявника сигналів 6, пристрою відліку координат 7, процесора обробки даних 8 та контролера 13. Пошук по курсовому куту ведеться шляхом механічного обертання антени навколо вертикальної осі, пошук по куту місця здійснюється за рахунок механічної зміни кута місця осі променя антени. Команди на режими обертання антени по курсовому куту та поворот антени по куту місця надходять до контролера 13 від центрального процесора 10 через процесор обміну 9. Контролер 13 керує пристроями управління приводами антени 14 та 17, а останні управляють приводами антени по куту місця 15 та по курсовому куту 18. З приводами антени механічно зв'язані датчики кута місця 16 та курсового кута 19. Дані від першого датчика кута 16 надходять до пристрою відліку координат 7 та до центрального процесора 10 для прив'язки координат виявлених цілей за кутом місця. Дані від другого датчика кута 19 надходять до першого входу обчислювача поточного азимуту 22 осі променя антени. До другого входу обчислювача поточного азимуту 22 надходять дані від датчика азимуту осі платформи. Поточний азимут обчислюється за формулою: Az=KK+K, (1) 7 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 де Az - азимут осі променя - кут між вертикальними площинами, які проходять через вісь променя та напрямок на північ, K - курс платформи - кут між вертикальними площинами, які проходять через вісь платформи та напрямок на північ, KK - курсовий кут променя в земних координатах - кут між вертикальними площинами, які проходять через вісь платформи та вісь променя. Опорний генератор створює високо стабільні синусоїдальні коливання, наприклад, з частотою 10 МГц. Ці коливання надходять до першого 46, другого 47 та третього 48 генераторів тактів. Перший генератор тактів 46 формує тактові коливання для формувача зондувальних сигналів 28. Частота таких коливань, наприклад, може дорівнювати 300 МГц. Як генератор тактів 46 можна використати помножувач частоти опорного генератора 44. Другий генератор тактів 47 формує тактові коливання для аналого-цифрового перетворення прийнятих сигналів. Частота таких коливань, наприклад, може дорівнювати 40 МГц. Як такий генератор можна використати помножувач частоти опорного генератора 44. Третій генератор тактів 48 формує коливання для тактування синхронізатора 27, які використовуються для синхронізації усіх імпульсів запуску та для тактування первинної обробки сигналів. Частота таких коливань, наприклад, може дорівнювати 5 або 10 МГц. Коливання третьої тактової частоти формуються з коливань першої тактової частоти шляхом поділу частоти або прямим використанням коливань опорного генератора 44. Зондувальні сигнали створюються формувачем зондувальних сигналів 28 на першій піднесучій частоті, яка дорівнює другій проміжній частоті при прийомі сигналів. Формування сигналів провадиться цифровим синтезатором, наприклад типу AD9852. В такому разі тип сигналу та його параметри задаються програмно. Як тактову частоту використовуються вихідні сигнали першого генератора тактів 46. Створені сигнали фільтруються та підсилюються першим передавальним підсилювачем 29, потім першим передавальним перетворювачем частоти 30 переносяться на другу піднесучу частоту, яка дорівнює першій проміжній частоті при прийомі сигналів, фільтруються та підсилюються другим передавальним підсилювачем 31, переносяться на несучу частоту РЛС другим передавальним перетворювачем частоти 32, фільтруються та підсилюються третім 33 та вихідним 34 передавальними підсилювачами, надходять до першого плеча антенного перемикача 35 і далі через обертальні переходи по курсовому куту 3 та куту місця 2 надходять до антени 1. Антена 1 забезпечує спрямоване випромінювання електромагнітних коливань зондувальних сигналів в зовнішнє середовище та спрямоване уловлювання сигналів, відбитих від об'єктів, що становлять інтерес. Одночасно до антени можуть надходити завади: наприклад, електромагнітні коливання відбиті від земної поверхні, які можуть маскувати корисні сигнали від об'єктів. Сигнали, що прийняті антеною 1, через обертальні переходи по куту місця 2 та курсовому куту 3 надходять до другого плеча антенного перемикача 35. З виходу третього плеча антенного перемикача 35 сигнали надходять до вхідного приймального пристрою 36, підсилюються, фільтруються та переносяться на першу проміжну частоту першим приймальним перетворювачем частоти 37, фільтруються та підсилюються першим приймальним підсилювачем 38, переносяться на другу проміжну частоту другим приймальним перетворювачем частоти 39, фільтруються та підсилюються третім приймальним підсилювачем 40, а потім перетворюються в цифрову форму аналого-цифровим перетворювачем 41 з частотою, яка вища другої проміжної частоти та задається другим генератором тактів 47. На час між випромінюваннями зондувальних імпульсів бланкуються вихідний передавальний підсилювач 34 та передавальні перетворювачі частоти 30 та 32, а на час випромінювання зондувального імпульсу бланкується вхідний приймальний пристрій 36. Після аналого-цифрового перетворення цифрові відліки сигналів надходять в пристрій цифрової обробки сигналів 5 до оптимального фільтру 49, який забезпечує отримання максимального відношення рівня сигналів до шуму. Потім сигнали зазнають обробки схемою черезперіодної компенсації 50, яка забезпечує придушення нерухомих завад та зменшення динамічного діапазону сигналів при подальшій обробці. З першого виходу схеми черезперіодної компенсації 50 сигнали надходять до обчислювача перетворення Фур'є 51, який забезпечує ефективне когерентне міжперіодне накопичування прийнятих сигналів. З другого виходу схеми черезперіодної компенсації 50 сигнали надходять до відеопроцесора 21. 8 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 Після перетворення Фур'є формується ціла низка частотних каналів, кількість яких дорівнює розмірності перетворення Фур'є N, а порядкові номери яких починаються з нуля. Кожний частотний канал забезпечує найкраще накопичення енергії сигналів, відбитих від об'єктів, радіальна швидкість яких дорівнює (2) VR=m*FR*/(2N), де m - порядковий номер частотного каналу, FR - частота повторювання зондування, - довжина хвилі РЛС, N - розмірність перетворення Фур'є. Сигнали з виходів обчислювача перетворення Фур'є 51 зазнають додаткової обробки схемою вагової обробки 52, яка забезпечує істотне придушення бічних пелюсток накопичених сигналів в частотному просторі. Перший датчик коефіцієнтів 53 формує належну перехідну характеристику схеми черезперіодної компенсації 50, другий датчик коефіцієнтів 55 формує належну форму вікна зважування схемою вагової обробки 52, а датчик розмірності перетворення 54 оптимізує розмірність перетворення Фур'є в обчислювачі 51 та кількість відліків коефіцієнтів датчика 55 для схеми вагової обробки 52. Придушення пасивних завад в усій зоні відповідальності РЛС не завжди є обов'язковою, а в деяких випадках може бути шкідливою. Тому в обчислювачі просторових стробів 58 формуються межі робочих зон за даними датчиків меж зони за відстанню 56 та за азимутом 57. Поточні дані відстані від обчислювача 20 та поточні дані азимуту від обчислювача 22 порівнюються із сформованими межами робочих зон. У разі непопадання поточних координат в межі робочих зон на виході обчислювача просторових стробів 58 формується команда для схеми просторової селекції, яка змінює коефіцієнти датчика 53 таким чином, щоб забезпечити безперешкодний прохід сигналів через схему 50. В разі попадання поточних координат в межі робочих зон номінально встановлені коефіцієнти датчика 53 забезпечують придушення пасивних завад. З виходів схеми вагової обробки 52 пристрою цифрової обробки сигналів 5 сигнали надходять до виявника сигналів 6 таким чином. З перших виходів пристрою цифрової обробки сигналів 5 частотні канали з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки 84 надходять до відповідних за порядковими номерами сигнальних входів багатоканальної першої порогової схеми 85 (тут N розмірність перетворення Фур'є), де порівнюються з обчисленими пороговими рівнями. З других виходів пристрою цифрової обробки сигналів 5 частотні канали з порядковими номерами від 0 до (N-1) надходять до відповідних за порядковими номерами сигнальних входів комбінаторного пристрою 60 (тут N - розмірність перетворення Фур'є). З третього одноканального виходу пристрою цифрової обробки сигналів 5 сигнали нульового частотного каналу обчислювача Фур'є надходять до формувача карти завад 88, де в кожному елементі розрізнення карти накопичуються та запам'ятовуються рівні стаціонарних завад. В багатоканальному другому обчислювачі порогових рівнів 89 виміряні рівні завад помножуються на коефіцієнти четвертого багатоканального датчика коефіцієнтів 90, в якому для кожного частотного каналу існує відповідний коефіцієнт, який оптимізує пороговий рівень порогової схеми 85 в залежності від рівня бічних пелюсток частотних каналів у частотному просторі. Сформовані таким чином порогові рівні за рівнем завад використовуються як другі складові при обчисленні підсумкових порогових рівнів. В комбінаторному пристрою формуються декілька фракцій частотних каналів, в кожній з яких згруповано декілька частотних каналів за спеціальним алгоритмом, наприклад таким. До першої фракції включаються нульовий канал і декілька сусідніх частотних каналів, які розташовані симетрично навколо нульового каналу й мають порядкові номери від 1 до S та від (N-S) до (N-1), де N та S - відповідно розмірність перетворення Фур'є та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості. Кількість сусідніх бічних каналів визначається першим обчислювачем номерів частотних каналів 86 у відповідності з даними датчика параметрів (малорухомих) завад 87. Наприклад, при когерентній обробці 64 сигналів (N=64) і обчисленій кількості половини бічних каналів S=2 до першої фракції попадають канали з порядковими номерами 0; 1; 2; 62; 63. До другої фракції включаються частотні канали з порядковими номерами від (S+1) до (М-1), де М та S - відповідно номінальна кількість частотних каналів у стандартній фракції та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості. 9 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 Наприклад, при когерентній обробці 64 сигналів (N=64), номінальній кількості частотних каналів у стандартній фракції М=8 і обчисленій кількості половини бічних каналів S=2 до другої фракції попадають канали з порядковими номерами 3; 4; 5; 6; 7. До третьої фракції включаються частотні канали з порядковими номерами від (N-M) до (N-S1), де М та S - відповідно номінальна кількість частотних каналів у стандартній фракції та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості, а N - розмірність ШПФ. Наприклад, при когерентній обробці 64 сигналів (N=64), номінальній кількості частотних каналів у стандартній фракції М=8 і обчисленій кількості половини бічних каналів S=2 до третьої фракції попадають канали з порядковими номерами 56; 57; 58; 59; 60; 61. До m-ої фракції включаються частотні канали з порядковими номерами від [(m-3)*M] до [(m2)*М-1], причому m змінюється від 4 до (N/M+1); тут М та N - відповідно номінальна кількість частотних каналів у стандартній фракції та розмірність швидкого перетворення Фур'є. Наприклад, при когерентній обробці 64 сигналів (N=64) і номінальній кількості частотних каналів у стандартній фракції М=8 до четвертої фракції попадають канали з порядковими номерами 8; 9; 10; 11; 12; 13; 14; 15; а до дев'ятої фракції - канали з порядковими номерами 48; 49; 50; 51; 52; 53; 54; 55. Сигнали першої фракції частотних каналів з першого виходу комбінаторного пристрою 60 подаються на вхід першої схеми відбору максимуму 61, де в кожний поточний момент відбираються сигнали з найбільшим рівнем та передаються до обчислювача поточного рівня завад 66. Поточний рівень завад обчислюється за будь-яким відомим алгоритмом, наприклад, алгоритмом поточного середнього, який полягає у такому. Вихідні сигнали надходять до схеми затримки з відгалуженнями. Затримка від відгалуження до сусіднього відгалуження дорівнює елементу розрізнення за відстанню. Відгалуження розподілені таким чином. Перша сукупність відгалужень (яка складає, наприклад, 8 відгалужень), які розташовані послідовно один за одним та являють собою випереджуючі відліки сигналів, підключаються до входів першого суматора (першого напівсуматора), на виході якого формується перша напівсума рівнів відліків. Друга сукупність відгалужень (яка складає, наприклад, теж 8 відгалужень), які розташовані послідовно один за одним та являють собою запізнюючі відліки сигналів, підключаються до входів другого суматора (другого напівсуматора), на виході якого формується друга напівсума рівнів відліків. Між першою та другою сукупністю відліків сигналів розташовується декілька відгалужень, які формують "прогалину" навколо можливого розташування корисного сигналу. Обидві напівсуми додаються, отримана сума ділиться на кількість елементів розрізнення, які брали участь у її формуванні. Отриманий результат є рівень, який пропорційний поточному рівню завад в каналі. Цей рівень помножується в обчислювачі порогового рівня 71 (за рівнем власного шуму) на коефіцієнт, який задається третім багатоканальним датчиком коефіцієнтів 81, й надходить до другого входу третього обчислювача (підсумкового) порогового рівня 76 як першої складової порогового рівня. Вихідний результат другого обчислювача порогового рівня 89 (за рівнем завад) надходить до третього входу третього обчислювача (підсумкового) порогового рівня 76 як другої складової частини порогового рівня. До першого входу обчислювача 76 надходить перша складова поправки порогового рівня від обчислювача поправок 82 з урахуванням відповідної зміни порогового рівня зі зміною відстані та можливих корегувань порогового рівня оператором, які задаються за допомогою датчика поправок 83. Усі перелічені складові враховуються третім обчислювачем підсумкового порогового рівня 76, який формує підсумковий пороговий рівень для першої фракції частотних каналів. Сигнали першої фракції частотних каналів, які надходять до сигнальних входів (багатоканальної) порогової схеми 85 через (багатоканальну) схему затримки 84 порівнюються з відповідними пороговим рівнем, обчисленим обчислювачем 76. У разі перевищення порогового рівня в будь-якому частотному каналі першої фракції на виході третьої (багатоканальної) порогової схеми 85 з відповідним порядковим номером формується бінарна одиниця, яка надходить до входів суматора 92 та до відповідних за порядковими номерами входів схеми придушення імпульсних завад 94. Обробка сигналів в інших фракціях частотних каналів виконується аналогічно. Всі виявлені сигнали (бінарні одиниці) підсумовуються суматором 92, а обчислена сума порівнюється в другій пороговій схемі 93 з наперед визначеним пороговим рівнем, який задається датчиком порогового рівня 91. 10 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 При дії на РЛС імпульсної завади, наприклад від сусідньої РЛС, в багатьох частотних каналах з'являються перехідні процеси, які призводять до багатьох хибних одночасних виявлень сигналів в різних частотних каналах. Якщо таких виявлень сигналів багато, це свідчить саме про дію імпульсної завади. При перевищенні порогового рівня на виході другої порогової схеми 93 формується команда, яка на час дії такої завади придушує сигнали схемою придушення імпульсних завад 94. Якщо кількість сигналів, одночасно виявлених в частотних каналах, не досягає встановленого порогового рівня, це свідчить про велику ймовірність відсутності імпульсної завади, в такому разі виявлені сигнали проходять через схеми придушення імпульсних завад 94 безперешкодно. Для придушення рухомих пасивних завад, наприклад дощових крапель, використовується схема придушення частотних каналів 95. Другий датчик параметрів завад 97 задає параметри рухомої завади (наприклад, середню радіальну швидкість завади та її дисперсію). Другий обчислювач номерів частотних каналів 96 вираховує номери частотних каналів, які зазнали найбільшого ураження завадами, й передає їх до схеми придушення частотних каналів 95. Остання відключає відповідні за порядковими номерами виходи частотних каналів й забезпечує таким чином сталу ймовірність хибних виявлень в умовах дії рухомої завади. Виявлені сигнали з виходів виявника сигналів 6 надходять до входів пристрою відліку координат 7, до інших його входів надходять поточні координати осі променя антени від датчиків кута місця 16 та обчислювача поточного азимуту 22, а також поточна відстань від обчислювача 20. Пристрій відліку координат 6 забезпечує виявлення позначок об'єктів та відлік їх координат. Дані координат позначок передаються до пристрою обробки даних 8, який забезпечує супровід виявлених позначок, згладжування координат, визначення параметрів руху та екстраполяцію координат об'єктів, що супроводжуються. Вихідні дані з пристрою цифрової обробки сигналів 5 та виявника сигналів 6 передаються до відеопроцесора 21, де приводяться до стандарту, сумісного з параметрами пристрою відображення 12, а вихідні дані відеопроцесора 21 та дані з виходу пристрою обробки даних 8 через процесор обміну 9 надходять до центрального процесора 10, який здійснює оцінку радіолокаційної обстановки та відпрацювання даних для висвітлення первинної та вторинної обстановки на екрані пристрою відображення 12 та видачі даних комплексам та системам 26, що сполучаються з РЛС. Центральний процесор 10 формує команди для управління РЛС та її режимами роботи. Оператор взаємодіє з центральним процесором 10 за допомогою маніпулятора 11. Команди керування через процесор обміну 9 надходять до приймально-передавального пристрою 4, пристрою цифрової обробки сигналів 5; виявника сигналів 6, пристрою відліку координат 7, пристрою вторинної обробки 8, відео процесора 21 та до контролера 13. В РЛС передбачена можливість підключення датчика азимуту осі платформи 23 (кута відхилення осі платформи від напрямку на північ) та датчиків крену 24 і диференту 25 платформи. Аналогу (прототипу) винаходу притаманні деякі суттєві недоліки, які істотно обмежують ефективність його роботи. Основні тактові частоти РЛС формуються розгалуженою мережею автономних помножувачів (подільників) частоти опорного генератора, що призводить до неконтрольованої розбіжності їх параметрів в умовах застосування (обмеження когерентності коливань). Обмежена когерентність коливань основних тактових частот зумовлює обмеження спроможності РЛС виділяти рухомі цілі на тлі інтенсивних пасивних завад. Невраховане відхилення осі променя від осі антени призводить до підвищених похибок визначення координат цілей. Відхилення площини платформи від горизонтальної площини призводить до підвищених похибок визначення координат цілей. Задачею корисної моделі є усунення перелічених недоліків та істотне покращення характеристик радіолокаційної системи. Для вирішення цієї задачі пропонується використати нові додаткові істотні ознаки шляхом введення до складу РЛС певних пристроїв та забезпечення відповідних зв'язків між ними. В основу запропонованої корисної моделі покладено новий принцип формування коливань основних тактових частот, який суттєво підвищує когерентність коливань і, як наслідок, покращує придушення пасивних завад. Крім того, акуратне врахування поточного положення осі променя антени у просторі дозволяє суттєво підвищити точність вимірювання координат. 60 11 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 Суть корисної моделі полягає у такому. Відповідно до п. 1 формули корисної моделі покращення ефективності РЛС забезпечується шляхом вдосконалення системи формування коливань основних тактових частот. Блок-схема РЛС відповідно до п.1 формули Блок-схема аналога радіолокаційної системи наведена на фіг. 1, розгорнуті блок-схеми окремих фрагментів РЛС, наведені на фіг. 2, 3, а блок-схема фрагмента вдосконаленої радіолокаційної системи за п. 1 формули наведена на фіг. 4. До складу РЛС належать пристрої, аналогічні пристроям аналога корисної моделі: на фіг. 1 - антена 1, перший обертальний перехід 2 (за кутом місця), другий обертальний перехід 3 (за курсовим кутом), приймально-передавальний пристрій 4, пристрій цифрової обробки сигналів 5, виявник сигналів 6, пристрій відліку координат 7, пристрій обробки даних 8, пристрій обміну 9, центральний процесор 10, маніпулятор 11, пристрій відображення 12, контролер 13, перший пристрій керування 14 приводом (за кутом місця), перший привід антени 15, перший датчик кута 16 (датчик кута місця), другий пристрій керування 17 приводом (за курсовим кутом), другий привід антени 18, другий датчик кута 19 (датчик курсового кута), обчислювач поточної відстані 20, відеопроцесор 21, обчислювач поточного азимуту 22, на фіг. 2 - синхронізатор 27, формувач сигналів 28, перший 29, другий 31 та третій 33 (передавальні) підсилювачі, перший 30 та другий 32 (передавальні) перетворювачі частоти, вихідний (передавальний) підсилювач 34, антенний перемикач 35, вхідний (приймальний) пристрій 42, третій 37 та четвертий 39 (приймальні) перетворювачі частоти, четвертий 38 та п'ятий 40 (приймальні) підсилювачі, аналого-цифровий перетворювач 41, датчик частоти 42, перший 43 та другий 45 гетеродини, опорний генератор 44, на фіг. 3 - оптимальний фільтр 49, схема черезперіодної компенсації 50, обчислювач перетворення Фур'є 51, схема вагової обробки 52, перший 53, другий 55, третій 81 та четвертий 90 датчики коефіцієнтів, датчик розмірності перетворення (Фур'є) 54, датчики меж зон за відстанню 56 та за азимутом 57, обчислювач просторових стробів 58, схема просторової селекції 59, обчислювач поправок 82, датчик поправок 83, багатоканальна схема затримки 84, комбінаторний пристрій 60, схеми відбору максимуму 61…65, обчислювачі поточного рівня завад 66…70, перші обчислювачі порогових рівнів 71…75, другий обчислювач порогових рівнів 84, треті обчислювачі порогових рівнів 76…80, перший 86 та другий 96 обчислювачі номерів частотних каналів, перший 87 та другий 97 датчики параметрів завад, формувач карти завад 88, перша 85 та друга 93 порогові схеми, датчик порогового рівня 91, суматор 92, схема придушення імпульсних завад 94, схема придушення частотних каналів 95, а також пристрої, додатково введені до складу РЛС за п. 1 формули: на фіг. 4 - підсилювач-обмежувач 98, перша 99 та друга 100 схеми частотної селекції, помножувач частоти 101, подільник частоти 102. В РЛС передбачена можливість з'єднання з датчиком азимуту осі платформи 23, датчиком крену платформи 24, датчиком тангажа платформи 25 та комплексами і системами 26, що сполучаються з РЛС. Перелічені пристрої з'єднані між собою та з комплексами і системами, що сполучаються з РЛС, таким чином: радіолокаційна система підключена до датчика азимуту осі платформи 23, датчиків крену 24 та тангажа 25 платформи і з'єднана з комплексами і системами 26, з якими таке з'єднання передбачене, ланцюжок із послідовно з'єднаних формувача сигналів 28, першого 30 та другого 32 перетворювачів частоти, першого 29, другого 31 та третього 33 підсилювачів і вихідного підсилювача 34 підключений до першого плеча антенного перемикача 35, антена 1 через перший 2 та другий 3 обертальні переходи з'єднана з другим плечем антенного перемикача 35, до третього плеча антенного перемикача 35 підключений ланцюжок послідовно з'єднаних вхідного приймального пристрою 36, третього 37 та четвертого 39 перетворювачів частоти, четвертого 38 та п'ятого 40 підсилювача, аналого-цифрового перетворювача 41 та пристрою цифрової обробки сигналів 5, до гетеродинних входів другого 32 та третього перетворювачів 37 частоти підключені виходи першого гетеродина 43, а до його керуючій вхід з'єднаний з датчиком частоти 42, до гетеродинних входів першого 30 та четвертого 39 перетворювачів частоти підключені виходи другого гетеродина 45, до входів першого 43 та другого 45 гетеродинів підключені відповідно перший та другий вихід опорного генератора 44, до третього виходу опорного генератора 44 підключений вхід підсилювача-обмежувача 98, виходи останнього з'єднані з входами першої 99 та другої 100 схем частотної селекції, 12 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 вихід першої схеми частотної селекції 99 підключений до входу помножувача частоти 101, перший вихід якого підключений до тактового входу формувача сигналів 28, другий вихід помножувача 101 підключений до входу подільника частоти 102, вихід останнього з'єднано з тактовим входом синхронізатора 27, а вихід другої схеми частотної селекції 100 підключений до тактового входу аналого-цифрового перетворювача 41, виходи синхронізатора 27 підключені до сигнального входу обчислювача поточної відстані 20, до входів формувача сигналів 28, першого 30 та другого 32 перетворювачів частоти, вхідного приймального пристрою 36, вихідного підсилювача 34, пристрою цифрової обробки сигналів 5, виявника сигналів 6 та відео процесора 21, у пристрої цифрової обробки сигналів 5 послідовно з'єднані оптимальний фільтр 49, схема черезперіодної компенсації 50, схема перетворення Фур'є 51 та схема вагової обробки 52, датчик розмірності перетворення 54 з'єднаний із обчислювачем перетворення Фур'є 51 та другим датчиком коефіцієнтів 55, а перший 53 та другий 55 датчики коефіцієнтів з'єднані з відповідним входами схеми черезперіодної компенсації 50 та схеми вагової обробки 52, вихід обчислювача меж зон 58 підключений до керуючого входу схеми просторової селекції 59, а його входи підключені до датчиків меж за відстанню 56 та азимутом 57 і виходів обчислювачів поточної відстані 20 та поточного азимуту 22, вихід схеми просторової селекції 59 з'єднаний з першим датчиком коефіцієнтів 53, перші виходи частотних каналів пристрою цифрової обробки сигналів 5 з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки 84 з'єднані з відповідними за порядковими номерами сигнальними входами багатоканальної першої порогової схеми 85 (тут N - розмірність перетворення Фур'є), другі виходи частотних каналів пристрою цифрової обробки сигналів 5 з порядковими номерами від 0 до (N-1) з'єднані з відповідними за порядковими номерами сигнальними входами комбінаторного пристрою 60 (тут N - розмірність перетворення Фур'є), третій вихід нульового частотного каналу пристрою цифрової обробки сигналів 5 з'єднаний з формувачем карти завад 88, багатоканальні виходи комбінаторного пристрою 60, які є фракціями з декількох частотних каналів, підключені до входів схем відбору максимуму (61…65), а останніх підключені до відповідних входів обчислювачів поточного рівня шумових завад (66…70), перші входи перших обчислювачів порогових рівнів (71…75) підключені до відповідних за порядковими номерами виходів третього багатоканального датчика коефіцієнтів 81, а другі їх входи підключені до відповідних за порядковими номерами виходів обчислювачів поточного рівня шумових завад (66…70), перші входи другого обчислювача порогових рівнів 89 підключені до виходу формувача карти завад 88, а другі його входи підключені до відповідних за порядковими номерами виходів четвертого багатоканального датчика коефіцієнтів 90, перші входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювача поправок 82, другі входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювачів перших порогових рівнів (71…75), треті входи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами виходів обчислювача других порогових рівнів 89, виходи третіх обчислювачів порогових рівнів (76…80) підключені до відповідних за порядковими номерами порогових входів багатоканальної першої порогової схеми 85, а входи обчислювача поправок 82 з'єднані з датчиком поправок 83, перші виходи першої порогової схеми 85 через послідовно з'єднані схему придушення імпульсних завад 94 та схему придушення частотних каналів 95 підключені до входів пристрою відліку координат 7, другі виходи першої порогової схеми 85 підключені до входу суматора 92, вихід якого підключений до першого входу другої порогової схеми 93, а до другого входу останньої підключений датчик порогового рівня 91, вихід другої порогової схеми 93 підключений до керуючого входу схеми придушення імпульсних завад 94, вхід другого обчислювача номерів частотних каналів 96 з'єднаний з другим датчиком параметрів завад 97, а вихід другого обчислювача номерів частотних каналів 96 підключений до керуючого входу схеми придушення частотних каналів 95, вхід пристрою обробки даних 8 підключений до виходу пристрою відліку координат 7, а вихід процесора обробки даних 8 через пристрій обміну 9 підключений до центрального процесора 10, 13 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 вхід першого пристрою керування приводом 14 підключений до першого виходу контролера 13, вихід першого пристрою керування приводом 14 підключений до першого приводу антени 15, з останнім механічно зв'язаний перший датчик кута 16, вхід другого пристрою керування приводом 17 підключений до другого виходу контролера 13, вихід другого пристрою керування приводом 17 підключений до другого приводу антени 18, з останнім механічно зв'язаний другий датчик кута 19, вихід першого датчика кута 16 підключений до координатного входу пристрою відліку координат 7 та через пристрій обміну 9 до центрального процесора 10, вхід обчислювача поточної дальності 20 підключений до синхронізатора 27 приймальнопередавального пристрою 4, а виходи обчислювача поточної дальності 20 підключені до перших координатних входів відео процесора 21, виявника сигналів 6 та пристрою відліку координат 7, перший та другий входи обчислювача поточного азимуту 22 підключені відповідно до другого датчика кута 19 та через пристрій обміну 9 до датчика азимуту осі платформи 23, а виходи обчислювача поточного азимуту 22 підключені до других координатних входів відео процесора 21, виявника сигналів 6 та пристрою відліку координат 7, сигнальні входи відеопроцесора 21 підключені до другого виходу схеми черезперіодної компенсації 50 пристрою цифрової обробки сигналів 5 та до виходу виявника сигналів 6, через пристрій обміну 9 до центрального процесора 10 підключені маніпулятор 11, пристрій відображення 12, вихід відео процесора 21, керуючі входи приймально-передавального пристрою 4, пристрою цифрової обробки сигналів 5, виявника сигналів 6, пристрою відліку координат 7, процесора обробки даних 8 та контролера 13. Функціонування РЛС згідно з п. 1 формули корисної моделі. Відмінною особливістю функціонування радіолокаційної системи за п. 1 формули корисної моделі від її аналога є таке: - суттєво підвищена когерентність генераторів тактів, - суттєво зменшене тремтіння фронтів тактуючих та синхронізуючих імпульсів, - суттєво підвищена здатність виявлення рухомих цілей на тлі стаціонарних пасивних завад. Функціонування РЛС згідно з п. 1 формули корисної моделі в значній частині збігається з функціонуванням аналога винаходу, але існують і принципові розбіжності. Пошук по курсовому куту ведеться шляхом механічного обертання антени навколо вертикальної осі, пошук по куту місця здійснюється за рахунок механічної зміни кута місця осі променя антени. Команди на режими обертання антени по курсовому куту та поворот антени по куту місця надходять до контролера 13 від центрального процесора 10 через процесор обміну 9. Контролер 13 керує пристроями управління приводами антени 14 та 17, а останні управляють приводами антени по куту місця 15 та по курсовому куту 18. З приводами антени механічно зв'язані датчики кута місця 16 та курсового кута 19. Дані від першого датчика кута 16 надходять до пристрою відліку координат 7 та до центрального процесора 10 для прив'язки координат виявлених цілей за кутом місця. Дані від другого датчика кута 19 надходять до першого входу обчислювача поточного азимуту 22 осі променя антени. До другого входу обчислювача поточного азимуту 22 надходять дані від датчика азимуту осі платформи. Поточний азимут осі променя обчислюється за формулою: Az=KK+K, (1) де Az - азимут осі променя - кут між вертикальними площинами, які проходять через вісь променя та напрямок на північ, K - курс платформи - кут між вертикальними площинами, які проходять через вісь платформи та напрямок на північ, KK - курсовий кут променя в земних координатах - кут між вертикальними площинами, які проходять через вісь платформи та вісь променя. Опорний генератор створює високо стабільні синусоїдальні коливання, наприклад, з частотою 10 МГц. Ці коливання надходять до підсилювача-обмежувача 98, де посилюються та обмежуються за рівнем. На виході підсилювача-обмежувача 98 з'являється велика кількість когерентних гармонічних коливань, які зумовлені обмеженням синусоїдальних коливань опорного генератора 44. Ці коливання зазнають фільтрації першою 99 та дугою 100 схемами частотної селекції, на виході яких залишаються монохроматичні коливання, частота яких кратна частоті опорного генератора 44. 14 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 Перша схема частотної селекції 99 відфільтровує коливання, які використовуються як опорні для формувача зондувальних сигналів 28. Наприклад, при використанні мікросхеми AD9852 найбільша тактова частота формування сигналів складає 300 МГц, то ж необхідно частоту опорного генератора 44 помножити у 30 разів. (З мікросхемою AD9852 можна використати два помножувачі: один - зовнішній - у три рази, другий - внутрішній - у десять разів). Як перший помножувач частоти використовується підсилювач-обмежувач 98 разом із першою схемою частотної селекції 99. Таким чином, у розглянутому прикладі перша схема частотної селекції 99 повинна відфільтровувати третю гармоніку коливань опорного генератора 44. Для забезпечення високої когерентності коливань при формуванні зондувальних сигналів, тактів первинної обробки сигналів та усіх імпульсів запуску коливання другої тактової частоти формуються з коливань першої тактової частоти шляхом поділу частоти подільником частоти 102. Для забезпечення високої вірності перетворення прийнятих сигналів у цифрову форму доцільно використати аналого-цифрове перетворення на проміжній частоті. Найкраще, якщо тактова частота буде перевищувати другу проміжну частоту. Наприклад, якщо проміжна частота складає 30 МГц, то третя тактова частота може дорівнювати 40 МГц. Таким чином, у розглянутому прикладі друга схема частотної селекції 100 повинна відфільтровувати четверту гармоніку коливань опорного генератора 44. Зондувальні сигнали створюються формувачем зондувальних сигналів 28 на першій піднесучій частоті, яка дорівнює другій проміжній частоті при прийомі сигналів. Формування сигналів провадиться цифровим синтезатором, наприклад типу AD9852. В такому разі тип сигналу та його параметри задаються програмно. Як тактову частоту використовуються вихідні сигнали помножувача частоти 101. Створені сигнали фільтруються та підсилюються першим передавальним підсилювачем 29, потім першим передавальним перетворювачем частоти 30 переносяться на другу піднесучу частоту, яка дорівнює першій проміжній частоті при прийомі сигналів, фільтруються та підсилюються другим передавальним підсилювачем 31, переносяться на несучу частоту РЛС другим передавальним перетворювачем частоти 32, фільтруються та підсилюються третім 33 та вихідним 34 передавальними підсилювачами, надходять до першого плеча антенного перемикача 35 і далі через обертальні переходи по курсовому куту 3 та куту місця 2 надходять до антени 1. Антена 1 забезпечує спрямоване випромінювання електромагнітних коливань зондувальних сигналів в зовнішнє середовище та спрямоване уловлювання сигналів, відбитих від об'єктів, що становлять інтерес. Одночасно до антени можуть надходити завади: електромагнітні коливання, які можуть маскувати корисні сигнали від об'єктів. Сигнали, що прийняті антеною 1, через обертальні переходи по куту місця 2 та курсовому куту 3 надходять до другого плеча антенного перемикача 35. З виходу третього плеча антенного перемикача 35 сигнали надходять до вхідного приймального пристрою 36, підсилюються, фільтруються та переносяться на першу проміжну частоту першим приймальним перетворювачем частоти 37, фільтруються та підсилюються першим приймальним підсилювачем 38, переносяться на другу проміжну частоту другим приймальним перетворювачем частоти 39, фільтруються та підсилюються третім приймальним підсилювачем 40, а потім перетворюються в цифрову форму аналого-цифровим перетворювачем 41 з частотою, яка вища другої проміжної частоти та задається другою схемою частотної селекції 100. Після аналого-цифрового перетворення цифрові відліки сигналів надходять в пристрій цифрової обробки сигналів 5 до оптимального фільтру 49, який забезпечує отримання максимального відношення рівня сигналів до шуму. Потім сигнали зазнають обробки схемою черезперіодної компенсації 50, яка забезпечує придушення нерухомих завад та зменшення динамічного діапазону сигналів при подальшій обробці. З першого виходу схеми черезперіодної компенсації 50 сигнали надходять до обчислювача перетворення Фур'є 51, який забезпечують ефективне когерентне міжперіодне накопичування прийнятих сигналів. З другого виходу схеми черезперіодної компенсації 50 сигнали надходять до відеопроцесора 21. Після перетворення Фур'є формується ціла низка частотних каналів, кількість яких дорівнює розмірності перетворення Фур'є N, а порядкові номери яких починаються з нуля. Кожний частотний канал забезпечує найкраще накопичення енергії сигналів, відбитих від об'єктів, радіальна швидкість яких дорівнює (2) VR=m*FR*/(2N), 15 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 де m - порядковий номер частотного каналу, FR - частота повторювання зондування, - довжина хвилі РЛС, N - розмірність перетворення Фур'є. Сигнали з виходів обчислювача перетворення Фур'є 51 зазнають додаткової обробки схемою вагової обробки 52, яка забезпечує істотне придушення бічних пелюсток накопичених сигналів в частотному просторі. Перший датчик коефіцієнтів 53 формує належну перехідну характеристику схеми черезперіодної компенсації 50, другий датчик коефіцієнтів 55 формує належну форму вікна зважування схемою вагової обробки 52, а датчик розмірності перетворення 54 оптимізує розмірність перетворення Фур'є в обчислювачі 51 та кількість відліків коефіцієнтів датчика 55 для схеми вагової обробки 52. Придушення пасивних завад в усій зоні відповідальності РЛС не завжди є обов'язковою, а в деяких випадках може бути шкідливою. Тому в обчислювачі просторових стробів 58 формуються межі робочих зон за даними датчиків меж зони за відстанню 56 та за азимутом 57. Поточні дані відстані від обчислювача 20 та поточні дані азимуту від обчислювача 22 порівнюються із сформованими межами робочих зон. В разі непопадання поточних координат в межі робочих зон на виході обчислювача просторових стробів 59 формується команда, яка змінює коефіцієнти датчика 53 таким чином, щоб забезпечити безперешкодний прохід сигналів через схему 50. У разі попадання поточних координат в межі робочих зон номінально встановлені коефіцієнти датчика 53 забезпечують придушення пасивних завад. З виходів схеми вагової обробки 51 пристрою цифрової обробки сигналів 5 сигнали надходять до виявника сигналів 6 таким чином. З перших виходів пристрою цифрової обробки сигналів 5 частотні канали з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки 84 надходять до відповідних за порядковими номерами сигнальних входів багатоканальної першої порогової схеми 85 (тут N розмірність перетворення Фур'є), де порівнюються з обчисленими пороговими рівнями. З других виходів пристрою цифрової обробки сигналів 5 частотні канали з порядковими номерами від 0 до (N-1) надходять до відповідних за порядковими номерами сигнальних входів комбінаторного пристрою 85 (тут N - розмірність перетворення Фур'є). З третього виходу пристрою цифрової обробки сигналів 5 сигнали нульового частотного каналу обчислювача Фур'є надходять до формувача карти завад 88, де в кожному елементі розрізнення карти накопичуються та запам'ятовуються рівні завад. Рівні завад помножуються в багатоканальному другому обчислювачі порогових рівнів (за рівнем завад) 89 на коефіцієнти четвертого багатоканального датчика коефіцієнтів 90, в якому для кожного частотного каналу існує відповідний коефіцієнт. Сформовані таким чином порогові рівні за рівнем завад використовуються в якості других складових при обчисленні підсумкових порогових рівнів. В комбінаторному пристрою формуються декілька фракцій частотних каналів, в кожній з яких згруповано декілька частотних каналів за спеціальним алгоритмом, наприклад, таким. До першої фракції включаються нульовий канал і декілька сусідніх частотних каналів, які розташовані симетрично навколо нульового каналу й мають порядкові номери від 1 до S та від (N-S) до (N-1), де N та S - відповідно розмірність перетворення Фур'є та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості. Кількість сусідніх бічних каналів визначається першим обчислювачем номерів частотних каналів 86 у відповідності з даними датчика параметрів (малорухомих) завад 87. Наприклад, при когерентній обробці 64 сигналів (N=64) і обчисленій кількості половини бічних каналів S=2 до першої фракції попадають канали з порядковими номерами 0; 1; 2; 62; 63. До другої фракції включаються частотні канали з порядковими номерами від (S+1) до (М-1), де М та S - відповідно номінальна кількість частотних каналів у стандартній фракції та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості. Наприклад, при когерентній обробці 64 сигналів (N=64), номінальній кількості частотних каналів у стандартній фракції М=8 і обчисленій кількості половини бічних каналів S=2 до другої фракції попадають канали з порядковими номерами 3; 4; 5; 6; 7. До третьої фракції включаються частотні канали з порядковими номерами від (N-M) до (N-S1), де М та S - відповідно номінальна кількість частотних каналів у стандартній фракції та половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості, a N - розмірність ШПФ. 16 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 60 Наприклад, при когерентній обробці 64 сигналів (N=64), номінальній кількості частотних каналів у стандартній фракції М=8 і обчисленій кількості половини бічних каналів S=2 до третьої фракції попадають канали з порядковими номерами 56; 57; 58; 59; 60; 61. До m-ої фракції включаються частотні канали з порядковими номерами від [(m-3)*М] до [(m2)*М-1], причому m змінюється від 4 до (N/M+1); тут М та N - відповідно номінальна кількість частотних каналів у стандартній фракції та розмірність швидкого перетворення Фур'є. Наприклад, при когерентній обробці 64 сигналів (N=64) і номінальній кількості частотних каналів у стандартній фракції М=8 до четвертої фракції попадають канали з порядковими номерами 8; 9; 10; 11; 12; 13; 14; 15; а до дев'ятої фракції - канали з порядковими номерами 48; 49; 50; 51; 52; 53; 54; 55. Сигнали першої фракції частотних каналів з першого виходу комбінаторного пристрою 60 подаються на вхід першої схеми відбору максимуму 61, де в кожний поточний момент відбираються сигнали з найбільшим рівнем та передаються до обчислювача поточного рівня завад 66. Поточний рівень завад обчислюється за будь-яким відомим алгоритмом, наприклад, алгоритмом поточного середнього, який полягає у такому. Вихідні сигнали надходять до схеми затримки з відгалуженнями. Затримка від відгалуження до сусіднього відгалуження дорівнює елементу розрізнення за відстанню. Відгалуження розподілені таким чином. Перша сукупність відгалужень (яка складає, наприклад, 8 відгалужень), які розташовані послідовно один за одним та являють собою випереджуючі відліки сигналів, підключаються до входів першого суматора (першого напівсуматора), на виході якого формується перша напівсума відліків. Друга сукупність відгалужень (яка складає, наприклад, теж 8 відгалужень), які розташовані послідовно один за одним та являють собою запізнюючі відліки сигналів, підключаються до входів другого суматора (другого напівсуматора), на виході якого формується друга напівсума відліків. Між першою та другою сукупністю відліків сигналів розташовується декілька відгалужень, які формують "прогалину" навколо можливого розташування корисного сигналу. Обидві напівсуми додаються, отримана сума ділиться на кількість елементів розрізнення, які брали участь у її формуванні. Отриманий результат є рівень, який пропорційний поточному рівню завад в каналі. Цей рівень помножується в обчислювачі порогового рівня 71 (за рівнем власного шуму) на коефіцієнт, який задається третім багатоканальним датчиком коефіцієнтів 81, й надходить до другого входу третього обчислювача (підсумкового) порогового рівня 76 як перша складова порогового рівня. Вихідний результат другого обчислювача порогового рівня 89 (за рівнем завад) надходить до третього входу третього обчислювача (підсумкового) порогового рівня 76 як друга складової частини порогового рівня. До першого входу обчислювача 76 надходить третя складова поправки порогового рівня від обчислювача поправок 82 з урахуванням відповідної зміни порогового рівня зі зміною відстані та можливих корегувань порогового рівня оператором, які задаються за допомогою датчика поправок 83. Усі перелічені складові підсумовуються третім обчислювачем підсумкового порогового рівня 76 і надходять як підсумковий пороговий рівень до опорних входів першої (багатоканальної) порогової схеми 85 для першої фракції частотних каналів. Сигнали першої фракції частотних каналів, які надходять до сигнальних входів (багатоканальної) порогової схеми 85 через (багатоканальну) схему затримки 84 порівнюються з відповідними пороговим рівнем, обчисленим обчислювачем 76. У разі перевищення порогового рівня в будь-якому частотному каналі першої фракції на виході третьої (багатоканальної) порогової схеми 85 з відповідним порядковим номером формується бінарна одиниця, яка надходить до входів суматора 92 та до відповідних за порядковими номерами входів схеми придушення імпульсних завад 94. Обробка сигналів в інших фракціях частотних каналів виконується аналогічно. Всі виявлені сигнали (бінарні одиниці) підсумовуються суматором 92, а обчислена сума порівнюється в другій пороговій схемі 93 з наперед визначеним пороговим рівнем, який задається датчиком порогового рівня 91. При дії на РЛС імпульсної завади, наприклад від сусідньої РЛС, в багатьох частотних каналах з'являються перехідні процеси, які призводять до багатьох хибних одночасних виявлень сигналів в різних частотних каналах. Якщо таких виявлень сигналів багато, це свідчить саме про дію імпульсної завади. При перевищені порогового рівня на виході другої порогової схеми 93 формується логічна одиниця, яка на час дії такої завади використовується як команда придушення сигналів, які надійшли до входів схеми придушення імпульсних завад 94. 17 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 Якщо кількість сигналів, одночасно виявлених в частотних каналах, не досягає встановленого порогового рівня, це свідчить про велику ймовірність відсутності імпульсної завади, в такому разі виявлені сигнали проходять через схеми придушення імпульсних завад 94 безперешкодно. Для придушення рухомих пасивних завад, наприклад дощових крапель, використовується схема придушення частотних каналів 95. Другий датчик параметрів завад 97 задає параметри рухомої завади (наприклад, середню радіальну швидкість завади та її дисперсію). Другий обчислювач номерів частотних каналів 96 вираховує номери частотних каналів, які зазнали найбільшого ураження завадами, й передає їх до схеми придушення частотних каналів 95. Остання відключає відповідні за порядковими номерами виходи частотних каналів й забезпечує таким чином сталу ймовірність хибних виявлень в умовах дії рухомої завади. Виявлені сигнали з виходів виявника сигналів 6 надходять до входів пристрою відліку координат 7, до інших його входів надходять поточні координати осі променя антени від датчиків кута місця 16 та обчислювача поточного азимуту 22, а також поточна відстань від обчислювача 20. Пристрій відліку координат 6 забезпечує виявлення позначок об'єктів та відлік їх координат. Дані координат позначок передаються до пристрою обробки даних 8, який забезпечує супровід виявлених позначок, згладжування координат, визначення параметрів руху та екстраполяцію координат об'єктів, що супроводжуються. Вихідні дані з пристрою цифрової обробки сигналів 5 та виявника сигналів 6 передаються до відеопроцесора 21, де приводяться до стандарту, сумісного з параметрами пристрою відображення 12, а вихідні дані відеопроцесора 21 та дані з виходу пристрою обробки даних 8 через процесор обміну 9 надходять до центрального процесора 10. Центральний процесор 10 здійснює оцінку радіолокаційної обстановки та відпрацювання даних для висвітлення первинної та вторинної обстановки на екрані пристрою відображення 12 та видачі даних комплексам та системам, що сполучаються з РЛС. Центральний процесор 10 формує команди для керуванняння РЛС та її режимами роботи. Оператор взаємодіє з центральним процесором 10 за допомогою маніпулятора 11. Команди керування через процесор обміну 9 надходять до приймально-передавального пристрою 4, пристрою цифрової обробки сигналів 5; виявника сигналів 6, пристрою відліку координат 7, пристрою вторинної обробки 8, відео процесора 21 та до контролера 13. В РЛС передбачена можливість підключення датчика азимуту осі платформи 23 (кута відхилення осі платформи від напрямку на північ) та датчиків крену 24 і диференту 25 платформи. Запропоноване вдосконалення радіолокаційної станції суттєво спрощує її технічну реалізацію та покращує її показники щодо виявлення у складній радіолокаційній обстановці сигналів, відбитих від об'єктів, що становлять інтерес. Блок-схема РЛС відповідно до п. 2 формули корисної моделі. Блок-схема запропонованої радіолокаційної системи наведена на фіг. 5. До складу радіолокаційної системи за п. 1 формули корисної моделі додатково введено датчик відхилення променя 103, який підключено до обчислювача поточного азимуту 22. Функціонування РЛС згідно з п. 2 формули корисної моделі. Функціонування РЛС згідно з п. 2 формули корисної моделі збігається з функціонуванням пристрою згідно з п. 1 формули за винятком такого. Дані від другого датчика кута 19 надходять до першого входу обчислювача поточного азимуту 22 осі променя антени. До другого входу обчислювача поточного азимуту 22 надходять дані від датчика азимуту осі платформи 23. До третього входу обчислювача поточного азимуту 22 надходять дані від датчика відхилення променя 103. Поточний азимут обчислюється за формулою: (3) Az=KK+K+, де Az - азимут осі променя - кут між вертикальними площинами, які проходять через вісь променя та напрямок на північ, K - курс платформи - кут між вертикальними площинами, які проходять через вісь платформи та напрямок на північ, KK - курсовий кут осі антени в земних координатах - кут між вертикальними площинами, які проходять через вісь платформи та вісь антени. - кут відхилення осі променя від осі антени - кут між вертикальними площинами, які проходять через вісь променя та вісь антени. 18 UA 78187 U 5 10 15 20 Відхилення осі променя від осі антени може бути обумовлено конструктивними особливостями антени, виробничими допусками або принципом дії антени, наприклад при використанні хвилевідно-щілинної антени, яка збуджується з одного кінця. Запропоноване вдосконалення радіолокаційної станції суттєво покращує її показники щодо точності визначення координат радіолокаційних об'єктів. Блок-схема РЛС відповідно до п. 3 формули корисної моделі. Блок-схема запропонованої радіолокаційної системи наведена на фіг. 6. До складу радіолокаційної системи за п. 3 формули корисної моделі введено обчислювач відхилення променя 104 від осі антени в координатах платформи, вхід якого підключений до датчика частоти 42 приймально-передавального пристрою 4, а вихід підключений до входу обчислювача поточного азимуту 22. Функціонування РЛС згідно з п. 3 формули корисної моделі. Якщо вісь антени РЛС змінює своє положення у просторі в залежності від поточної робочої частоти, наприклад, в антенах з хвилевідно-щілинними випромінювачами, то при роботі РЛС в широкому діапазоні частот з'являється значна похибка при визначенні координат радіолокаційних об'єктів. Зменшення похибки можна досягнути шляхом врахування поточної величини кута відхилення осі променя. Введений обчислювач відхилення променя 104 розраховує поточний кут відхилення осі променя від осі антени в координатах платформи за даними про частоту (або довжину хвилі) РЛС, які отримуються від датчика 42. Наприклад, кут відхилення осі променя антени від осі антени 5 при протифазному збудженні щілин-випромінювачів можна визначити за формулами: 1/ 2 arcsin 1 / 2a2 / 2b , або 25 30 35 40 (4) 1/ 2 (5) arcsin 1 c / 4a 2 f c / 2bf , де - довжина хвилі РЛС, f - частота РЛС, с - швидкість розповсюдження електромагнітних хвиль, а - розмір широкої стінки хвилевідно-щілинного випромінювача, b - відстань між центрами випромінюючих щілин. Потім поточний азимут осі променя розраховується за формулою (3). Запропоноване вдосконалення радіолокаційної станції суттєво покращує її показники щодо точності визначення координат радіолокаційних об'єктів при зміні несучої частоти РЛС. Блок-схема РЛС відповідно до п. 4 формули корисної моделі. Блок-схема запропонованої радіолокаційної системи наведена на фіг. 7. До складу радіолокаційної системи за п. 4 формули корисної моделі додатково введено обчислювач поточних координат променя 105, входи якого підключені до виходу обчислювача відхилення променя 104 та через пристрій обміну до датчиків крену 24 та тангажа 25 платформи, а вихід підключений до входу обчислювача поточного азимуту 22. Функціонування РЛС згідно з п. 4 формули корисної моделі. Якщо платформа, на якій встановлена РЛС, змінює своє положення у просторі то при роботі РЛС з'являється значна похибка при визначенні координат радіолокаційних об'єктів. Зменшення похибки можна досягти шляхом розрахунку та врахуванню зміни поточного положення осі променя антени у просторі. Введений обчислювач 105 розраховує поточні координати променя в стабілізованій системі координат з урахуванням кутів крену та тангажа платформи. Розрахунки здійснюються за формулами: (6) K arctg( Y / X) arcctg( X / Y) , 45 Y (cos cos sin sin cos ) cos cos sin sin , X (cos cos cos sin sin ) cos [(cos cos sin sin cos ) sin cos sin cos ] sin (7) , E arcsin{(cos cos cos sin sin ) sin [cos cos cos cos cos sin sin cos ) sin ] cos } 19 (8) . (9) UA 78187 U 5 10 15 20 Тут прийняті такі позначення: - кут відхилення осі променя від осі антени - (кут між вертикальними площинами, які проходять через вісь променя та вісь антени), - довжина хвилі РЛС, Е - кут відхилення осі променя від горизонтальної площини (кут місця в земних координатах), K - кут між вертикальними площинами, які проходять через вісь платформи та напрямок на північ (курс платформи), KK - кут між вертикальними площинами, які проходять через вісь платформи та вісь променя (курсовий кут променя в земних координатах), - кут відхилення осі променя від діаметральної площини платформи (курсовий кут променя в координатах платформи), - кут відхилення осі променя від площини платформи (кут місця в координатах платформи), - крен платформи за даними датчика 24, - диферент платформи за даними датчика 25. Поточний азимут осі променя розраховується за формулою (3). Запропоноване вдосконалення радіолокаційної станції суттєво покращує її показники щодо точності визначення координат радіолокаційних об'єктів при зміні у просторі положення платформи, на якій встановлена РЛС. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 1. Радіолокаційна система, що містить антену, перший та другий обертальні переходи, перший та другий приводи антени, перший та другий пристрої керування приводами, контролер, перший та другий датчики кута, пристрій відліку координат, процесор обробки даних, пристрій обміну, центральний процесор, маніпулятор, пристрій відображення, обчислювач поточної відстані, обчислювач поточного азимуту, відеопроцесор, приймально-передавальний пристрій, що має у своєму складі опорний генератор, перший і другий гетеродини, датчик частоти, антенний перемикач, формувач сигналів, перший, другий третій і четвертий перетворювачі частоти, вихідний підсилювач, вхідний приймальний пристрій, аналого-цифровий перетворювач та синхронізатор, пристрій цифрової обробки сигналів, що має у своєму складі оптимальний фільтр, схему черезперіодної компенсації, схему перетворення Фур'є, схему вагової обробки, перший і другий датчики коефіцієнтів та датчик розмірності перетворення, датчики меж зон за дальністю та азимутом, обчислювач просторових стробів, схему просторової селекції, виявник сигналів, що має у своєму складі перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, комбінаторний пристрій, схеми відбору максимумів, обчислювачі поточних рівнів шумових завад, перші, другий та треті обчислювачі порогових рівнів, третій та четвертий датчик коефіцієнтів, датчик поправок, обчислювач поправок, схему затримки, формувач карти завад, першу та другу порогові схеми, суматор, датчик порогового рівня, схему придушення імпульсних завад, схему придушення частотних каналів, причому радіолокаційна система підключена до датчика азимуту осі платформи, датчиків крену та тангажа платформи і з'єднана з комплексами і системами, з якими таке з'єднання передбачене, ланцюжок із послідовно з'єднаних формувача сигналів, першого та другого перетворювачів частоти і вихідного підсилювача підключений до першого плеча антенного перемикача, антена через перший та другий обертальні переходи з'єднана з другим плечем антенного перемикача, до третього плеча антенного перемикача підключений ланцюжок послідовно з'єднаних вхідного приймального пристрою, третього та четвертого перетворювача частоти, аналого-цифрового перетворювача та пристрою цифрової обробки сигналів, до гетеродинних входів другого та третього перетворювачів частоти підключені виходи першого гетеродина, а його керуючий вхід з'єднаний з датчиком частоти, до гетеродинних входів першого та четвертого перетворювачів частоти підключені виходи другого гетеродина, до входів першого та другого гетеродинів підключені відповідно перший та другий вихід опорного генератора, виходи синхронізатора підключені до сигнального входу обчислювача поточної відстані, до входів формувача сигналів, першого та другого перетворювачів частоти, вхідного приймального пристрою та вихідного підсилювача, пристрою цифрової обробки сигналів, виявника та відеопроцесора, 20 UA 78187 U 5 10 15 20 25 30 35 40 45 50 55 у пристрої цифрової обробки сигналів послідовно з'єднані оптимальний фільтр, схема черезперіодної компенсації, схема перетворення Фур'є та схема вагової обробки, датчик розмірності перетворення з'єднаний із схемою перетворення Фур'є та другим датчиком коефіцієнтів, а перший та другий датчики коефіцієнтів з'єднані з відповідним входами схеми черезперіодної компенсації та схеми вагової обробки, вихід обчислювача меж зон підключений до керуючого входу схеми просторової селекції, його входи підключені до датчиків меж за відстанню та азимутом і виходів обчислювачів поточної відстані та поточного азимуту, а вихід схеми просторової селекції підключений до першого датчика коефіцієнтів, перші виходи частотних каналів пристрою цифрової обробки сигналів з порядковими номерами від 0 до (N-1) через багатоканальну схему затримки з'єднані з відповідними за порядковими номерами сигнальними входами багатоканальної першої порогової схеми (тут N - розмірність перетворення Фур'є), другі виходи частотних каналів пристрою цифрової обробки сигналів з порядковими номерами від 0 до (N-1) з'єднані з відповідними за порядковими номерами сигнальними входами комбінаторного пристрою (тут N - розмірність перетворення Фур'є), третій вихід нульового частотного каналу пристрою цифрової обробки сигналів з'єднаний з формувачем карти завад, виходи комбінаторного пристрою підключені до відповідних входів схем відбору максимуму, а виходи останніх з'єднанні із входами обчислювачів поточного рівня завад, перші входи перших обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів другого багатоканального датчика коефіцієнтів, а другі його входи підключені до відповідних за порядковими номерами виходів обчислювачів поточного рівня шумових завад, перші входи другого обчислювача порогових рівнів підключені до виходу формувача карти завад, а другі його входи підключені до відповідних за порядковими номерами виходів четвертого багатоканального датчика коефіцієнтів, перші входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювача поправок, другі входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювачів перших порогових рівнів, треті входи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами виходів обчислювачів других порогових рівнів, виходи третіх обчислювачів порогових рівнів підключені до відповідних за порядковими номерами порогових входів багатоканальної першої порогової схеми, а входи обчислювача поправок з'єднані з датчиком поправок, перші виходи першої порогової схеми через послідовно з'єднані схему придушення імпульсних завад та схему придушення частотних каналів підключені до входів пристрою відліку координат, другі виходи першої порогової схеми підключені до входу суматора, вихід якого підключений до першого входу другої порогової схеми, а до другого входу останньої підключений датчик порогового рівня, вихід другої порогової схеми підключений до керуючого входу схеми придушення імпульсних завад, входи другого обчислювача номерів частотних каналів з'єднані з другим датчиком параметрів завад, а його вихід підключений до керуючого входу схеми придушення частотних каналів, вхід процесора обробки даних підключений до виходу пристрою відліку координат, а вихід процесора через пристрій обміну підключений до центрального процесора, вихід першого датчика кута підключений до координатного входу пристрою відліку координат та через пристрій обміну до центрального процесора, вхід обчислювача поточної дальності підключений до синхронізатора, а його виходи підключені до перших координатних входів відеопроцесора, виявника сигналів та пристрою відліку координат, перший та другий входи обчислювача поточного азимуту підключені відповідно до другого датчика кута та датчика азимуту осі платформи, а його виходи підключені до других координатних входів відеопроцесора, виявника сигналів та пристрою відліку координат, сигнальні входи відеопроцесора підключені до другого виходу схеми черезперіодної компенсації пристрою цифрової обробки сигналів та до виходу виявника сигналів, через пристрій обміну до центрального процесора підключені маніпулятор та пристрій відображення, вихід відеопроцесора, керуючі входи приймально-передавального пристрою, пристрою цифрової обробки сигналів, виявника сигналів, пристрою відліку координат, процесора обробки даних та контролера, 21 UA 78187 U 5 10 15 20 25 вхід першого пристрою керування приводом підключений до першого виходу контролера, вихід першого пристрою керування приводом підключений до першого приводу антени, з останнім механічно зв'язаний перший датчик кута, вхід другого пристрою керування приводом підключений до другого виходу контролера, вихід другого пристрою керування приводом підключений до другого приводу антени, з останнім механічно зв'язаний другий датчик кута, яка відрізняється тим, що до складу радіолокаційної системи введені підсилювач-обмежувач, перша та друга схема частотної селекції, помножувач частоти та подільник частоти, причому до виходу опорного генератора підключений вхід підсилювача-обмежувача, виходи останнього з'єднані з входами першої та другої схем частотної селекції, вихід першої схеми частотної селекції підключений до входу помножувача частоти, перший вихід якого підключений до тактового входу формувача сигналів, другий вихід помножувача підключений до входу подільника частоти, вихід останнього з'єднано з тактовим входом синхронізатора, а вихід другої схеми частотної селекції підключений до тактового входу аналого-цифрового перетворювача. 2. Радіолокаційна система за п. 1, яка відрізняється тим, що до її складу введено датчик відхилення осі променя, який підключений до третього входу обчислювача поточного азимуту. 3. Радіолокаційна система за п. 1, яка відрізняється тим, що до її складу введено обчислювач відхилення осі променя, причому вхід обчислювача підключений до датчика частоти, а його вихід з'єднаний із входом обчислювача поточного азимуту. 4. Радіолокаційна система за п. 3, яка відрізняється тим, що до її складу введено обчислювач поточних координат променя антени, причому перший та другий входи обчислювача поточних координат променя антени підключені відповідно до першого та другого датчиків кута, третій його вхід підключений до виходу обчислювача відхилення осі променя антени, четвертий та п'ятий його входи через пристрій обміну підключені до датчиків крену і тангажа платформи, перший його вихід з'єднаний із входом обчислювача поточного азимуту, другий його вихід з'єднаний із входом пристрою відліку координат, а третій його вихід через пристрій обміну підключений до центрального процесора. 22 UA 78187 U 23 UA 78187 U 24 UA 78187 U 25 UA 78187 U 26 UA 78187 U 27 UA 78187 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 28
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar system
Автори англійськоюHuz Volodymyr Ivanovych, Lipatov Valerii Pavlovych, Butyrin Anatolii Viktorovych, Bilokoz Serhii Serhiiovych, Zaitsev Anatolii Yakymovych, Torgonskyi Volodymyr Vasyliovych, Malyshev Oleksandr Oleksandrovych, Svirydenko Oleksandr Danylovych, Filkevych Oleksandr Sergiiovych, Khomenko Mykola Vasyliovych, Pironer Yan Mykhailovych, Barinholts Tetiana Volodymyrivna
Назва патенту російськоюРадиолокационная система
Автори російськоюГузь Владимир Иванович, Липатов Валерий Павлович, Бутырин Анатолий Викторович, Билокоз Сергей Сергеевич, Зайцев Анатолий Акимович, Торгонский Владимир Васильевич, Малышев Александр Александрович, Свириденко Александр Данилович, Филькевич Александр Сергеевич, Хоменко Николай Васильевич, Пиронер Ян Михайлович, Барингольц Татьяна Владимировна
МПК / Мітки
МПК: G01S 13/02
Мітки: радіолокаційна, система
Код посилання
<a href="https://ua.patents.su/30-78187-radiolokacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційна система</a>
Радіолокаційна система
Номер патенту: 82012
Опубліковано: 25.02.2008
Автори: Ліпатов Валерій Павлович, Фількевич Олександр Сергійович, Хоменко Микола Васильович, Гузь Володимир Іванович, Білокоз Сергій Сергійович, Бутирін Анатолій Вікторович, Піронер Ян Михайлович, Зайцев Анатолій Якимович, Торгонський Володимир Васильович
МПК: G01S 13/02
Мітки: радіолокаційна, система
Формула / Реферат:
1. Радіолокаційна система, до складу якої входять антена, обертальні переходи по куту місця та курсовому куту, пристрій відліку координат, пристрій вторинної обробки, відеопроцесор, процесор керування, контролер, перший та другий пристрої керування приводами, привід повороту антени, привід обертання антени, датчик кута місця, датчик курсового кута, перший процесор обміну;приймально-передавальний пристрій, що має у своєму складі...
Пасивно-активна радіолокаційна система
Номер патенту: 78931
Опубліковано: 25.04.2007
Автори: Єна Григорій Олександрович, Білановський Михайло Миколайович, Білокоз Сергій Сергійович, Хоменко Микола Васильович, Ліпатов Валерій Павлович, Гузь Володимир Іванович, Бутирін Анатолій Вікторович, Андрусенко Микола Іванович, Толстіхін Микола Вікторович, Шовгун Віталій Андрійович, Біличенко Іван Іванович
МПК: G01S 13/86
Мітки: радіолокаційна, пасивно-активна, система
Формула / Реферат:
1. Пасивно-активна радіолокаційна система, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при...
Пасивно-активна радіолокаційна система
Номер патенту: 12292
Опубліковано: 16.01.2006
Автори: Ліпатов Валерій Павлович, Білановський Михайло Миколайович, Бутирін Анатолій Вікторович, Біличенко Іван Іванович, Гузь Володимир Іванович, Андрусенко Микола Іванович, Хоменко Микола Васильович, Толстіхін Микола Вікторович, Єна Григорій Олександрович, Білокоз Сергій Сергійович, Шовгун Віталій Андрійович
МПК: G01S 13/86
Мітки: радіолокаційна, система, пасивно-активна
Формула / Реферат:
1. Пасивно-активна радіолокаційна система, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при...
Радіолокаційна система
Номер патенту: 19788
Опубліковано: 15.12.2006
Автори: Гузь Володимир Іванович, Торгонський Володимир Васильович, Піронер Ян Михайлович, Бутирін Анатолій Вікторович, Хоменко Микола Васильович, Зайцев Анатолій Якимович, Ліпатов Валерій Павлович, Білокоз Сергій Сергійович, Фількевич Олександр Сергійович
МПК: G01S 13/02
Мітки: радіолокаційна, система
Формула / Реферат:
1. Радіолокаційна система, що містить антену, обертальні переходи за кутом місця та курсовим кутом, пристрій відліку координат, пристрій вторинної обробки, відеопроцесор, процесор керування, контролер, перший та другий пристрої керування приводам, привід повороту антени, привід обертання антени, датчик кута місця, датчик курсового кута, перший процесор обміну, приймально-передавальний пристрій, що має у своєму складі когерентний гетеродин,...
Радіолокаційна станція
Номер патенту: 42179
Опубліковано: 15.10.2004
Автори: Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, Піза Дмитро Макарович
МПК: G01S 13/42, G01S 7/36, G01S 13/00
Мітки: радіолокаційна, станція
Формула / Реферат:
Радіолокаційна станція, що містить дуально-поляризовану гостроспрямовану антену і всеспрямовану антену, з`єднані з відповідними каналами приймання, пристрої компенсації завад та обробки сигналів і індикатор, яка відрізняється тим, що станція додатково містить перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого...
Попередній патент: Спосіб лагуна обробки свіжовиловлених молюсків, переважно рапани
Наступний патент: Спосіб визначення карбонільних сполук в паровій фазі харчових продуктів
Випадковий патент: Асоціація мікроорганізмів medusomyces gisevii v для одержання безалкогольних напоїв бродіння