Мініатюрний розмикач ланцюга
Формула / Реферат
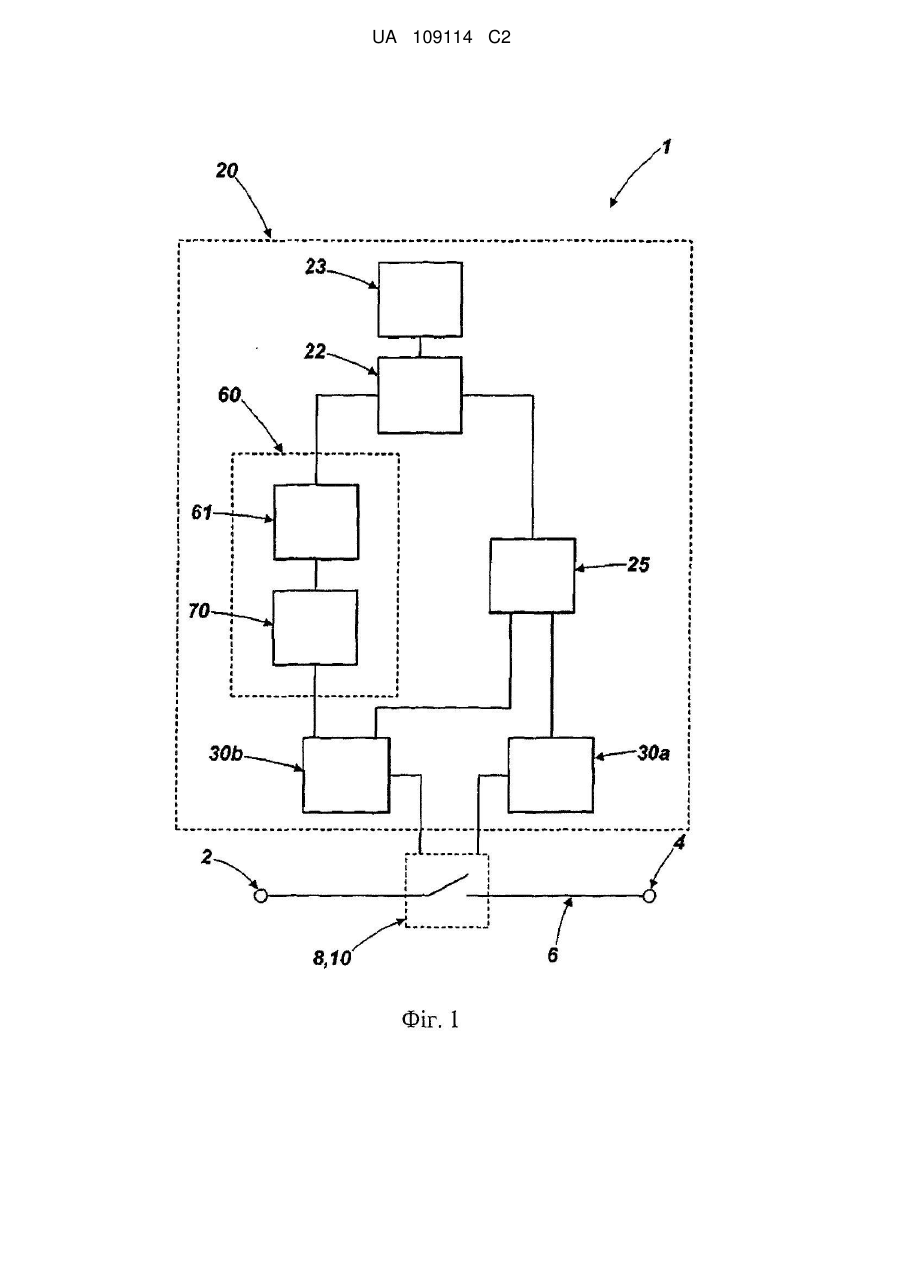
1. Мініатюрний розмикач ланцюга (МСВ), який має:
пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження;
механізм розмикання для розмикання контактів при виникненні стану надструму; і
електродвигун, виконаний з можливістю замикати контакти за допомогою механізму замикання контактів;
причому механізм розмикання включає в себе:
механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання;
датчик струму, виконаний з можливістю виявлення струму в головному ланцюгу струму; і
блок керування;
причому блок керування:
виконаний з можливістю створення сигналу розмикання для приведення в дію механізму спрацювання для приведення механізму розмикання до розмикання контактів, якщо він визначає, що виникає стан короткого замикання, основуючись на вихідному сигналі датчика струму; і
додатково виконаний з можливістю приведення в дію електродвигуна для приведення механізму розмикання контактів до розмикання контактів незалежно від механізму спрацювання, якщо він визначає, що виникає стан перевантаження.
2. МСВ за п. 1, в якому механізм розмикання контактів включає в себе накопичувач механічної енергії, виконаний з можливістю вивільнення накопиченої механічної енергії для розмикання контактів при спрацюванні механізму розмикання контактів.
3. МСВ за п. 2, в якому:
механізм розмикання контактів включає в себе защіпку, виконану так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для розмикання контактів при вивільненні защіпки; і
механізм спрацювання виконаний з можливістю запуску механізму розмикання контактів вивільненням защіпки.
4. МСВ за будь-яким із попередніх пунктів, в якому механізм спрацювання включає в себе електромеханічний привід, виконаний з можливістю приведення в дію сигналом розмикання для приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання.
5. МСВ за п. 4, в якому електромеханічний привід включає в себе соленоїд.
6. МСВ за п. 5, в якому електромеханічний привід включає в себе магнітно защеплюваний привід соленоїда.
7. МСВ за будь-яким із попередніх пунктів, в якому механізм спрацювання включає в себе:
електромеханічний привід, виконаний з можливістю приведення в дію сигналом розмикання для створення першої сили спрацювання;
механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання у другу силу спрацювання, яка більша першої сили спрацювання;
причому механізм передачі сили з'єднує електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання приводить механізм розмикання контактів до розмикання контактів.
8. МСВ за будь-яким із попередніх пунктів, в якому блок керування виконаний з можливістю приведення в дію двигуна для замикання контактів за допомогою механізму замикання контактів.
9. МСВ за будь-яким із попередніх пунктів, в якому механізм замикання контактів включає в себе накопичувач механічної енергії, виконаний з можливістю накопичувати механічну енергію в результаті роботи механізму замикання і згодом з можливістю вивільняти накопичену механічну енергію для замикання контактів.
10. МСВ за будь-яким із попередніх пунктів, в якому МСВ має корпус, який містить електродвигун, при цьому корпус МСВ відповідає стандарту DIN 43880.
11. МСВ за будь-яким із попередніх пунктів, в якому:
механізм розмикання включає в себе механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приводити механізм розмикання контактів до розмикання контактів при виникненні стану надструму;
електродвигун виконаний з можливістю зводити механізм розмикання подачею механічної енергії в накопичувач механічної енергії механізму розмикання.
12. МСВ за будь-яким із попередніх пунктів, в якому електродвигун виконаний з можливістю роботи в першому режимі, в якому елемент електродвигуна, що обертається, обертається в першому напрямку, і другому режимі, в якому елемент, що обертається, обертається у другому напрямку, протилежному першому напрямку, і причому електродвигун виконаний з можливістю роботи в першому режимі для замикання контактів і у другому режимі для зведення механізму розмикання.
13. МСВ за будь-яким із попередніх пунктів, в якому сигнал розмикання являє собою струм розмикання.
14. МСВ за будь-яким із попередніх пунктів, в якому блок керування включає в себе накопичувач електричної енергії, виконаний з можливістю створювати струм розмикання.
15. МСВ за п. 14, в якому накопичувач електричної енергії включає в себе конденсатор.
Текст
Реферат: Мініатюрний розмикач ланцюга (МСВ), що має блок керування, виконаний з можливістю створювати сигнал розмикання для приведення механізму розмикання до розмикання пари контактів, якщо він визначає, що виникає стан надструму, основуючись на вихідному сигналі датчика струму; електродвигун, виконаний з можливістю замикати контакти за допомогою механізму замикання контактів; механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання у другу силу спрацювання, яка більша першої сили спрацювання, причому механізм передачі сили з'єднує електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання приводить механізм розмикання контактів до розмикання контактів; і/або накопичувач механічної енергії, виконаний з можливістю накопичувати механічну енергію в результаті роботи замикального приводу і згодом з можливістю вивільняти накопичену механічну енергію для замикання контактів. UA 109114 C2 (12) UA 109114 C2 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Цей винахід стосується мініатюрного розмикача ланцюга. Розмикач ланцюга являє собою електричний перемикач для захисту навантаження від живлення надструмом, тобто струмом, який перевищує номінальний струм навантаження. Розмикач ланцюга звичайно включає в себе пару контактів, що розмикаються, розміщених в головному ланцюгу струму між джерелом живлення і навантаженням, і виконаний з можливістю розмикати контакти у разі виникнення стану надструму, щоб переривати подачу живлення джерела живлення. Мініатюрний розмикач ланцюга (що називається тут «МСВ») являє собою розмикач ланцюга, що належить до типу, який використовується для захисту ланцюгів керування або побутових електроприладів і, що звичайно має номінальний струм 125 А або менше, номінальну напругу 440 В (між фазами) або менше і номінальну потужність короткого замикання 25000 А або менше. Фізична модель MCB загалом має розміри, описані в стандарті DIN 43880 [EN 60898-1:2003]. Звичайно, побутова установка буде мати множину MCB, встановлених на панелі розмикача (також відомої як «розподільний щит» або «коробка з плавкими запобіжниками»). Традиційний MCB містить пару контактів, розміщених в головному ланцюгу струму між лінійною клемою для з'єднання з джерелом живлення і клемою навантаження для з'єднання з навантаженням, що живиться джерелом живлення. Традиційний MCB додатково включає в себе механізм розмикання для розмикання контактів при виникненні стану надструму. Механізм розмикання звичайно включає в себе біметалічний компонент для приведення механізму розмикання контактів до розмикання контактів при виникненні стану перевантаження, і соленоїд для приведення механізму розмикання контактів до розмикання контактів при виникненні стану короткого замикання. Стан перевантаження являє собою стан надструму, в якому є надструм, що повільно змінюється в головному ланцюгу струму, який може спричинити перегрівання навантаження. Стан короткого замикання являє собою стан надструму, в якому має місце великий стрибок надструму в головному ланцюгу струму. Механізм розмикання контактів являє собою пружинний механізм, який вивільняє накопичену механічну енергію для розмикання контактів. Традиційний MCB додатково включає в себе вручну керований важіль для замикання контактів після того, як вони розмикаються механізмом розмикання, а також для спрацювання механізму розмикання подачею механічної енергії в механізм розмикання контактів. Біметалічний компонент розміщений в головному ланцюгу струму MCB. Якщо надструм тече по ланцюгу струму, біметал починає нагріватися. Безперервне нагрівання через тривалий надструм спонукає біметал деформуватися доти, поки деформація біметалу не створить силу для приведення механізму розмикання контактів до розмикання контактів переміщенням важеля розмикання. Соленоїд має котушку, розміщену в головному ланцюгу струму MCB. Якір соленоїда утримується в положенні стопорною пружиною, але коли є великий стрибок надструму (тобто надструму короткого замикання) в головному ланцюгу струму, котушка створює магнітне поле, яке впливає на якір силою, яка долає стопорну пружину так, щоб переміщувати якір до приведення механізму розмикання контактів до розмикання контактів переміщенням важеля розмикання. Коли дуже великий надструм короткого замикання тече по ланцюгу струму, котушка соленоїда створює велике магнітне поле, яке створює велику силу, яка діє на якір соленоїда. Це переміщує якір соленоїда з високою швидкістю в контакт з важелем розмикання, таким чином забезпечуючи спрацювання механізму розмикання контактів за дуже короткий період часу. Більше того, оскільки якір переміщується з високою швидкістю, він вдаряє по важелю розмикання із силою великої величини, яка спонукає важіль розмикання переміщуватися в контакт з рухомим одним із контактів так, щоб механічно сприяти розмиканню контактів, тобто в доповнення до спрацювання механізму розмикання контактів. Це механічне сприяння допомагає запобігти зварюванню контактів за рахунок дуже великого струму, що тече між контактами. Це зварювання контактів відоме як «прихоплювальне» зварювання і представляє небезпеку при дуже великих струмах короткого замикання, наприклад 1000А-2000A. Традиційний MCB, описаний вище, дуже добре відомий і має конструкцію, яка забезпечує хороший рівень захисту від надструму при низькій вартості. Цей винахід стосується різних перетворень конструкції традиційного MCB, описаної вище. Ці перетворення призначені для подолання і/або поліпшення розв'язання проблем, які автори виявили в традиційному MCB, що обговорюється нижче. У найзагальніших рисах перший аспект винаходу забезпечує MCB, в якому датчик виявляє струм в головному ланцюгу струму, і в якому механізм розмикання здатний спрацьовувати на основі вихідного сигналу датчика. Наприклад, механізм розмикання може мати блок керування, 1 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 виконаний з можливістю створювати сигнал розмикання для приведення механізму розмикання до розмикання контактів MCB, якщо блок керування визначає, що виникає стан надструму, основуючись на вихідному сигналі датчика, наприклад, основуючись на значенні, що представляє струм в головному ланцюгу струму MCB. Час, що затрачується MCB для розмикання його контактів в результаті стану короткого замикання, може називатися «часом розмикання» MCB. Як пояснюється вище, механізм розмикання традиційного MCB приводиться до розмикання контактів MCB соленоїдом, якір якого розміщений в головному ланцюгу струму MCB. Час розмикання цього традиційного MCB залежить від кількості часу, що затрачується на подолання якорем соленоїда стопорної пружини так, щоб спрацьовувати під дією соленоїда, після того, як виникає надструм короткого замикання. Цей час в свою чергу залежить від точки на епюрі напруги струму в головному ланцюгу струму, коли виникає надструм короткого замикання, оскільки якщо виникає надструм в помилковій точці на епюрі напруги, може бути недостатньо енергії, доступної якорю соленоїда, для подолання стопорної пружини протягом півперіоду останньої епюрі напруги останнього. У зв'язку з цим, час розмикання традиційного MCB звичайно може змінюватися між приблизно 4 і 9 мс залежно від точки на епюрі напруги, в якій виникає надструм короткого замикання. MCB згідно з першим аспектом винаходу може забезпечувати спрацювання механізму розмикання, як тільки надструм виявляється датчиком, при цьому не обов'язково повинен бути обмежений кількістю енергії, доступної в головному ланцюгу струму, коли виникає надструм. Таким чином, MCB може мати час розмикання, який коротший і/або є більш відповідним, ніж в традиційному MCB. Коротший час розмикання являє собою перевагу, оскільки це означає, що через MCB пропускається менше енергії у разі надструму короткого замикання. Зазначимо, що ні соленоїд, ні біметалічний компонент традиційних MCB не здатний виявляти струм в головному ланцюгу струму MCB. Більш того, ні соленоїд, ні біметалічний компонент не визначає чи виникає стан надструму, основуючись на вихідному сигналі датчика. Точніше, соленоїд і біметалічний компонент являють собою реактивні елементи, які зазнають фізичної зміни під впливом стану надструму, причому фізична зміна спонукає спрацьовувати механізм розмикання контактів. У зв'язку з цим, перший аспект винаходу може забезпечувати MCB, що має: пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження; і механізм розмикання для розмикання контактів при виникненні стану надструму, причому механізм розмикання включає в себе: датчик струму, виконаний з можливістю виявлення струму в головному ланцюгу струму; і блок керування, виконаний з можливістю створення сигналу розмикання для приведення механізму розмикання до розмикання контактів, якщо він визначає, що виникає стан надструму, основуючись на вихідному сигналі датчика струму. Стан надструму, який виникає, може, наприклад, бути станом короткого замикання, тобто великим стрибком надструму або станом перевантаження, тобто надструмом, що повільно змінюється, який може спричиняти перегрівання навантаження. Такі стани надструму цілком зрозумілі, при цьому блок керування може бути виконаний з можливістю визначати чи виник стан надструму, основуючись на вихідному сигналі датчика струму відповідно. Блок керування може бути будь-яким доцільним блоком, який здатний виконувати визначення, чи існує стан надструму. Наприклад, блок керування може бути забезпечений схемою, прийнятною для виконання такого визначення. Датчик струму може бути будь-яким елементом, який може бути використаний для виявлення струму. Вихідний сигнал датчика струму може бути сигналом, що має значення, яке представляє струм в головному ланцюгу струму. Датчики струму добре відомі і далі не обговорюються детально. Наприклад, датчик струму може включати в себе перетворювач струму, який забезпечує значення струму, що представляє значення струму в головному ланцюгу струму. Інші типи датчика струму також можуть бути придатні. Сигнал розмикання не обмежений яким-небудь особливим типом сигналу. Сигнал розмикання може бути різним сигналом, згідно з яким стан надструму визначається як такий, що виник. Таким чином, сигнал розмикання може бути сигналом розмикання при короткому замиканні, якщо блок керування визначає, що виникає стан короткого замикання (наприклад, якщо струм перевищує порогове значення) або сигналом розмикання при перевантаженні, якщо блок керування визначає, що виникає стан перевантаження (наприклад, якщо струм перевищує порогове значення протягом заданої кількості часу). 2 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Механізм розмикання може включати в себе механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання. Механізм розмикання контактів може бути будь-яким доцільним механізмом, який здатний розмикати контакти при спрацюванні. Механізм розмикання контактів може бути схожим на механізм розмикання контактів традиційного MCB. Таким чином, механізм розмикання контактів може включати в себе накопичувач механічної енергії, наприклад, пружину або множину пружин, виконаних з можливістю вивільнення накопиченої механічної енергії для розмикання контактів при спрацюванні механізму розмикання контактів. Механізм розмикання контактів може включати в себе защіпку, наприклад механічну защіпку, виконану так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для розмикання контактів при вивільненні защіпки. Таким чином, механізм спрацювання може бути виконаний з можливістю запуску механізму розмикання контактів вивільненням защіпки. Защіпка може бути звільнена переміщенням, наприклад, важеля розмикання. Механізм спрацювання включає в себе електромеханічний привід, що приводиться в дію сигналом розмикання для приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання. Механізми спрацювання традиційних MCB включають в себе соленоїд і біметалічний компонент. Незважаючи на те, що соленоїд і біметалічний компонент традиційного MCB являють собою електромеханічні приводи, вони безпосередньо приводяться в дію надструмом в головному ланцюгу струму, а не сигналом розмикання з блока керування, як в першому аспекті винаходу. Електромеханічний привід може включати в себе соленоїд. Соленоїд звичайно включає в себе котушку і якір. Котушка може бути виконана такою, що приводиться в дію сигналом розмикання, в результаті створюючи силу, що діє на якір при створенні сигналу розмикання. Переважно, електромеханічний привід включає в себе магнітно защеплюваний привід соленоїда, наприклад який описаний в зв'язку з третім аспектом винаходу. Сигнал розмикання, створений блоком керування, може бути струмом розмикання, тобто струмом для приведення в дію електромеханічного приводу. Таким чином, електромеханічний привід може бути приведений в дію струмом, що подається блоком керування, а не струмом, що подається безпосередньо від ланцюга струму, як в традиційному MCB. Блок керування може включати в себе накопичувач електричної енергії, виконаний з можливістю створення струму розмикання. Накопичувач електричної енергії може включати в себе, наприклад, конденсатор або батарею. Конденсатор є переважним, як накопичувач електричної енергії, оскільки конденсатор звичайно здатний забезпечувати швидку розрядку відносно великого струму. Це може допомогти електромеханічному приводу створювати велику силу при приведенні в дію струмом розмикання. Електромеханічний привід може забезпечувати спрацювання механізму розмикання контактів за допомогою одного або більше інших компонентів в механізмі спрацювання. Переважно, механізм спрацювання описаний в зв'язку з третім аспектом винаходу, при цьому сигнал розмикання використовується для приведення в дію електромеханічного приводу. У зв'язку з цим, механізм спрацювання може включати в себе: електромеханічний привід, що приводиться в дію сигналом розмикання для створення першої сили спрацювання; механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання у другу силу спрацювання, більшу першої сили спрацювання; причому механізм передачі сили з'єднує електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання приводить механізм розмикання контактів до розмикання контактів. Як пояснено детальніше в зв'язку з третім аспектом винаходу, особлива перевага цієї конструкції полягає в тому, що механізм передачі сили здатний збільшувати силу, створену електромеханічним приводом, щоб механічно сприяти розмиканню контактів механізмом розмикання контактів. Таке механічне сприяння може бути важко досяжним без цього збільшення сили. Блок керування може бути виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів незалежно від механізму спрацювання. Наприклад, блок керування може бути виконаний з можливістю приведення в дію електромеханічного приводу (наприклад, електродвигуна, описаного в зв'язку з другим аспектом винаходу), щоб забезпечувати спрацювання механізму розмикання контактів незалежно від механізму спрацювання. Це може допомогти запобігти зносу механізму спрацювання, який може включати в себе компонент, чутливий до зносу, наприклад защіпку і/або пружину. 3 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Блок керування може бути виконаний з можливістю створення сигналу розмикання для приведення в дію механізму спрацювання для приведення механізму розмикання контактів до розмикання контактів, якщо він визначає, що виникає стан короткого замикання, наприклад створенням сигналу розмикання при короткому замиканні. Це може бути корисним, оскільки контакти повинні бути розімкнені максимально швидко в станах короткого замикання. З іншого боку, контакти необов'язково розмикати якнайшвидше в станах перевантаження. У зв'язку з цим, блок керування може бути виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів незалежно від механізму спрацювання, якщо він визначає, що виникає стан перевантаження, наприклад створенням сигналу розмикання при перевантаженні. Це може допомогти запобігти зносу механізму спрацювання. Блок керування може бути виконаний з можливістю визначення, чи виникає стан надструму, основуючись на пороговому значенні (або множині порогових значень). Блок керування може бути виконаний з можливістю визначення того, що стан короткого замикання виникає, якщо струм в головному ланцюгу струму перевищує порогове значення. Блок керування може бути виконаний з можливістю визначення того, що стан перевантаження виникає, якщо струм в головному ланцюгу струму перевищує порогове значення протягом заданої кількості часу. Порогове(і) значення(я) можуть бути регульованими. Таким чином, користувач може бути здатний регулювати надструм(и), при якому(их) блок керування приводить механізм розмикання до розмикання його контактів, регулюванням порогового(их) значення(ь). Порогове(і) значення(я) можуть бути регульованими в межах заданого діапазону значень. Межа може бути розміщена в діапазоні значень, в межах якого порогове значення може регулюватися діапазоном струмів, що вимірюються датчиком струму. Однак, навіть якщо у випадку, коли пороговий струм, при якому MCB розмикає контакти, може регулюватися в межах значно ширшого діапазону, тоді в традиційному MCB, в якому струм, при якому MCB розмикає контакти, може регулюватися тільки на дуже невеликі величини фізичним регулюванням соленоїда або біметалічного компонента MCB (наприклад, використанням калібрувального гвинта) або заміною соленоїда або біметалічного компонента. Блок керування може бути виконаний з можливістю визначення, чи виникає стан надструму, основуючись на номінальному струмі (In), струмі миттєвого розмикання і/або типі миттєвого розмикання. «Номінальний струм» (In) може бути визначений, як струм, який MCB виконаний з можливістю провести безперервно (без розмикання). Струм миттєвого розмикання може бути визначений як мінімальний струм, при якому MCB розмикає його контакти в межах періоду 100 мс, він звичайно визначається кратним In (номінальному струму). Діапазони миттєвих номінальних струмів можуть бути класифіковані згідно з типом миттєвого розмикання, який вказаний далі: Тип В: 3-5In Тип C: 5-10In Тип D: 10-20In Номінальний струм, струм миттєвого розмикання і/або тип миттєвого розмикання можуть(же) бути регульованими(им). Блок керування може бути виконаний з можливістю замикання контактів за допомогою механізму замикання контактів, наприклад приведенням в дію замикального приводу, такого як електродвигун. Таким чином, при необхідності контакти можуть бути замкнені блоком керування, а не замиканням вручну користувачем. Це дозволяє блоку керування діяти як перемикач ввімк./вимк. для ланцюга струму. MCB може включати в себе електродвигун і механізм замикання контактів, які описані в зв'язку з другим аспектом винаходу. Блок керування може бути виконаний з можливістю приведення в дію електродвигуна для замикання контактів за допомогою механізму замикання контактів. Блок керування може бути виконаний з можливістю приведення в дію електродвигуна для розмикання контактів незалежно від механізму спрацювання, наприклад спрацюванням механізму розмикання контактів. MCB може включати в себе замикальний привід і механізм замикання контактів, які описані в зв'язку з четвертим аспектом винаходу. Блок керування може бути виконаний з можливістю приведення в дію замикального приводу для замикання контактів. Загалом кажучи, другий аспект винаходу забезпечує MCB, що має електродвигун, виконаний з можливістю замикання контактів MCB. Як пояснюється вище, контакти в традиційному MCB замикаються вручну керованим важелем. Автори виявили перевагу у використанні електродвигуна для замикання контактів MCB, оскільки це забезпечує автоматичне замикання контактів MCB, тобто замикання контактів без втручання користувача. Електродвигун виконаний з можливістю замикання контактів за допомогою механізму замикання контактів. 4 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Автори виявили, що електродвигун є високо придатним для використання як привід для автоматичного замикання (і розмикання) контактів MCB, оскільки електродвигуни здатні створювати відносно великі сили, тобто крутний момент, відносно до їх розмірів. Величина сили, що створюється електродвигуном, є важливою, оскільки для замикання контактів MCB і/або для подачі механічної енергії іншим механізмам всередині MCB (наприклад, механізму спрацювання або механізму розмикання контактів) може бути необхідна більша величина сили. У зв'язку з цим, другий аспект винаходу може забезпечувати MCB, що має: пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження; механізм розмикання для розмикання контактів при виникненні стану надструму; і електродвигун, виконаний з можливістю замикання контактів за допомогою механізму замикання контактів. MCB може мати корпус для вміщення його компонентів, наприклад контактів, електродвигуна, механізму замикання контактів і/або механізму розмикання. У зв'язку з цим, винахід може забезпечувати MCB, що має корпус, наприклад з традиційним розміром, який містить електродвигун. Корпус MCB (який містить електродвигун) переважно відповідає стандарту DIN 43880. Стандарт DEST 43880 рекомендує три різні розміри корпусу (або каркаса), які позначаються розмірами «1», «2» і «3». Корпус MCB другого аспекту винаходу переважно відповідає розміру «1» стандарту DIN 43880, оскільки більшість MCB мають розмір «1». Розмір «1» стандарту DIN 43880 встановлює ширину полюса 17,5-18 мм, розмір клема-клема 90 мм, передню висоту від монтажної рейки DIN 70 мм і ширину «плеча» 44,5 мм - 45,5 мм. Стандарт DIN 43880 допускає відхилення від передньої висоти від монтажної рейки DIN 70 мм, і в зв'язку з цим, корпус MCB другого аспекту винаходу може перевищувати цей стандарт 70 мм, але відповідає стандарту DIN 43880 в інших відношеннях. Як описано вище, традиційний MCB має соленоїд і біметалічний компонент для приведення механізму розмикання контактів до розмикання його контактів. Вузол соленоїда звичайно виконаний з можливістю обслуговування струмів до 63 А, і в зв'язку з цим, займає велику величину об'єму всередині традиційного MCB. Подібним чином, вузол біметалічного компонента, який може включати в себе нагрівники для режимів роботи з малим навантаженням, також займає великий об'єм всередині традиційного MCB. Простір, що займає вузол біметалічного компонента, є обов'язково великим, оскільки він повинен забезпечувати каліброване регулювання, прогин біметалічного компонента при виникненні станів надструму і додатковий прогин біметалічного компонента при надструмах короткого замикання навіть не будучи занадто обмеженим, так що перенапруга і/або втрата калібрування біметалічного компонента стає ризикованою. У зв'язку з цим, традиційний MCB вже заповнений механізмами і приводами так, що буде дуже важко включити в нього електродвигун в межах меж корпусу традиційного MCB, зокрема тих корпусів, які відповідають стандарту DIN 43880. Механізм розмикання MCB може включати в себе датчик струму, виконаний з можливістю виявлення струму в головному ланцюгу струму; і блок керування, виконаний з можливістю створення сигналу розмикання для приведення механізму розмикання до розмикання контактів, якщо він визначає, що виникає стан надструму, основуючись на вихідному сигналі датчика струму. Маючи механізм розмикання, що включає в себе датчик струму і блок керування, необов'язково для MCB мати великі вузли соленоїда і біметалічного компонента, які представлені в традиційному MCB. У зв'язку з цим, відсутність вузлів соленоїда і біметалічного компонента дозволяє кріпити електродвигун в межах кордонів корпусу MCB простіше. Механізм розмикання, що включає в себе датчик струму і блок керування, може бути таким, як описано в зв'язку з першим аспектом винаходу. Механізм розмикання може включати в себе механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів при виникненні стану надструму. Механізм розмикання контактів може бути будь-яким доцільним механізмом, який здатний розмикати контакти при виникненні стану надструму. Механізм розмикання контактів може бути схожим на механізм розмикання контактів традиційного MCB. Таким чином, механізм розмикання контактів може включати в себе накопичувач механічної енергії, наприклад пружину або множинні пружини, виконані з можливістю вивільнення накопиченої механічної енергії для розмикання контактів при спрацюванні механізму розмикання контактів. Механізм розмикання контактів може включати в себе защіпку для свого накопичувача механічної енергії, наприклад механічну защіпку. Защіпка може бути виконана 5 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для розмикання контактів при вивільненні защіпки. Таким чином, механізм спрацювання може бути виконаний з можливістю запуску механізму розмикання контактів вивільненням защіпки. Защіпка може бути звільнена переміщенням, наприклад, важеля розмикання. Механізм спрацювання може включати в себе накопичувач механічної енергії, наприклад пружину або множинні пружини, виконані з можливістю вивільнення накопиченої механічної енергії для спрацювання механізму розмикання контактів при виникненні стану надструму. Наприклад, механізм спрацювання може бути таким, як описано в зв'язку з третім аспектом винаходу, в якому механізм передачі сили може включати в себе накопичувач механічної енергії. Однак, механізму спрацювання необов'язково мати накопичувач механічної енергії, наприклад він може бути соленоїдом або біметалічним компонентом, як в традиційному MCB. Електродвигун може бути виконаний з можливістю зводити механізм розмикання подачею механічної енергії в накопичувач механічної енергії механізму розмикання, наприклад в накопичувач механічної енергії механізму розмикання контактів (якщо присутній) і/або в накопичувач механічної енергії механізму спрацювання (якщо присутній). Таким чином, механізм розмикання може бути зведений без ручної подачі користувачем механічної енергії в накопичувач(і) механічної енергії, на відміну від традиційного MCB, в якому механічна енергія подається в механізм розмикання контактів вручну керованим важелем. Електродвигун може бути виконаний з можливістю розмикання контактів, наприклад приведенням механізму розмикання контактів до розмикання контактів. Таким чином, електродвигун може дозволяти MCB працювати як перемикач ввімк./вимк. Електродвигун може бути виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів незалежно від механізму спрацювання. Це може допомогти уникнути зносу механізму спрацювання, який може включати в себе компонент, сприйнятливий до зносу, наприклад защіпку і/або пружину. Електродвигун може бути виконаний з можливістю розмикання контактів за допомогою механізму розмикання контактів при виникненні стану надструму. Зокрема, електродвигун може бути виконаний з можливістю розмикання контактів при виникненні стану перевантаження. Це може бути корисно, якщо електродвигун розмикає контакти дуже повільно, щоб бути ефективним у стані струму короткого замикання (наприклад, де може бути використаний механізм спрацювання), але може надійно розмикати контакти в стані перевантаження (в якому надструми нижче). Електродвигун може бути виконаний з можливістю роботи в першому режимі, в якому обертаний елемент електродвигуна (наприклад, вал) обертається в першому напрямку, і другому режимі, в якому обертаний елемент обертається у другому напрямку, протилежному першому напрямку. Таким чином, електродвигун може бути виконаний з можливістю роботи в двох напрямках, тобто за годинниковою стрілкою і проти годинникової стрілки, а не тільки в одному напрямку. Електродвигун може бути виконаний з можливістю роботи в першому режимі для замикання контактів. Електродвигун може бути виконаний з можливістю роботи у другому режимі для зведення механізму розмикання, наприклад, подачею механічної енергії в накопичувач механічної енергії механізму спрацювання і/або механізму розмикання контактів, як описано вище. Це може допомогти зменшити навантаження на двигун, оскільки в цей час двигуну не треба замикати контакти і зводити механізм розмикання. Переважно, електродвигун виконаний з можливістю взводу механізму розмикання подачею механічної енергії в накопичувач механічної енергії механізму спрацювання у другому режимі, оскільки накопичувач механічної енергії механізму спрацювання може вимагати великої кількості механічної енергії, що зводить, наприклад якщо повинна бути накопичена механічна енергія, достатня для механічного сприяння розмиканню контактів, як описано в зв'язку з третім аспектом винаходу. Електродвигун може бути виконаний з можливістю роботи у другому режимі для розмикання контактів, наприклад за допомогою механізму розмикання контактів, який описаний вище. Механізм замикання контактів може включати в себе кулачок або множину кулачків. Електродвигун може бути виконаний з можливістю замикання контактів за допомогою кулачка(ів). Ця конструкція має перевагу, оскільки кулачки виявили меншу чутливість до несприятливих впливів продуктів зношування, які звичайно створюються всередині MCB під час станів короткого замикання за рахунок дугоутворення між контактами, ніж інші типи з'єднуючих елементів (наприклад, зуб'я, шестерні). Такі продукти зношування можуть погіршувати характеристики MCB, якщо вони стикаються з механізмом замикання контактів. Електродвигун може бути двигуном постійного струму. Електродвигун може бути редукторним двигуном. Двигуни постійного струму і зокрема, редукторні двигуни постійного 6 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 струму мають тенденцію мати великий крутний момент: відношення розмірів. У зв'язку з цим, ці двигуни особливо придатні для використання в MCB, в якому простір може бути дуже обмежений. Електродвигун може мати номінальна напруга 24 В або менше, 12 В або менше або 6 В або менше, оскільки струм може бути обмежений, наприклад якщо електродвигун приводиться в дію блоком керування. Електродвигун може бути виконаний з можливістю створювати крутний момент 30 мНм або більше, 40 мНм або більше або 50 мНм або більше. Виявлено, що такі моменти сили зокрема придатні для замикання контактів MCB, а також для забезпечення інших функцій, наприклад зведення механізму розмикання. Якщо використовується редукторний двигун постійного струму, тоді редукторний двигун постійного струму може мати передавальне відношення 100:1 або більше, 200:1 або більше або 300:1 або більше, оскільки ці передавальні відношення виявлені ефективними при створенні цих моментів сили. MCB може мати механізм спрацювання, який описаний в зв'язку з третім аспектом винаходу. Електродвигун може виконуватися з можливістю взводу механізму спрацювання подачею механічної енергії, наприклад в накопичувач механічної енергії механізму передачі сили, описаного в зв'язку з третім аспектом винаходу. MCB може мати механізм замикання контактів, який описаний в зв'язку з четвертим аспектом винаходу. У зв'язку з цим, електродвигун може діяти як «привід, що замикає», описаний в зв'язку з четвертим аспектом винаходу. Загалом кажучи, третій аспект винаходу забезпечує MCB, що має механізм розмикання, що включає в себе механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання, створеної електромеханічним приводом, у другу силу спрацювання, більшу першої сили спрацювання, для приведення механізму розмикання контактів до розмикання контактів MCB. Перша сила розмикання може обумовлюватися станом надструму, що виникає в MCB. У зв'язку з цим, третій аспект винаходу пов'язаний із збільшенням сили спрацювання, створеної електромеханічним приводом так, щоб приводити механізм розмикання контактів до розмикання контактів MCB. Збільшена сила спрацювання може допомогти в механічному сприянні при розмиканні контактів механізмом розмикання контактів і/або в збільшенні швидкості розмикання контактів механізмом розмикання контактів. У зв'язку з цим, третій аспект винаходу може забезпечувати MCB5 що має: пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження; і механізм розмикання, що включає в себе механізм спрацювання і механізм розмикання контактів для розмикання контактів при виникненні стану надструму, причому механізм спрацювання включає в себе: електромеханічний привід, виконаний з можливістю приводитися в дію струмом розмикання для створення першої сили спрацювання; механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання у другу силу спрацювання, більшу першої сили спрацювання; причому механізм передачі сили з'єднує електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання приводить механізм розмикання контактів до розмикання контактів. Механізм передачі сили може з'єднувати електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання механічно сприяє розмиканню контактів механізмом розмикання контактів, тобто в доповнення до спрацювання механізму розмикання контактів. Механізм розмикання контактів повинен бути здатний розмикати контакти самостійно. У зв'язку з цим, механічне сприяння другою силою спрацювання буде додатковим засобом, а не засобом, що заміняє, розмикання контактів механізмом розмикання контактів. Механічне сприяння розмиканню контактів другою силою спрацювання може допомагати зменшувати час, що затрачується механізмом розмикання контактів на розмикання контактів. У доповнення, механічне сприяння другою силою спрацювання може допомагати запобігати зварюванню контактів у разі виникнення стану дуже великого надструму короткого замикання, тобто «прихоплювальне» зварювання, яке може відбуватися при дуже великих надструмах, наприклад 1000А-2000А. Механізм передачі сили може включати в себе елемент спрацювання, який виконаний переміщуваним другою силою спрацювання для приведення механізму розмикання контактів до розмикання контактів. У зв'язку з цим, перетворення першої сили спрацювання у більшу другу силу спрацювання може зменшувати час, що затрачується механізмом розмикання контактів на 7 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 спрацювання, оскільки елемент спрацювання може переміщатися з вищою швидкістю, ніж якби він переміщався (меншою) першою силою спрацювання. Елемент спрацювання може забезпечувати спрацювання механізму розмикання переміщенням в контакт з механізмом розмикання контактів. Переважно, елемент спрацювання забезпечує спрацювання механізму розмикання контактів ударом по механізму розмикання контактів, наприклад ударом по важелю розмикання механізму розмикання контактів. Ударна дія виявлена особливо ефективною в запобіганні «прихоплювального» зварювання, якщо елемент спрацювання виконаний з можливістю механічного сприяння розмиканню контактів. Однак, елемент спрацювання може забезпечувати спрацювання механізму розмикання контактів опосередковано, тобто за допомогою одного або більше інших елементів так, що елемент спрацювання не контактує з механізмом розмикання контактів безпосередньо. Елемент спрацювання може бути виконаний переміщуваним другою силою спрацювання для механічного сприяння розмиканню контактів механізмом розмикання контактів. Елемент спрацювання може бути виконаний з можливістю механічного сприяння розмиканню контактів передачею рушійної сили рухомому одному з контактів (від елемента спрацювання). Передача рушійної сили може бути спрямована, наприклад, елементом спрацювання безпосередньо, що контактує з рухомим одним із контактів, або опосередковано, наприклад елементом спрацювання, що контактує з одним або більше іншими елементами, які далі контактують з рухомим одним із контактів. Наприклад, рушійна сила може бути передана від елемента спрацювання рухомому одному з контактів переміщенням елемента спрацювання в контакт з важелем розмикання, який далі переміщується в контакт з рухомим одним із контактів. Елемент спрацювання може бути рухомо встановлений в MCB. Наприклад, елемент спрацювання може бути встановлений з можливістю ковзати або встановлений з можливістю обертатися в MCB, наприклад в корпусі MCB. Елемент спрацювання може, наприклад, бути штифтом, встановленим з можливістю ковзання в MCB (наприклад, як «штифт розмикання», описаний детальніше нижче), або важелем, встановленим з можливістю обертання в MCB (наприклад, як «важіль повернення пружини», описаний детальніше нижче). Механізм розмикання контактів може бути будь-яким доцільним механізмом, який здатний розмикати контакти при спрацюванні. Механізм розмикання контактів може бути схожим на механізм розмикання контактів традиційного MCB. Таким чином, механізм розмикання контактів може включати в себе накопичувач механічної енергії, наприклад пружину або множинні пружини, виконані з можливістю вивільняти накопичену механічну енергію для розмикання контактів, якщо спрацьовує механізм розмикання контактів. Механізм розмикання контактів може включати в себе защіпку, наприклад механічну защіпку, виконану так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для розмикання контактів при вивільненні защіпки. Таким чином, механізм передачі сили може з'єднувати електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання забезпечує спрацювання механізму розмикання контактів вивільненням защіпки. Защіпка може бути звільнена, наприклад, переміщенням важеля розмикання. Механізм передачі сили може бути будь-яким доцільним механізмом для перетворення першої сили спрацювання у більшу другу силу спрацювання. Механізм збільшення сили може бути виконаний з можливістю перетворення сили, що діє, опосередковано, тобто створенням другої сили спрацювання, а не безпосередньо перетворенням/збільшенням першої сили спрацювання у другу силу спрацювання. Механізм передачі сили може включати в себе накопичувач механічної енергії, наприклад пружину або множинні пружини, виконані з можливістю вивільняти накопичену енергію для створення другої сили спрацювання при створенні першої сили спрацювання. Накопичувач механічної енергії є переважним для створення другої сили спрацювання, оскільки накопичувачі механічної енергії добре придатні для швидкого вивільнення великої кількості енергії з можливістю створення великої сили. Механізм передачі сили може включати в себе защіпку, наприклад механічну защіпку, виконану так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для створення другої сили спрацювання при вивільненні защіпки. Таким чином, механізм передачі сили може бути виконаний так, що перша сила спрацювання вивільняє защіпку, тобто спонукає защіпку звільнятися. Защіпка може бути звільнена переміщенням важеля, наприклад важеля вивільнення пружини, який описаний нижче. Електромеханічний привід може включати в себе соленоїд. Соленоїд звичайно містить котушку і якір. Котушка може бути виконана так, що приводиться в дію струмом розмикання з можливістю створення першої сили спрацювання для впливу на якір при створенні струму 8 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 розмикання. Таким чином, сила, що діє, може бути виконана з можливістю переміщувати соленоїд при створенні струму розмикання. Переважно, електромеханічний привід включає в себе магнітно защеплюваний привід соленоїда. Магнітно защеплюваний привід соленоїда може включати в себе: котушку, виконану так, що приводиться в дію струмом розмикання з можливістю створення першої сили для впливу на якір при створенні струму розмикання; пружину, яка виконана з можливістю створення пружної сили для впливу на якір; постійний магніт, виконаний з можливістю створення стримуючої сили, яка впливає на якір для щонайменше урівноваження пружної сили; причому привід виконаний так, що перша сила спонукає пружну силу долати стримуючу силу так, що пружина створює другу силу, яка впливає на якір. Таким чином, постійний магніт діє як магнітна защіпка для магнітно защеплюваного приводу соленоїда, причому защіпка вивільняється силою, забезпеченою котушкою. У цьому контексті мається на увазі, що «постійний» магніт означає магніт, який створює магнітне поле при відсутності прикладеного магнітного поля. Постійний магніт може включати в себе магніт з рідкісноземельних металів, тобто магніт, що містить сплав рідкісноземельного елемента, оскільки магніти з рідкісноземельних металів особливо сильні. Постійний магніт може включати в себе магнітну пластину, наприклад яка описується детальніше нижче. Магнітно защеплюваний привід соленоїда може бути забезпечений каркасом для вміщення котушки, якоря, пружини і постійного магніту. Магнітно защеплюваний привід соленоїда є переважним як електромеханічний привід, оскільки він особливо ефективний при створенні великої магнітної сили відносно струму, що подається, за рахунок збільшення сили пружиною. Це може бути особливо ефективно, коли струм розмикання, що подається в електромеханічний привід, являє собою струм, що створює блок керування, оскільки струм, що подається блоком керування, може бути меншим порівняно зі струмом в головному ланцюгу струму (дивись нижче). Таким чином, друга сила, що створюється магнітно защеплюваним приводом соленоїда може діяти як «перша сила спрацювання» MCB. Однак, оскільки магнітно защеплюваний привід соленоїда збільшує першу силу до другої сили, більшої першої сили, пружина і постійний магніт можуть діяти як «механізм передачі сили» MCB. У цьому випадку, котушка і якір діють як «електромеханічний привід» MCB з першою силою, що діє як «перша сила спрацювання», і другою силою, що діє як «друга сила спрацювання» MCB. Струм розмикання, який приводить в дію електромеханічний привід, може бути надструмом в головному ланцюгу струму. У зв'язку з цим, електромеханічний привід може бути соленоїдом, котушка якого розміщена в головному ланцюгу струму, як в традиційному MCB. Однак, автори виявили, що третій аспект винаходу є особливо ефективним там, де струм розмикання не є струмом, що подається безпосередньо від ланцюга струму, наприклад де струм розмикання створюється блоком керування, як описано з посиланням на перший аспект винаходу. Причина цього полягає в тому, що струм розмикання, який не подається безпосередньо з ланцюга струму, може бути набагато меншим ніж струм в головному ланцюгу струму, у разі чого сила, створена електромеханічним приводом, може бути набагато меншою, ніж якби струм розмикання був поданий безпосередньо з ланцюга струму. Якщо сила, створена електромеханічним приводом, була створена для спрацювання механізму розмикання контактів без механізму передачі сили, то час, що затрачується на розмикання контактів, може збільшуватися, або сила, що створюється електромеханічним приводом, не може бути досить великою для механічного сприяння розмиканню контактів механізмом розмикання контактів, як описано вище. У зв'язку з цим, збільшення сили, забезпечене механізмом передачі сили, може дозволяти блоку керування приводити в дію механізм спрацювання для розмикання контактів із силою, яка є сумірною із силою, створеною соленоїдом традиційного MCB при відсутності дуже великого надструму, навіть якщо струм розмикання, що створюється блоком керування, є слабким. Це може, наприклад, допомагати другій силі спрацювання механічно сприяти розмиканню контактів, наприклад, уникати «прихоплювального» зварювання, як описано вище. У зв'язку з цим, механізм розмикання може включати в себе: датчик розмикання, виконаний з можливістю виявлення струму в головному ланцюгу струму; і блок керування, виконаний з можливістю створення струму розмикання для приведення в дію електромеханічного приводу, якщо він визначає, що виникає стан надструму, основуючись на вихідному сигналі датчика струму. Таким чином, струм розмикання створюється блоком керування, а не подається 9 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 безпосередньо з ланцюга струму. Датчик струму і блок керування можуть бути такими, як описано в зв'язку з першим аспектом винаходу. MCB може включати в себе електродвигун і механізм замикання контактів, які описані в зв'язку з другим аспектом винаходу, і/або замикальний привід і механізм замикання контактів, які описані в зв'язку з четвертим аспектом винаходу. Загалом кажучи, четвертий аспект винаходу забезпечує MCB, що має механізм замикання контактів, що включає в себе накопичувач механічної енергії, виконаний з можливістю накопичувати механічну енергію від замикального приводу, виконаного з можливістю замикати контакти MCB, причому накопичувач механічної енергії додатково виконаний з можливістю вивільняти накопичену механічну енергію для замикання контактів MCB. Таким чином, накопичувач механічноїенергії може допомагати замикати контакти швидше, наприклад вивільненням накопиченої механічної енергії за період часу, який коротший часу, що затрачується на накопичення енергії. Замикання контактів з більшою швидкістю допомагає зменшувати ймовірність створення електричних дуг і/або зменшувати небезпеку таких дуг. У зв'язку з цим, четвертий аспект винаходу може забезпечувати MCB, що має: пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження; механізм розмикання для розмикання контактів при виникненні стану надструму; і замикальний привід виконаний з можливістю замикати контакти за допомогою механізму замикання контактів; причому механізм замикання контактів включає в себе накопичувач механічної енергії, виконаний з можливістю накопичення механічної енергії в результаті роботи замикального приводу і згодом з можливістю вивільняти накопичену механічну енергію для замикання контактів. Накопичувач механічної енергії може бути виконаний з можливістю вивільнення заданої кількості накопиченої механічної енергії для замикання контактів. Таким чином, кількість накопиченої механічної енергії, що вивільняється накопичувачем механічної енергії механізму замикання контактів, може бути вибрана такою, що дорівнює кількості для замикання контактів з необхідною швидкістю незалежно від швидкості, з якою енергія подається в накопичувач механічної енергії приводом, що замикає. Це особливо ефективно, якщо для замикання контактів з дуже низькою швидкістю тільки замикальний привід створює механічну енергію. Накопичена механічна енергія, що вивільняється накопичувачем механічної енергії, необов'язково є всією механічною енергією, накопиченою в результаті роботи замикального приводу, оскільки наприклад, накопичувач механічної енергії може бути виконаний з можливістю використання частини накопиченої механічної енергії для впливу на рухомий контакт, щоб створювати контактний тиск після замикання контактів. Механізм замикання контактів може бути виконаний так, що швидкість, з якою механічна енергія вивільняється накопичувачем механічної енергії, вища швидкості, з якою енергія накопичується накопичувачем механічної енергії. Подібним чином, накопичувач механічної енергії може бути виконаний з можливістю вивільнення механічної енергії за період часу, який коротший часу, що затрачується накопичувачем механічної енергії на накопичення механічної енергії в результаті роботи замикального приводу. Таким чином, накопичувач механічної енергії здатний замикати контакти швидше, ніж якби механічна енергія від замикального приводу використовувалася безпосередньо для замикання контактів. Замикальний привід може бути вручну керованим приводом, наприклад який використовується в традиційному MCB. Однак, замикальний привід переважно являє собою електропривід, що виконується з можливістю замикання контактів, наприклад електродвигун. У зв'язку з цим, електропривід і замикальний механізм можуть бути такими, як описано в зв'язку з другим аспектом винаходу. Автори виявили, що накопичувач механічної енергії може бути особливо ефективним, якщо замикальний привід являє собою електропривід, оскільки може бути досягнуте швидке замикання контактів, навіть в тих станах, в яких електропривід створює механічну енергію з повільною швидкістю. Механізм замикання контактів може включати в себе перешкоджаючий елемент, здатний переміщатися з можливістю перешкоджання замиканню контактів. Накопичувач механічної енергії може бути виконаний з можливістю накопичення механічної енергії в результаті роботи замикального приводу, якщо перешкоджаючий елемент перешкоджає контактам. Накопичувач механічної енергії може бути виконаний з можливістю вивільнення накопиченої механічної енергії, якщо перешкоджаючий елемент переміщується з положення перешкоджання. Механізм замикання контактів може бути виконаний так, що положення перешкоджаючого елемента 10 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 залежить від величини, з якою замикальний привід приводиться в дію, наприклад величини, з якою двигун обертається, якщо замикальний привід являє собою двигун. Механізм замикання контактів може бути виконаний з можливістю переміщувати перешкоджаючий елемент з положення перешкоджання так, що накопичувачем механічної енергії звільняється задана кількість механічної енергії. Механізм замикання контактів може бути виконаний так, що кількість механічної енергії, накопичена в накопичувачі механічної енергії, залежить від величини, з якою замикальний привід приводиться в дію. Таким чином, механізм замикання контактів може бути виконаний з можливістю переміщувати перешкоджаючий елемент з положення перешкоджання так, що задана кількість механічної енергії вивільняється переміщенням перешкоджаючого елемента з положення перешкоджання, якщо замикальний привід приводиться в дію заданою величиною. Механізм замикання контактів може включати в себе елемент зміщення, який зміщує перешкоджаючий елемент для перешкоджання контактам. Таким чином, перешкоджаючий елемент буде перешкоджати контактам, поки він не переміститься з положення перешкоджання, наприклад за допомогою іншої частини механізму замикання контактів. Елемент зміщення може бути виконаний з можливістю впливати на перешкоджаючий елемент силою зміщення, яка зменшується, коли накопичувач механічної енергії накопичує механічну енергію. Таким чином, стає простіше переміщувати перешкоджаючий елемент з положення перешкоджання, коли кількість механічної енергії, що накопичується, збільшується. Це може зменшувати навантаження на замикальний привід якщо механізм замикання контактів виконаний з можливістю переміщення перешкоджаючого елемента з положення перешкоджання, якщо механічна енергія, накопичена в накопичувачі механічної енергії, перевищує задану величину. Накопичувач механічної енергії може бути виконаний з можливістю вивільняти накопичену механічну енергію для замикання контактів створенням сили, яка впливає на рухомий один із контактів. Сила, що діє на рухомий контакт, буде залежати від швидкості, з якою накопичена механічна енергія вивільняється накопичувачем механічної енергії, і в зв'язку з цим, може бути збільшена вивільненням механічної енергії з вищою швидкістю, наприклад так, щоб зменшувати час, що затрачується на замикання контактів. Рухомий один із контактів може бути встановлений з можливістю обертання навколо осі. Рухомий контакт може включати в себе видовжений отвір (наприклад, овальної форми) з віссю, що проходить через видовжений отвір. Таким чином, видовжений отвір може забезпечувати поступальне переміщення рухомого контакту, яке може, наприклад, бути використане для забезпечення нагромадження механічної енергії, якщо обертальному переміщенню рухомого контакту перешкоджає перешкоджаючий елемент. Накопичувач механічної енергії може включати в себе першу пружину, виконану з можливістю накопичувати механічну енергію з роботи замикального приводу. Пружина добре придатна як частина накопичувача механічної енергії, оскільки пружина звичайно здатна вивільняти енергію швидко, і тому замикати контакти швидко. Перша пружина може бути пружиною стиснення. Накопичувач механічної енергії може включати в себе другу пружину, виконану з можливістю накопичувати механічну енергію в результаті роботи замикального приводу. Наявність двох пружин виявлена ефективним для виконання накопичувача механічної енергії з можливістю замикання контактів з необхідною швидкістю. Друга пружина може бути пружиною крутіння. Більш того, наявність двох пружин забезпечує профілювання пружин так, що навантаження на замикальний привід може бути виконане з можливістю задоволення вимог замикального приводу (наприклад, з можливістю забезпечення вимог відносно крутного моменту замикального приводу). Накопичувач механічної енергії може бути частиною механізму розмикання контактів, тобто в доповнення до того, що він є частиною механізму замикання контактів. У зв'язку з цим, накопичувач механічної енергії може бути виконаний з можливістю вивільнення ділянки накопиченої механічної енергії для розмикання контактів при спрацюванні механізму розмикання контактів (після чого ділянка накопиченої механічної енергії використовується для замикання контактів). Механізм розмикання контактів, який включає в себе накопичувач механічної енергії, може бути таким, як описано в зв'язку з іншими аспектами винаходу. Винахід включає в себе будь-яку сукупність аспектів і переважних ознак, описаних тут, крім випадків, коли така сукупність очевидно недозволена або явно недопустима. Механізм(и) розмикання/замикання контактів, механізм(и) розмикання і механізм(и) збільшення сили, розкриті тут, не призначені для обмеження яким-небудь одним типом механізму. Такі механізми можуть бути будь-якою доцільною конструкцією, що виконує функції, 11 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 описані тут, які будуть очевидні фахівцевів галузі техніки. Такі механізми можуть звичайно містити один або більше компонентів, що функціонально з'єднуються, наприклад рухомі елементи, важелі, пружини і/або приводи. З опису видно, що ці механізми можуть спільно використовувати ці компоненти. Варіанти виконання наших пропозицій обговорюються нижче з посиланням на супроводжуючі креслення, в яких: Фіг. 1 являє собою схематичну діаграму першого MCB. Фіг. 2 являє собою вигляд зверху в розрізі першого MCB у «зведеному» стані. Фіг. 3 являє собою вигляд в перспективі в розрізі першого MCB у «зведеному» стані. Фіг. 4 являє собою вигляд зверху в розрізі першого MCB в стані «ввімк.», в якому важіль розмикання проілюстрований напівпрозорим. Фіг. 5 являє собою інший вигляд в перспективі в розрізі першого MCB в стані «ввімк.», якщо дивитися зі сторони, протилежної тій, яка показана на Фіг. 4, сторони. Фіг. 6 являє собою вигляд зверху в розрізі першого MCB в першому стані «вимк.». Фіг. 7 являє собою вигляд зверху в розрізі частини механізму передачі сили першого MCB. Фіг. 8 являє собою вигляд в перспективі в розрізі електромеханічного приводу MCB. Фіг. 9 являє собою вигляд зверху в розрізі другого MCB в стані «ввімк.», в якому важіль розмикання проілюстрований напівпрозорим. Фіг. 10 являє собою вигляд зверху в розрізі другого MCB в першому стані «вимк.». Фіг. 11 являє собою вигляд в перспективі підвузла двигуна другого MCB. Фіг. 12 являє собою вигляд в перспективі модуля підвузла двигуна другого MCB, якщо дивитися зі сторони протилежної тій, яка показана на Фіг. 11. Фіг. 13 являє собою вигляд в перспективі двигуна другого MCB. Фіг. 1 показує перший MCB 1, який має першу клему 2 і другу клему 4, які визначають головний ланцюг 6 струму між ними. Пара контактів 8, 10, що розмикаються, розміщені в головному ланцюгу 6 струму. Перший MCB 1 включає в себе механізм 20 розмикання для розмикання контактів 8, 10 при виникненні стану надструму. Механізм 20 розмикання включає в себе блок 22 керування, датчик 23 струму, двигун 25, механізм 30а замикання контактів, механізм 30b розмикання контактів і механізм 60 спрацювання. Блок 22 керування виконаний з можливістю приведення в дію двигуна 25 для замикання контактів 8, 10 за допомогою механізму 30а замикання контактів. Блок керування також виконаний з можливістю приводити в дію двигун 25 для розмикання контактів 8, 10 за допомогою механізму 30b розмикання контактів. У доповнення, блок 22 керування також може приводити в дію двигун для зведення механізму 20 розмикання подачею механічної енергії в механізм 30b розмикання контактів і в механізм 60 спрацювання, які описані детальніше нижче. Блок 22 керування виконаний з можливістю визначення, чи виникає стан надструму, основуючись на вихідному сигналі датчика 23 струму, який виявляє струм в головному ланцюгу 6 струму. У цьому особливому варіанті виконання датчик 23 струму являє собою перетворювач струму, який подає струм в блок 22 керування, причому поданий струм представляє струм в головному ланцюгу 6 струму. Датчики струму добре відомі і не обговорюються додатково детально. Блок 22 керування включає в себе конденсатор (не показаний) і виконаний з можливістю створювати струм розмикання (від конденсатора), якщо він визначає, що існує стан короткого замикання, основуючись на вихідному сигналі датчика 23 струму. Механізм 60 спрацювання приводиться в дію струмом розмикання для приведення механізму 30b розмикання контактів до розмикання контактів 8, 10. Блок 22 керування додатково виконаний з можливістю приводити в дію двигун 25 для приведення механізму 30b розмикання контактів до розмикання контактів 8, 10, якщо він визначає, що існує стан перевантаження, основуючись на вихідному сигналі датчика 23 струму. Таким чином, механізм 30b розмикання контактів спрацьовує незалежно від механізму 60 спрацювання при виникненні стану перевантаження. Це допомагає уникати зносу механізму 60 спрацювання при відсутності стану перевантаження, причому час, що затрачується на розмикання контактів, менш важливий, ніж тривалість станів короткого замикання. Як показано на Фіг. 1, механізм 60 спрацювання включає в себе електромеханічний привід 61 і механізм 70 передачі сили. Електромеханічний привід 61 приводиться в дію струмом розмикання з блока 22 керування, що приводиться в дію, щоб створювати першу силу спрацювання. Механізм 70 передачі сили виконаний з можливістю створювати другу силу спрацювання, більшу першої сили спрацювання при створенні першої сили спрацювання. Таким чином, механізм 70 передачі сили перетворює першу силу спрацювання у другу силу 12 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 спрацювання. Механізм 70 передачі сили з'єднує електромеханічний привід 61 з механізмом 30b розмикання контактів так, що друга сила спрацювання приводить механізм 30b розмикання контактів до розмикання контактів 8, 10. Друга сила спрацювання також допомагає механічно сприяти розмиканню контактів 8, 10 механізмом 30b розмикання контактів, що допомагає уникати «прихоплювального» зварювання контактів 8, 10 під час великих надструмів короткого замикання, як описано детальніше нижче. Фіг. 2-8 показують детальніше перший MCB 1. Перший MCB 1 далі буде описаний у «зведеному» стані, як показано на Фіг. 2 і 3. «за годинниковою стрілкою» і «проти годинникової стрілки» тут визначено, як показано на Фіг. 2, якщо не відмічено інакше. Перший MCB 1 включає в себе пластиковий корпус 12. Корпус 12 забезпечений двома половинами (одна половина корпусу 12 не показана на кресленнях), які склеплені разом через заклепувальні отвори 13. Зовнішня поверхня корпусу 12 визначає монтажне поглиблення 14 для встановлення MCB на монтажну рейку, що звичайно знаходиться в побутовому щиті із розмикачем і т.п. Перша клема 2 і друга клема 4 першого MCB 1 забезпечені у вигляді гвинтових клем на протилежних кінцях корпусу 12. У цьому варіанті виконання перша клема 2 являє собою клему навантаження для з'єднання з навантаженням, що живиться джерелом живлення, а друга клема 4 являє собою лінійну клему для з'єднання з джерелом живлення. Однак, в інших варіантах виконання перша клема 2 являє собою лінійну клему, а друга клема 4 являє собою клему навантаження. У будь-якому випадку, головний ланцюг струму являє собою частину ланцюга струму між джерелом живлення і навантаженням. Нерухомий контакт 8 забезпечений у вигляді смуги провідника, встановленого всередині корпусу 12. Рухомий контакт 10 забезпечений у вигляді плеча, встановленого з можливістю обертання в корпусі за допомогою осі 10а рухомого контакту, що проходить через видовжену щілину 11 (дивись Фіг. 5) в рухомому контакті 10. Видовжена щілина 11 забезпечує поступальне переміщення рухомого контакту 10 відносно осі 10а. У цьому варіанті виконання рухомий контакт 10 включає в себе нероздільний контактний стовпчик, наприклад із гальванізованого срібла, для контакту з нерухомим контактом 8. В інших варіантах виконання, рухомий контакт 10 має стовпчик провідника, встановлений на ньому. Нерухомий контакт 8 з'єднаний з першою клемою 2 викривленою струмопровідною доріжкою 6а. Рухомий контакт 10 з'єднаний з клемою навантаження викривленою струмопровідною доріжкою 6b. Таким чином, викривлені струмопровідні доріжки 6а, 6b утворюють головний ланцюг 6 струму MCB, в якому розміщені контакти 8, 10. Контакти 8, 10 можуть бути замкнені обертанням рухомого контакту 10 за годинниковою стрілкою у напрямку до нерухомого контакту 8 і розімкнеш обертанням рухомого контакту 10 проти годинникової стрілки від нерухомого контакту 8. Коли контакти 8, 10 замкнені, струм може протікати по головному ланцюгу 6 струму. Коли контакти 8, 10 розімкнені, струм не може протікати по головному ланцюгу 6 струму. Перший MCB 1 включає в себе направляючі 16 дуги, і пластини 17 гасіння дуги. Направляючі 16 дуги з'єднані з першою і другою клемами 2, 4 і продовжуються в камеру гасіння дуги корпусу 12, в якій розміщені пластини 17 гасіння дуги. У разі виникнення стану короткого замикання дуже великі надструми короткого замикання можуть протікати по головному ланцюгу 6 струму з можливістю створення дуги між контактами 8, 10, коли контакти 8, 10 розмикаються механізмом 30b розмикання контактів. Направляючі 16 дуги передають таку дугу на пластини 17 гасіння дуги, діючи так, щоб гасити дугу. Направляючі 16 дуги, пластини 17 гасіння дуги та інші компоненти MCB 1, розміщені нижче лінії A-A на Фіг. 2, добре відомі і не будуть описуватися додатково детально. Двигун 25 встановлений в корпусі 12 за допомогою монтажної пластини 26 двигуна (дивись Фіг. 3). Двигун 25 має вал 28 (дивись Фіг. 3), на якому встановлений перший кулачок 32. Двигун 25 здатний працювати в «прямому» режимі, в якому вал 28 двигуна 25 обертається в напрямку за годинниковою стрілкою, а також в «зворотному» режимі, в якому вал двигуна 25 обертається в напрямку проти годинникової стрілки, якщо дивитися з кінця двигуна 25, на якому встановлений перший кулачок 32. У деяких варіантах виконання двигун 25 являє собою 6-ти вольтовий редукторний двигун постійного струму, що має передавальне відношення 324:1 і вихідний крутний момент 50 мНм під час переривчастої роботи. Такі двигуни доступні, наприклад, в Faulhaber Group. Інші двигуни можуть бути в однаковій мірі застосовні. Механізм 30а замикання контактів включає в себе перший кулачок 32, другий кулачок 34, пружину 35 другого кулачка, ланку 36, защіпку 38, важіль 40 розмикання, пружину 42 важеля 13 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 розмикання, пружини 44, 46 рухомого контакту, повзун 50, важіль 52 повзуна, перешкоджаючий елемент 54 і пружину 56 перешкоджаючого елемента. Механізм 30b розмикання контактів спільно використовує багато які компоненти з механізмом 30а замикання контактів і включає в себе другий кулачок 34, пружину 35 другого кулачка, ланку 36, защіпку 38, важіль 40 розмикання, пружину 42 важеля розмикання і пружини 44, 46 рухомого контакту. Перший кулачок 32 встановлений на валу 28 двигуна 25 так, що обертання вала 28 спонукає перший кулачок 32 обертатися в такому ж напрямку, що і вал 28. Таким чином, робота двигуна 25 в прямому режимі спонукає перший кулачок 32 обертатися в напрямку за годинниковою стрілкою, і робота двигуна 25 в «зворотному» режимі спонукає перший кулачок 32 обертатися в напрямку проти годинникової стрілки, якщо дивитися з кінця двигуна 25, на якому встановлений перший кулачок 32. Другий кулачок 34 встановлений з можливістю обертання в корпусі 12 за допомогою осі 34а для обертання між «втягнутим» положенням, показним на Фіг. 2 і «висуненим» положенням, показаному на Фіг. 4. Другий кулачок 34 розміщений так, що робота двигуна 25 в прямому режимі спонукає перший кулачок 32 зачіплювати другий кулачок 34 так, щоб спонукати другий кулачок 34 обертатися в напрямку проти годинникової стрілки до його висуненого положення. Пружина 35 другого кулачка (дивись Фіг. 5), яка являє собою пружину крутіння, змішує другий кулачок 34 у напрямку до його втягнутого положення. Ланка 36 з'єднує другий кулачок 34 із защіпкою 38 так, що обертання другого кулачка 34 у напрямку до його висуненого положення штовхає защіпку 38 від двигуна 25. Защіпка 38 встановлена з можливістю обертання на рухомому контакті 10 за допомогою осі 38а на рухомому контакті 10 так, що защіпка 38 може обертатися відносно рухомого контакту 10. Важіль 40 розмикання встановлений з можливістю обертатися на осі 10а рухомого контакту, тобто осі, на якій рухомий контакт 10 встановлений з можливістю обертання. Пружина 42 важеля розмикання, яка являє собою пружину крутіння, зміщує важіль 40 розмикання в напрямку за годинниковою стрілкою так, що у «зведеному» стані, показаному на Фіг. 2 і 3, важіль 40 розмикання зачіпляє защіпку 38 так, щоб втримувати защіпку 38 в поглибленні 40а у важелі 40 розмикання. Це запобігає вільному обертанню защіпки 38 навколо осі 38а защіпки. Оскільки защіпка 38 утримується в поглибленні 40а у важелі 40 розмикання, обертання другого кулачка 34 у напрямку до його висуненого положення штовхає защіпку 38 (за рахунок ланки 36) до рухомого контакту 10, що спонукає рухомий контакт 10 обертатися в напрямку за годинниковою стрілкою, тобто у напрямку до нерухомого контакту 8. Пружини 44, 46 рухомого контакту включають в себе пружину 44 стиснення рухомого контакту і пружину 46 крутіння рухомого контакту, встановлені в корпусі 12. Коли перший MCB 1 знаходиться у «зведеному» стані, показаному на Фіг. 2 і 3, обидві пружини 44, 46 рухомого контакту забезпечують силу, яка зміщує рухомий контакт 10 від нерухомого контакту 8, незважаючи на те, що сила, забезпечена пружиною стиснення рухомого контакту, головним чином діє через вісь 10а рухомого контакту. Індикатор 48 позитивного контакту встановлений з можливістю обертання в корпусі 12 за допомогою осі, і є видимим зовні першого MCB 1 через вікно в корпусі 12 (не показане). Індикатор 48 включає в себе U-образну ділянку, яка зачіплюється з можливістю ковзання з віссю 38а защіпки на рухомому контакті 10 (дивись Фіг. 5). Це зачеплення є таким, що обертання рухомого контакту 10 спричиняє обертання індикатора 48 для відображення першого кольору (наприклад зеленого) через вікно, коли контакти 8, 10 розімкнені, і для відображення другого кольору (наприклад червоного) через вікно, коли контакти 8, 10 замкнені. Таким чином, індикатор 48 дозволяє користувачеві визначати розімкнені чи замкнені контакти 8, 10 без необхідності відкривати корпус 12. У доповнення до здатності зачіплюватися з другим кулачком 34, перший кулачок 32 з'єднаний (розміщенням штифта, відформованого виступу) з повзуном 50, який встановлений з можливістю ковзання в каналі, утвореному в монтажній пластині 26 двигуна. Повзун 50 здатний переміщатися між «втягнутим» положенням, показаним на Фіг. 3, і «висуненим» положенням, показаним на Фіг. 5. З'єднання між першим кулачком 32 і повзуном 50 є таким, що робота двигуна 25 в прямому режимі спонукає повзун 50 переміщатися у напрямку до його висуненого положення, і робота двигуна 25 в зворотному режимі спонукає повзун 50 переміщатися у напрямку до його втягнутого положення. Повзун 50 з'єднаний з важелем 52 повзуна (дивись Фіг. 5), який встановлений з можливістю обертання в корпусі 12 за допомогою осі. Переміщення повзуна 50 у напрямку до його висуненого положення спонукає важіль 52 повзуна обертатися в напрямку проти годинникової стрілки, як видно на Фіг. 5. 14 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 Перешкоджаючий елемент 54 встановлений з можливістю ковзання в каналі, утвореному в корпусі 12. Перешкоджаючий елемент 54 здатний переміщатися в положення перешкоджання, в якому він загороджує рухомий контакт від нерухомого контакту 8. У «зведеному» стані, показаному на Фіг. 2 і 3, перешкоджаючий елемент 54 знаходиться в своєму положенні перешкоджання, в якому він опущений у напрямку до нерухомого контакту 8 так, щоб перешкоджати рухомому контакту 10. Фіг. 4 показує перешкоджаючий елемент 54, що підіймається з його положення перешкоджання. Пружина 56 перешкоджаючого елемента встановлена на виступі в корпусі 12 (не показано) і зачіплюється з виступом на важелі 52 повзуна (дивись Фіг. 5). При цьому, пружина 56 перешкоджаючого елемента зміщує перешкоджаючий елемент 54 у напрямку до положення перешкоджання. Однак, обертання другого кулачка 34 у напрямку до його висуненого положення (тобто в напрямку проти годинникової стрілки) спонукає другий важіль 34 зачіплювати перешкоджаючий елемент 54 так, щоб долати пружину 56 перешкоджаючого елемента, таким чином підіймаючи перешкоджаючий елемент 54 з положення перешкоджання, наприклад як показано на Фіг. 5. Пружина 56 перешкоджаючого елемента виконана з можливістю впливати на перешкоджаючий елемент 54 силою зміщення, яка зменшується, коли двигун 25 працює в своєму прямому режимі. Таким чином, сила зміщення, що діє на перешкоджаючий елемент 54, меншає до зачеплення другого кулачка 34 з перешкоджаючим елементом 54, щоб підіймати його з положення перешкоджання. Таким чином, навантаження на двигун 25 за рахунок пружини 56 перешкоджаючого елемента меншає. Електромеханічний привід 61 є приводом соленоїда, що магнітно защіплюється. Як пояснювалося вище, електромеханічний привід 61 приводиться в дію струмом розмикання, створеним блоком 22 керування. Спрацювання електромеханічного приводу 61 спонукає якір 62 (дивись Фіг. 3) виштовхуватися назовні з отвору електромеханічного приводу 61. Електромеханічний привід 61 описаний детальніше нижче з посиланням на Фіг. 8. Механізм 70 передачі сили включає в себе важіль 72 повернення приводу, пружину 74 розмикання, важіль 76 повернення пружини, важіль 78 вивільнення пружини і штифт 80 розмикання. Важіль 72 повернення приводу встановлений з можливістю обертання в корпусі 12 за допомогою осі і має ділянку, яка перекриває якір в електромеханічному приводі 61 так, що якір 62 електромеханічного приводу 61 натискає важіль 72 повернення приводу, коли електромеханічний привід 61 приводиться в дію струмом розмикання. Пружина 74 розмикання (дивись Фіг. 5) являє собою велику пружину стиснення, що втримується в порожнині (не показано) в корпусі 12 і діє як накопичувач механічної енергії для механізму передачі сили. Коли перший MCB 1 знаходиться у «зведеному» стані, показаному на Фіг. 2 і 3, пружина 74 розмикання повністю стисла і тому зведена, тобто нагромаджуючи механічну енергію. Важіль 76 повернення пружини розміщений спереду пружини 74 розмикання і встановлений з можливістю обертання в корпусі 12 за допомогою осі так, що пружина 74 розмикання обертає важіль 76 повернення пружини в напрямку проти годинникової стрілки, як видно на Фіг. 7, коли пружина 74 розмикання розправляється, тобто коли вона вивільняє свою накопичену механічну енергію. Важіль 78 вивільнення пружини встановлений з можливістю обертання в корпусі 12 за допомогою осі. У «зведеному» стані, показаному на Фіг. 2 і 3, важіль 78 вивільнення пружини знаходиться в блокуючому положенні, в якому виступ 78а (дивись Фіг. 7) важеля вивільнення пружини розміщений спереду важеля 76 повернення пружини так, щоб запобігати обертанню важеля 76 повернення пружини. Таким чином, коли перший MCB 1 знаходиться у «зведеному» стані, важіль 78 вивільнення пружини запобігає вивільненню накопиченої механічної енергії пружини 74 розмикання. Пружина 79 важеля вивільнення, яка являє собою пружину крутіння (дивись Фіг. 7), зміщує важіль 78 вивільнення пружини в його блокуюче положення. Лімб 78b важеля 78 вивільнення пружини продовжується поперечно важелю 72 повернення пружини (дивись Фіг. 3) так, що обертальне переміщення важеля 72 повернення приводу, виникаюче за допомогою роботи електромеханічного приводу 61, спонукає важіль 72 повернення приводу обертати важіль 78 вивільнення пружини в напрямку за годинниковою стрілкою, як показано на Фіг. 7. Це переміщує важіль 78 вивільнення пружини з блокуючого положення так, що виступ 78а переміщується в сторону від важеля 76 повернення пружини (дивись Фіг. 7), щоб дозволити пружині 74 розмикання вивільнити свою накопичену механічну енергію для приведення механізму 30b розмикання контактів до розмикання контактів 8, 10, як описано детальніше нижче. У зв'язку з цим, важіль 78 вивільнення пружини діє як защіпка для 15 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 пружини 74 розмикання, причому защіпка звільняється переміщенням важеля 78 вивільнення пружини з її блокуючого положення. Ланка 77 з'єднує важіль 76 повернення пружини з важелем 52 повзуна (дивись Фіг. 5) через видовжену щілину у важелі 76 повернення пружини. Видовжена щілина у важелі 76 повернення пружини забезпечує переміщення важеля 76 повернення пружини так, що важіль 52 повзуна і повзун 50 не переміщаються під час розправляння пружини 74 розмикання. Штифт 80 розмикання встановлений з можливістю ковзання в межах вузла опорної ділянки нерухомого контакту/струмопровідної доріжки 6а корпусу 12 і розміщений між важелем 76 повернення пружини і важелем 40 розмикання. Далі буде описана робота двигуна 25 для замикання контактів 8, 10 із «зведеного» стану, показаного на Фіг. 2 і 3. Для того, щоб замкнути контакти 8, 10 із «зведеного» стану, блок 22 керування приводить в дію двигун 25 в його прямому режимі. Це спонукає перший кулачок 32 обертатися з можливістю зачеплення другого кулачка 34 так, щоб виконати обертання другого кулачка 34 у напрямку до його висуненого положення. Коли другий кулачок 34 обертається, він штовхає рухомий контакт 10 за рахунок ланки 36 і защіпки 38 для обертання рухомого контакту 10 в напрямку за годинниковою стрілкою у напрямку до нерухомого контакту 8. Під час цієї операції ланка 36 і защіпка 38 переміщаються у напрямку до пружин 44, 46 рухомого контакту. Однак, запобігається відчеплення защіпки 38 від важеля 40 розмикання пружиною 42 важеля розмикання, яка зміщує важіль 40 розмикання з можливістю обертання в напрямку за годинниковою стрілкою так, щоб йти за переміщенням защіпки 38 у напрямку до пружин 44, 46 рухомого контакту. Незважаючи на те, що рухомий контакт 10 спочатку обертається у напрямку до нерухомого контакту 8, замикання контактів 8, 10 запобігається перешкоджаючим елементом 54, який зміщується в своє положення перешкоджання пружиною 56 перешкоджаючого елемента. Таким чином, перешкоджаючий елемент 54 запобігає безперервному обертальному переміщенню рухомого контакту 10, але коли другий кулачок 34 продовжує штовхати рухомий контакт 10 за рахунок ланки 36 і защіпки 38, видовжена щілина 11, через яку продовжується вісь 10а, забезпечує поступальне переміщення рухомого контакту 10 у напрямку до пружин 44, 46 рухомого контакту. Пружини 44, 46 рухомого контакту виконані з можливістю накопичувати механічну енергію від двигуна 25 за рахунок обертального і поступального переміщення рухомого контакту 10 у напрямку до цих пружин, коли защіпка 38 штовхає рухомий контакт 10. Як пояснюється вище, коли перший MCB 1 знаходиться у «зведеному» стані, показаному на Фіг. 2 і 3, пружини 44, 46 рухомого контакту зміщують рухомий контакт від нерухомого контакту 8. Зміщення пружин 44, 46 рухомого контакту штовхає защіпку у напрямку до другого кулачка 34 так, що сила від пружин 44, 46 рухомого контакту передається у напрямку до другого кулачка 34 вздовж осі ланки 36. Таким чином, коли другий кулачок 34 знаходиться в або поблизу свого втягнутого положення, сила, що діє вздовж осі ланки 36, штовхає другий кулачок 34 зворотно у напрямку до його втягнутого положення. Однак, коли другий кулачок 34 продовжує обертатися у напрямку до його висуненого положення, сила від пружин 44, 46 рухомого контакту, яка діє вздовж осі ланки 36, стає «урівноваженою» відносно осі 34а другого кулачка 34 і, в зв'язку з цим, зміщує другий кулачок 34 у напрямку до його висуненого положення, долаючи зміщення другого кулачка 34 пружиною 35 другого кулачка. Це проілюстровано на Фіг. 4, на якій лінія дії «урівноваженої» сили, що діє вздовж осі ланки 36, позначена посилальною позицією 37. Як тільки сила, що діє вздовж осі лайки 36, стає «урівноваженою» відносно осі 34а другого кулачка, другий кулачок 34, ланка 36 і защіпка 38 утворюють опорну конструкцію, яка підтримує вісь 38а защіпки так, що вісь 38а защіпки стає віссю для рухомого контакту 10 (видовжена щілина 11 забезпечує обертальне переміщення рухомого контакту 10 навколо осі 38а защіпки). Як тільки вісь для рухомого контакту 10 змінюється у вісь 38а защіпки, сили, забезпечені пружинами 44, 46 рухомого контакту, діють з можливістю зміщення рухомого контакту 10 у напрямку до, а не від, нерухомому контакту 8. Коли другий кулачок 34 підходить до його висуненого положення, він зачіпляє перешкоджаючий елемент 54 так, щоб долати пружину 92 перешкоджання і виводити перешкоджаючий елемент 54 з положення перешкоджання, наприклад як показано на Фіг. 4. Як тільки перешкоджаючий елемент 54 виводиться з положення перешкоджання, рухомий контакт 10 стає вільним для переміщення в контакт з нерухомим контактом 8, і таким чином, ділянка накопиченої механічної енергії, накопиченої в пружинах 44, 46 рухомого контакту, вивільняється з можливістю приведення в рух рухомого контакту 10 у напрямку до нерухомого 16 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 контакту 8 зі швидкістю, яка по суті не залежить від швидкості роботи двигуна 25. У зв'язку з цим, пружини 44, 46 рухомого контакту діють як накопичувач механічної енергії механізму 30b замикання контактів. Частина накопиченої механічної енергії залишається в пружинах 44, 46 рухомого контакту після замикання контактів 8, 10 і забезпечує силу, яка спонукає контакти 8, 10 разом забезпечувати контактний тиск. Таким чином, перший MCB 1 входить в стан «ввімк.», як показано на Фіг. 4 і 5. Далі буде описана робота двигуна 25 для приведення механізму 30b розмикання контактів (незалежно від механізму 60 спрацювання) до розмикання контактів 8, 10 зі стану «ввімк.», показаного на Фіг. 4 і 5. Коли перший MCB 1 знаходиться в стані «ввімк.», виступ 40b на важелі 40 розмикання розміщений в межах поглибленої ділянки повзуна 50. Щоб розімкнути контакти 8, 10 за допомогою роботи двигуна 25, блок 22 керування запускає двигун в його зворотному режимі для переміщення повзуна 50 на невелику відстань у напрямку до його втягнутого положення. Це переміщення повзуна 50 спонукає повзун 50 зачіплюватися з виступом 40b так, щоб обертати важіль 40 розмикання в напрямку проти годинникової стрілки. Обертання важеля 40 розмикання в напрямку проти годинникової стрілки спонукає защіпку 38 відчіплюватися від важеля 40 розмикання і, в зв'язку з цим, вивільняє защіпку 38. Як тільки защіпка 38 звільняється, опорна конструкція (утворена другим кулачком 34, ланкою 36 і 38), яка підтримувала вісь 38а защіпки, зникає, і вісь 10а рухомого контакту знову стає віссю для рухомого контакту 10. Як тільки вісь 10а рухомого контакту стає віссю для рухомого контакту 10, пружини 44, 46 рухомого контакту знову зміщують рухомий контакт 10 від нерухомих контактів. Як пояснюється вище, частина накопиченої механічної енергії залишається в пружинах 44, 46 рухомого контакту після замикання контактів 8, 10. Як тільки вісь 10а рухомого контакту стає віссю для рухомого контакту 10, ця накопичена механічна енергія, що залишилася, звільняється пружинами 44, 46 рухомого контакту так, щоб розмикати контакти 8, 10 обертанням рухомого контакту 10 від нерухомого контакту 8. У зв'язку з цим, пружини 44, 46 рухомого контакту діють як накопичувач механічної енергії для механізму 30b розмикання контактів, який вивільняє механічну енергію для розмикання контактів 8, 10. Механічна енергія, що використовується пружинами 44, 46 рухомого контакту для розмикання контактів 8, 10, була підведена двигуном 25 під час виконання замикання контактів 8,10, описаного вище. Коли контакти 8, 10 розмикають, будь-яка дуга, що виходить між контактами 8, 10 за допомогою направляючої дуги передається на пластини 17 гасіння, в яких вона гаситься. Коли рухомий контакт 10 обертається в напрямку проти годинникової стрілки у напрямку до його положення повного замикання, виступ 10b (дивись Фіг. 4) на рухомому контакті зачіпляє виступ 72а (дивись Фіг. 3) на важелі 72 повернення приводу для обертання важеля 72 повернення приводу в напрямку за годинниковою стрілкою. Це штовхає якір 62 назад в отвір електромеханічного приводу 61 так, щоб повертати в початковий стан електромеханічний привід 61. Таким чином, перший MCB 1 входить в перший стан «вимк.», що показаний на Фіг. 6. Як тільки перший MCB 1 входить в перший стан «вимк.», показаний на Фіг. 6, безперервна робота двигуна 25 в зворотному режимі переміщує повзун 50 в його втягнуте положення і обертає перший кулачок 32 від другого кулачка 34. Коли перший кулачок 32 обертається, пружина 35 другого кулачка зміщує другий кулачок 34, щоб слідувати за першим кулачком 32 так, щоб переміщувати другий кулачок 34 у напрямку до його втягнутого положення. Переміщення другого кулачка 34 у напрямку до його втягнутого положення переміщує защіпку 38 (за рахунок ланки 36) так, що защіпка перезачіплюється з важелем 40 розмикання, що втримується в поглибленні 40а важеля розмикання. Таким чином, перший MCB 1 повертається в перший «зведений» стан, показаний на Фіг. 2 і 3. Як тільки перший MCB 1 повертається у «зведений» стан, контакти 8, 10 можуть бути перезамкнуті роботою двигуна 25 в його прямому режимі, щоб повернути перший MCB 1 в стан «ввімк.», як описано вище. Далі буде описане виконання механізмом 60 спрацювання приведення механізму 30b розмикання контактів (незалежно від двигуна 25) до розмикання контактів 8, 10 зі стану «ввімк.», показаного на Фіг. 4 і 5. Щоб розмикати контакти 8, 10 за допомогою механізму 60 спрацювання, блок керування подає струм розмикання від його конденсатора в електромеханічний привід 61. Це спонукає електромеханічний привід 61 штовхати якір 62 з отвору в електромеханічному приводі 61 і в 17 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 60 контакт з важелем 72 повернення приводу, спонукаючи важіль 72 повернення приводу обертатися в напрямку проти годинникової стрілки. Коли важіль 72 повернення приводу обертається, він переміщується в контакт з лімбом 78b важеля 78 вивільнення пружини і обертає важіль 78 вивільнення пружини за годинниковою стрілкою для переміщення виступу 78а важеля 78 вивільнення пружини з його блокуючого положення так, що пружина 74 розмикання швидко розправляється, вивільняючи її накопичену механічну енергію для створення великої сили, яка обертає важіль 76 повернення пружини з високою швидкістю в напрямку проти годинникової стрілки, як видно на Фіг. 7. Коли важіль 76 повернення пружини обертається з високою швидкістю, він переміщує штифт 80 розмикання, який в свою чергу ударяє по важелю 40 розмикання зі значною силою. Обертання важеля 40 розмикання штифтом 80 розмикання приводить механізм 30b розмикання контактів до розмикання контактів 8, 10, як описано вище. У доповнення до приведення механізму 30b розмикання контактів до розмикання контактів 8, 10, удар по важелю 40 розмикання штифтом 80 розмикання спонукає важіль 40 розмикання обертатися в напрямку проти годинникової стрілки з високою швидкістю так, що важіль 40 розмикання зачіплюється з рухомим контактом 10 так, щоб швидко обертати рухомий контакт 10 від нерухомого контакту 8. В цьому процесі рушійна сила передається від штифта 80 розмикання рухомому контакту 10 так, щоб механічно сприяти розмиканню контактів 8, 10. Механічне сприяння розмиканню контактів 8, 10 механізмом 70 передачі сили є переважним, оскільки він допомагає зменшити час, що затрачується на розмикання контактів 8, 10 під впливом станів надструму, а також допомагає уникнути зварювання контактів 8, 10 (тобто «прихоплювального» зварювання), якщо через головний ланцюг 6 струму тече дуже великий струм короткого замикання, наприклад 1000А-2000А. Як тільки механізм 60 спрацювання приводить механізм 30b розмикання контактів до розмикання контактів 8, 10, перший MCB 1 входить у другий стан «вимк.», в якому контакти 8, 10 розмикаються, і механізм 60 спрацювання не зводиться (тобто оскільки пружина 74 розмикання вивільняє свою накопичену механічну енергію). Другий стан «вимк.» не проілюстрований. Далі буде описана робота механізму 60 розмикання для зведення механізму 60 спрацювання з другого стану «вимк.». Для того, щоб звести механізм 60 спрацювання, блок 22 керування запускає двигун 25 в його зворотному режимі, що спонукає повзун 50 переміщатися у напрямку до його втягнутого положення, що спонукає важіль 52 повзуна обертатися в напрямку за годинниковою стрілкою, як видно на Фіг. 5. Коли важіль 52 повзуна обертається в напрямку за годинниковою стрілкою, як показано на Фіг. 5, ланка 77, з'єднана з важелем 52 повзуна, зачіплюється з важелем 76 повернення пружини так, щоб тягнути важіль повернення пружини для обертання в напрямку проти годинникової стрілки, як показано на Фіг. 5. Ця дія стискає пружину 74 розмикання, а також дозволяє пружині 79 важеля вивільнення переміщувати важіль 78 вивільнення пружини назад в його блокуюче положення так, що виступ 78а важеля 78 вивільнення пружини запобігає вивільненню накопиченої механічної енергії пружини 74 розмикання. Таким чином, робота двигуна 25 в зворотному напрямку зводить механізм спрацювання подачею механічної енергії пружині 74 розмикання. У зв'язку з цим, перший MCB 1 повертається у «зведений» стан, показаний на Фіг. 2 і 3. Щоб перезамикати контакти 8, 10 і повертати перший MCB 1 в стан «ввімк.», блок 22 керування запускає двигун 25 в його прямому режимі, як описано вище. Фіг. 8 показує електромеханічний привід 61 першого MCB 1 детальніше. Як показано на Фіг. 8, електромеханічний привід 61 являє собою магнітно защіплюваний привід соленоїда, що має каркас 63, в якому вміщені якір 62, котушка 64, пружина 66 вивільнення, магніт 68 з рідкісноземельних металів і магнітна пластина 69. Якір 62 виступає дещо з отвору в каркасі 63 електромеханічного приводу 61. Каркас 63, якір 62 і магнітна пластина 69 виготовлені з м'якої сталі або м'якого заліза. Пружина 66 вивільнення створює пружну силу, яка діє на якір 62 з можливістю зміщення якоря 62 в положення, в якому вона виштовхується з отвору в каркасі 63 електромеханічного приводу 61. Магніт 68 з рідкісноземельних металів створює магнітне поле, яке перетворюється магнітною пластиною 69 так, щоб створювати стримуючу силу, яка діє на якір 62. Стримуюча сила врівноважує пружну силу при відсутності струму в котушці 64. Таким чином, коли струм не подається в котушку 64, якір 62 утримується в електромеханічному приводі 61. Як пояснено вище, якщо блок 22 керування визначає, що виникає стан короткого замикання, тоді він створює струм розмикання, який подається в котушку 64 електромеханічного приводу 18 UA 109114 C2 5 10 15 20 25 30 35 40 45 50 55 61. У більшості соленоїдів струм в котушці соленоїда створює магнітне поле, яке створює силу, що діє на якір, щоб втягнути якір в соленоїд. Однак, в електромеханічному приводі 61 струм розмикання в котушці 64 з блока 22 керування має таку полярність, що струм в котушці 64 створює магнітне поле, яке діє на якір 62 із силою, яка порушує рівновагу пружини і стримуючих сил, ідо діють на якір 62 так, щоб спонукати пружну силу долати стримуючу силу. Як тільки пружна сила подолає стримуючу силу, пружина 66 вивільнення діє на якір 62 із силою, яка штовхає якір 62 із вказаного отвору, таким чином приводячи в дію електромеханічний привід 61. У зв'язку з цим, магніт 68 з рідкісноземельних металів і магнітна пластина 69 діють як магнітна защіпка для електромеханічного приводу 61, причому ця защіпка звільняється силою, створеною струмом розмикання в котушці 64. Пружина штовхає якір 62 електромеханічного приводу 61 з більшою силою, ніж сила, що діє на якір 62, створена струмом розмикання, що тече в котушці 64. У зв'язку з цим, пружина 66 вивільнення, магніт 68 з рідкісноземельних металів і магнітна пластина 69 можуть бути розглянуті як механізм передачі сили, який перетворює силу, створену струмом в котушці 64, у більшу силу. Це збільшення сили допомагає електромеханічному приводу 61 зменшувати час, що затрачується механізмом 60 спрацювання на приведення механізму 30b розмикання контактів до розмикання контактів. Фіг. 8 показує магнітний контур 68а магніту 68 з рідкісноземельних металів і магнітний контур 64а котушки 64, коли струм тече в котушці 64. Як показано на Фіг. 8, ці магнітні контури зустрічаються в магнітній пластині 69. Намотування котушки 64 може змінюватися в перерізі і числом для зміни числа ампер-витків і тривалості імпульсу внаслідок розрядки конденсатора блока 22 керування. Розрядка конденсатора переважно максимізується так, щоб збільшувати амплітуду сили, що діє, і в зв'язку з цим мінімізувати час, що затрачується на спрацювання електромеханічного приводу 61 під впливом струму розмикання. Як пояснювалося раніше, коли механізм 30b розмикання контактів приводиться до розмикання контактів 8, 10, виступу 10b (дивись Фіг. 4) на рухомому контакті 10 зачіпляє виступ 72а на важелі 72 повернення приводу, щоб обертати важіль 72 повернення приводу для штовхання якоря 62 назад в електромеханічний привід 61, таким чином повертаючи в початковий стан електромеханічний привід 61 подачею механічної енергії для повторного стиснення пружини 66 вивільнення. Фіг. 9-13 показують другий MCB 101. Ознаки другого MCB 101, які є такими ж, що і в першому MCB 1, позначені тими ж посилальними позиціями і не будуть обговорюватися додатково детально. Робота другого MCB 101 між «зведеним» станом, станом «ввімк.» і першим і другим станами «вимк.» обговорюється з посиланням на перший MCB 1. Другий MCB 101 має двигун 125 (дивись Фіг. 13), який являє собою частину підвузла 126 двигуна (дивись Фіг. 11 і 12). Підвузол 126 двигуна включає в себе корпус 127, який вміщує двигун 125, перший кулачок 32, повзун 150, важіль 72 повзуна, електромеханічний привід 61, важіль 72 повернення приводу, пружину 74 розмикання, важіль 76 повернення пружини, важіль 78 вивільнення пружини і пружину 79 важеля вивільнення. Корпус 127 підвузла 126 двигуна включає в себе пальці 127а, що защіплюються, які дозволяють двигуну 125 защіплюватися в положення всередині підвузла 126 двигуна за рахунок відповідних виступів 125а на двигуні 125 (дивись Фіг. 13). Як тільки підвузол 126 двигуна встановлюється в корпусі 12 другого MCB 101, зачіплювані пальці 127а підтримуються корпусом 12 так, що вони не можуть згинатися для вивільнення двигуна 125. Корпус 127 підвузла 126 двигуна визначає отвори 127b (дивись Фіг. 12), які дозволяють підвузлам 126 двигуна встановлюватися в корпусі 12 за допомогою відповідних буртиків на корпусі 12 (не показані). У зв'язку з цим, підвузол 126 двигуна допомагає спрощувати процес збирання другого MCB 101. Повзун 150 другого MCB 101 функціонує таким же чином, що і повзун 50 першого MCB 1. Однак, форма повзуна 150 більш пластиноподібна, яка поліпшує міцність повзуна 150. Повзун 150 другого MCB 101 встановлений з можливістю ковзання в каналі, утвореному між корпусом 12 другого MCB 101 і двигуном 125 і першим кулачком 32, а не в монтажній пластині 26 двигуна, як в першому MCB 1. Важіль 52 повзуна з'єднується з повзуном 150 за допомогою отвору в повзунові 150. Опорна ділянка для нерухомого контакту 8, показаного на Фіг. 4, 6, 7, 9 і 10 дещо нахилена у напрямку до рухомого контакту 10, порівняно з опорною ділянкою для нерухомого контакту 8, показаного на Фіг. 2, 3 і 5. Ця додаткова ознака допомагає збільшувати відстань між верхньою частиною опорної ділянки нерухомого контакту і рухомим контактом 10. 19 UA 109114 C2 5 10 Фахівець в галузі техніки після прочитання вищенаведеного опису буде здатний виконувати різні зміни, перетворення і видалення еквівалентів без відхилення від розкритих задумів. У зв'язку з цим мається на увазі, що об'єм охорони патенту, що видається на нього, обмежується тільки прикладеною формулою винаходу, яка викладена з посиланням на опис і креслення і без обмеження варіантів виконання, описаних тут. Наприклад, незважаючи на те, що варіанти виконання, описані вище, включають в себе штифт 80 розмикання, який забезпечує спрацювання механізму 30b розмикання контактів за допомогою контакту з важелем 40 розмикання, штифт 80 розмикання може бути виключений, так що важіль 76 повернення пружини забезпечує спрацювання механізму 30b розмикання контактів за допомогою контакту з важелем 40 розмикання. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 60 1. Мініатюрний розмикач ланцюга (МСВ), який має: пару контактів, що розмикаються, розміщених в головному ланцюгу струму між лінійною клемою і клемою навантаження; механізм розмикання для розмикання контактів при виникненні стану надструму; і електродвигун, виконаний з можливістю замикати контакти за допомогою механізму замикання контактів; причому механізм розмикання включає в себе: механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання; датчик струму, виконаний з можливістю виявлення струму в головному ланцюгу струму; і блок керування; причому блок керування: виконаний з можливістю створення сигналу розмикання для приведення в дію механізму спрацювання для приведення механізму розмикання до розмикання контактів, якщо він визначає, що виникає стан короткого замикання, основуючись на вихідному сигналі датчика струму; і додатково виконаний з можливістю приведення в дію електродвигуна для приведення механізму розмикання контактів до розмикання контактів незалежно від механізму спрацювання, якщо він визначає, що виникає стан перевантаження. 2. МСВ за п. 1, в якому механізм розмикання контактів включає в себе накопичувач механічної енергії, виконаний з можливістю вивільнення накопиченої механічної енергії для розмикання контактів при спрацюванні механізму розмикання контактів. 3. МСВ за п. 2, в якому: механізм розмикання контактів включає в себе защіпку, виконану так, що накопичувач механічної енергії вивільняє накопичену механічну енергію для розмикання контактів при вивільненні защіпки; і механізм спрацювання виконаний з можливістю запуску механізму розмикання контактів вивільненням защіпки. 4. МСВ за будь-яким із попередніх пунктів, в якому механізм спрацювання включає в себе електромеханічний привід, виконаний з можливістю приведення в дію сигналом розмикання для приведення механізму розмикання контактів до розмикання контактів при створенні сигналу розмикання. 5. МСВ за п. 4, в якому електромеханічний привід включає в себе соленоїд. 6. МСВ за п. 5, в якому електромеханічний привід включає в себе магнітно защеплюваний привід соленоїда. 7. МСВ за будь-яким із попередніх пунктів, в якому механізм спрацювання включає в себе: електромеханічний привід, виконаний з можливістю приведення в дію сигналом розмикання для створення першої сили спрацювання; механізм передачі сили, виконаний з можливістю перетворення першої сили спрацювання у другу силу спрацювання, яка більша першої сили спрацювання; причому механізм передачі сили з'єднує електромеханічний привід з механізмом розмикання контактів так, що друга сила спрацювання приводить механізм розмикання контактів до розмикання контактів. 8. МСВ за будь-яким із попередніх пунктів, в якому блок керування виконаний з можливістю приведення в дію двигуна для замикання контактів за допомогою механізму замикання контактів. 20 UA 109114 C2 5 10 15 20 9. МСВ за будь-яким із попередніх пунктів, в якому механізм замикання контактів включає в себе накопичувач механічної енергії, виконаний з можливістю накопичувати механічну енергію в результаті роботи механізму замикання і згодом з можливістю вивільняти накопичену механічну енергію для замикання контактів. 10. МСВ за будь-яким із попередніх пунктів, в якому МСВ має корпус, який містить електродвигун, при цьому корпус МСВ відповідає стандарту DIN 43880. 11. МСВ за будь-яким із попередніх пунктів, в якому: механізм розмикання включає в себе механізм спрацювання і механізм розмикання контактів, причому механізм спрацювання виконаний з можливістю приводити механізм розмикання контактів до розмикання контактів при виникненні стану надструму; електродвигун виконаний з можливістю зводити механізм розмикання подачею механічної енергії в накопичувач механічної енергії механізму розмикання. 12. МСВ за будь-яким із попередніх пунктів, в якому електродвигун виконаний з можливістю роботи в першому режимі, в якому елемент електродвигуна, що обертається, обертається в першому напрямку, і другому режимі, в якому елемент, що обертається, обертається у другому напрямку, протилежному першому напрямку, і причому електродвигун виконаний з можливістю роботи в першому режимі для замикання контактів і у другому режимі для зведення механізму розмикання. 13. МСВ за будь-яким із попередніх пунктів, в якому сигнал розмикання являє собою струм розмикання. 14. МСВ за будь-яким із попередніх пунктів, в якому блок керування включає в себе накопичувач електричної енергії, виконаний з можливістю створювати струм розмикання. 15. МСВ за п. 14, в якому накопичувач електричної енергії включає в себе конденсатор. 21 UA 109114 C2 22 UA 109114 C2 23 UA 109114 C2 24 UA 109114 C2 25 UA 109114 C2 26 UA 109114 C2 27 UA 109114 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюMiniature circuit breaker
Автори англійськоюGanley, Sean, Christopher, Stevens, John
Автори російськоюГенли Шон Кристофер, Стивенс Джон
МПК / Мітки
МПК: H01H 71/74, H01H 71/24, H01H 71/70, H01H 9/00
Мітки: мініатюрний, розмикач, ланцюга
Код посилання
<a href="https://ua.patents.su/33-109114-miniatyurnijj-rozmikach-lancyuga.html" target="_blank" rel="follow" title="База патентів України">Мініатюрний розмикач ланцюга</a>
Замикач-розмикач ланцюга (варіанти)
Номер патенту: 70390
Опубліковано: 15.10.2004
Автори: Телльє Жан-П'єр, Леглей Домінік, Боран Жилль
МПК: H01H 71/10, H01H 89/06, H01H 73/00, H01H 83/00
Мітки: замикач-розмикач, варіанти, ланцюга
Формула / Реферат:
1. Замикач-розмикач ланцюга, який містить силові провідники, забезпечені відокремлюваними нерухомими та рухомими контактами, керуючий електромагніт, виконаний з можливістю дії у відповідь на командне керування, і пристрій захисту, виконаний з можливістю дії у відповідь на виявлення несправності в електричному ланцюзі, на рухомих контактах, щонайменше через один багатополюсник, при цьому пристрій захисту містить засіб виявлення струмів, які...
Плазмовий високовольтний розмикач струму

Номер патенту: 103238
Опубліковано: 25.09.2013
Автори: Єгоренков Володимир Володимирович, Друй Олег Самойлович, Єгоров Олексій Михайлович, Юферов Володимир Борисович
МПК: H05H 1/00, H05H 15/00
Мітки: струму, розмикач, плазмовий, високовольтний
Формула / Реферат:
1. Плазмовий високовольтний розмикач струму, що включає зовнішній анод і коаксіальний відносно нього внутрішній катод та систему радіально розташованих плазмових інжекторів, який відрізняється тим, що ділянки звернених одна до одної поверхонь катода і анода біля торцевої поперечної площини катода в місці навантажувального розрядного проміжку покриті діелектриком на довжині L, що відповідає співвідношенню:3/4h<L<h, деh -...
Мініатюрний елемент живлення для електронних приладів
Номер патенту: 49470
Опубліковано: 26.04.2010
Автори: Кравчук Борис Олексійович, Котовський Віталій Йосипович, Джежеря Юрій Іванович, Домарацький Володимир Анатолійович
МПК: H01M 2/02
Мітки: електронних, живлення, мініатюрний, приладів, елемент
Формула / Реферат:
1. Мініатюрний елемент живлення для електронних приладів, що містить негативний та позитивний електроди, що розділені пакувальним кільцем електроізоляційного матеріалу, а разом утворюють циліндричний корпус кнопкового типу, який відрізняється тим, що негативний електрод виконано з виступом для контакту з клемою, а на поверхні негативного електрода між виступом та позитивним електродом додатково розміщено кільце з електроізоляційного матеріалу...
Пристрій для натягнення гусеничного ланцюга транспортного засоба
Номер патенту: 43167
Опубліковано: 10.08.2009
Автор: Трубчанін Володимир Вікторович
МПК: B62D 55/00
Мітки: пристрій, транспортного, гусеничного, засоба, ланцюга, натягнення
Формула / Реферат:
1. Пристрій для натягнення гусеничного ланцюга транспортного засобу, що містить встановлений на рамі ходового візка передній натяжний коток з механізмом фіксації, який відрізняється тим, що передній натяжний коток має вісь, яка виконана у вигляді циліндричного кривошипа, що сполучений з важелем, шарнірно з'єднаним зі механізмом фіксації, та входить в розточку рами, а другий кінець механізму фіксації шарнірно з'єднаний з важелем, розміщеним на...
Мініатюрний електронний пристрій
Номер патенту: 26316
Опубліковано: 30.08.1999
Автори: Домолечні, Джеймс Д.
МПК: E05D 3/00, H04M 1/02, E05D 7/00
Мітки: пристрій, мініатюрний, електронний
Формула / Реферат:
1. Миниатюрное электронное устройство, в частности, складной радиотелефон, содержащее первый и второй корпусные элементы, соединенные с возможностью поворота посредством шарнирного узла, предусмотренного на участке шарнирного сочленения первого корпусного элемента, по меньшей мере одну в целом цилиндрическую ось шарнира, предусмотренную в указанном участке шарнирного сочленения и определяющую ось взаимного проворота указанных корпусных...
Попередній патент: Спосіб боротьби з aad-1 однодольними самосійними рослинами кукурудзи на полях дводольних сільськогосподарських культур
Наступний патент: Газогенератор з пристроєм стабілізації процесу газифікації вологих органічних відходів
Випадковий патент: Спосіб передпроменевої підготовки хворих на рак легені