Привід рукавичного автомата
Номер патенту: 102212
Опубліковано: 26.10.2015
Автори: Музичишин Сергій Володимирович, Чабан Олексій Віталійович, Піпа Борис Федорович, Павленко Георгій Іванович

Формула / Реферат
Привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний пристроєм для зниження динамічних навантажень, що містить пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою.
Текст
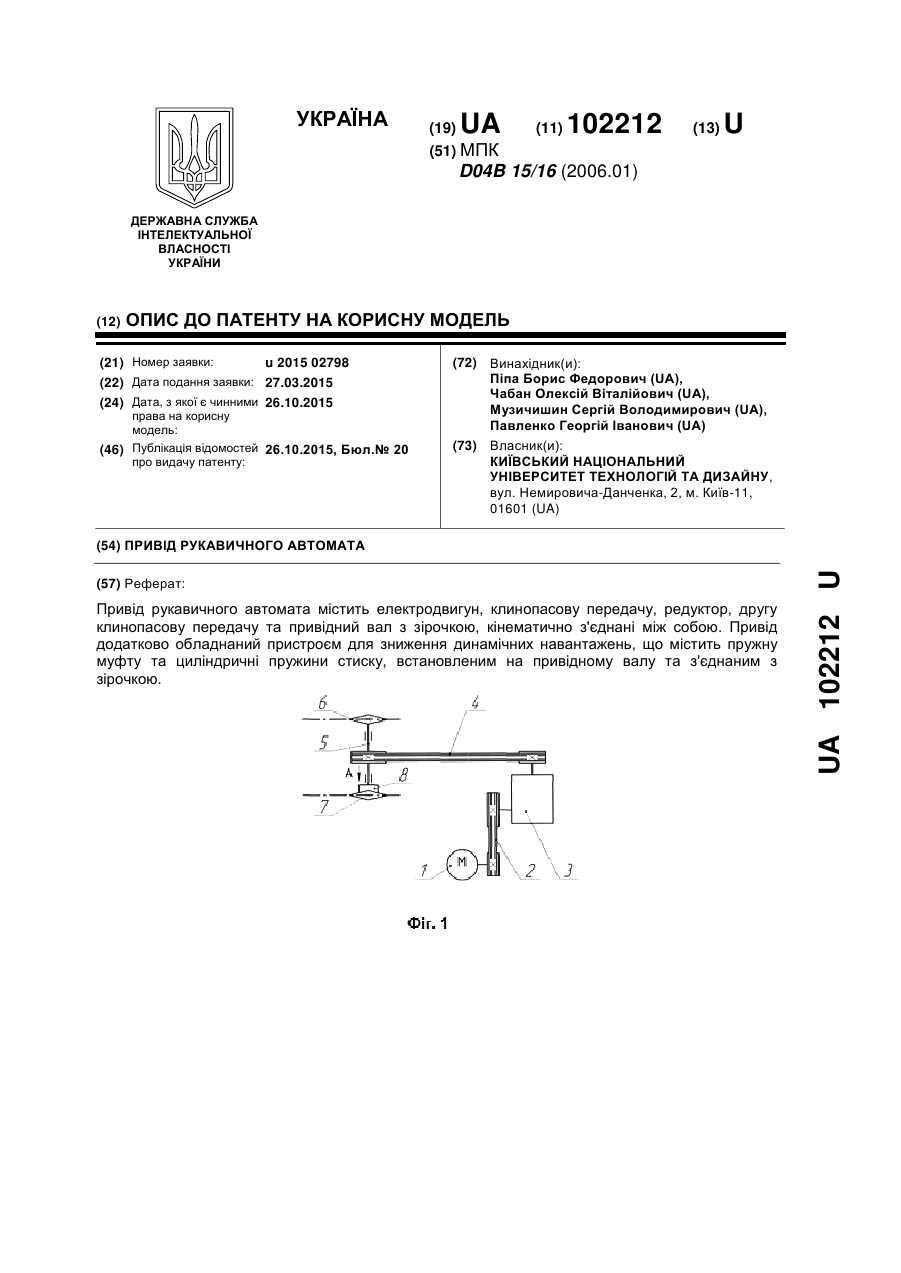
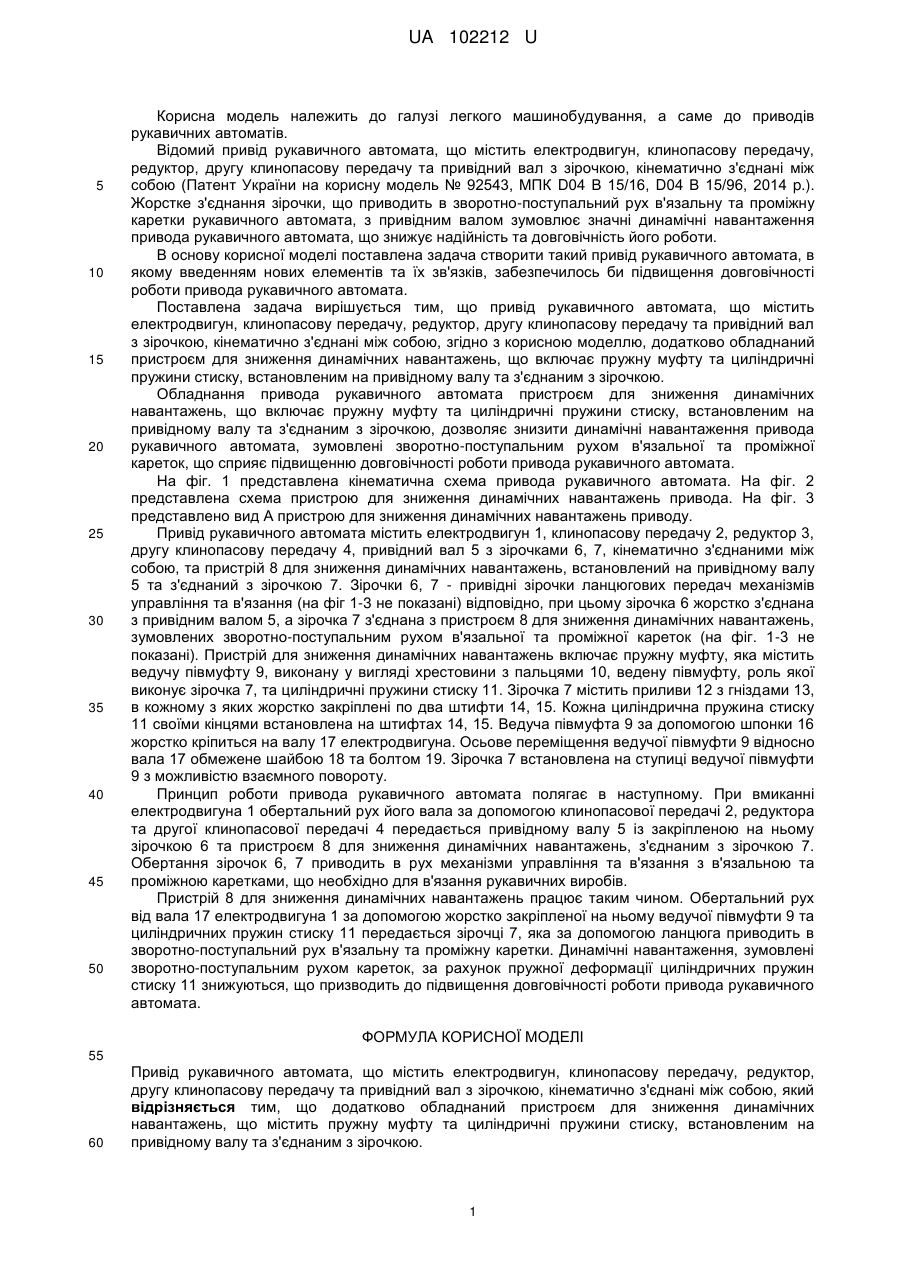
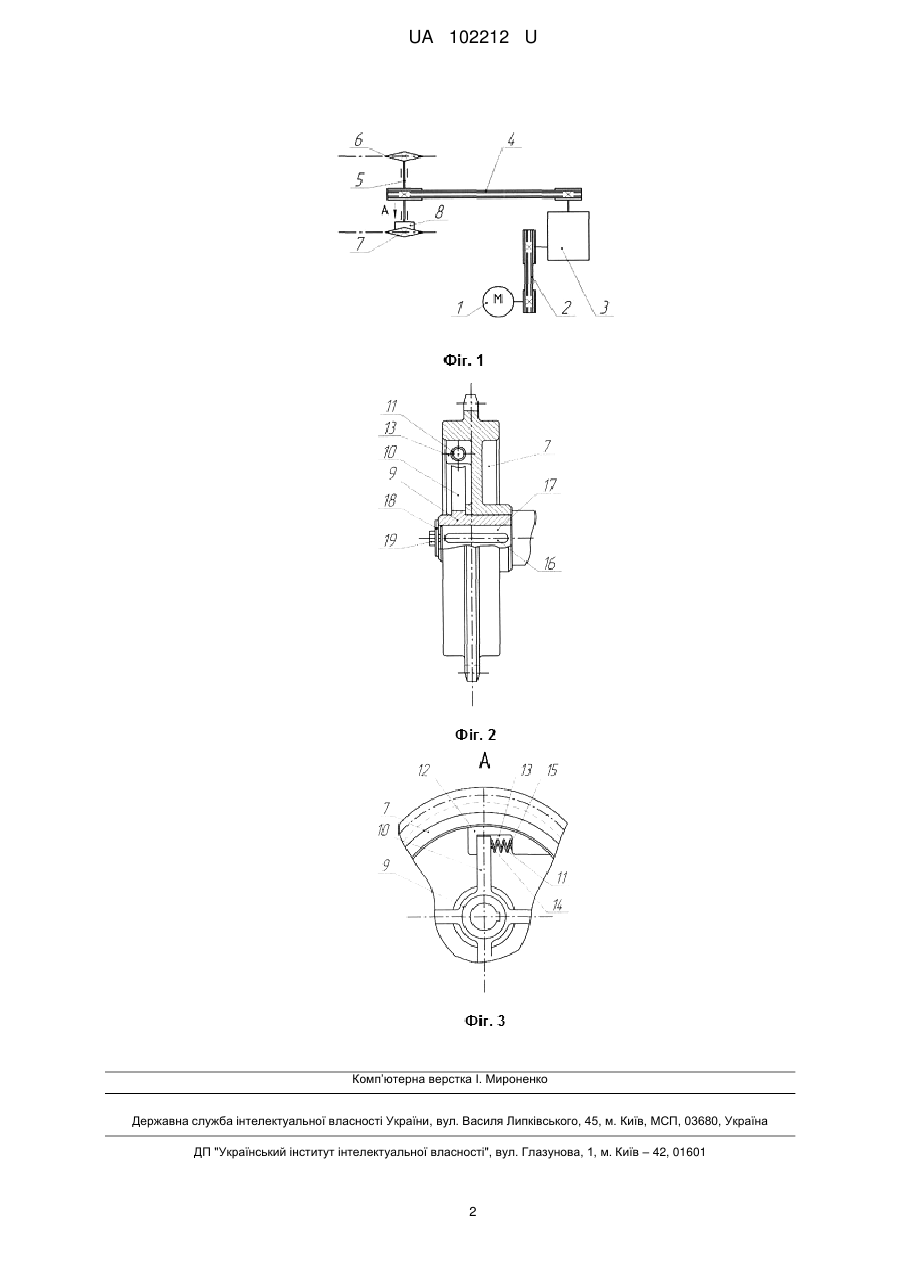
Реферат: Привід рукавичного автомата містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою. Привід додатково обладнаний пристроєм для зниження динамічних навантажень, що містить пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою. UA 102212 U (54) ПРИВІД РУКАВИЧНОГО АВТОМАТА UA 102212 U UA 102212 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою (Патент України на корисну модель № 92543, МПК D04 В 15/16, D04 В 15/96, 2014 p.). Жорстке з'єднання зірочки, що приводить в зворотно-поступальний рух в'язальну та проміжну каретки рукавичного автомата, з привідним валом зумовлює значні динамічні навантаження привода рукавичного автомата, що знижує надійність та довговічність його роботи. В основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності роботи привода рукавичного автомата. Поставлена задача вирішується тим, що привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою, згідно з корисною моделлю, додатково обладнаний пристроєм для зниження динамічних навантажень, що включає пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою. Обладнання привода рукавичного автомата пристроєм для зниження динамічних навантажень, що включає пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою, дозволяє знизити динамічні навантаження привода рукавичного автомата, зумовлені зворотно-поступальним рухом в'язальної та проміжної кареток, що сприяє підвищенню довговічності роботи привода рукавичного автомата. На фіг. 1 представлена кінематична схема привода рукавичного автомата. На фіг. 2 представлена схема пристрою для зниження динамічних навантажень привода. На фіг. 3 представлено вид А пристрою для зниження динамічних навантажень приводу. Привід рукавичного автомата містить електродвигун 1, клинопасову передачу 2, редуктор 3, другу клинопасову передачу 4, привідний вал 5 з зірочками 6, 7, кінематично з'єднаними між собою, та пристрій 8 для зниження динамічних навантажень, встановлений на привідному валу 5 та з'єднаний з зірочкою 7. Зірочки 6, 7 - привідні зірочки ланцюгових передач механізмів управління та в'язання (на фіг 1-3 не показані) відповідно, при цьому зірочка 6 жорстко з'єднана з привідним валом 5, а зірочка 7 з'єднана з пристроєм 8 для зниження динамічних навантажень, зумовлених зворотно-поступальним рухом в'язальної та проміжної кареток (на фіг. 1-3 не показані). Пристрій для зниження динамічних навантажень включає пружну муфту, яка містить ведучу півмуфту 9, виконану у вигляді хрестовини з пальцями 10, ведену півмуфту, роль якої виконує зірочка 7, та циліндричні пружини стиску 11. Зірочка 7 містить приливи 12 з гніздами 13, в кожному з яких жорстко закріплені по два штифти 14, 15. Кожна циліндрична пружина стиску 11 своїми кінцями встановлена на штифтах 14, 15. Ведуча півмуфта 9 за допомогою шпонки 16 жорстко кріпиться на валу 17 електродвигуна. Осьове переміщення ведучої півмуфти 9 відносно вала 17 обмежене шайбою 18 та болтом 19. Зірочка 7 встановлена на ступиці ведучої півмуфти 9 з можливістю взаємного повороту. Принцип роботи привода рукавичного автомата полягає в наступному. При вмиканні електродвигуна 1 обертальний рух його вала за допомогою клинопасової передачі 2, редуктора та другої клинопасової передачі 4 передається привідному валу 5 із закріпленою на ньому зірочкою 6 та пристроєм 8 для зниження динамічних навантажень, з'єднаним з зірочкою 7. Обертання зірочок 6, 7 приводить в рух механізми управління та в'язання з в'язальною та проміжною каретками, що необхідно для в'язання рукавичних виробів. Пристрій 8 для зниження динамічних навантажень працює таким чином. Обертальний рух від вала 17 електродвигуна 1 за допомогою жорстко закріпленої на ньому ведучої півмуфти 9 та циліндричних пружин стиску 11 передається зірочці 7, яка за допомогою ланцюга приводить в зворотно-поступальний рух в'язальну та проміжну каретки. Динамічні навантаження, зумовлені зворотно-поступальним рухом кареток, за рахунок пружної деформації циліндричних пружин стиску 11 знижуються, що призводить до підвищення довговічності роботи привода рукавичного автомата. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний пристроєм для зниження динамічних навантажень, що містить пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою. 1 UA 102212 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of glove machine
Автори англійськоюPipa Borys Fedorovych, Chaban Oleksii Vitaliyovych, Muzychyshyn Sergii Volodymyrovych, Pavlenko Georgii Ivanovych
Назва патенту російськоюПривод перчаточного автомата
Автори російськоюПипа Борис Федорович, Чабан Алексей Витальевич, Музычишин Сергей Владимирович, Павленко Георгий Иванович
МПК / Мітки
МПК: D04B 15/16
Мітки: рукавичного, привід, автомата
Код посилання
<a href="https://ua.patents.su/4-102212-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата

Номер патенту: 98327
Опубліковано: 27.04.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович, Павленко Георгій Іванович, Чабан Олексій Віталійович
МПК: D04B 15/94, D04B 15/16
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, встановленим на валу електродвигуна, який відрізняється тим, що додатково оснащений демпфіруючим пристроєм з пружними елементами, виконаними у вигляді радіальних пакетів плоских пружин, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом.
Привід рукавичного автомата
Номер патенту: 101147
Опубліковано: 25.08.2015
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович, Музичишин Сергій Володимирович, Павленко Георгій Іванович
МПК: D04B 15/96, D04B 15/16
Мітки: автомата, рукавичного, привід
Формула / Реферат:
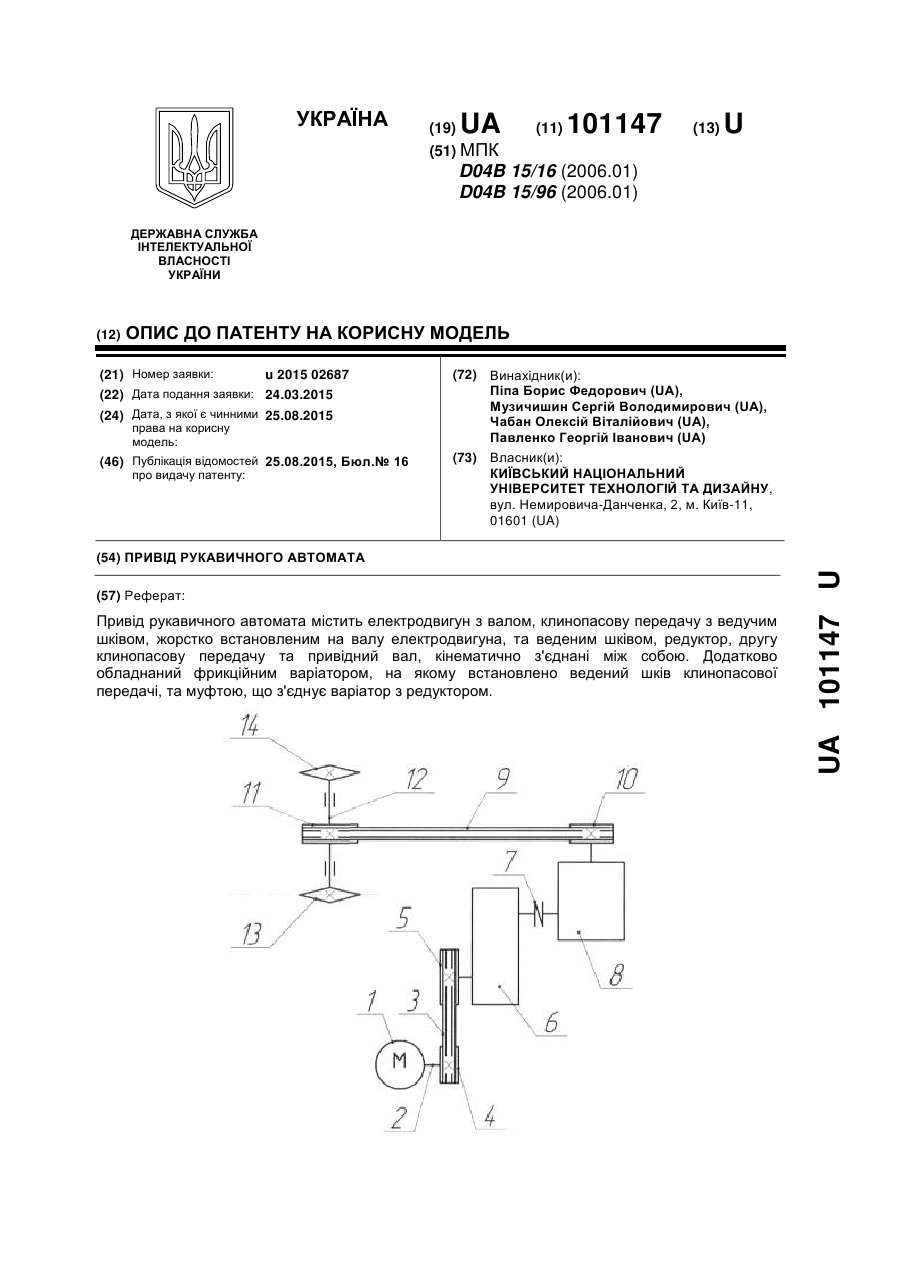
Привід рукавичного автомата, що містить електродвигун з валом, клинопасову передачу з ведучим шківом, жорстко встановленим на валу електродвигуна, та веденим шківом, редуктор, другу клинопасову передачу та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний фрикційним варіатором, на якому встановлено ведений шків клинопасової передачі, та муфтою, що з'єднує варіатор з редуктором.
Привід рукавичного автомата
Номер патенту: 95880
Опубліковано: 12.01.2015
Автори: Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: рукавичного, автомата, привід
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, механічні передачі та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний обгінною муфтою та мотор-редуктором, розташованим співвісно з електродвигуном та з'єднаним з ним за допомогою обгінної муфти.
Привід рукавичного автомата
Номер патенту: 94413
Опубліковано: 10.11.2014
Автори: Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: автомата, рукавичного, привід
Формула / Реферат:
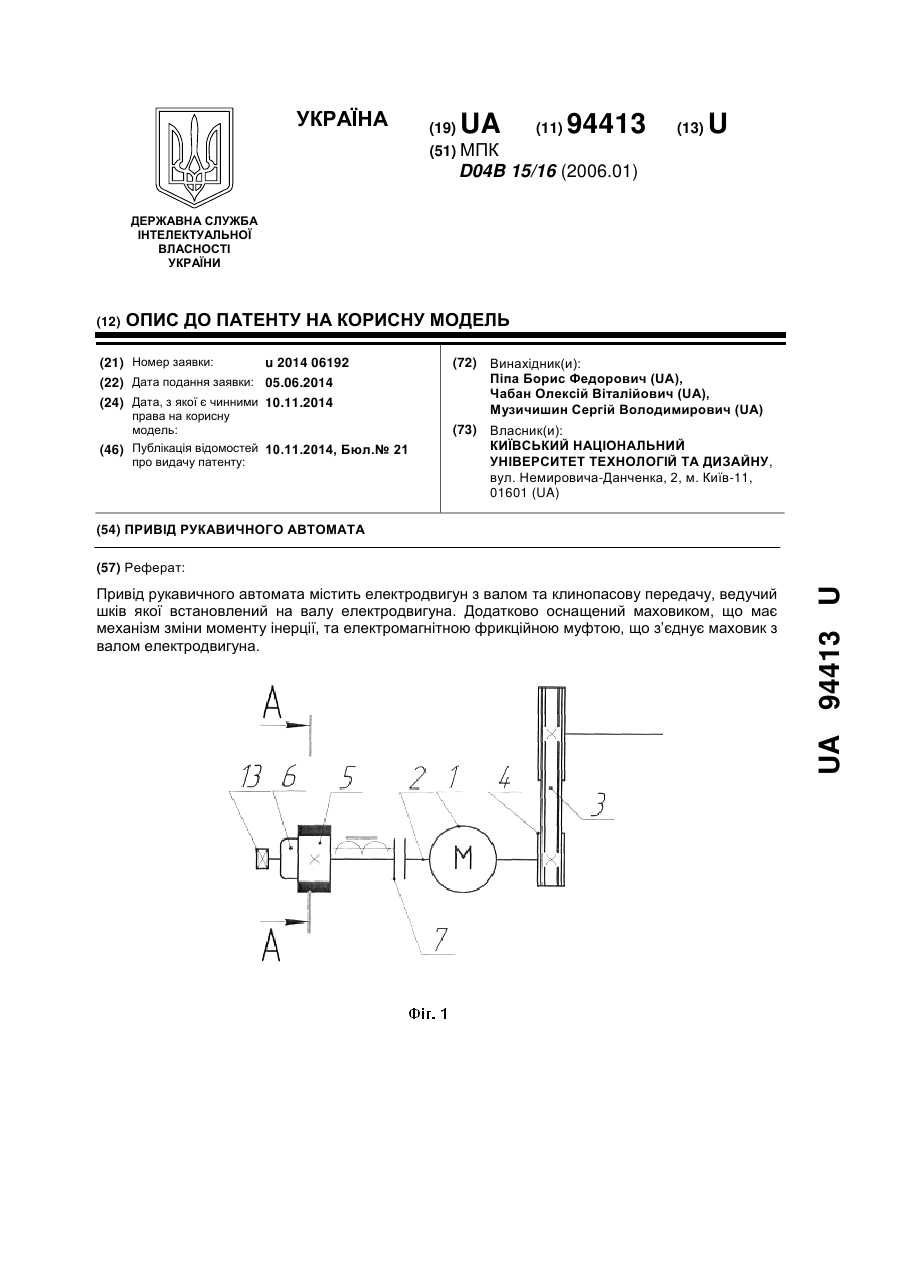
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу, ведучий шків якої встановлений на валу електродвигуна, який відрізняється тим, що додатково оснащений маховиком, що має механізм зміни моменту інерції, та електромагнітною фрикційною муфтою, що з’єднує маховик з валом електродвигуна.
Привід рукавичного автомата
Номер патенту: 92621
Опубліковано: 26.08.2014
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/16, D04B 15/96
Мітки: автомата, рукавичного, привід
Формула / Реферат:
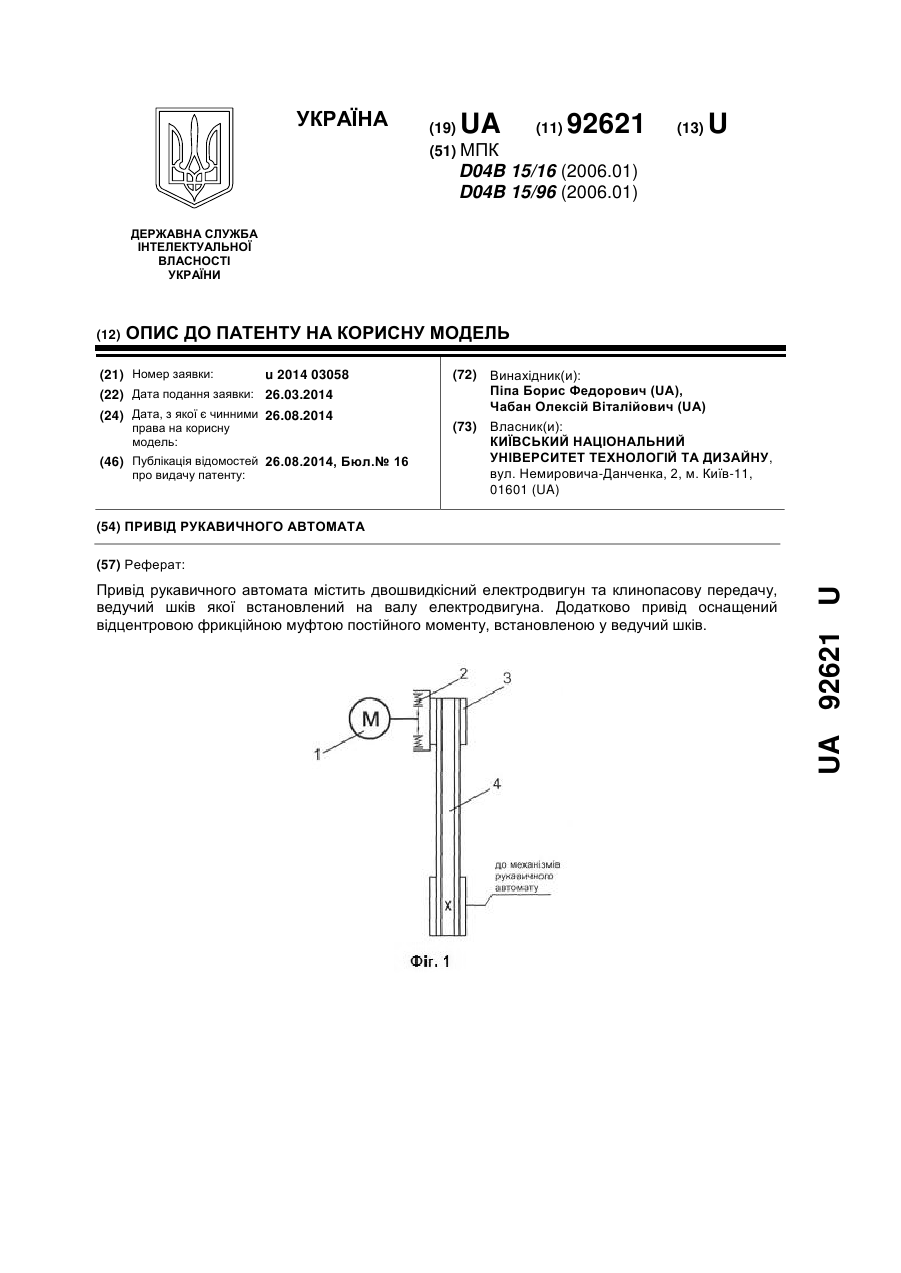
Привід рукавичного автомата, що містить двошвидкісний електродвигун та клинопасову передачу, ведучий шків якої встановлений на валу електродвигуна, який відрізняється тим, що додатково оснащений відцентровою фрикційною муфтою постійного моменту, встановленою у ведучий шків.