Спосіб моделювання руху судна
Номер патенту: 10225
Опубліковано: 15.11.2005
Автори: Мартинов Дмитро Вячеславович, Іванов Володимир Володимирович, Гриб Олександр Сергійович
Формула / Реферат
1. Спосіб моделювання руху судна шляхом створення навігаційної обстановки, наближеної до реальної, та імітації руху відповідно до розробленого завдання за допомогою комп'ютерних програм апаратно-навчального комплексу, який відрізняється тим, що в окремі блоки задають вхідні параметри - аеродинамічні сили, гідродинамічні сили, сили дій підрегулювальних пристроїв, силу, викликану опором пера руля, сили, викликані роботою силових установок судна, сили опору із землею, суднами, конструкціями, сили взаємодії з буксиром, силу, викликану якорем та сили натягання швартових тросів, а також конструктивні параметри, після цього з окремих блоків команди надходять до комп'ютерного блоку, де відбувається визначення руху та моменту руху за допомогою векторних диференційних рівнянь, а потім вихідні параметри моделювання передають у блоки програмного модуля візуалізації, програмного модуля імітації роботи радіолокаційної системи, вирішення задач системи автоматичної радіолокаційної прокладки, вирішення задач електронної картографічної навігаційно-інформаційної системи, програмного модуля імітації робіт радіонавігаційного обладнання, програмного модуля імітації роботи гірокомпаса та магнітного компаса, програмного модуля роботи ехолота.
2. Спосіб за п. 1, який відрізняється тим, що визначення руху та моменту руху здійснюють за допомогою таких векторних диференційних рівнянь:
 ,
,
де ![]() – вектор руху центра інерції судна ;
– вектор руху центра інерції судна ;
![]() - власний момент імпульсу судна як твердого тіла;
- власний момент імпульсу судна як твердого тіла;
![]() - сумарний вектор зовнішніх сил, що діють на судно;
- сумарний вектор зовнішніх сил, що діють на судно;
![]() - сумарний момент імпульсів, що діють на судно;
- сумарний момент імпульсів, що діють на судно;
![]() та
та ![]() - матриці коефіцієнтів корекції сил.
- матриці коефіцієнтів корекції сил.
3. Спосіб за п. 1, який відрізняється тим, що аеродинамічними силами є опір, сила та швидкість вітру.
4. Спосіб за п. 1 або п. 3, який відрізняється тим, що аеродинамічні сили задаються оператором тренажера як векторне поле.
5. Спосіб за п. 1, або п. 3, або п. 4, який відрізняється тим, що аеродинамічні сили задають у будь-який момент процесу моделювання.
6. Спосіб за п. 1, який відрізняється тим, що гідродинамічними силами є напрямок та швидкість течії, кут набігання та сила хвилі, висота хвилі та напрямок її розповсюдження, сила опору води на корпус судна.
7. Спосіб за п. 6, який відрізняється тим, що напрямок та швидкість течії задається оператором тренажера як векторне поле у будь-який момент процесу моделювання.
8. Спосіб за п. 6, який відрізняється тим, що кут набігання та силу хвилі визначають за геометричною конструкцією судна, напрямком та швидкістю вітру, напрямком та швидкістю течії.
9. Спосіб за п. 6, який відрізняється тим, що висоту хвилі та напрямок її розповсюдження визначають швидкістю та напрямком аеродинамічних сил, глибиною течії та глибиною кожної ділянки району плавання.
10. Спосіб за п. 6, який відрізняється тим, що силу опору води на корпус судна визначають геометрією корпуса судна.
11. Спосіб за п. 1, який відрізняється тим, що силу, викликану опором пера руля, визначають геометрією пера руля, конструктивним розміщенням та кутом перекладки руля, що задається оператором або авторульовим.
12. Спосіб за п. 1, який відрізняється тим, що сили, викликані роботою силових установок судна, визначаються геометрією розміщення та кількістю гвинтів, кількістю та геометрією лопатей гвинтів, що використовуються на судні, режимами керування.
13. Спосіб за п. 1, який відрізняється тим, що силу, викликану якорем, визначають масою якоря, кількістю попущеного якірного ланцюга, що задає оператор тренажера, геометричним розміщенням якоря на корпусі судна, ландшафтом дна.
14. Спосіб за п. 1, який відрізняється тим, що силу взаємодії з буксиром визначають з умов буксирування судна, що визначає судноводій буксира.
15. Спосіб за п. 1, який відрізняється тим, що силу натягання швартових тросів на судні визначають довжиною тросів, масою судна, швидкістю та напрямком течії, швидкістю та напрямком вітру.
Текст
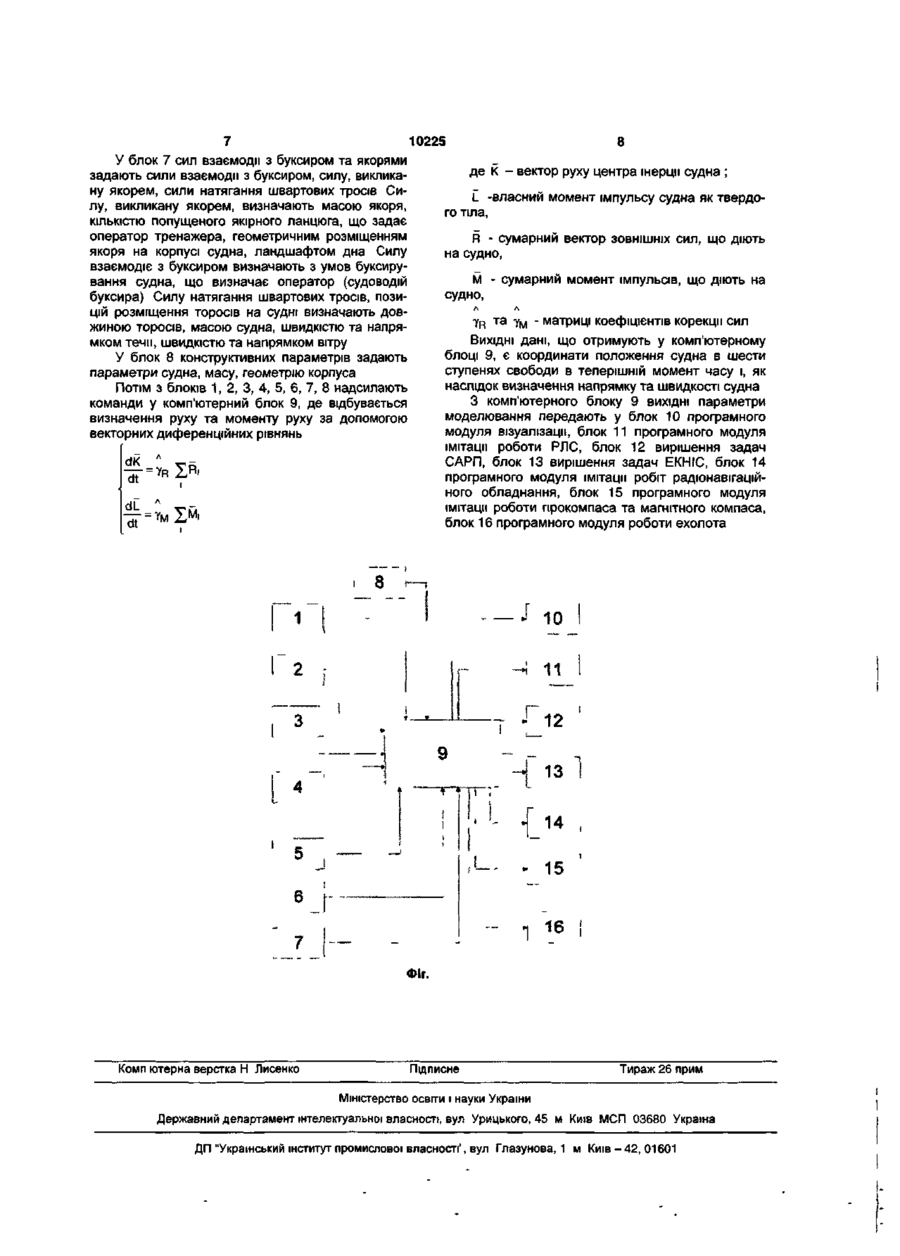
1. Спосіб моделювання руху судна шляхом створення навігаційної обстановки, наближеної до реальної, та імітації руху відповідно до розробленого завдання за допомогою комп'ютерних програм апаратно-навчального комплексу, який відрізняється тим, що в окремі блоки задають вхідні параметри - аеродинамічні сили, гідродинамічні сили, сили дій підрегулювальних пристроїв, силу, викликану опором пера руля, сили, викликані роботою силових установок судна, сили опору із землею, суднами, конструкціями, сили взаємодії з буксиром, силу, викликану якорем та сили натягання швартових тросів, а також конструктивні параметри, після цього з окремих блоків команди надходять до комп'ютерного блоку, де відбувається визначення руху та моменту руху за допомогою векторних диференційних рівнянь, а потім вихідні параметри моделювання передають у блоки програмного модуля візуалізації, програмного модуля імітації роботи радіолокаційної системи, вирішення задач системи автоматичної радіолокаційної прокладки, вирішення задач електронної картографічної навігаційно-інформаційної системи, програмного модуля імітації робіт радіонавігаційного обладнання, програмного модуля імітації роботи гірокомпаса та магнітного компаса, програмного модуля роботи ехолота. 2. Спосіб за п. 1, який відрізняється тим, що визначення руху та моменту руху здійснюють за допомогою таких векторних диференційних рівнянь: d K dt dL де к - вектор руху центра інерції судна ; L - власний момент імпульсу судна як твердого тіла; Ri - сумарний вектор зовнішніх сил, що діють на судно; Мі - сумарний момент імпульсів, що діють на судно; Л Л YR т а YM • матриці коефіцієнтів корекції сил. 3. Спосіб за п. 1, який відрізняється тим, що аеродинамічними силами є опір, сила та швидкість вітру. 4. Спосіб за п. 1 або п. З, який відрізняється тим, що аеродинамічні сили задаються оператором тренажера як векторне поле. 5. Спосіб за п. 1, або п. З, або п. 4, який відрізняється тим, що аеродинамічні сили задають у будьякий момент процесу моделювання. 6. Спосіб за п. 1, який відрізняється тим, що гідродинамічними силами є напрямок та швидкість течії, кут набігання та сила хвилі, висота хвилі та напрямок її розповсюдження, сила опору води на корпус судна. 7. Спосіб за п. 6, який відрізняється тим, що напрямок та швидкість течії задається оператором тренажера як векторне поле у будь-який момент процесу моделювання. 8. Спосіб за п. 6, який відрізняється тим, що кут набігання та силу хвилі визначають за геометричною конструкцією судна, напрямком та швидкістю вітру, напрямком та швидкістю течії. 9. Спосіб за п. 6, який відрізняється тим, що висоту хвилі та напрямок її розповсюдження визначають швидкістю та напрямком аеродинамічних сил, глибиною течії та глибиною кожної ділянки району плавання. 10. Спосіб за п. 6, який відрізняється тим, що силу опору води на корпус судна визначають геометрією корпуса судна. 11. Спосіб за п. 1, який відрізняється тим, що силу, викликану опором пера руля, визначають геометрією пера руля, конструктивним розміщенням та кутом перекладки руля, що задається оператором або авторульовим. 12. Спосіб за п. 1, який відрізняється тим, що сили, викликані роботою силових установок судна, визначаються геометрією розміщення та кількістю ю С\І CM О) 10225 4 14 Спосіб за п 1, який відрізняється тим, що гвинтів, КІЛЬКІСТЮ та геометрією лопатей гвинтів, силу взаємодії з буксиром визначають з умов букщо використовуються на судні, режимами керусирування судна, що визначає судноводій буксира вання 15 Спосіб за п 1, який відрізняється тим, що 13 Спосіб за п 1, який відрізняється тим, що силу натягання швартових тросів на судні визнасилу, викликану якорем, визначають масою якоря, чають довжиною тросів, масою судна, швидкістю КІЛЬКІСТЮ попущеного якірного ланцюга, що задає та напрямком течи, швидкістю та напрямком вітру оператор тренажера, геометричним розміщенням якоря на корпусі судна, ландшафтом дна Корисна модель належить до галузі моделювання при навчанні керування транспортними засобами, зокрема суднами, і може бути використана у судноводінні та навігаційних тренажерах для вирішення задач візуалізацп, імітації роботи радіонавігаційних приладів тощо Відомо спосіб керування приводними ланками шестиступеневого динамічного стенда опорного типу, який полягає в тому, що створюють ЛІНІЙНІ та кутові рухи платформи динамічного стенда відносно трьох взаємо перпендикулярних осей обертання, положення яких по кутах тангажа та рискання задають у поздовжньому напрямку в межах діапазону, що визначають з умови забезпечення максимальних та рівних у позитивному та від'ємному напрямах ЛІНІЙНИХ переміщень [патент України №20060 на винахід, G09B9/00, 1995] Цей спосіб належить до галузі авіаційної та космічної техніки ЛІНІЙНІ та кутові рухи платформи динамічного стенда створюють відносно трьох взаємо перпендикулярних осей обертання, що недостатньо при створенні способу моделювання руху судна, де, крім аеродинамічних сил, діють гідродинамічні та ІНШІ СИЛИ І потрібно моделювання по шести ступенях свободи - рух у плоскості XY, координата z, кути крену і тангажа Найближчим до корисної моделі, що заявляється, є спосіб тренажерної підготовки лоцманів, який полягає у формуванні навичок з маневрування і керування судном та з регулювання руху суден за допомогою комп'ютерних програм апаратно-програмного комплексу навчальних навігаційних МІСТКІВ суден і постів регулювання руху суден, яким створюють фактичну навігаційну обстановку у заданій акваторії, дані про яку одержують від лоцманів-операторів постів регулювання руху суден, розробляють додаткове завдання з маневрування та керування судном, що підлягає проведенню, порівнюють результати навчальних і дій, відпрацьованих у реальних умовах, та дають їм оцінку [деклараційний патент України №3522 на корисну модель, G09B9/06, 2004] Зазначений спосіб призначено лише для тренажерної підготовки лоцманів, тому він не враховує ряд сил, що діють на судно, і його програма недостатня для моделювання руху судна В основу корисної моделі поставлено задачу створення способу моделювання руху судна з шістьма ступенями свободи, який би враховував усі ЗОВНІШНІ сили, що діють на судно, шляхом введення нових прийомів для підвищення якості навчання керування судном у судноводінні та навігаційних тренажерах Поставлену задачу вирішують тим, що у спо собі моделювання руху судна шляхом створення навігаційної обстановки, наближеної до реальної, та імітації руху ВІДПОВІДНО ДО розробленого завдання за допомогою компютерних програм апаратно-навчального комплексу, згідно з корисною моделлю, в окремі блоки задають ВХІДНІ параметри - аеродинамічні сили, гідродинамічні сили, сили дій підрегулювальних пристроїв, силу, викликану опором пера руля, сили, викликані роботою силових установок судна, сили опору із землею, судами, конструкціями, сили взаємодії з буксиром, силу, викликану якорем та сили натягання швартових тросів, а також конструктивні параметри, після цього з окремих блоків команди надходять до комп'ютерного блоку, де відбувається визначення руху та моменту руху за допомогою векторних диференційних рівнянь, а потім ВИХІДНІ параметри моделювання передають у блоки програмного модуля візуалізацп, програмного модуля імітації роботи радіолокаційної системи, вирішення задач системи автоматичної радіолокаційної прокладки, вирішення задач електронної картографічної навігаційно-інформаційної системи, програмного модуля імітації робіт радіонавігаційного обладнання, програмного модуля імітації роботи гірокомпаса та магнітного компаса, програмного модуля роботи ехолота Визначення руху та моменту руху здійснюють за допомогою таких векторних диференційних рівнянь dK — dt де К - вектор руху центра інерції судна , L -власний момент імпульсу судна як твердого тіла, R - сумарний вектор ЗОВНІШНІХ сил, що діють на судно, М - сумарний момент імпульсів, що діють на судно, Л Л y R та у м - матриці коефіцієнтів корекції сил Аеродинамічними силами є опір, сила та швидкість вітру Аеродинамічні сили задаються оператором тренажера як векторне поле Аеродинамічні сили задають у будь-який момент процесу моделювання Гідродинамічними силами є напрямок та шви дкість течи, кут набігу та сила хвилі, висота хвилі та напрямок її розповсюдження, сила опору води на корпус судна Напрямок та швидкість течи задається оператором тренажера як векторне поле у будь-який момент процесу моделювання Кут набігу та силу хвилі визначають за геометричною конструкцією судна, напрямком та швидкістю вітру, напрямком та швидкістю течи Висоту хвилі та напрямок її розповсюдження визначають швидкістю та напрямком аеродинамічних сил, глибиною течи та глибиною кожної ділянки району плавання Силу опору води на корпус судна визначають геометрією корпуса судна Силу, викликану опором пера руля, визначають геометрією пера руля, конструктивним розміщенням та кутом перекладки руля, що задається оператором або авторулевим Сили, викликані роботою силових установок судна, визначаються геометрією розміщення та КІЛЬКІСТЮ гвинтів, КІЛЬКІСТЮ та геометрією лопатей гвинтів, що використовуються на судні, режимами керування Силу, викликану якорем, визначають масою якоря, КІЛЬКІСТЮ попущеного якірного ланцюга, що задає оператор тренажера, геометричним розміщенням якоря на корпусі судна, ландшафтом дна Силу взаємодії з буксиром визначають з умов буксирування судна, що визначає судоводій буксира Силу натягання швартових тросів на судні визначають довжиною торосів, масою судна, швидкістю та напрямком течи, швидкістю та напрямком вітру Корисна модель Фіг пояснюється схемою моделювання руху судна На схемі зображено блок 1 аеродинамічних сил, блок 2 гідродинамічних сил, блок 3 сили дій підрегулювальних пристроїв, блок 4 сили опору пера руля, блок 5 сил роботи силових установок судна, блок 6 сил опору із землею, судами, конструкціями, блок 7 сил взаємодії з буксиром та якорями, блок 8 конструктивних параметрів Усі блоки 1,2,3, 4, 5, 6, 7, 8 сполучено з комп'ютерним блоком 9, де відбувається визначення руху та моменту руху за допомогою векторних рівнянь Комп'ютерний блок 9 сполучено з блоком 10 програмного модуля візуалізацп, блоком 11 програмного модуля імітації роботи радіолокаційної системи (РЛС), блоком 12 вирішення задач системи автоматичної радіолокаційної прокладки (САРН), блоком 13 вирішення задач електронної картографічної навігаційно-інформаційної системи (ЕКНІС), блоком 14 програмного модуля імітації робіт радіонавігаційного обладнання, блоком 15 програмного модуля імітації роботи гірокомпаса та магнітного компаса, блоком 16 програмного модуля роботи ехолота При моделюванні руху судна його розглядають як тверде тіло з шістьма ступенями свободи Для моделювання використовують математичну модель, яку будують таким чином, щоб забезпечити можливість визначення зміни положення судна під дією сил, що діють на нього у визначених точках прикладання, при цьому враховується шість ступенів свободи (рух у плоскості XY, координата 10225 z, кути крену и тангажа) При визначенні руху судна враховують вплив наступних сил - аеродинамічні сили (опір, напрямок та швидкість вітру), - гідродинамічні сили (напрямок та швидкість течи, кут набігу та сила хвилі, висота хвилі та напрямок м розповсюдження, сила опору води на корпус судна), - сили дії підрегулювальних пристроїв, - силу, викликану опором пера руля, - сили, викликані роботою силових установок судна, - сили опору із землею, судами, конструкціями, - сили взаємодії з буксиром, силу, викликану якорем, сили натягання швартових тросів Дію кожної із сил враховують нерозривно з точкою прикладення цих сил до корпусу судна Усі сили можуть змінювати силу и напрям своєї дм у будь-який момент часу моделювання, чим досягають максимальну реалістичність моделювання руху(маневрування) Спосіб здійснюють наступним чином У блок 1 аеродинамічних сил від оператора тренажера задають опір вітру, напрямок та його швидкість як векторне поле, причому можуть задавати в будь-який процесу моделювання У блок 2 гідродинамічних сил задають напрямок та швидкість течи, кут набігу та силу хвилі, висоту хвилі та напрямок ґі розповсюдження, силу опору води на корпус судна Напрямок та швидкість течи задається оператором тренажера як векторне поле, причому у будь-який момент процесу моделювання Кут набігу та силу хвилі визначають за геометричною конструкцією судна, напрямком та швидкістю вітру, напрямком та швидкістю течи Висоту хвилі та напрямок її розповсюдження визначають швидкістю та напрямком аеродинамічних сил, глибиною течи та глибиною кожної ділянки району плавання Силу опору води на корпус судна визначають геометрією корпуса судна У блок 3 сили дій підрегулювальних пристроїв задають сили дії підрулювальних пристроїв, які визначають геометрією розміщення підрулювальних пристроїв на судні та командами керування підрулювальних пристроїв, що віддає оператор тренажера У блок 4 сили опору пера руля задають силу, викликану опором пера руля, яку визначають геометрією пера руля, конструктивним розміщенням та кутом перекладки руля, що задається оператором або авторулевим У блок 5 сил роботи силових установок судна задають сили, викликані роботою силових установок судна, що визначаються геометрією розміщення та КІЛЬКІСТЮ гвинтів, КІЛЬКІСТЮ та геометрією лопатей гвинтів, що використовуються на судні, режимами керування Кожному типу корабля відповідає своя силова установка У блок 6 сил опору із землею, судами, конструкціями задають сили опору (взаємодією) із землею, судами, конструкціями Судна, що проходять поруч один з одним, чинять взаємний фізичний вплив, викликаний гідродинамічними силами 10225 У блок 7 сил взаємодії з буксиром та якорями задають сили взаємодії з буксиром, силу, викликану якорем, сили натягання швартових тросів Силу, викликану якорем, визначають масою якоря, КІЛЬКІСТЮ попущеного якірного ланцюга, що задає оператор тренажера, геометричним розміщенням якоря на корпусі судна, ландшафтом дна Силу взаємодіє з буксиром визначають з умов буксирування судна, що визначає оператор (судоводій буксира) Силу натягання швартових тросів, позицій розміщення торосів на судні визначають довжиною торосів, масою судна, швидкістю та напрямком течи, швидкістю та напрямком вітру У блок 8 конструктивних параметрів задають параметри судна, масу, геометрію корпуса Потім З блоків 1, 2, 3, 4, 5, 6, 7, 8 надсилають команди у комп'ютерний блок 9, де відбувається визначення руху та моменту руху за допомогою векторних диференційних рівнянь d K де К - вектор руху центра інерції судна ; І_ -власний момент імпульсу судна як твердого тіла, R - сумарний вектор ЗОВНІШНІХ сил, що діють на судно, М - сумарний момент імпульсів, що діють на судно, Л Л y R та у м - матриці коефіцієнтів корекції сил ВИХІДНІ дані, що отримують у комп'ютерному блоці 9, є координати положення судна в шести ступенях свободи в теперішній момент часу і, як наслідок визначення напрямку та швидкості судна З комп'ютерного блоку 9 ВИХІДНІ параметри моделювання передають у блок 10 програмного модуля візуалізаци, блок 11 програмного модуля імітації роботи РЛС, блок 12 вирішення задач САРП, блок 13 вирішення задач ЕКНІС, блок 14 програмного модуля імітації робіт радіонавігаційного обладнання, блок 15 програмного модуля імітації роботи гірокомпаса та магнітного компаса, блок 16 програмного модуля роботи ехолота 8 10 2 11 З 12 13 14 J 15 16 ФІГ. Комп ютерна верстка Н Лисенко Підписне Тираж 26 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45 м Київ МСП 03680 Україна ДП "Український інститут промислової власності', вул Глазунова, 1 м Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for simulating motion of a ship
Автори англійськоюIvanov Volodymyr Volodymyrovych
Назва патенту російськоюСпособ моделирования движения судна
Автори російськоюИванов Владимир Владимирович
МПК / Мітки
МПК: G09B 9/00
Мітки: спосіб, руху, моделювання, судна
Код посилання
<a href="https://ua.patents.su/4-10225-sposib-modelyuvannya-rukhu-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб моделювання руху судна</a>
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці
Номер патенту: 63187
Опубліковано: 15.01.2004
Автори: Марчук Володимир Єфремович, Шульга Іван Федорович
МПК: F01D 1/00
Мітки: судна, енергії, використання, двигуна, спосіб, газоповітряного, повітряного, стоянці, руху, потоку
Формула / Реферат:
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці, при якому спалюють паливо, прогрівають і перевіряють якість роботи двигуна повітряного судна на стоянці, відхиляють і розсіюють газоповітряний потік за межами двигуна повітряного судна на стоянці, який відрізняється тим, що під час відхилювання та розсіювання газоповітряного потоку за межами двигуна повітряного судна на стоянці перетворюють енергію...
Спосіб зниження опору води руху судна
Номер патенту: 68507
Опубліковано: 16.08.2004
Автори: Хільський В'ячеслав Петрович, Чорний Анатолій Петрович, Казакєвіч Вячєслав Івановіч
Мітки: води, опору, судна, спосіб, зниження, руху
Формула / Реферат:
1. Спосіб зниження опору води руху судна, що полягає у зниженні загальної та місцевої шорсткості підводної поверхні його корпуса, боротьбі з обростанням і корозією корпуса нанесенням покриття на нього, який відрізняється тим, що підводну поверхню корпуса судна покривають пластинами або стрічками із гуми, які закріплюють на ньому, наприклад, водостійким клеєм.2. Спосіб за п. 1, який відрізняється тим, що пластинами або стрічками із гуми...
Спосіб градуювання розподіленого термоперетворювача під час руху судна
Номер патенту: 14153
Опубліковано: 25.04.1997
Автори: Журавлев Віктор Михайлович, Колтаков Володимир Миколайович, Батаев Олександр Володимирович
МПК: G01K 15/00
Мітки: спосіб, градуювання, термоперетворювача, руху, розподіленого, судна
Формула / Реферат:
Способ градуировки распределенного термопреобразователя на ходу судна, заключающийся в вытравливании с помощью гидрологической лебедки распределенного термопреобразователя, а также образцового измерительного средства, измерении образцовым измерительным средством распределения температуры, определении поданным измерений значения средней образцовой температуры, определений средней температуры распределенного термопреобразователя в его...
Зонд для виміру параметрів морської води під час руху судна
Номер патенту: 14187
Опубліковано: 25.04.1997
Автори: Шаповалов Юрій Іванович, Холкін Володимир Васильович, Прохоренко Валерія Василівна, Греков Микола Олександрович, Дикман Володимир Захарович
МПК: B63B 21/56
Мітки: параметрів, руху, води, морської, судна, зонд, виміру
Формула / Реферат:
1. Зонд для измерения параметров морской воды на ходу судна, содержащий герметичный аппаратурный контейнер с крышками, на нижнем торце которого размещены измерительные датчики, а также балласт, выполненный в виде рубашки каплевидной формы, охватывающий герметичный контейнер, и узел силового крепления и ввода конца кабель-троса, расположенный в верхней части балласта, отличающийся тем, что, с целью расширения эксплуатационных возможностей...
Спосіб підйому затопленого судна
Номер патенту: 58089
Опубліковано: 15.07.2003
Автори: Єгоров Анатолій Іванович, Якубець Юлія Анатольйовна, ЄГОРОВ РУДОЛЬФ АНАТОЛЬЙОВИЧ, Білявський Анатолій Федорович
МПК: B63B 35/00
Мітки: судна, спосіб, затопленого, підйому
Формула / Реферат:
1. Спосіб підйому затопленого судна, що включає захоплення його тросами підйомних засобів рятувального судна, подачу усередину корпуса речовин які створюють виштовхуючу судно силу, який відрізняється тим, що усередину корпуса судна подають кріогенний хладагент, змінюють агрегатний стан води, заморожують і перетворюють її в чарунковий лід, нарощують його об’єм і створюють виштовхуючу судно силу, достатню для спливання судна на поверхню...
Попередній патент: Прилад для одночасного перетворення кола в криву 3-го та 4-го порядку
Наступний патент: Спосіб комбінованого вироблення теплової та електричної енергії
Випадковий патент: Спосіб одержання графіту, що термічно розширюється