Привід рукавичного автомата
Номер патенту: 102298
Опубліковано: 26.10.2015
Автори: Чабан Олексій Віталійович, Музичишин Сергій Володимирович, Піпа Борис Федорович



Формула / Реферат
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, який відрізняється тим, що додатково обладнаний пружною муфтою з пружними елементами, виконаними у вигляді плоских пластинчатих пружин з регульованою жорсткістю, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом, причому одні кінці плоских пластинчатих пружин закріплені на валу, а другі їх кінці встановлені з можливістю взаємодії з ведучим шківом.
Текст
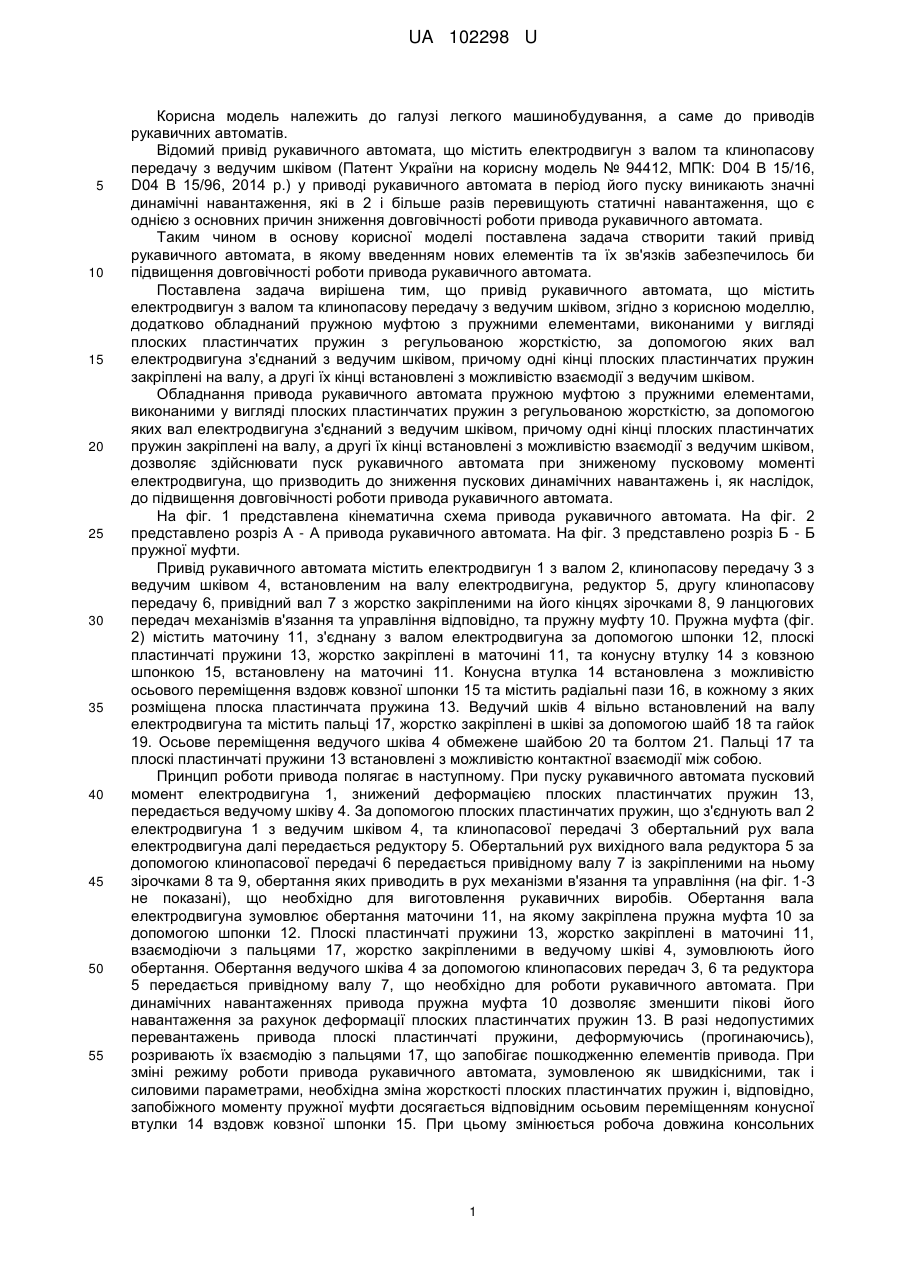
Реферат: Привід рукавичного автомата містить електродвигун з валом та клинопасову передачу з ведучим шківом. Він додатково обладнаний пружною муфтою з пружними елементами, виконаними у вигляді плоских пластинчатих пружин з регульованою жорсткістю, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом, причому одні кінці плоских пластинчатих пружин закріплені на валу, а другі їх кінці встановлені з можливістю взаємодії з ведучим шківом. UA 102298 U (54) ПРИВІД РУКАВИЧНОГО АВТОМАТА UA 102298 U UA 102298 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом (Патент України на корисну модель № 94412, МПК: D04 В 15/16, D04 В 15/96, 2014 р.) у приводі рукавичного автомата в період його пуску виникають значні динамічні навантаження, які в 2 і більше разів перевищують статичні навантаження, що є однією з основних причин зниження довговічності роботи привода рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків забезпечилось би підвищення довговічності роботи привода рукавичного автомата. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, згідно з корисною моделлю, додатково обладнаний пружною муфтою з пружними елементами, виконаними у вигляді плоских пластинчатих пружин з регульованою жорсткістю, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом, причому одні кінці плоских пластинчатих пружин закріплені на валу, а другі їх кінці встановлені з можливістю взаємодії з ведучим шківом. Обладнання привода рукавичного автомата пружною муфтою з пружними елементами, виконаними у вигляді плоских пластинчатих пружин з регульованою жорсткістю, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом, причому одні кінці плоских пластинчатих пружин закріплені на валу, а другі їх кінці встановлені з можливістю взаємодії з ведучим шківом, дозволяє здійснювати пуск рукавичного автомата при зниженому пусковому моменті електродвигуна, що призводить до зниження пускових динамічних навантажень і, як наслідок, до підвищення довговічності роботи привода рукавичного автомата. На фіг. 1 представлена кінематична схема привода рукавичного автомата. На фіг. 2 представлено розріз А - А привода рукавичного автомата. На фіг. 3 представлено розріз Б - Б пружної муфти. Привід рукавичного автомата містить електродвигун 1 з валом 2, клинопасову передачу 3 з ведучим шківом 4, встановленим на валу електродвигуна, редуктор 5, другу клинопасову передачу 6, привідний вал 7 з жорстко закріпленими на його кінцях зірочками 8, 9 ланцюгових передач механізмів в'язання та управління відповідно, та пружну муфту 10. Пружна муфта (фіг. 2) містить маточину 11, з'єднану з валом електродвигуна за допомогою шпонки 12, плоскі пластинчаті пружини 13, жорстко закріплені в маточині 11, та конусну втулку 14 з ковзною шпонкою 15, встановлену на маточині 11. Конусна втулка 14 встановлена з можливістю осьового переміщення вздовж ковзної шпонки 15 та містить радіальні пази 16, в кожному з яких розміщена плоска пластинчата пружина 13. Ведучий шків 4 вільно встановлений на валу електродвигуна та містить пальці 17, жорстко закріплені в шківі за допомогою шайб 18 та гайок 19. Осьове переміщення ведучого шківа 4 обмежене шайбою 20 та болтом 21. Пальці 17 та плоскі пластинчаті пружини 13 встановлені з можливістю контактної взаємодії між собою. Принцип роботи привода полягає в наступному. При пуску рукавичного автомата пусковий момент електродвигуна 1, знижений деформацією плоских пластинчатих пружин 13, передається ведучому шківу 4. За допомогою плоских пластинчатих пружин, що з'єднують вал 2 електродвигуна 1 з ведучим шківом 4, та клинопасової передачі 3 обертальний рух вала електродвигуна далі передається редуктору 5. Обертальний рух вихідного вала редуктора 5 за допомогою клинопасової передачі 6 передається привідному валу 7 із закріпленими на ньому зірочками 8 та 9, обертання яких приводить в рух механізми в'язання та управління (на фіг. 1-3 не показані), що необхідно для виготовлення рукавичних виробів. Обертання вала електродвигуна зумовлює обертання маточини 11, на якому закріплена пружна муфта 10 за допомогою шпонки 12. Плоскі пластинчаті пружини 13, жорстко закріплені в маточині 11, взаємодіючи з пальцями 17, жорстко закріпленими в ведучому шківі 4, зумовлюють його обертання. Обертання ведучого шківа 4 за допомогою клинопасових передач 3, 6 та редуктора 5 передається привідному валу 7, що необхідно для роботи рукавичного автомата. При динамічних навантаженнях привода пружна муфта 10 дозволяє зменшити пікові його навантаження за рахунок деформації плоских пластинчатих пружин 13. В разі недопустимих перевантажень привода плоскі пластинчаті пружини, деформуючись (прогинаючись), розривають їх взаємодію з пальцями 17, що запобігає пошкодженню елементів привода. При зміні режиму роботи привода рукавичного автомата, зумовленою як швидкісними, так і силовими параметрами, необхідна зміна жорсткості плоских пластинчатих пружин і, відповідно, запобіжного моменту пружної муфти досягається відповідним осьовим переміщенням конусної втулки 14 вздовж ковзної шпонки 15. При цьому змінюється робоча довжина консольних 1 UA 102298 U плоских пластинчатих пружин, тобто їх жорсткість і, відповідно, змінюється величина запобіжного моменту пружної муфти. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, який відрізняється тим, що додатково обладнаний пружною муфтою з пружними елементами, виконаними у вигляді плоских пластинчатих пружин з регульованою жорсткістю, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом, причому одні кінці плоских пластинчатих пружин закріплені на валу, а другі їх кінці встановлені з можливістю взаємодії з ведучим шківом. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of glove machine
Автори англійськоюChaban Oleksii Vitaliyovych, Muzychyshyn Sergii Volodymyrovych, Pipa Borys Fedorovych
Назва патенту російськоюПривод перчаточного автомата
Автори російськоюЧабан Алексей Витальевич, Музычишин Сергей Владимирович, Пипа Борис Федорович
МПК / Мітки
МПК: D04B 15/96, D04B 15/16
Мітки: автомата, привід, рукавичного
Код посилання
<a href="https://ua.patents.su/4-102298-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата

Номер патенту: 98327
Опубліковано: 27.04.2015
Автори: Піпа Борис Федорович, Павленко Георгій Іванович, Чабан Олексій Віталійович, Музичишин Сергій Володимирович
МПК: D04B 15/94, D04B 15/16
Мітки: автомата, привід, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, встановленим на валу електродвигуна, який відрізняється тим, що додатково оснащений демпфіруючим пристроєм з пружними елементами, виконаними у вигляді радіальних пакетів плоских пружин, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом.
Привід рукавичного автомата
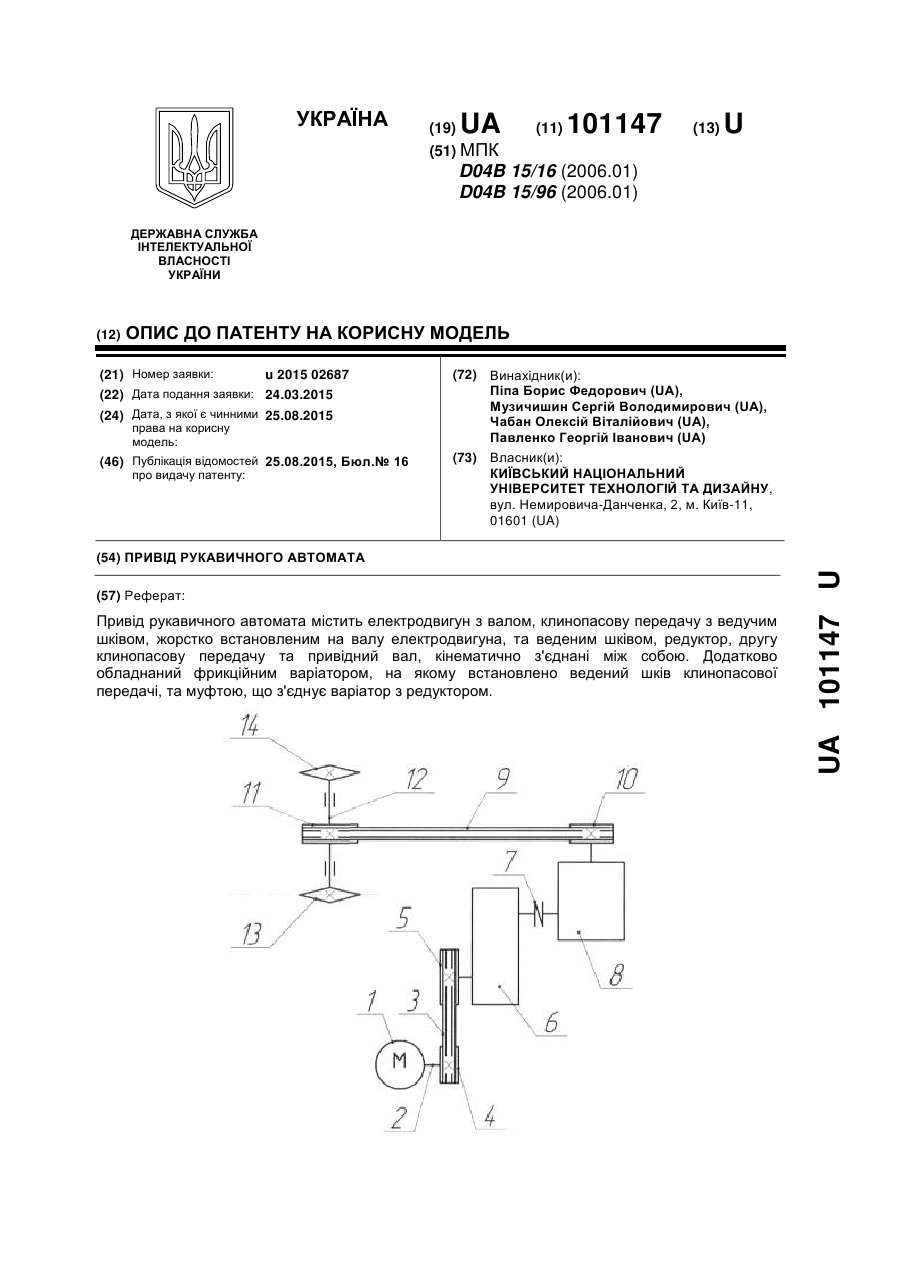
Номер патенту: 101147
Опубліковано: 25.08.2015
Автори: Чабан Олексій Віталійович, Музичишин Сергій Володимирович, Піпа Борис Федорович, Павленко Георгій Іванович
МПК: D04B 15/16, D04B 15/96
Мітки: автомата, рукавичного, привід
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом, клинопасову передачу з ведучим шківом, жорстко встановленим на валу електродвигуна, та веденим шківом, редуктор, другу клинопасову передачу та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний фрикційним варіатором, на якому встановлено ведений шків клинопасової передачі, та муфтою, що з'єднує варіатор з редуктором.
Привід рукавичного автомата
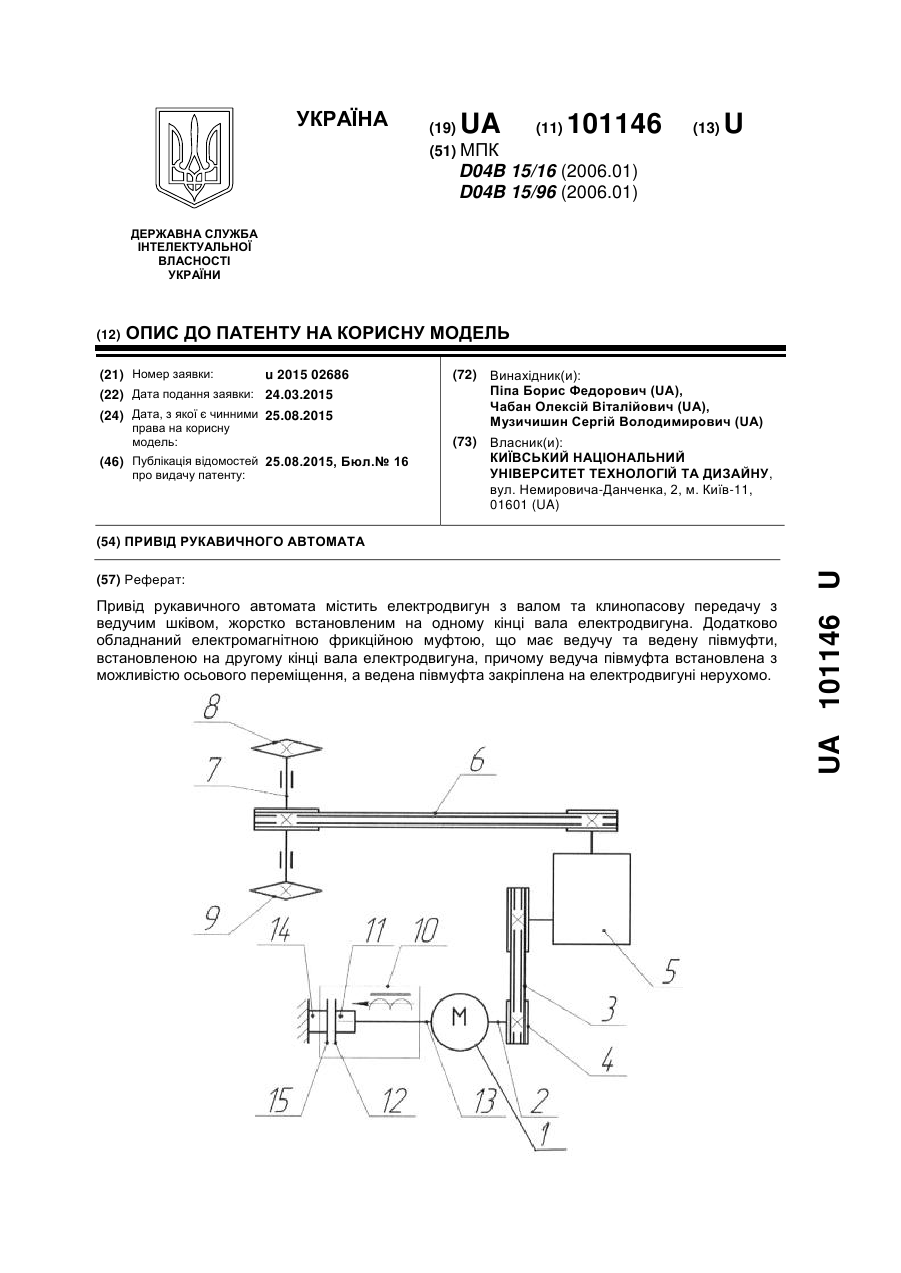
Номер патенту: 101146
Опубліковано: 25.08.2015
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович, Музичишин Сергій Володимирович
МПК: D04B 15/16, D04B 15/96
Мітки: автомата, привід, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом, та клинопасову передачу з ведучим шківом, жорстко встановленим на одному кінці вала електродвигуна, який відрізняється тим, що додатково обладнаний електромагнітною фрикційною муфтою, що має ведучу та ведену півмуфти, встановленою на другому кінці вала електродвигуна, причому ведуча півмуфта встановлена з можливістю осьового переміщення, а ведена півмуфта закріплена на...
Привід рукавичного автомата
Номер патенту: 93924
Опубліковано: 27.10.2014
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96, D04B 15/16
Мітки: привід, рукавичного, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом, дві клинопасові передачі, редуктор та приводний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково оснащений електромагнітною фрикційною муфтою, що містить ведучу півмуфту, встановлену на валу електродвигуна з можливістю осьового переміщення, та ведену півмуфту, жорстко з'єднану з ведучим шківом клинопасової передачі, та електромагнітом, що містить обмотку...
Привід рукавичного автомата

Номер патенту: 102273
Опубліковано: 26.10.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/96, D04B 15/16, D04B 35/18
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, приводний вал та другу клинопасову передачу з веденим шківом, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний запобіжною муфтою з двома півмуфтами та елементом, що руйнується, встановленою на вертикальному приводному валу, причому одна півмуфта жорстко закріплена на приводному валу, друга півмуфта жорстко з'єднана з веденим...
Попередній патент: Пристрій для екстрагування рослинної сировини
Наступний патент: Привід круглов’язальної машини
Випадковий патент: Пристрій для регулювання параметрів двох потоків рідинних речовин (варіанти)