Пристрій для автоматичного розвантаження важких фракцій з відсадної машини
Номер патенту: 10855
Опубліковано: 25.12.1996
Формула / Реферат
1.Устройство для автоматической разгрузки тяжелых фракций из отсадочной машины, включающее поплавковый датчик, механически связанный с сельсинным преобразователем, выход которого соединен со входом детектора, подключенного к измерительному блоку, компаратор, первым входом подключенный к задатчику, вторым входом - к выходу измерительного блока, а выходом - к прямому входу первого сумматора, выход которого через буферный каскад соединен с управляющим входом преобразователя частоты, соединенного с электродвигателем, механически связанным с роторным разгрузчиком, и указатель частоты вращения, отличающееся тем, что оно дополнительно содержит блок контроля скорости электродвигателя, выход которого подключен к инверсному входу первого сумматора, указанный блок контроля скорости включает датчик тока, соединенный с электродвигателем, преобразователь ток-напряжение, второй сумматор, первый, второй и третий делители напряжения, датчик тока подключен к преобразователю ток-напряжение, второй сумматор своим выходом подключен к указателю частоты вращения и через первый делитель напряжения - к инверсному входу первого сумматора, прямым входом - через второй делитель напряжения к выходу первого сумматора, а инверсным входом - через третий делитель напряжения к выходу преобразователя ток-напряжение.
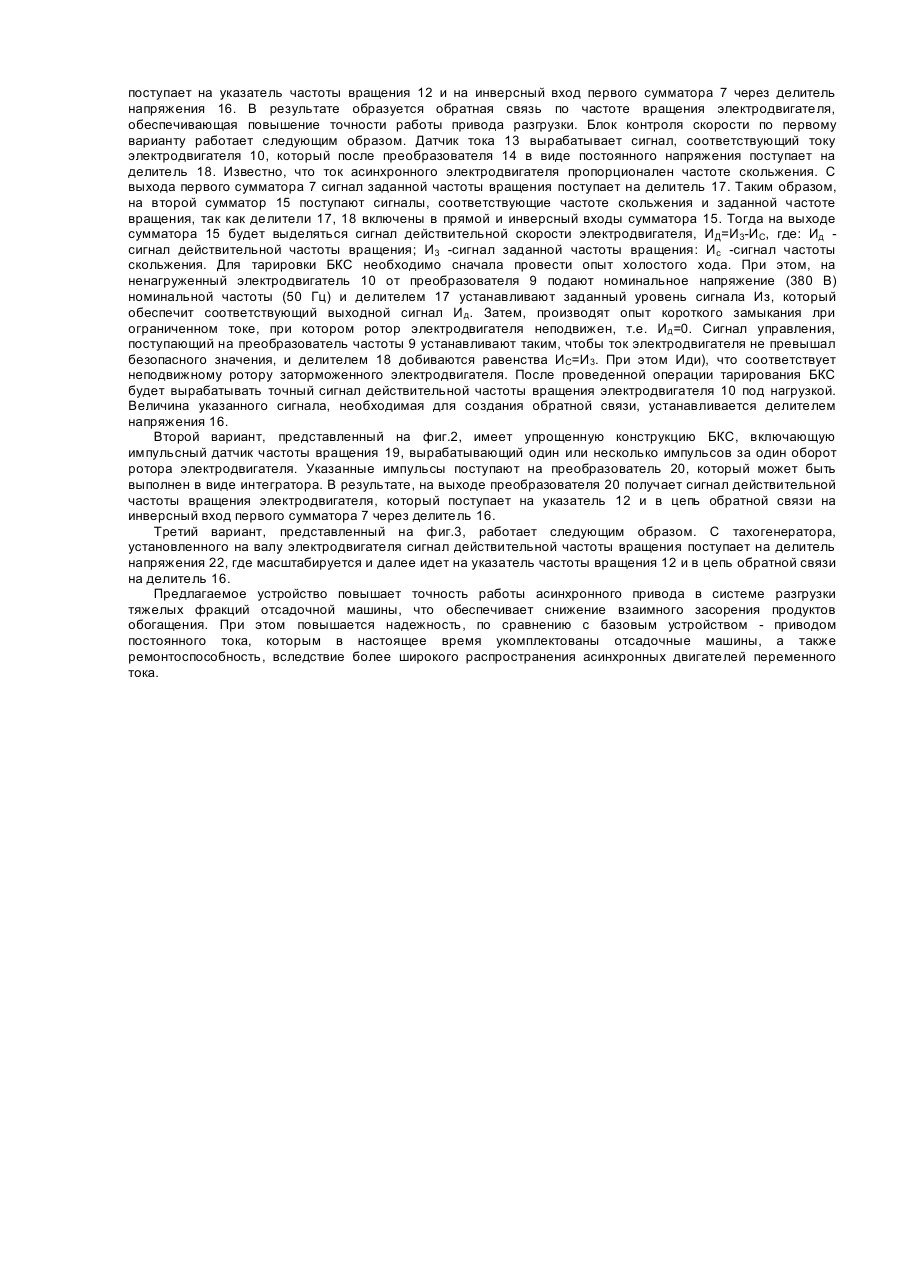
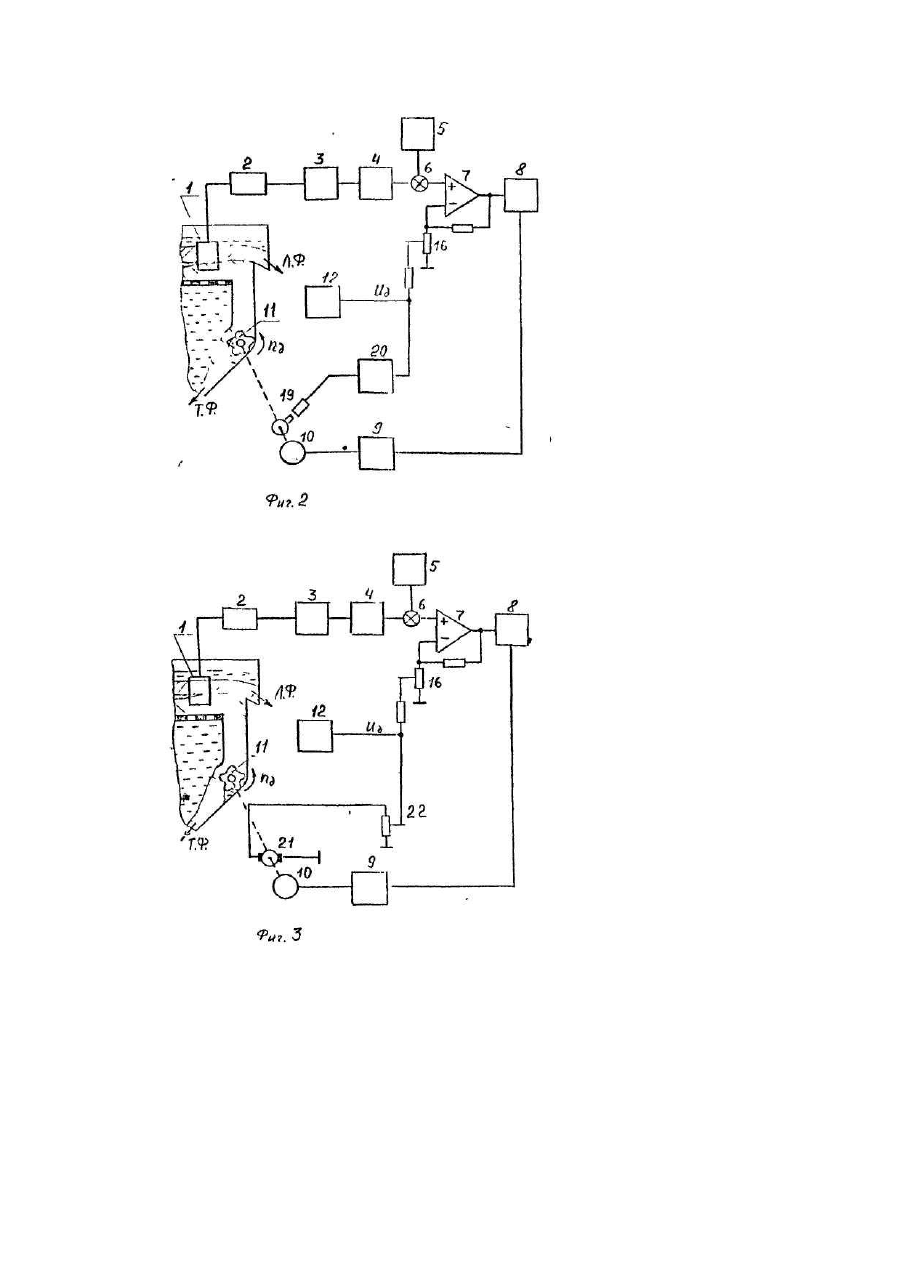
2.Устройство по п.1, отличающееся тем, что блок контроля скорости включает импульсный датчик частоты вращения, подключенный ко входу преобразователя частота-напряжение, выход которого через первый делитель напряжения подключен к инверсному входу первого сумматора.
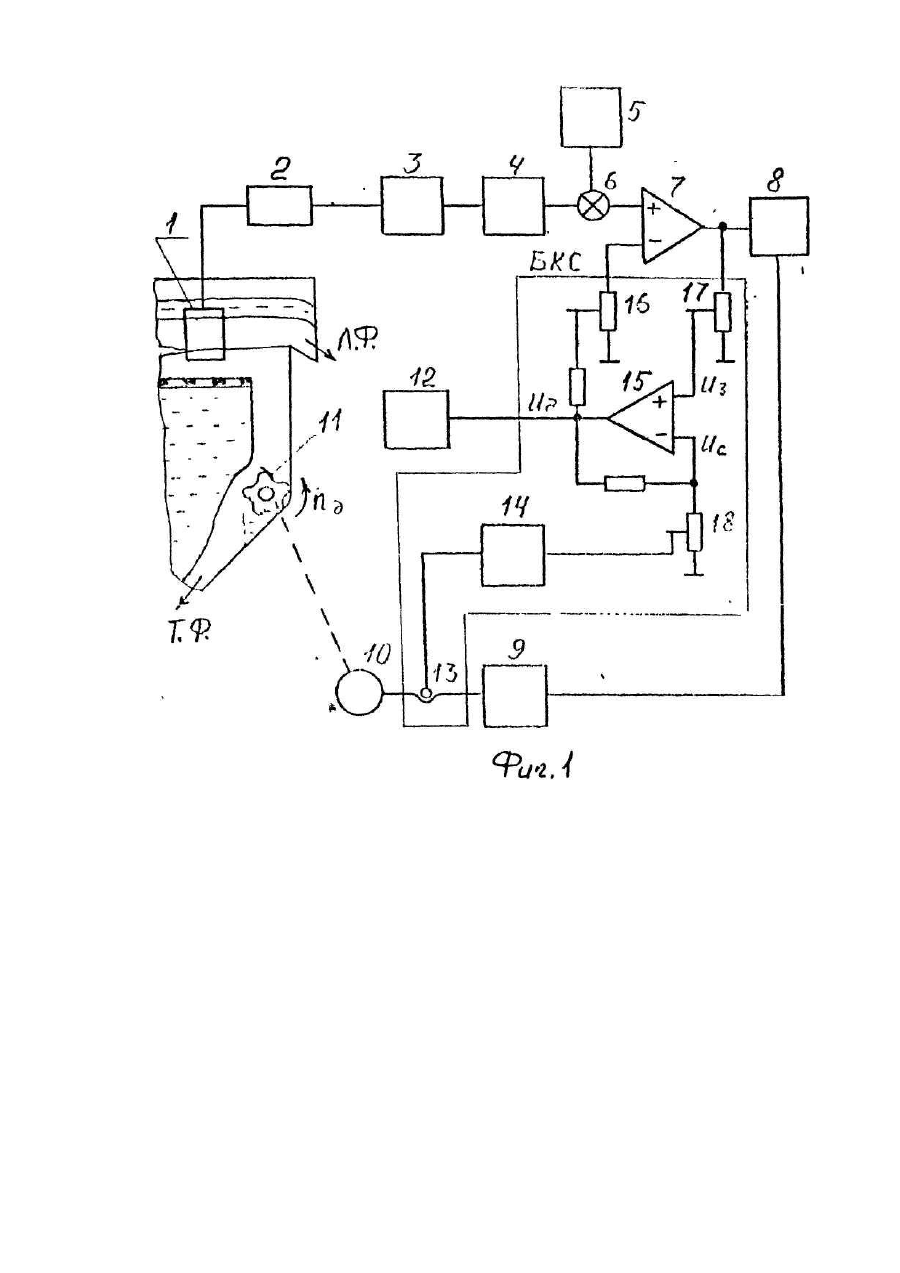
3.Устройство по п.1, отличающееся тем, что блок контроля скорости включает тахогенератор, подключенный через четвертый делитель напряжения к инверсному входу первого сумматора.
Текст
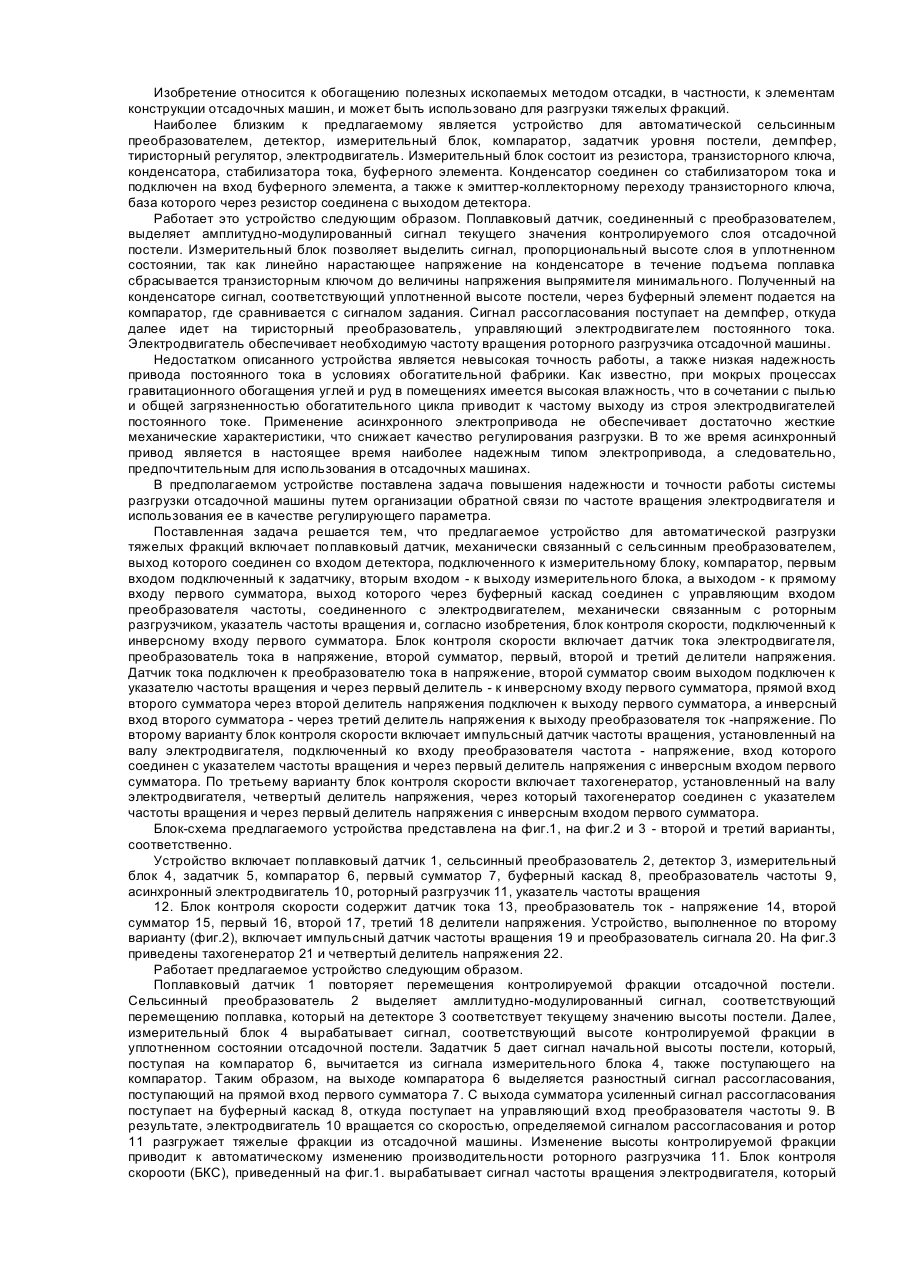
Изобретение относится к обогащению полезных ископаемых методом отсадки, в частности, к элементам конструкции отсадочных машин, и может быть использовано для разгрузки тяжелых фракций. Наиболее близким к предлагаемому является устройство для автоматической сельсинным преобразователем, детектор, измерительный блок, компаратор, задатчик уровня постели, демпфер, тиристорный регулятор, электродвигатель. Измерительный блок состоит из резистора, транзисторного ключа, конденсатора, стабилизатора тока, буферного элемента. Конденсатор соединен со стабилизатором тока и подключен на вход буферного элемента, а также к эмиттер-коллекторному переходу транзисторного ключа, база которого через резистор соединена с выходом детектора. Работает это устройство следующим образом. Поплавковый датчик, соединенный с преобразователем, выделяет амплитудно-модулированный сигнал текущего значения контролируемого слоя отсадочной постели. Измерительный блок позволяет выделить сигнал, пропорциональный высоте слоя в уплотненном состоянии, так как линейно нарастающее напряжение на конденсаторе в течение подъема поплавка сбрасывается транзисторным ключом до величины напряжения выпрямителя минимального. Полученный на конденсаторе сигнал, соответствующий уплотненной высоте постели, через буферный элемент подается на компаратор, где сравнивается с сигналом задания. Сигнал рассогласования поступает на демпфер, откуда далее идет на тиристорный преобразователь, управляющий электродвигателем постоянного тока. Электродвигатель обеспечивает необходимую частоту вращения роторного разгрузчика отсадочной машины. Недостатком описанного устройства является невысокая точность работы, а также низкая надежность привода постоянного тока в условиях обогатительной фабрики. Как известно, при мокрых процессах гравитационного обогащения углей и руд в помещениях имеется высокая влажность, что в сочетании с пылью и общей загрязненностью обогатительного цикла приводит к частому выходу из строя электродвигателей постоянного токе. Применение асинхронного электропривода не обеспечивает достаточно жесткие механические характеристики, что снижает качество регулирования разгрузки. В то же время асинхронный привод является в настоящее время наиболее надежным типом электропривода, а следовательно, предпочтительным для использования в отсадочных машинах. В предполагаемом устройстве поставлена задача повышения надежности и точности работы системы разгрузки отсадочной машины путем организации обратной связи по частоте вращения электродвигателя и использования ее в качестве регулирующего параметра. Поставленная задача решается тем, что предлагаемое устройство для автоматической разгрузки тяжелых фракций включает поплавковый датчик, механически связанный с сельсинным преобразователем, выход которого соединен со входом детектора, подключенного к измерительному блоку, компаратор, первым входом подключенный к задатчику, вторым входом - к выходу измерительного блока, а выходом - к прямому входу первого сумматора, выход которого через буферный каскад соединен с управляющим входом преобразователя частоты, соединенного с электродвигателем, механически связанным с роторным разгрузчиком, указатель частоты вращения и, согласно изобретения, блок контроля скорости, подключенный к инверсному входу первого сумматора. Блок контроля скорости включает датчик тока электродвигателя, преобразователь тока в напряжение, второй сумматор, первый, второй и третий делители напряжения. Датчик тока подключен к преобразователю тока в напряжение, второй сумматор своим выходом подключен к указателю частоты вращения и через первый делитель - к инверсному входу первого сумматора, прямой вход второго сумматора через второй делитель напряжения подключен к выходу первого сумматора, а инверсный вход второго сумматора - через третий делитель напряжения к выходу преобразователя ток -напряжение. По второму варианту блок контроля скорости включает импульсный датчик частоты вращения, установленный на валу электродвигателя, подключенный ко входу преобразователя частота - напряжение, вход которого соединен с указателем частоты вращения и через первый делитель напряжения с инверсным входом первого сумматора. По третьему варианту блок контроля скорости включает тахогенератор, установленный на валу электродвигателя, четвертый делитель напряжения, через который тахогенератор соединен с указателем частоты вращения и через первый делитель напряжения с инверсным входом первого сумматора. Блок-схема предлагаемого устройства представлена на фиг.1, на фиг.2 и 3 - второй и третий варианты, соответственно. Устройство включает поплавковый датчик 1, сельсинный преобразователь 2, детектор 3, измерительный блок 4, задатчик 5, компаратор 6, первый сумматор 7, буферный каскад 8, преобразователь частоты 9, асинхронный электродвигатель 10, роторный разгрузчик 11, указатель частоты вращения 12. Блок контроля скорости содержит датчик тока 13, преобразователь ток - напряжение 14, второй сумматор 15, первый 16, второй 17, третий 18 делители напряжения. Устройство, выполненное по второму варианту (фиг.2), включает импульсный датчик частоты вращения 19 и преобразователь сигнала 20. На фиг.3 приведены тахогенератор 21 и четвертый делитель напряжения 22. Работает предлагаемое устройство следующим образом. Поплавковый датчик 1 повторяет перемещения контролируемой фракции отсадочной постели. Сельсинный преобразователь 2 выделяет амллитудно-модулированный сигнал, соответствующий перемещению поплавка, который на детекторе 3 соответствует текущему значению высоты постели. Далее, измерительный блок 4 вырабатывает сигнал, соответствующий высоте контролируемой фракции в уплотненном состоянии отсадочной постели. Задатчик 5 дает сигнал начальной высоты постели, который, поступая на компаратор 6, вычитается из сигнала измерительного блока 4, также поступающего на компаратор. Таким образом, на выходе компаратора 6 выделяется разностный сигнал рассогласования, поступающий на прямой вход первого сумматора 7. С выхода сумматора усиленный сигнал рассогласования поступает на буферный каскад 8, откуда поступает на управляющий вход преобразователя частоты 9. В результате, электродвигатель 10 вращается со скоростью, определяемой сигналом рассогласования и ротор 11 разгружает тяжелые фракции из отсадочной машины. Изменение высоты контролируемой фракции приводит к автоматическому изменению производительности роторного разгрузчика 11. Блок контроля скорооти (БКС), приведенный на фиг.1. вырабатывает сигнал частоты вращения электродвигателя, который поступает на указатель частоты вращения 12 и на инверсный вход первого сумматора 7 через делитель напряжения 16. В результате образуется обратная связь по частоте вращения электродвигателя, обеспечивающая повышение точности работы привода разгрузки. Блок контроля скорости по первому варианту работает следующим образом. Датчик тока 13 вырабатывает сигнал, соответствующий току электродвигателя 10, который после преобразователя 14 в виде постоянного напряжения поступает на делитель 18. Известно, что ток асинхронного электродвигателя пропорционален частоте скольжения. С выхода первого сумматора 7 сигнал заданной частоты вращения поступает на делитель 17. Таким образом, на второй сумматор 15 поступают сигналы, соответствующие частоте скольжения и заданной частоте вращения, так как делители 17, 18 включены в прямой и инверсный входы сумматора 15. Тогда на выходе сумматора 15 будет выделяться сигнал действительной скорости электродвигателя, ИД= И3-ИС, где: Ид сигнал действительной частоты вращения; И3 -сигнал заданной частоты вращения: Ис -сигнал частоты скольжения. Для тарировки БКС необходимо сначала провести опыт холостого хода. При этом, на ненагруженный электродвигатель 10 от преобразователя 9 подают номинальное напряжение (380 В) номинальной частоты (50 Гц) и делителем 17 устанавливают заданный уровень сигнала Из, который обеспечит соответствующий выходной сигнал Ид. Затем, производят опыт короткого замыкания лри ограниченном токе, при котором ротор электродвигателя неподвижен, т.е. Ид=0. Сигнал управления, поступающий на преобразователь частоты 9 устанавливают таким, чтобы ток электродвигателя не превышал безопасного значения, и делителем 18 добиваются равенства ИС= И3. При этом Иди), что соответствует неподвижному ротору заторможенного электродвигателя. После проведенной операции тарирования БКС будет вырабатывать точный сигнал действительной частоты вращения электродвигателя 10 под нагрузкой. Величина указанного сигнала, необходимая для создания обратной связи, устанавливается делителем напряжения 16. Второй вариант, представленный на фиг.2, имеет упрощенную конструкцию БКС, включающую импульсный датчик частоты вращения 19, вырабатывающий один или несколько импульсов за один оборот ротора электродвигателя. Указанные импульсы поступают на преобразователь 20, который может быть выполнен в виде интегратора. В результате, на выходе преобразователя 20 получает сигнал действительной частоты вращения электродвигателя, который поступает на указатель 12 и в цепь обратной связи на инверсный вход первого сумматора 7 через делитель 16. Третий вариант, представленный на фиг.3, работает следующим образом. С тахогенератора, установленного на валу электродвигателя сигнал действительной частоты вращения поступает на делитель напряжения 22, где масштабируется и далее идет на указатель частоты вращения 12 и в цепь обратной связи на делитель 16. Предлагаемое устройство повышает точность работы асинхронного привода в системе разгрузки тяжелых фракций отсадочной машины, что обеспечивает снижение взаимного засорения продуктов обогащения. При этом повышается надежность, по сравнению с базовым устройством - приводом постоянного тока, которым в настоящее время укомплектованы отсадочные машины, а также ремонтоспособность, вследствие более широкого распространения асинхронных двигателей переменного тока.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatic unloading of heavy fractions from jig
Автори англійськоюChalenko Oleksandr Yurievych, Sbitnev Mykhailo Pavlovych
Назва патенту російськоюУстройство для автоматической разгрузки тяжелых фракций из отсадочной машины
Автори російськоюЧаленко Александр Юрьевич, Сбитнев Михаил Павлович
МПК / Мітки
МПК: B03B 13/00
Мітки: фракцій, пристрій, важких, автоматичного, розвантаження, машини, відсадної
Код посилання
<a href="https://ua.patents.su/4-10855-pristrijj-dlya-avtomatichnogo-rozvantazhennya-vazhkikh-frakcijj-z-vidsadno-mashini.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного розвантаження важких фракцій з відсадної машини</a>
Пристрій автоматичного управління виїмкової машини
Номер патенту: 7573
Опубліковано: 29.09.1995
Автори: Поволоцький Сергій Олександрович, Сілаєв Віктор Іванович, Сірченко Володимир Миколаєвич, Жданов Костянтин Федорович
МПК: E21C 35/24
Мітки: автоматичного, управління, машини, пристрій, виїмкової
Формула / Реферат:
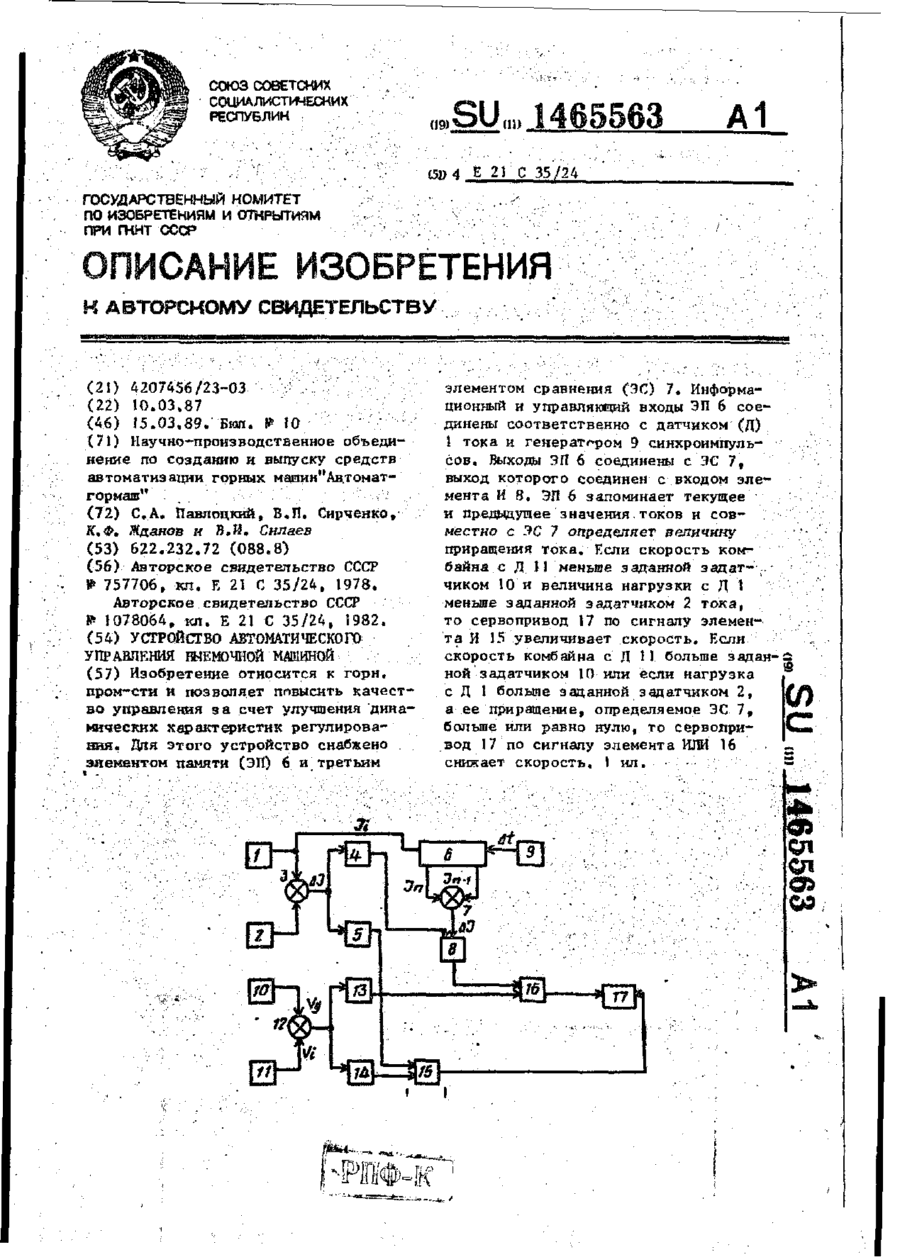
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик тока, соединенные с первым элементом сравнения, выход которого через первый и второй пороговые элементы соединен с первыми входами соответственно первого и второго элементов И, датчик и задатчик скорости, соединенные с вторым элементом сравнения, выход которого через третий и четвертый пороговые элементы соединен соответственно с вторым входом второго...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Монаєв Віктор Іванович, Бардамід Василь Іванович
МПК: H02H 7/093
Мітки: пристрій, постійного, обертання, допустимої, захисту, частоти, електродвигуна, перевищення, струму
Формула / Реферат:
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
Пристрій автоматичного початкового збудження електричної машини змінного струму
Номер патенту: 6813
Опубліковано: 29.12.1994
Автори: Радченко Віталій Васильович, Хруслов Лєв Лєонтьєвіч, Сітніков Владімір Фьодоровіч
МПК: H02P 9/14
Мітки: пристрій, початкового, збудження, електричної, автоматичного, змінного, машини, струму
Формула / Реферат:
(57) Устройство автоматического начального возбуждения электрической машины переменного тока, содержащее первый и второй выводы для подключения к фазной обмотке электрической машины, второй и третий выводы для подключения обмотки возбуждения электрической машины переменного тока, основной тиристор, дроссель насыщения, первым выводом подключенный к аноду первого разделительного диода, вторым выводом дроссель насыщения подсоединенк первому...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 345
Опубліковано: 30.04.1993
Автори: Маркевич Анатолій Васильович, Морозов Микола Ібрагимович, Метельов Леонід Дмитрович, Квашин Михайло Федорович, Цибулько Вадим Йосипович
МПК: F01D 21/00
Мітки: ротора, турбомашині, осі, пристрій, контролю, максимального, відхілення
Формула / Реферат:
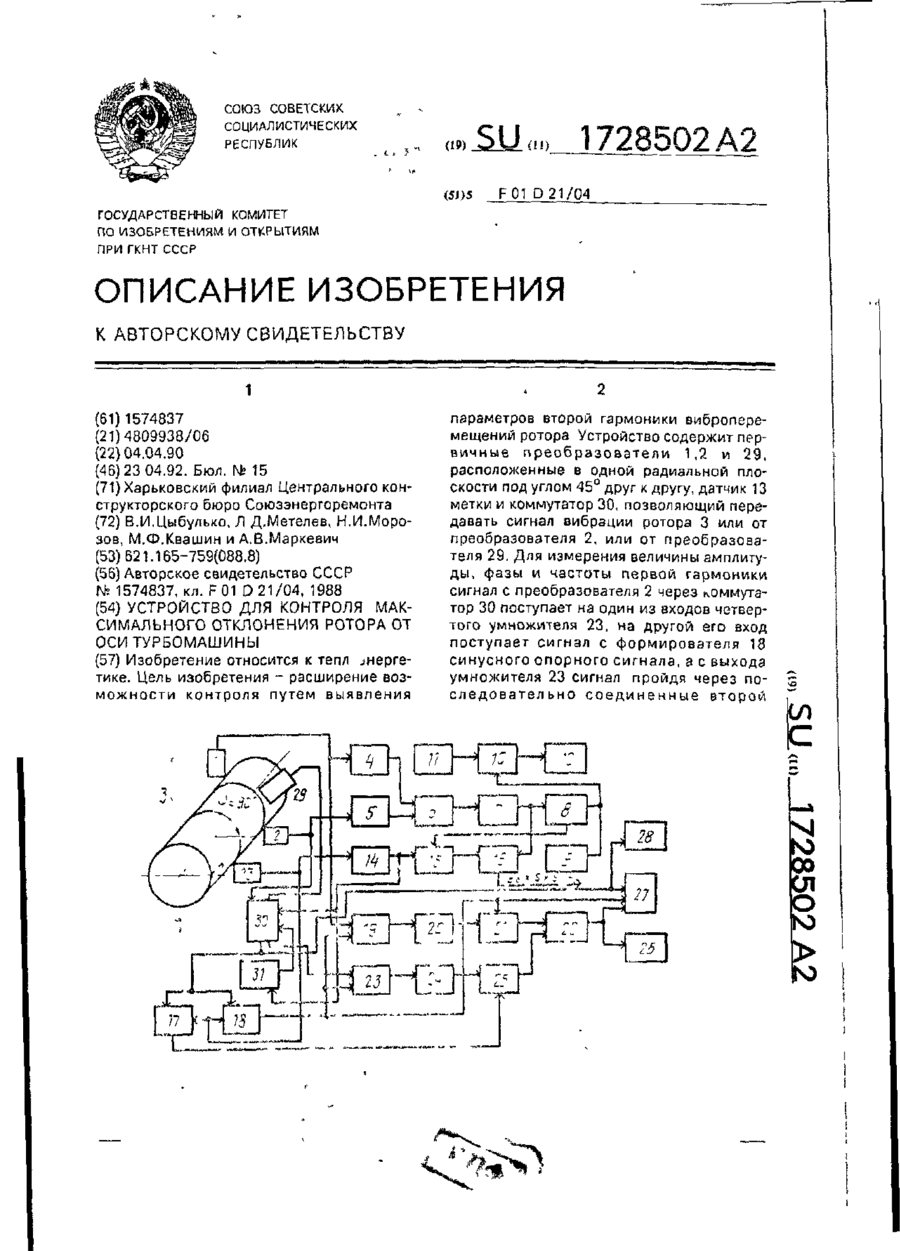
Формула изобретенияУстройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1574837, отличающееся тем, что, с целью расширения возможностей контроля путем выявления параметров второй гармоники вибросмещений ротора, оно снабжено третьим первичным преобразователем, вторым умножителем частоты и коммутатором, причем третий первичный преобразователь установлен вблизи ротора в плоскости установки первого и...
Пристрій для замірювання температури
Номер патенту: 1695
Опубліковано: 25.10.1994
Автори: Стогов Володимир Олександрович, Ятцелєв Леонід Вікторович
МПК: G01K 7/14
Мітки: температури, замірювання, пристрій
Формула / Реферат:
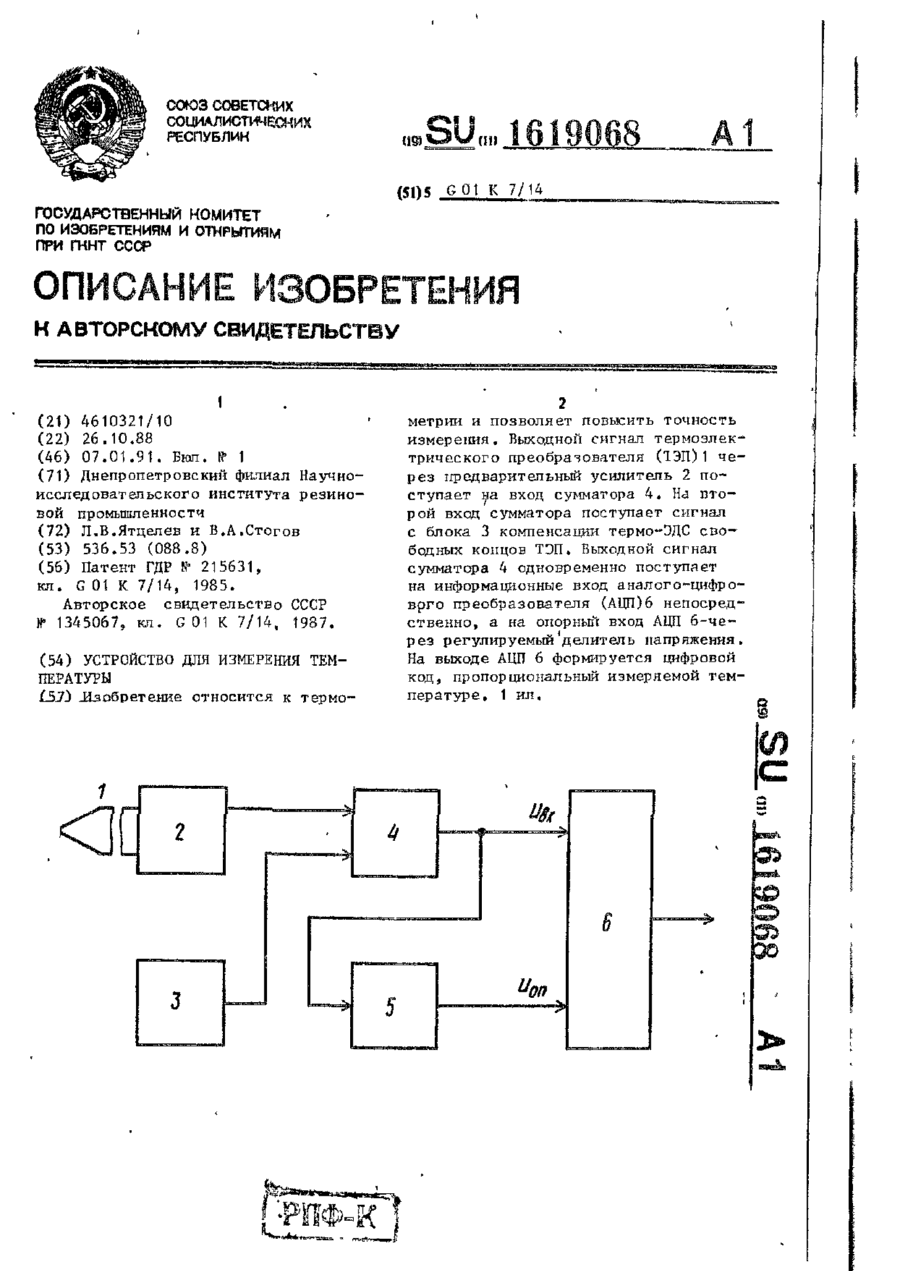
Устройство для измерения температуры, содержащее термоэлектрический преобразователь, подключенный первым выводом к первому входу предварительного усилителя, блок компенсации термо-ЭДС свободных концов термоэлектрического преобразователя, сумматор, первый вход которого подключен к выходу предварительного усилителя, и регулируемый делитель напряжения, отличающееся тем, что, с целью повышения точности измерения, в него введен...
Попередній патент: Спосіб одержання термостабілізатора полівінілхлориду
Наступний патент: Екранований кабель
Випадковий патент: Антагоністи ванілоїдного рецептора підтипу 1 (vr1) і їх застосування