Система управління колесами ведучого моста при динамічному способі управління транспортним засобом
Номер патенту: 110465
Опубліковано: 10.10.2016
Автори: Дунь Сергій Вікторович, Кайдалов Руслан Олегович, Подригало Михайло Абович, Нікорчук Андрій Іванович, Шаповал Віталій Володимирович

Формула / Реферат
Система управління колесами ведучого моста при динамічному способі управління транспортним засобом, яка містить джерело тиску робочого тіла, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між джерелом тиску та гальмівними камерами коліс, яка відрізняється тим, що вона додатково має планетарні механізми правого і лівого бортів, а крани управління гальмами лівого і правого бортів виконані у вигляді електропневматичних клапанів.
Текст
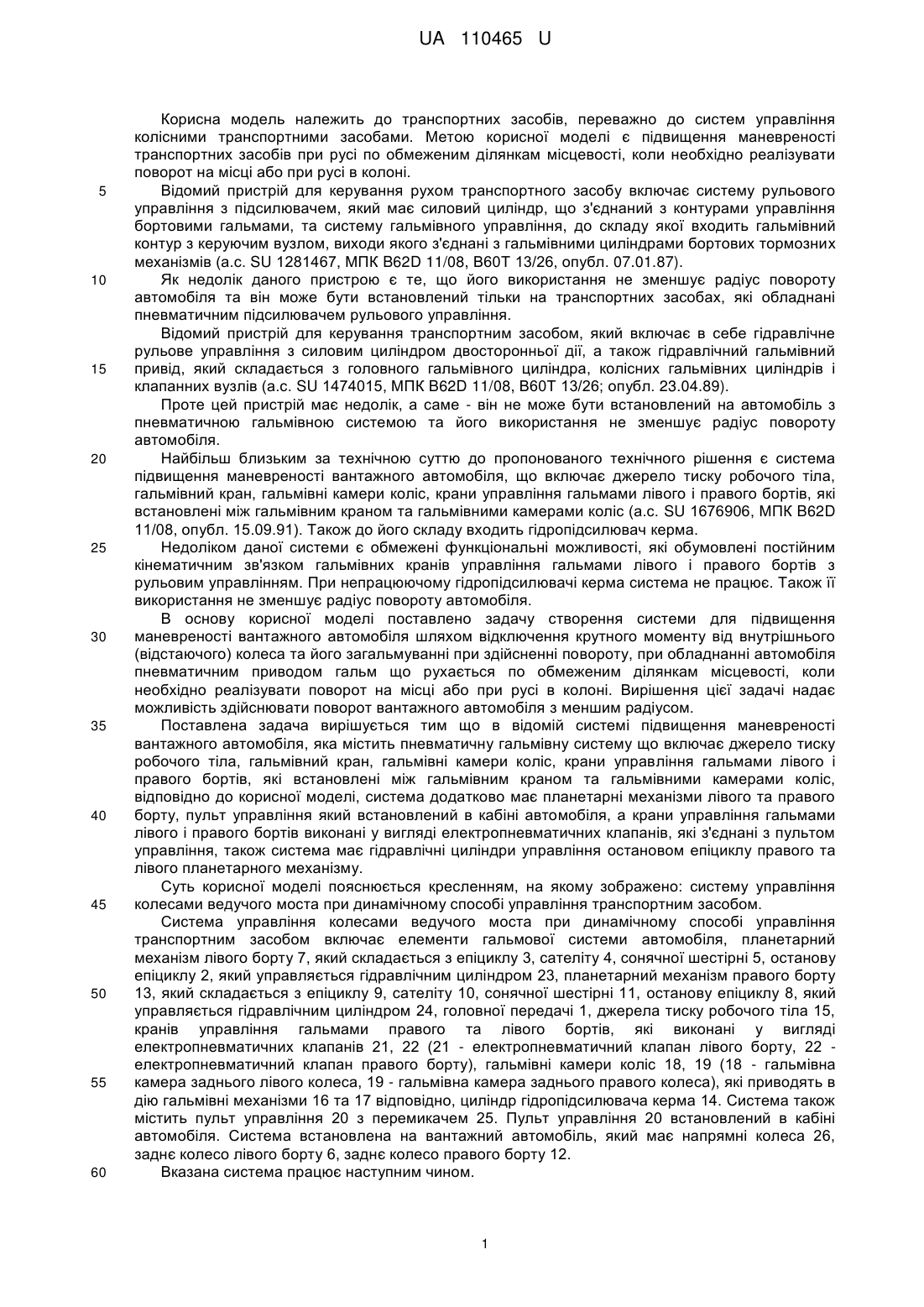
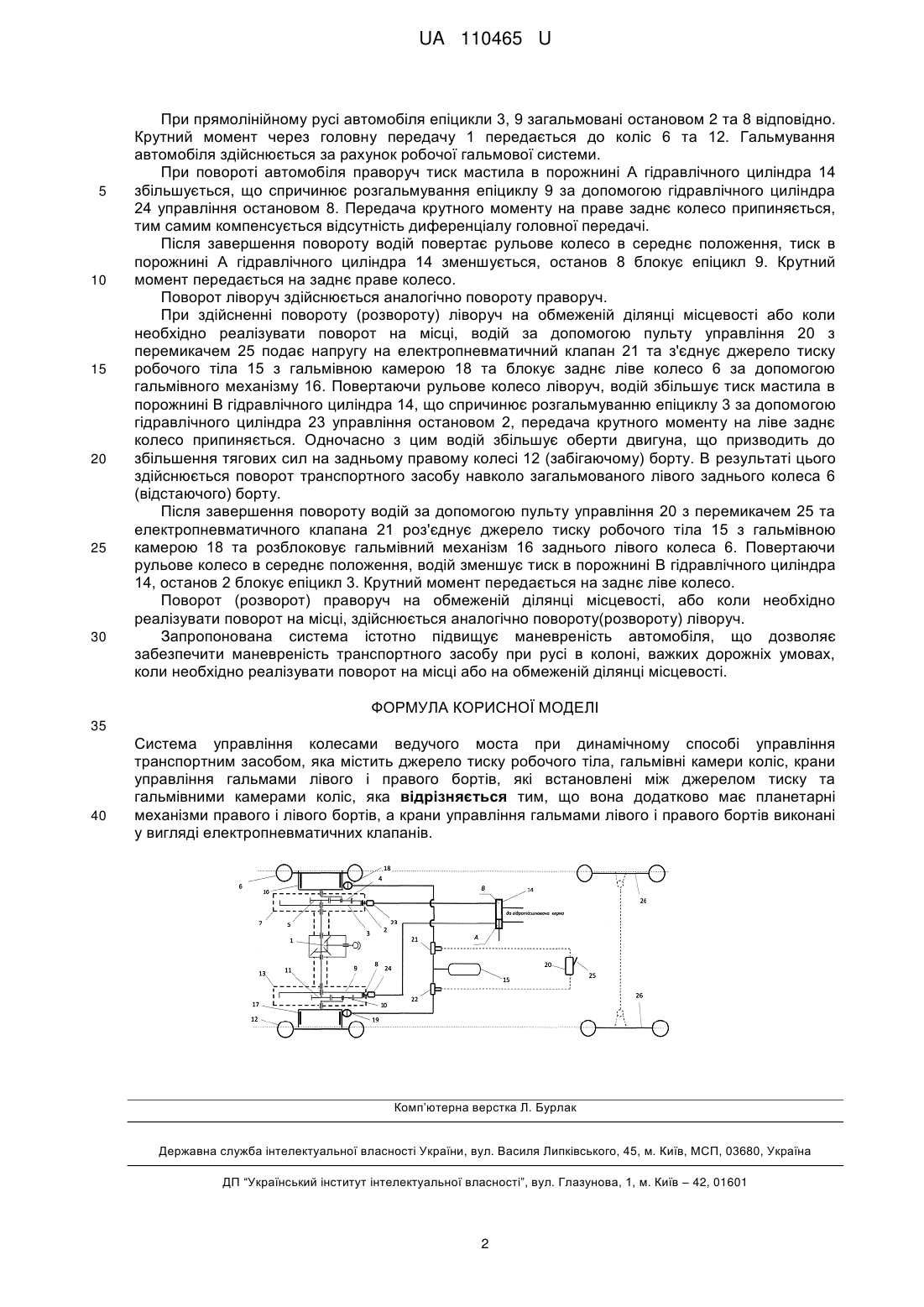
Реферат: Система управління колесами ведучого моста при динамічному способі управління транспортним засобом містить джерело тиску робочого тіла, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між джерелом тиску та гальмівними камерами коліс. Система додатково має планетарні механізми правого і лівого бортів, а крани управління гальмами лівого і правого бортів виконані у вигляді електропневматичних клапанів. UA 110465 U (12) UA 110465 U UA 110465 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до транспортних засобів, переважно до систем управління колісними транспортними засобами. Метою корисної моделі є підвищення маневреності транспортних засобів при русі по обмеженим ділянкам місцевості, коли необхідно реалізувати поворот на місці або при русі в колоні. Відомий пристрій для керування рухом транспортного засобу включає систему рульового управління з підсилювачем, який має силовий циліндр, що з'єднаний з контурами управління бортовими гальмами, та систему гальмівного управління, до складу якої входить гальмівний контур з керуючим вузлом, виходи якого з'єднані з гальмівними циліндрами бортових тормозних механізмів (а.с. SU 1281467, МПК B62D 11/08, В60Т 13/26, опубл. 07.01.87). Як недолік даного пристрою є те, що його використання не зменшує радіус повороту автомобіля та він може бути встановлений тільки на транспортних засобах, які обладнані пневматичним підсилювачем рульового управління. Відомий пристрій для керування транспортним засобом, який включає в себе гідравлічне рульове управління з силовим циліндром двосторонньої дії, а також гідравлічний гальмівний привід, який складається з головного гальмівного циліндра, колісних гальмівних циліндрів і клапанних вузлів (а.с. SU 1474015, МПК B62D 11/08, В60Т 13/26; опубл. 23.04.89). Проте цей пристрій має недолік, а саме - він не може бути встановлений на автомобіль з пневматичною гальмівною системою та його використання не зменшує радіус повороту автомобіля. Найбільш близьким за технічною суттю до пропонованого технічного рішення є система підвищення маневреності вантажного автомобіля, що включає джерело тиску робочого тіла, гальмівний кран, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між гальмівним краном та гальмівними камерами коліс (а.с. SU 1676906, МПК B62D 11/08, опубл. 15.09.91). Також до його складу входить гідропідсилювач керма. Недоліком даної системи є обмежені функціональні можливості, які обумовлені постійним кінематичним зв'язком гальмівних кранів управління гальмами лівого і правого бортів з рульовим управлінням. При непрацюючому гідропідсилювачі керма система не працює. Також її використання не зменшує радіус повороту автомобіля. В основу корисної моделі поставлено задачу створення системи для підвищення маневреності вантажного автомобіля шляхом відключення крутного моменту від внутрішнього (відстаючого) колеса та його загальмуванні при здійсненні повороту, при обладнанні автомобіля пневматичним приводом гальм що рухається по обмеженим ділянкам місцевості, коли необхідно реалізувати поворот на місці або при русі в колоні. Вирішення цієї задачі надає можливість здійснювати поворот вантажного автомобіля з меншим радіусом. Поставлена задача вирішується тим що в відомій системі підвищення маневреності вантажного автомобіля, яка містить пневматичну гальмівну систему що включає джерело тиску робочого тіла, гальмівний кран, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між гальмівним краном та гальмівними камерами коліс, відповідно до корисної моделі, система додатково має планетарні механізми лівого та правого борту, пульт управління який встановлений в кабіні автомобіля, а крани управління гальмами лівого і правого бортів виконані у вигляді електропневматичних клапанів, які з'єднані з пультом управління, також система має гідравлічні циліндри управління остановом епіциклу правого та лівого планетарного механізму. Суть корисної моделі пояснюється кресленням, на якому зображено: систему управління колесами ведучого моста при динамічному способі управління транспортним засобом. Система управління колесами ведучого моста при динамічному способі управління транспортним засобом включає елементи гальмової системи автомобіля, планетарний механізм лівого борту 7, який складається з епіциклу 3, сателіту 4, сонячної шестірні 5, останову епіциклу 2, який управляється гідравлічним циліндром 23, планетарний механізм правого борту 13, який складається з епіциклу 9, сателіту 10, сонячної шестірні 11, останову епіциклу 8, який управляється гідравлічним циліндром 24, головної передачі 1, джерела тиску робочого тіла 15, кранів управління гальмами правого та лівого бортів, які виконані у вигляді електропневматичних клапанів 21, 22 (21 - електропневматичний клапан лівого борту, 22 електропневматичний клапан правого борту), гальмівні камери коліс 18, 19 (18 - гальмівна камера заднього лівого колеса, 19 - гальмівна камера заднього правого колеса), які приводять в дію гальмівні механізми 16 та 17 відповідно, циліндр гідропідсилювача керма 14. Система також містить пульт управління 20 з перемикачем 25. Пульт управління 20 встановлений в кабіні автомобіля. Система встановлена на вантажний автомобіль, який має напрямні колеса 26, заднє колесо лівого борту 6, заднє колесо правого борту 12. Вказана система працює наступним чином. 1 UA 110465 U 5 10 15 20 25 30 При прямолінійному русі автомобіля епіцикли 3, 9 загальмовані остановом 2 та 8 відповідно. Крутний момент через головну передачу 1 передається до коліс 6 та 12. Гальмування автомобіля здійснюється за рахунок робочої гальмової системи. При повороті автомобіля праворуч тиск мастила в порожнині А гідравлічного циліндра 14 збільшується, що спричинює розгальмування епіциклу 9 за допомогою гідравлічного циліндра 24 управління остановом 8. Передача крутного моменту на праве заднє колесо припиняється, тим самим компенсується відсутність диференціалу головної передачі. Після завершення повороту водій повертає рульове колесо в середнє положення, тиск в порожнині А гідравлічного циліндра 14 зменшується, останов 8 блокує епіцикл 9. Крутний момент передається на заднє праве колесо. Поворот ліворуч здійснюється аналогічно повороту праворуч. При здійсненні повороту (розвороту) ліворуч на обмеженій ділянці місцевості або коли необхідно реалізувати поворот на місці, водій за допомогою пульту управління 20 з перемикачем 25 подає напругу на електропневматичний клапан 21 та з'єднує джерело тиску робочого тіла 15 з гальмівною камерою 18 та блокує заднє ліве колесо 6 за допомогою гальмівного механізму 16. Повертаючи рульове колесо ліворуч, водій збільшує тиск мастила в порожнині В гідравлічного циліндра 14, що спричинює розгальмуванню епіциклу 3 за допомогою гідравлічного циліндра 23 управління остановом 2, передача крутного моменту на ліве заднє колесо припиняється. Одночасно з цим водій збільшує оберти двигуна, що призводить до збільшення тягових сил на задньому правому колесі 12 (забігаючому) борту. В результаті цього здійснюється поворот транспортного засобу навколо загальмованого лівого заднього колеса 6 (відстаючого) борту. Після завершення повороту водій за допомогою пульту управління 20 з перемикачем 25 та електропневматичного клапана 21 роз'єднує джерело тиску робочого тіла 15 з гальмівною камерою 18 та розблоковує гальмівний механізм 16 заднього лівого колеса 6. Повертаючи рульове колесо в середнє положення, водій зменшує тиск в порожнині В гідравлічного циліндра 14, останов 2 блокує епіцикл 3. Крутний момент передається на заднє ліве колесо. Поворот (розворот) праворуч на обмеженій ділянці місцевості, або коли необхідно реалізувати поворот на місці, здійснюється аналогічно повороту(розвороту) ліворуч. Запропонована система істотно підвищує маневреність автомобіля, що дозволяє забезпечити маневреність транспортного засобу при русі в колоні, важких дорожніх умовах, коли необхідно реалізувати поворот на місці або на обмеженій ділянці місцевості. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Система управління колесами ведучого моста при динамічному способі управління транспортним засобом, яка містить джерело тиску робочого тіла, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між джерелом тиску та гальмівними камерами коліс, яка відрізняється тим, що вона додатково має планетарні механізми правого і лівого бортів, а крани управління гальмами лівого і правого бортів виконані у вигляді електропневматичних клапанів. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B62D 11/08
Мітки: засобом, способи, система, управління, транспортним, динамічному, моста, колесами, ведучого
Код посилання
<a href="https://ua.patents.su/4-110465-sistema-upravlinnya-kolesami-veduchogo-mosta-pri-dinamichnomu-sposobi-upravlinnya-transportnim-zasobom.html" target="_blank" rel="follow" title="База патентів України">Система управління колесами ведучого моста при динамічному способі управління транспортним засобом</a>
Система підвищення маневреності вантажного автомобіля
Номер патенту: 100699
Опубліковано: 10.08.2015
Автори: Мазін Олексій Сергійович, Подригало Михайло Абович, Нікорчук Андрій Іванович, Кайдалов Руслан Олегович
МПК: B60T 13/26
Мітки: вантажного, система, маневреності, підвищення, автомобіля
Формула / Реферат:
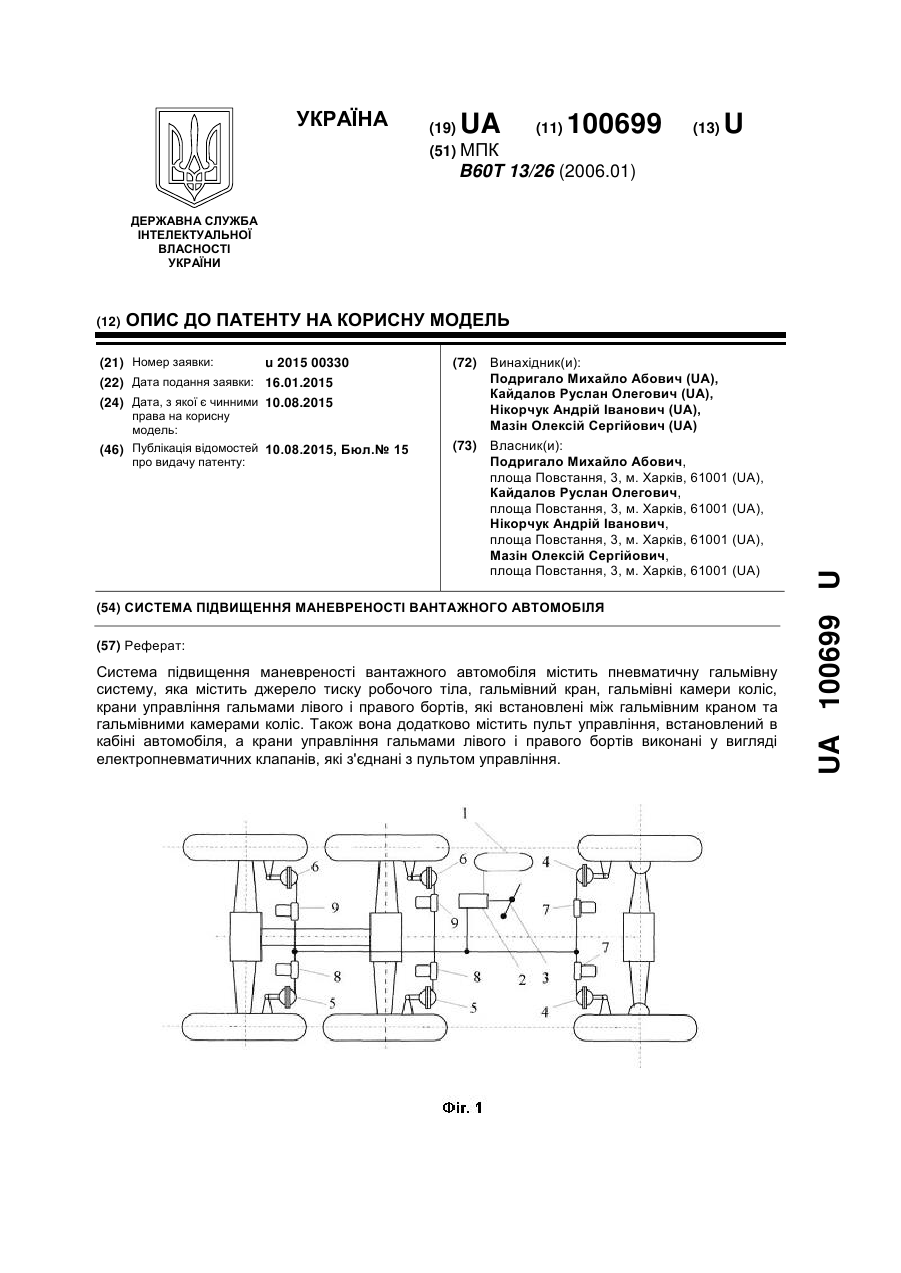
Система підвищення маневреності вантажного автомобіля, що містить пневматичну гальмівну систему, яка містить джерело тиску робочого тіла, гальмівний кран, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між гальмівним краном та гальмівними камерами коліс, яка відрізняється тим, що вона додатково містить пульт управління, встановлений в кабіні автомобіля, а крани управління гальмами лівого і правого...
Система повороту вантажного автомобіля
Номер патенту: 102955
Опубліковано: 25.11.2015
Автори: Подригало Михайло Абович, Нікорчук Андрій Іванович, Дунь Сергій Вікторович, Шаповал Віталій Володимирович, Кайдалов Руслан Олегович
МПК: B62D 11/08
Мітки: система, вантажного, автомобіля, повороту
Формула / Реферат:
1. Система повороту вантажного автомобіля, яка містить елементи гальмової системи автомобіля та включає джерело тиску робочого тіла, гальмівний кран, гальмівні камери коліс, крани управління гальмами лівого і правого бортів, які встановлені між гальмівним краном та гальмівними камерами коліс, систему управління, яка відрізняється тим, що крани управління гальмами лівого і правого бортів виконані у вигляді прискорювальних клапанів з...
Система керування колісним транспортним засобом
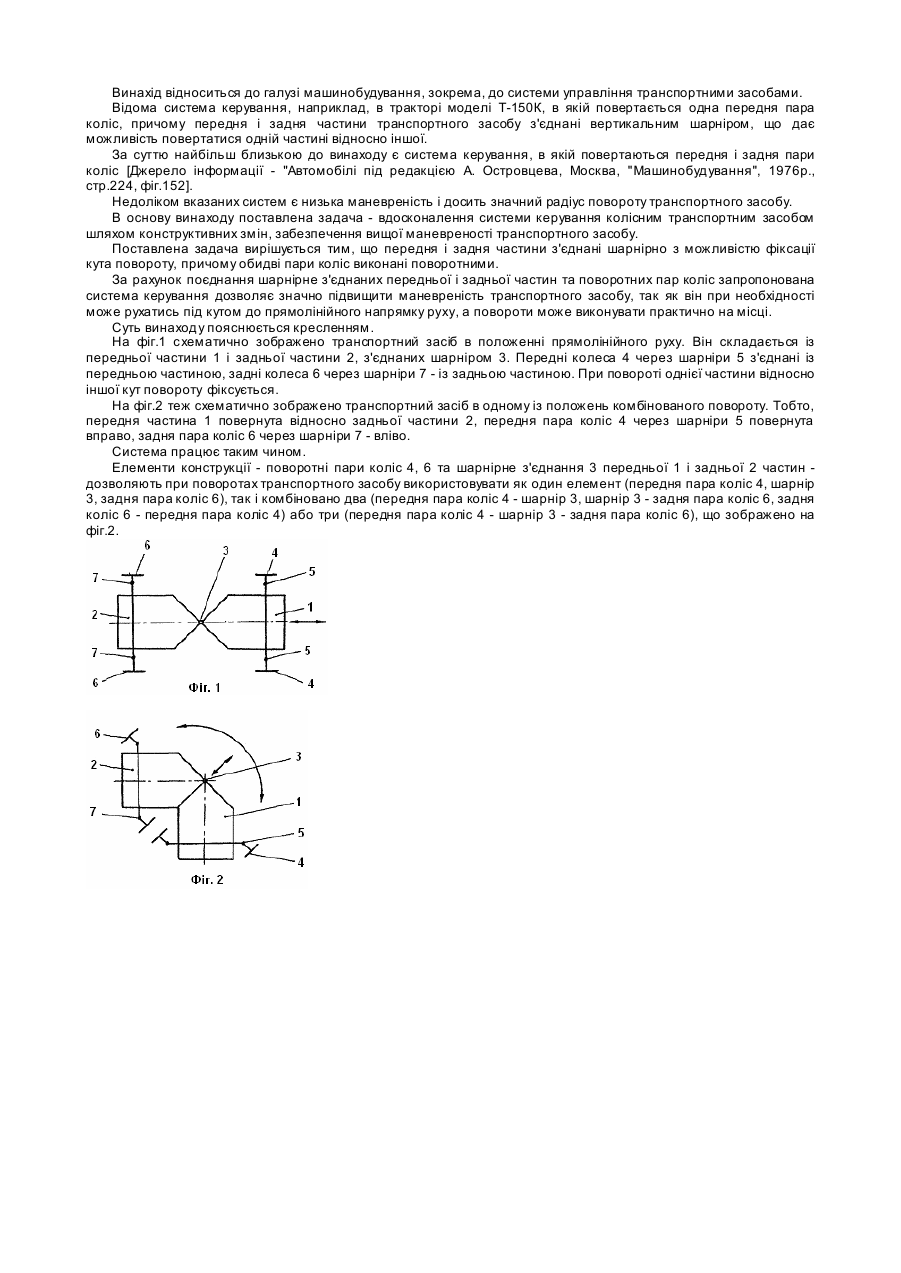
Номер патенту: 67344
Опубліковано: 15.06.2004
Автор: Мендела Олег Богданович
МПК: B60W 10/00
Мітки: керування, транспортним, система, колісним, засобом
Формула / Реферат:
Система керування колісним транспортним засобом, що містить передню і задню частини з парами коліс, яка відрізняється тим, що передня і задня частини з'єднані шарнірно з можливістю фіксації кута повороту, причому обидві пари коліс виконані поворотними.
Система управління транспортним засобом
Номер патенту: 11693
Опубліковано: 25.12.1996
Автори: Бондарєв Євгеній Ілліч, Воронов Микола Сергійович
МПК: B60T 7/04
Мітки: засобом, система, транспортним, управління
Формула / Реферат:
Система управления транспортным средством, содержащая двухпедальный механизм управления аварийными тормозами и двухпедальный механизм управления гидроприводом с промежуточным валом, оборудованным ограничителем, расположенный между двух упоров, отличающаяся тем, что, с целью повышения надежности и долговечности систем аварийных и рабочих тормозов, а также повышения безопасности движения транспортного средства, на педалях механизма...
Система управління колісним транспортним роботом
Номер патенту: 98660
Опубліковано: 12.05.2015
Автори: Євтухов Богдан Миколайович, Дергачов Костянтин Юрійович, Басова Анна Євгенівна, Кулік Анатолій Степанович
МПК: B25J 5/00
Мітки: транспортним, управління, роботом, система, колісним
Формула / Реферат:
Система управління колісним транспортним роботом, що містить платформу, три колеса, два колісні вали із змонтованими на них колесами, два електродвигуни, датчик кута повороту першого колеса, датчик швидкості обертання першого колеса, датчики кута повороту другого колеса і датчик швидкості обертання другого колеса, виходи датчиків першого та другого коліс з'єднані з входами контролерів управління електродвигунами першого та другого коліс,...
Попередній патент: Відцентровий фільтр з жалюзійною решіткою
Наступний патент: Спосіб випробування на контактну взаємодію залізничних рейок і коліс “reprint”
Випадковий патент: Спосіб безконтактного вимірювання розмірних ознак фігури людини