Радіолокатор
Номер патенту: 12453
Опубліковано: 28.02.1997
Автори: Побережний Андрій Анатолійович, Яковенко Віталій Адольфович, Дорощук Валерій Анатолійович, Кудряшов Валерій Євгенійович
Формула / Реферат
Радиолокатор, содержащий передающую антенну, приемную антенну, соединенную со вторым входом первого смесителя, последовательно соединенные усилитель, блок обработки и индикатор, отличающийся тем, что дополнительно введены устройство формирования линейно-частотномодулированных сигналов, выход которого подключен к передающей антенне и к первому входу первого смесителя, формирователь управляющих сигналов, первый выход которого соединен со входом устройства формирования линейно частотномодулированных сигналов, второй выход подключен ко второму входу индикатора, синтезатор частот, вход которого подключен к третьему выходу формирователя управляющих сигналов, второй смеситель, первый вход которого подключен к выходу синтезатора частот, второй вход - к выходу первого смесителя, канал распознавания в составе последовательно соединенных блока управления, второго постоянного запоминающего устройства, коррелятора, порогового устройства, выход которого подключен к третьему входу индикатора, а второй вход подключен ко второму выходу блока управления, а также оперативного запоминающего устройства, первый выход которого подключен к входу блока управления, а второй выход - ко второму входу коррелятора, а блок обработки содержит последовательно соединенные многоканальный коррелятор, блок обращения матрицы, первый перемножитель, второй перемножитель, а также аналогоцифровой преобразователь, вход которого подключен к выходу усилителя, а выход -ко входу многоканального коррелятора, первое постоянное запоминающее устройство, вход которого подключен ко второму выходу формирователя управляющих сигналов, первый выход подключен ко второму входу первого перемножителя и второму входу второго перемножителя, а второй выход - к третьему входу первого псременожителя и ко входу инвертора, выход которого подключен к третьему входу второго перемножителя, а также делитель, вход которого подключен к выходу второго перемножителя, а выход- к первому входу индикатора и входу оперативного запоминающего устройства, являющегося входом канала распознавания.
Текст
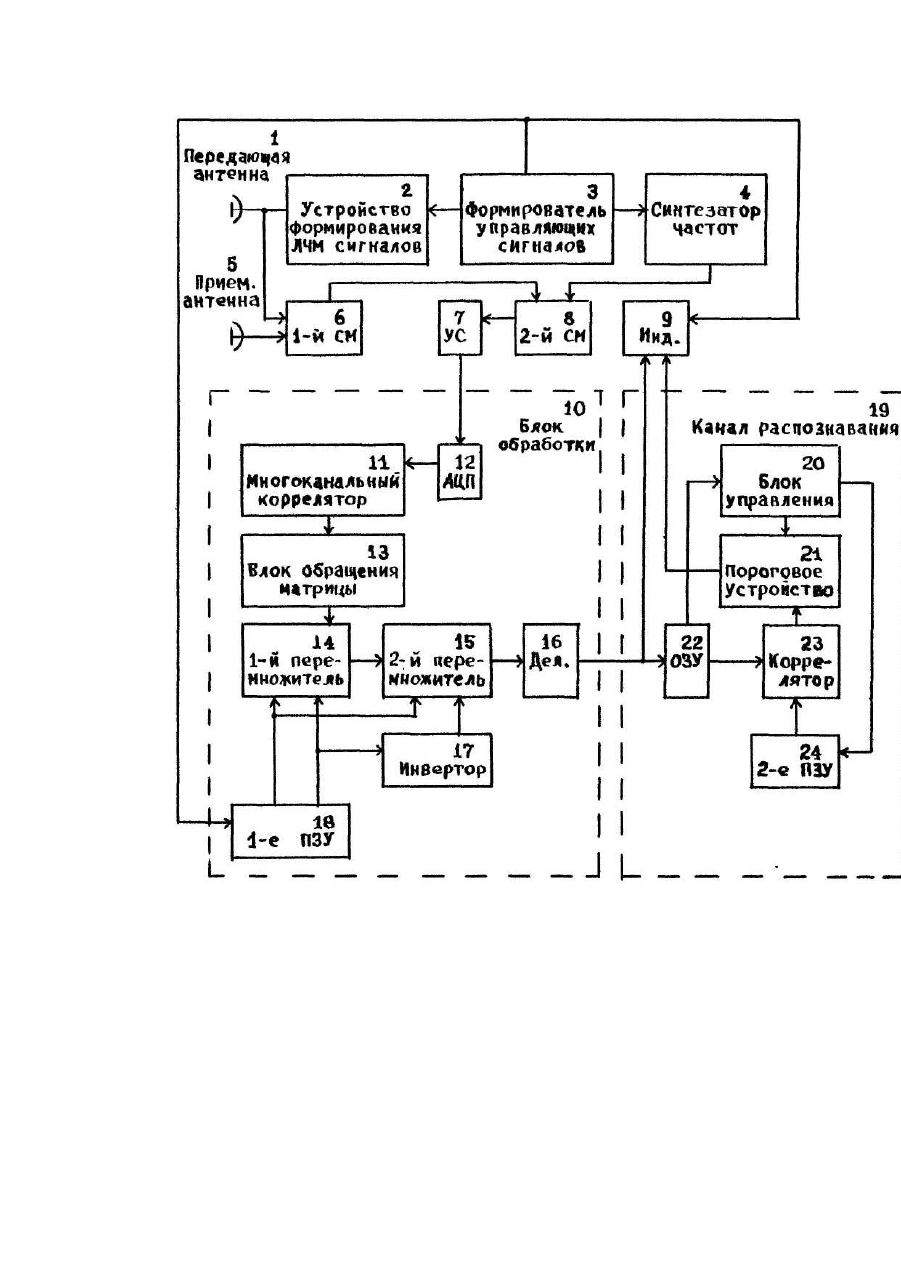
Изобретение относится к области радиотехники и может быть использовано в радиолокации для решения задач распознавания классов воздушны х целей. Наиболее близким к предлагаемому техническому решению, выбранному в качестве прототипа, является радиолокатор для измерения расстояния до поверхности, содержащий передающую антенну, для посылки в направлении поверхности ЧМ сигнала, вырабатываемого управляемым по частоте генератором, приемную антенну, соединенную со вторым входом смесителя, первый вход которого подключен к выходу управляемого по частоте генератора^ а выход смесителя, через усилитель соединен с входом блока обработки, который включает последовательно соединенные цепь оцифровки сигналов биений, блок автокорреляционной обработки, преобразователь время - частота, блок спектральной обработки и индикатор. Радиолокатор работает следующим образом. Управляемый по частоте генератор формирует зондирующий ЛЧМ сигнал, который излучается в сторону поверхности с помощью передающей антенны, Отраженный сигнал поступает на приемную антенну, а с нее .на второй вход смесителя. На первый вход смесителя поступает часть мощности зондирующего сигнала. Выделенный на выходе смесителя сигнал разностной частоты (сигнал биений) усиливается и поступает в блок обработки, содержащий цепь оцифровки, преобразователь время - частота, блок спектральной обработки и индикатор. Расстояние до поверхности при ЛЧМ определяется разностью между частотами излучаемого и принимаемого сигналов. Использование спектральной обработки позволяет измерить это расстояние. Недостатком прототипа является низкая разрешающая способность радиолокатора при большой дальности однозначного измерения расстояния до цели, а также невозможность решения задачи распознавания класса цели без дополнительных устройств. В основу изобретения поставлена задача создать такой радиолокатор, в котором за счет введения новых блоков решалась бы задача не только повышения точности измерения дальности, но и распознавания классов воздушных объектов. Изобретение позволяет расширить функциональные возможности радиолокатора, а также повысить его разрешающую способность по дальности. Поставленная задача решается за счет того, что в известный радиолокатор, содержащий передающую антенну, приемную антенну, соединенную со вторым входом первого смесителя, последовательно соединенные усилитель, блок обработки и индикатор, дополнительно введены устройство формирования линейно-частотно-модулированных сигналов (УФС), выход которого подключен к передающей антенне и к первому входу первого смесителя, формирователь управляющих си гналов (ФУС), первый выход которого соединен со входом УФС, второй выход подключен ко второму входу индикатора, синтезатор частот, вход которого подключен к третьему выходу ФУС, второй смеситель первый вход которого подключен к выходу синтезатора частот, второй вход к выходу первого смесителя, канал распознавания в составе последовательно соединенных блока управления, второго постоянного запоминающего устройства (ПЗУ), коррелятора, порогового устройства, выход которого подключен к третьему входу индикатора, а второй вход подключен ко второму выходу блока управления, а также оперативного запоминающего устройства (ОЗУ), первый выход которого подключен к входу блока управления, а второй выход ко второму входу коррелятора, а блок обработки содержит последовательно соединенные многоканальный коррелятор, блок обращения матрицы, первый перемножитель, второй перемножитель, а также аналого-цифровой преобразователь (АЦП), вход которого подключен к выходу усилителя, а вы ход ко входу многоканального коррелятора, первое постоянное запоминающее устройство, вход которого подключен ко второму выходу ФУС, первый выход подключен ко второму входу первого перемножителя и второму входу второго перемножителя, а второй выход к третьему входу первого перемножителя и ко входу инвертора, выход которого подключен к третьему входу второго перемножителя, а также делителья, ход которого подключен к выходу второго перемножителя, а выход к первому входу индикатора и входу ОЗУ, являющегося входом канала распознавания. Структурная схема предлагаемого радиолокатора приведена на чертеже. Предлагаемый радиолокатор содержит передающую антенну 1, УФС 2, ФУС 3, синтезатор частот 4, приемную антенну 5, первый смеситель 6, усилитель 7, второй смеситель 8, индикатор 9, блок обработки 10, включающий многоканальный коррелятор 11, АЦП 12, блокобращения матрицы 13, первый перемножитель 14, второй перемножитель 15, делитель 16, инвертор 17, первый ПЗУ 18, а также канал распознавания 19, включающий блок управления 20, пороговое устройство 21, ОЗУ 22, коррелятор 23, второй ПЗУ 24. При этом ФУС З, УФС 2, первый смеситель 6, второй смеситель 8, усилитель 7 соединены последовательно. Передающая антенна 1 подключена к выходу УФС 2, а приемная антенна 5 подключена ко второму входу первого смесителя 6. Выход синтезатора частот 4 соединен с первым входом второго смесителя 8, а его вход соединен с третьим выходом ФУС 3, второй выход которого соединен со вторым входом индикатора 9 и со входом первого ПЗУ 18. В блоке обработки 10 последовательно соединены АЦП 12, многоканальный коррелятор 11, блок обращения матрицы 13, первый перемножитель 14, второй перемножитель 15 и делитель 16, выход которого соединен с первым входом индикатора 9 и входом ОЗУ 22 в канале распознавания 19. Вход АЦП 12 является входом блока обработки 10 и соединен с выходом усилителя 7. Первый выход первого ПЗУ 18 соединен со вторым входом первого перемножителя 14 и вторым входом второго перемножителя 15, а второй выход с третьим входом первого перемножителя 14 и со входом инвертора 17, выход которого соединен с третьим входом второго перемножителя 15. В канале распознавания последовательно соединены блок управления 20, второе ПЗУ 24, коррелятор 23, пороговое устройство 21, выход которого подключен к третьему входу индикатора 9, а второй вход подключен ко второму выходу блока управления 20. Первый выход ОЗУ 22 соединен с входом блока управления 20, а второй выход со вторым входом коррелятора 23. Предлагаемый радиолокатор работает следующим образом. Устройство формирования ЛЧМ сигналов 2 формирует непрерывный зондирующий и первый гетеродинный сигнал. Зондирующий ЛЧМ сигнал с начальной частотой fn и девиацией частоты Dfc излучается в пространство с помощью передающей антенны 1. Первый гетеродинный сигнал, отличающийся от зондирующего меньшим уровнем мощности, подается на первый вход первого смесителя 6. Девиация частоты зондирующего сигнала и первого гетеродинного сигнала определяется: где Δf а - ширина полосы спектрального анализа блока обработки; с - скорость света; Τ-период модуляции; rm - требуемая дальность однозначного обнаружения цели. Девиация частоты в зависимости от режима работы радиолокатора изменяется при подаче на управляющий вход УФС 2 соотве тствующего кода первого выхода ФУСЗ. В соответствии с (1) при фиксированных полосе частотного анализа и разрешающей способности блока обработки 10 изменение разрешающей способности радиолокатора по дальности может быть достигнуто путем изменения девиации частоты Dfc. Для просмотра выбранного участка дальности с повышенным разрешением используется второй гетеродинный сигнал, вырабатываемый синтезатором частот 4, в соответствии с кодовым сигналом, поступающим на управляющий вход с третьего выхода ФУС 3. При этом обеспечивается частотное смещение полосы анализа блока обработки 10 на величину: где r1 - расстояние до выбранного участка дальности. Одновременно изменяется и управляющий сигнал, поступающий со второго выхода ФУС 3 на второй вход индикатора 9. Под действием этого сигнала изменяется масштаб развертки индикатора 9 по дальности. Отраженный сигнал поступает на приемную антенну 5 и с нее на второй вход первого смесителя 6. С выхода первого смесителя 6 сигнал разностной частоты Fb поступает на второй вход второго смесителя 8, на первый вход которого поступает сигнал с синтезатора частот 4. Таким образом обеспечивается преобразование сигнала разностной частоты на частоту спектрального анализа, и затем преобразованный сигнал через усилитель 7 подается в блок обработки 10. В блоке обработки 10 производится преобразование аналогового сигнала в цифровую форму, получение РДП в спектральной области и определение дальности до облучаемого объекта с помощью индикатора 9. В результате радиолокатор измеряет расстояние до наблюдаемого объекта и его разрешающая способность определяется по формуле где ΔFn - разрешающая способность блока обработки. Спектральная оценка осуществляется в соответствии с алгоритмом Кейпона. Метод получения такой оценки обеспечивает высокую разрешающую способность измерения частоты (дальности) и определяется выражением: где Р(f) - спектральная плотность мощности; R автокорреляционной матрице, размером (р + 1) x (р+1): - матрица, обратная оцененной То - интервал временных отсчетов, Η - символ комплексного сопряжения и транспортирования. Исходя из (4, 5) блок обработки 10 функционирует следующим образом. С выхода усилителя 7 сигнал частоты f подается на АЦП 12, где происходит преобразование аналогового сигнала в цифровую форму. С выхода АЦП 12 оцифрованный сигнал подается на многоканальный коррелятор 11, в котором формируется оценочная автокорреляционная матрица R; В блоке обращения матрицы 13 происходит формирование обратной матрицы R -1, и затем соответствующие значения подаются на первый вход первого перемножителя 14. На второй и третий входы этого перемножителя подаются реальные и мнимые части векторов комплексных синусоид из первого ПЗУ 18 в соответствии с формулой (5). Результат перемножения поступает на первый вход второго перемножителя 15, на второй вход которого подаются реальные части вектора e(f), а на третий вход подаются мнимые значения этого же вектора с обратным знаком, изменение которого на противоположный β соответствии с процедурой комплексного сопряжения происходит в инверторе знакового разряда 17. На вход первого ПЗУ 18 подается управляющий сигнал с третьего выхода ФУС 3, который определяет выбор из первого ПЗУ 18 необходимых значений вектора обзора e(f) при изменении выбранного участка обзора по дальности. Результат перемножения X = eH(f) * R * e(f), подается на делитель 16, на выходе которого содержится спектральная оценка P(f), которая позволяет измерять не только дальность до объекта, но и его РДП. С выхода делителя 16 информация о дальности поступает на первый вход индикатора 9, а также на вход ОЗУ 22, являющийся входом канала распознавания 19. Канал распознавания 19 работает следующим образом. В ОЗУ 22 запоминаются значения P(f) полученного РДП и с первого выхода его подается управляющий сигнал на блок управления 20, который вырабатывает на своем первом выходе сигналы разрешения на выдачу из второго ПЗУ 24 значений РДП, соответствующи х различным классам воздушных целей. Со второго выхода ОЗУ 22 значения P(f) подаются на второй вход коррелятора 23, на первый вход которого подаются значения эталонных РДП. В корреляторе 23 происходит вычисление коэффициента корреляции между полученными РДП и эталонными. Значения этого коэффициента поступают на первый вход порогового устройства 21, на второй вход которого поступает пороговый уровень со второго выхода блока управления 20. При превышении заданного порога с порогового устройства 21 выдается сигнал о классе воздушной цели, поступающий на третий вход индикатора 9. Элементы предлагаемого радиолокатора могут быть реализованы следующим образом. В качестве ФУС 3 может быть использовано устройство, состоящее из регистра вывода, дешифратора адреса и управляющих сигналов, регистра связи с внешним устройством. Устройство формирования линейно-частотно-модулированных сигналов 2 может быть реализовано, например, по схеме устройства формирования сигналов с угловой модуляцией, содержащей управляемый напряжением генератор, блок формирования сигналов управления, блок формирования опорного сигнала, формирователь кодовых управляющих сигналов, фазовый дискриминатор, блок ввода-вывода, блок ПЗУ, причем вместо формирователя сигналов управления параметрами для выдачи управляющих сигналов используют ФУС 1. В качестве синтезатора частот использовано устройство, построенное по принципу цифровой ФАПЧ управляемого генератора. Команда управления устанавливает коэффициент деления делителя частоты в цепи ФАПЧ. В качестве индикатора можно использовать индикатор типа AN/USA-26n. Таким образом, в предлагаемом радиолокаторе используется адаптивный алгоритм спектрального анализа, обладающий высокой разрешающей способностью, что позволяет не только измерять дальность до объекта с более высокой точностью, но и получить РДП объекта в спектральной области, производить сравнение РДП с эталонами и выдавать решение о принадлежности к тому или иному классу воздушной цели.
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar set
Автори англійськоюKudriashov Valerii Yevheniiovych, Doroschuk Valerii Anatoliiovych, Poberezhnyi Andrii Anatoliiovych, Yakovenko Vitalii Adolfovych
Назва патенту російськоюРадиолокатор
Автори російськоюКудряшов Валерий Евгеньевич, Дорощук Валерий Анатольевич, Побережный Андрей Анатольевич, Яковенко Виталий Адольфович
МПК / Мітки
МПК: G01S 13/34
Мітки: радіолокатор
Код посилання
<a href="https://ua.patents.su/4-12453-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор</a>
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: сигнатурний, багатоканальний, аналізатор
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Кизилов Володимир Улянович, Давидов Анатолій Семенович, Смілянський Ігор Ісаакович
МПК: G01R 11/00
Мітки: лічильник, електроенергії
Формула / Реферат:
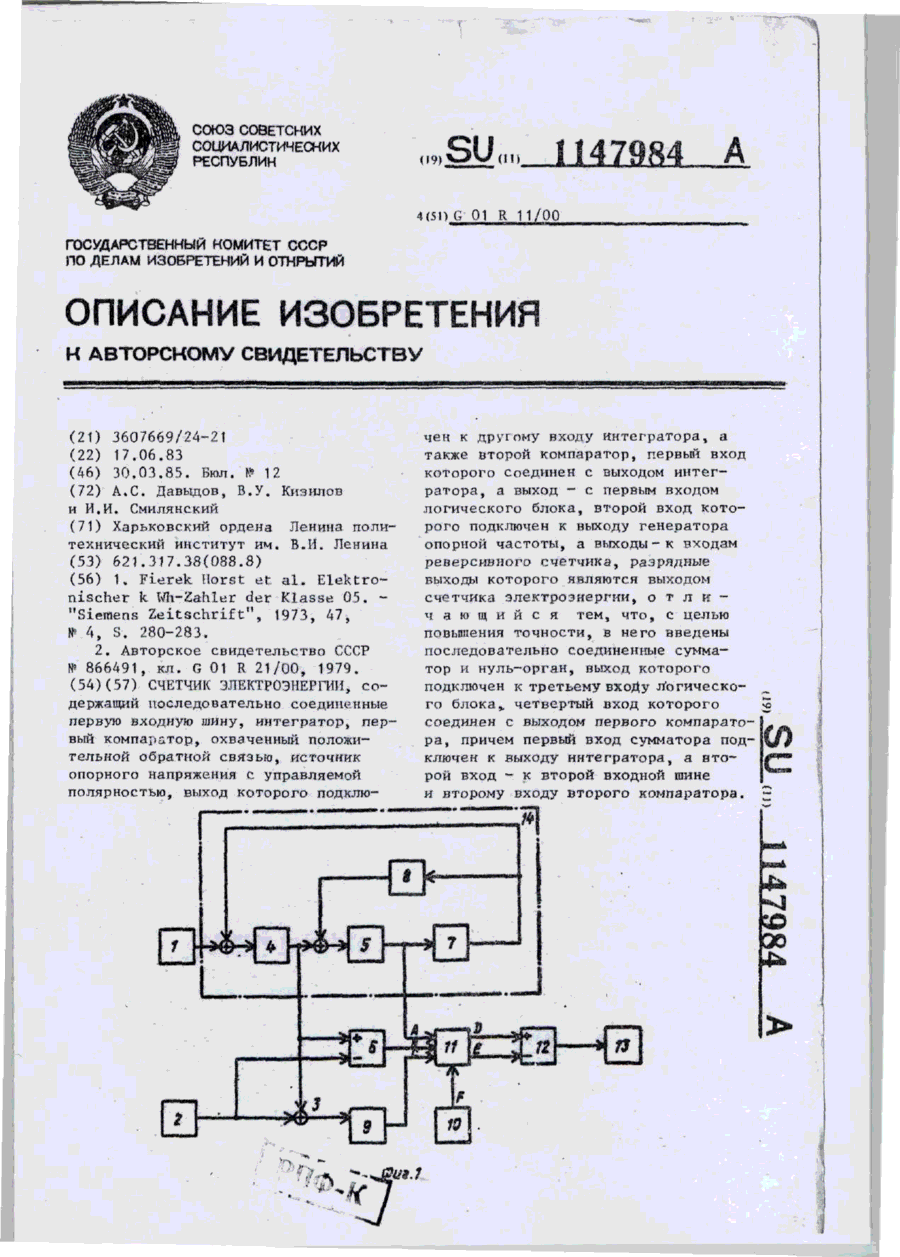
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Носулько Віктор Дмитрович, Кизилов Володимир Улянович
МПК: G01R 31/08
Мітки: вимірювач, короткого, замикання, місця, відстані
Формула / Реферат:
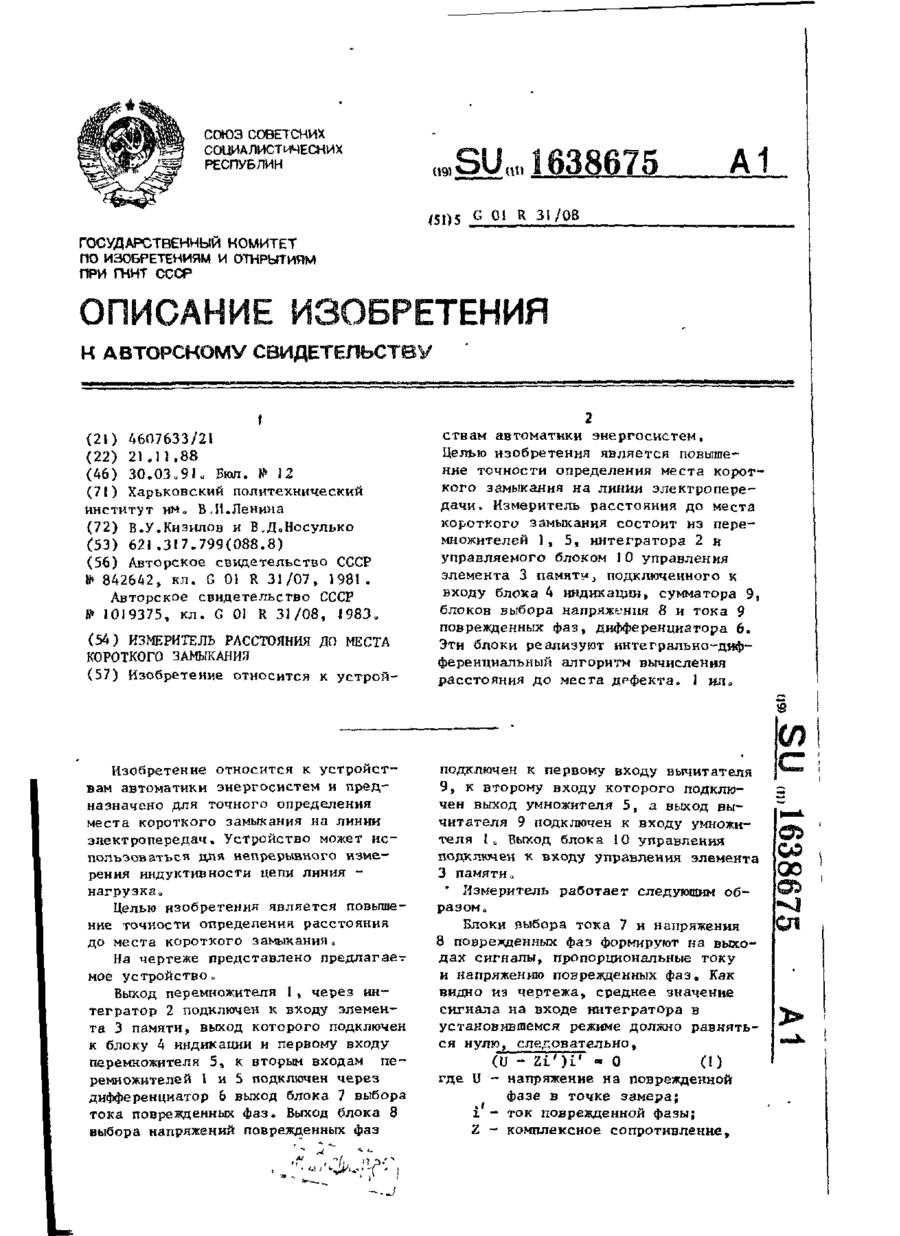
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Пристрій для керування поляризацією електромагнітної хвилі
Номер патенту: 8176
Опубліковано: 29.03.1996
Автор: Касьянов Сергій Володимирович
МПК: H03C 7/00
Мітки: пристрій, поляризацією, електромагнітної, хвилі, керування
Формула / Реферат:
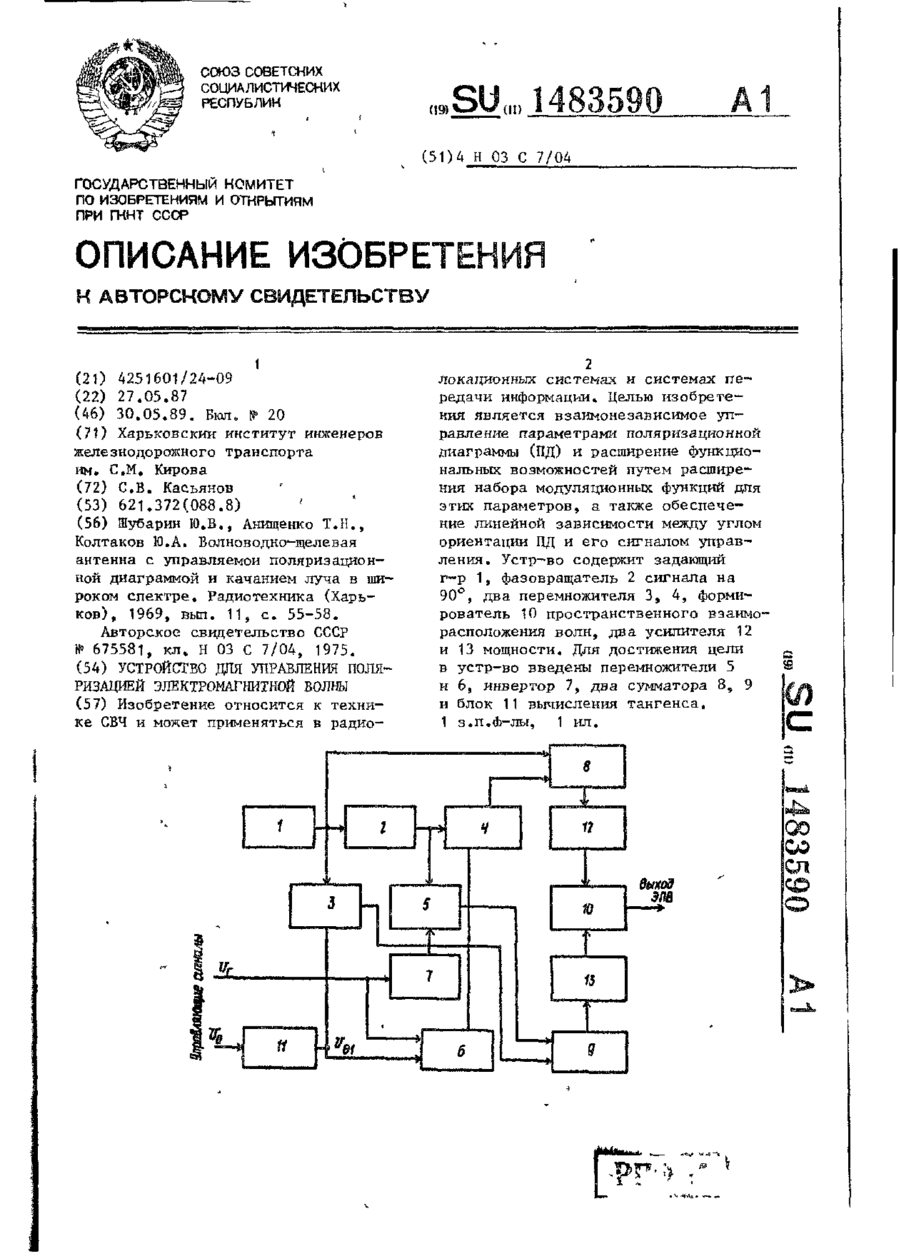
1. Устройство для управления поляризацией электромагнитной волны, содержащее задающий генератор, выход которого подключен к первому входу первого перемножителя, фазовращатель на 90°, второй персмножитсль и формирователь пространственного взаиморасположения волн, выход которого является выходом устройства, отличающееся тем, что, с целью взаимонезависимого управления параметрами поляризационной диаграммы и расширения функциональных...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: фазового, зсуву, пристрій, вимірювання
Формула / Реферат:
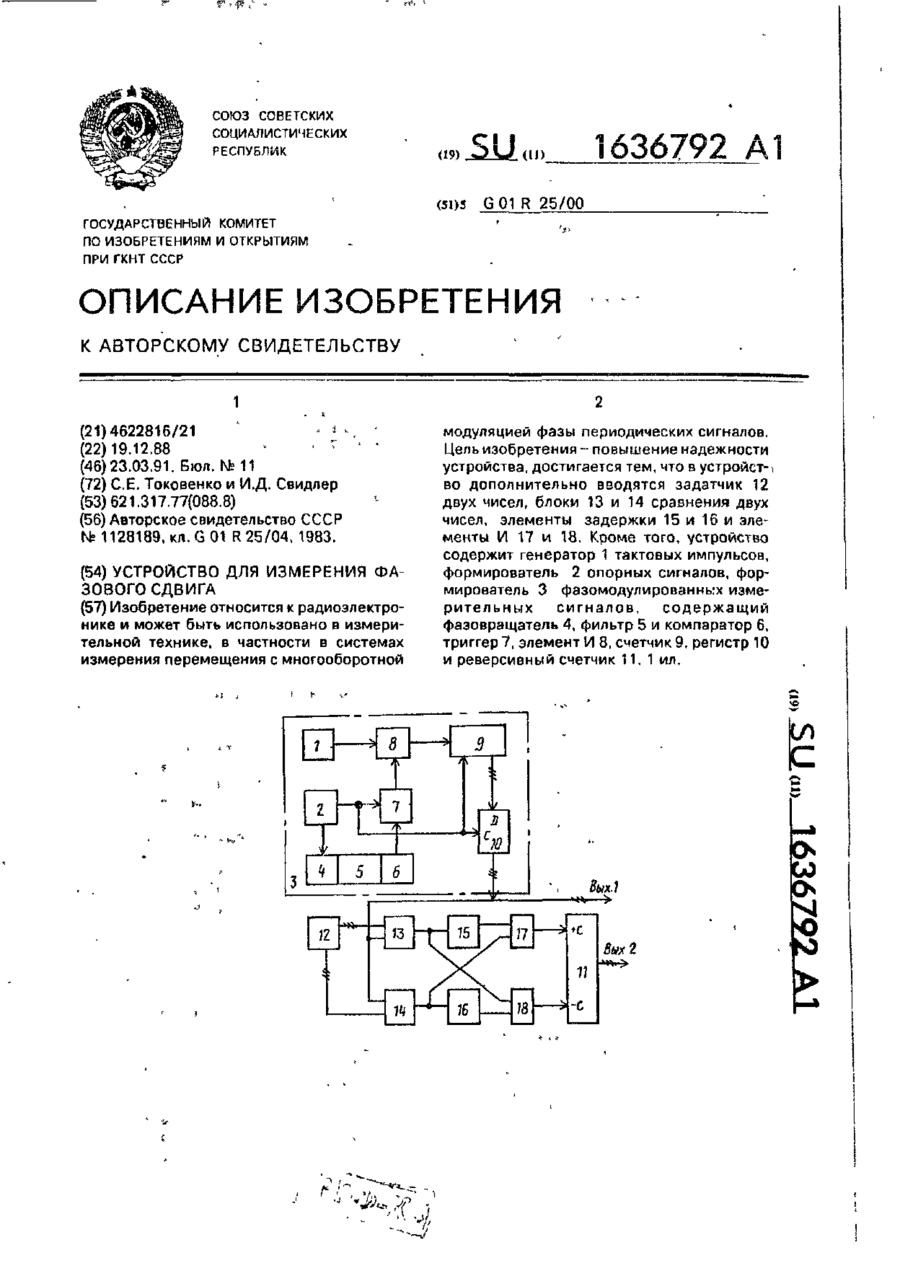
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Попередній патент: Інструмент-катод для електрохімічної абразивної обробки отворів
Наступний патент: Склад сплаву для наплавлення
Випадковий патент: Пристрій для керування електричним режимом дугової електропечі