Система для підйому затонулих суден
Формула / Реферат
(57) 1. Система для подъема затонувших судов, содержащая самоходный понтон с грузозахватными органами для взаимодействия с затонувшим судном, выполненными с возможностью изменения своей длины и расположенными попарно на бортах корпуса понтона, отличающаяся тем, что каждый грузозахватный орган выполнен в виде телескопической балки и гибкого элемента, который кинематически связан с последней посредством зубчато-реечной передачи и выполнен с возможностью изгиба посредством гидравлического привода в своих средней и концевой частях.
2. Система по п.1, отличающаяся тем, что каждый гибкий элемент в своей концевой части снабжен буровым устройством.
3. Система по п.1, отличающаяся тем, что каждый гибкий элемент выполнен с балластируемыми полостями.
Текст
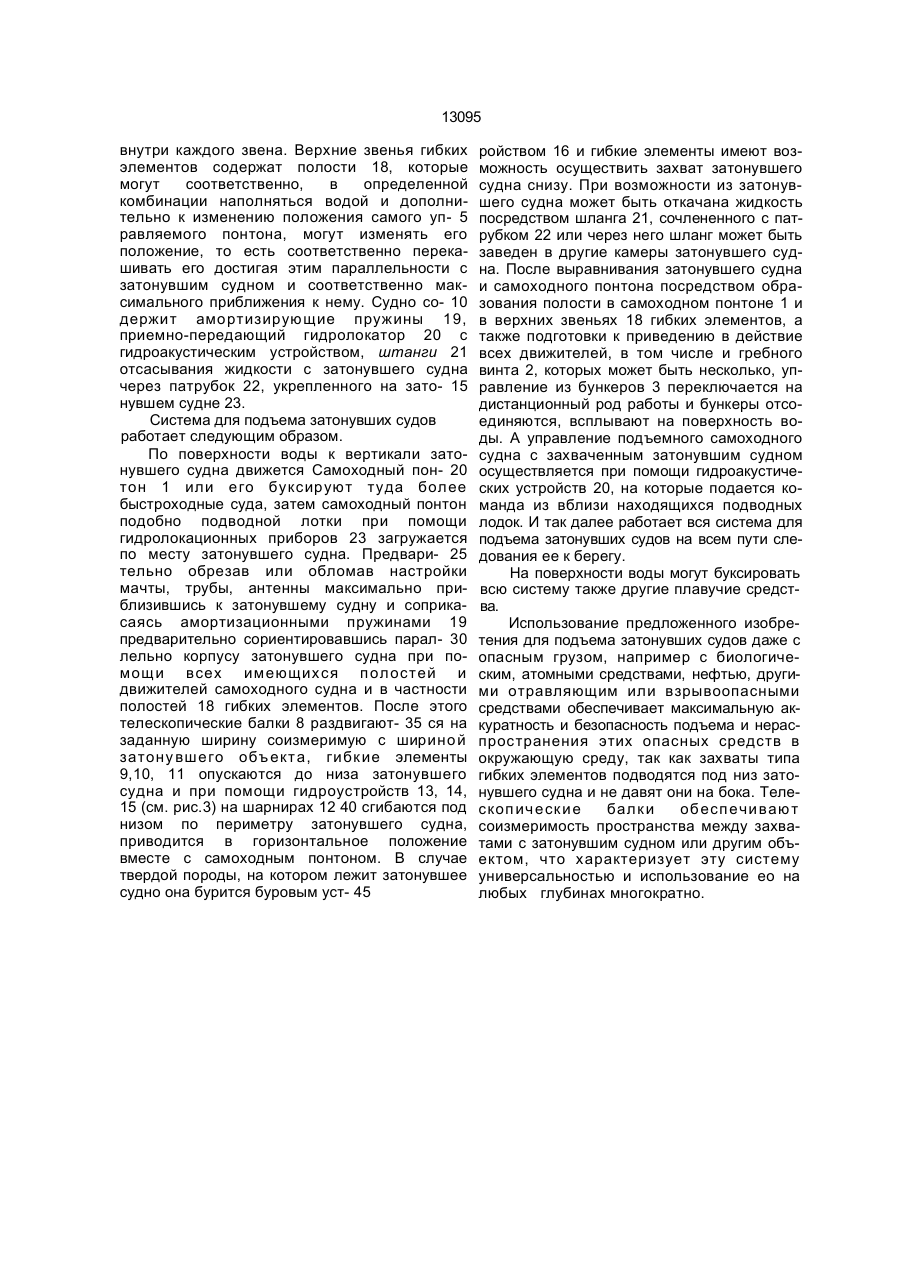
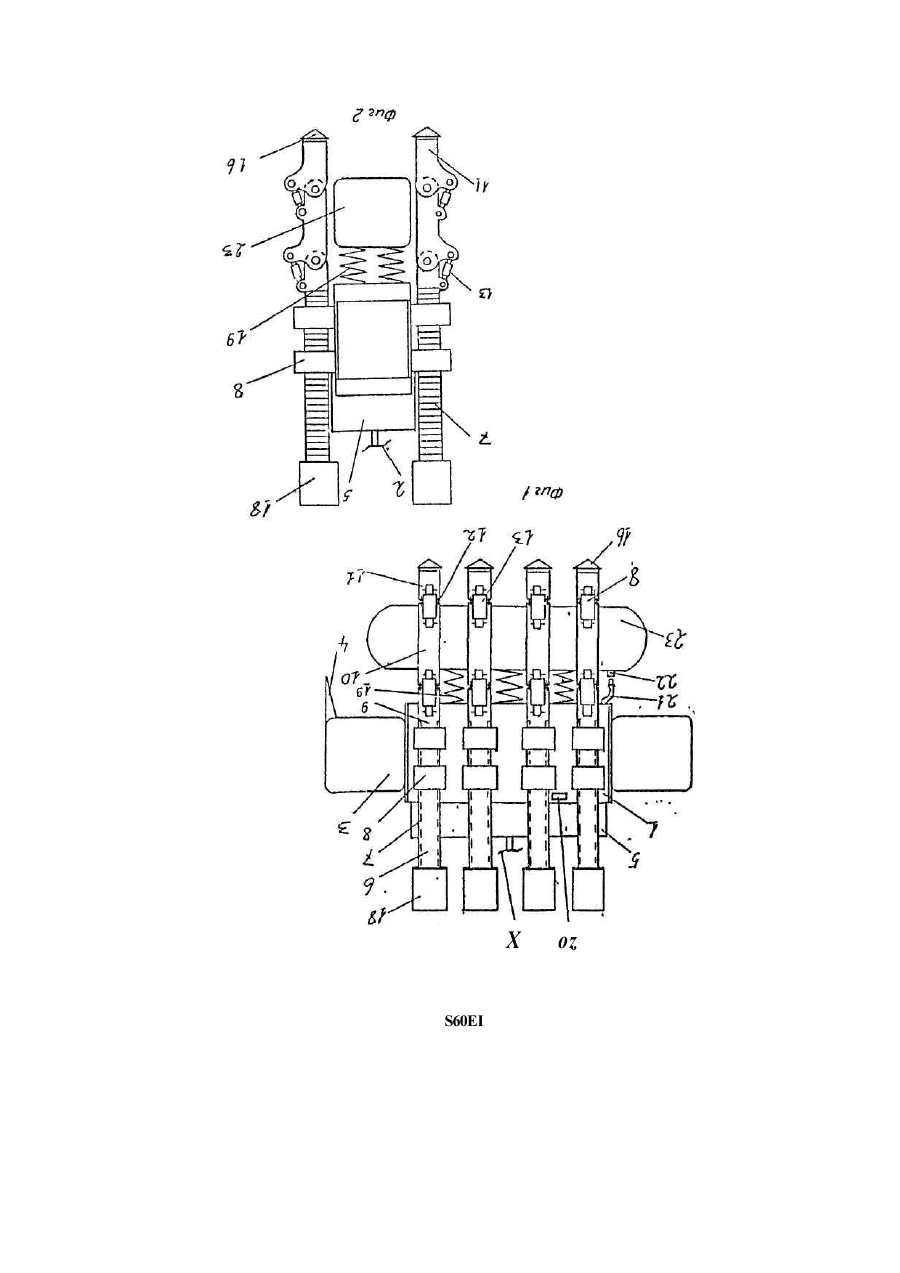
1. Система для подъема затонувших су дов, содержащая самоходный понтон с гру з о з ах в ат н ым и органам и для взаимодействия с затонувшим судном, вы полненными с возможностью изменения своей длины и расположенными попарно на Изобретение относится к устройствам для подъема затонувших судов и других предметов. Цель изобретения - повышение эффективности, надежности и безопасности подъема затонувшего судна или другого объекта. На фиг. 1 схематически изображен самоходный понтон с бункерами и гибкими элемент ами в вид е л ап , межд у которых содержится затонувшее судно, вид сбоку; на фиг. 2 - то же, с затонувшим судном; на фиг. 3 - элемент (лапы) самоходного понтона. Система для подъема затонувших судов содержит (фиг. 1) самоходный понтон 1 с известными машинами управления, которые на рисунке не показаны, обеспечивающие его передвижение по поверхности воды, по месту затонувшего судна и обратно к берегу. Гребной винт 2 вертикального действия расположенный сверху на самоходном судне, бортах корпуса понтона, о т л и ч а ю щ а я с я тем, что каждый грузозахватный орган выполнен в виде телескопической балки и гибкого элемента, который кинематически связан с последней посредством зубчатореечной передачи и выполнен с возможностью изгиба посредством гидравлического привода в своих средней и концевой частях. 2. Система по п. 1,о т л и ч а ю щ а я с я тем, что каждый гибкий элемент в своей кон цевой части снабжен буровым устройством. 3. Система по п. 1,о т л и ч а ю щ а я с я тем, что каждый гибкий элемент выполнен с балластируемыми полостями. бункеры 3 расположенные по торцам самоходного судна с пультами управления машинами самоходного понтона, способных отсоединяться от самоходного понтона и самостоятельно всплывать на поверхность воды, ножи 4 для срезания надстроек на затонувшем судне, укрепленных снизу бункеров, плоскости 5 поворотно управляемые для корректировки судна, элементы 6 с зубчатыми рейками 7, которые в зацеплении с зубчатыми колесами установленными на телескопически раздвигающихся балках 8, зубчатые колеса на рисунке не показаны. Гибкие элементы состоят из звеньев 9,10,11 (фиг. 1,3). Звенья гибких элементов сочленены шарнирами 12 и оснащены гидроцилиндрами 13, соединенными с гидронасосами 14 управляемые электродвигателями 15. Нижние звенья 11 гибких элементов оснащены буровыми устройствами 16 с автономным электроприводом 17, установленным С > о о ел О 13095 внутри каждого звена. Верхние звенья гибких элементов содержат полости 18, которые могут соответственно, в определенной комбинации наполняться водой и дополнительно к изменению положения самого уп- 5 равляемого понтона, могут изменять его положение, то есть соответственно перекашивать его достигая этим параллельности с затонувшим судном и соответственно максимального приближения к нему. Судно со- 10 держит амортизирующие пруж ины 19, приемно-передающий гидролокатор 20 с гидроакустическим устройством, штанги 21 отсасывания жидкости с затонувшего судна через патрубок 22, укрепленного на зато- 15 нувшем судне 23. Система для подъема затонувших судов работает следующим образом. По поверхности воды к вертикали затонувшего судна движется Самоходный пон- 20 тон 1 или его буксируют туда бол ее быстроходные суда, затем самоходный понтон подобно подводной лотки при помощи гидролокационных приборов 23 загружается по месту затонувшего судна. Предвари- 25 тельно обрезав или обломав настройки мачты, трубы, антенны максимально приблизившись к затонувшему судну и соприкасаясь амортизационными пружинами 19 предварительно сориентировавшись парал- 30 лельно корпусу затонувшего судна при помощ и всех имеющих ся п ол ост ей и движителей самоходного судна и в частности полостей 18 гибких элементов. После этого телескопические балки 8 раздвигают- 35 ся на заданную ширину соизмеримую с ширино й затону вш его объ ект а, гибк ие элементы 9,10, 11 опускаются до низа затонувшего судна и при помощи гидроустройств 13, 14, 15 (см. рис.3) на шарнирах 12 40 сгибаются под низом по периметру затонувшего судна, приводится в горизонтальное положение вместе с самоходным понтоном. В случае твердой породы, на котором лежит затонувшее судно она бурится буровым уст- 45 ройством 16 и гибкие элементы имеют возможность осуществить захват затонувшего судна снизу. При возможности из затонувшего судна может быть откачана жидкость посредством шланга 21, сочлененного с патрубком 22 или через него шланг может быть заведен в другие камеры затонувшего судна. После выравнивания затонувшего судна и самоходного понтона посредством образования полости в самоходном понтоне 1 и в верхних звеньях 18 гибких элементов, а также подготовки к приведению в действие всех движителей, в том числе и гребного винта 2, которых может быть несколько, управление из бункеров 3 переключается на дистанционный род работы и бункеры отсоединяются, всплывают на поверхность воды. А управление подъемного самоходного судна с захваченным затонувшим судном осуществляется при помощи гидроакустических устройств 20, на которые подается команда из вблизи находящихся подводных лодок. И так далее работает вся система для подъема затонувших судов на всем пути следования ее к берегу. На поверхности воды могут буксировать всю систему также другие плавучие средства. Использование предложенного изобретения для подъема затонувших судов даже с опасным грузом, например с биологическим, атомными средствами, нефтью, другими отравляющим или взрывоопасными средствами обеспечивает максимальную аккуратность и безопасность подъема и нераспространения этих опасных средств в окружающую среду, так как захваты типа гибких элементов подводятся под низ затонувшего судна и не давят они на бока. Телескоп ич еск и е бал к и об есп е чи ваю т соизмеримость пространства между захватами с затонувшим судном или другим объектом, что характеризует эту систему универсальностью и использование ео на любых глубинах многократно. X S60EI oz 13095 11 Фиг. 3 Упорядник Замовлення 4098 Техред М.Моргентал Коректор О.Кравцова Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for lifting of sunk ships
Автори англійськоюFilipchuk Stepan Pavlovych, Filipchyk Stepan Pavlovych
Назва патенту російськоюСистема для подъема затонувших суден
Автори російськоюФилипчук Степан Павлович
МПК / Мітки
МПК: B63C 7/08
Мітки: система, підйому, затонулих, суден
Код посилання
<a href="https://ua.patents.su/4-13095-sistema-dlya-pidjjomu-zatonulikh-suden.html" target="_blank" rel="follow" title="База патентів України">Система для підйому затонулих суден</a>
Система для піднімання затонулих об’єктів
Номер патенту: 10022
Опубліковано: 30.09.1996
Автор: Кунгурцев Юрій Миколайович
Мітки: піднімання, система, об'єктів, затонулих
Формула / Реферат:
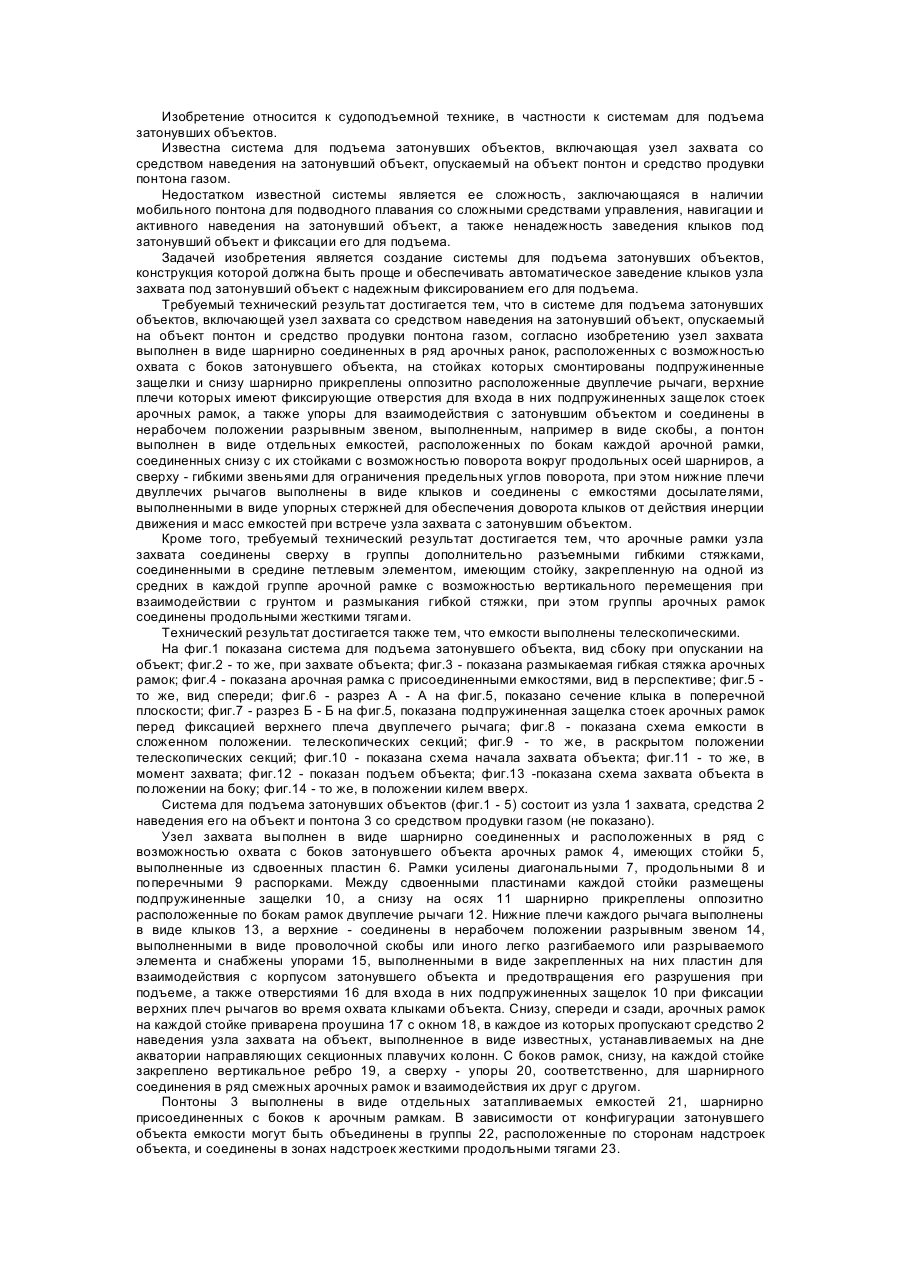
1. Система для подъема затонувших объектов, включающая узел захвата со средством наведения на затонувший объект, опускаемый на объект понтон и средство продувки понтона газом, отличающаяся тем, что узел захвата выполнен в виде шарнирно соединенных в ряд арочных рамок, расположенных с возможностью охвата с боков затонувшего объекта, на стойках которых смонтированы подпружиненные защелки и снизу шарнирно прикреплены оппозитно расположенные...
Пристрій для вивантажування насипного вантажу з суден
Номер патенту: 2567
Опубліковано: 26.12.1994
Автори: Юріє Олсоні, Пентті Вялімякі
МПК: B65G 67/00
Мітки: пристрій, вивантажування, суден, вантажу, насипного
Формула / Реферат:
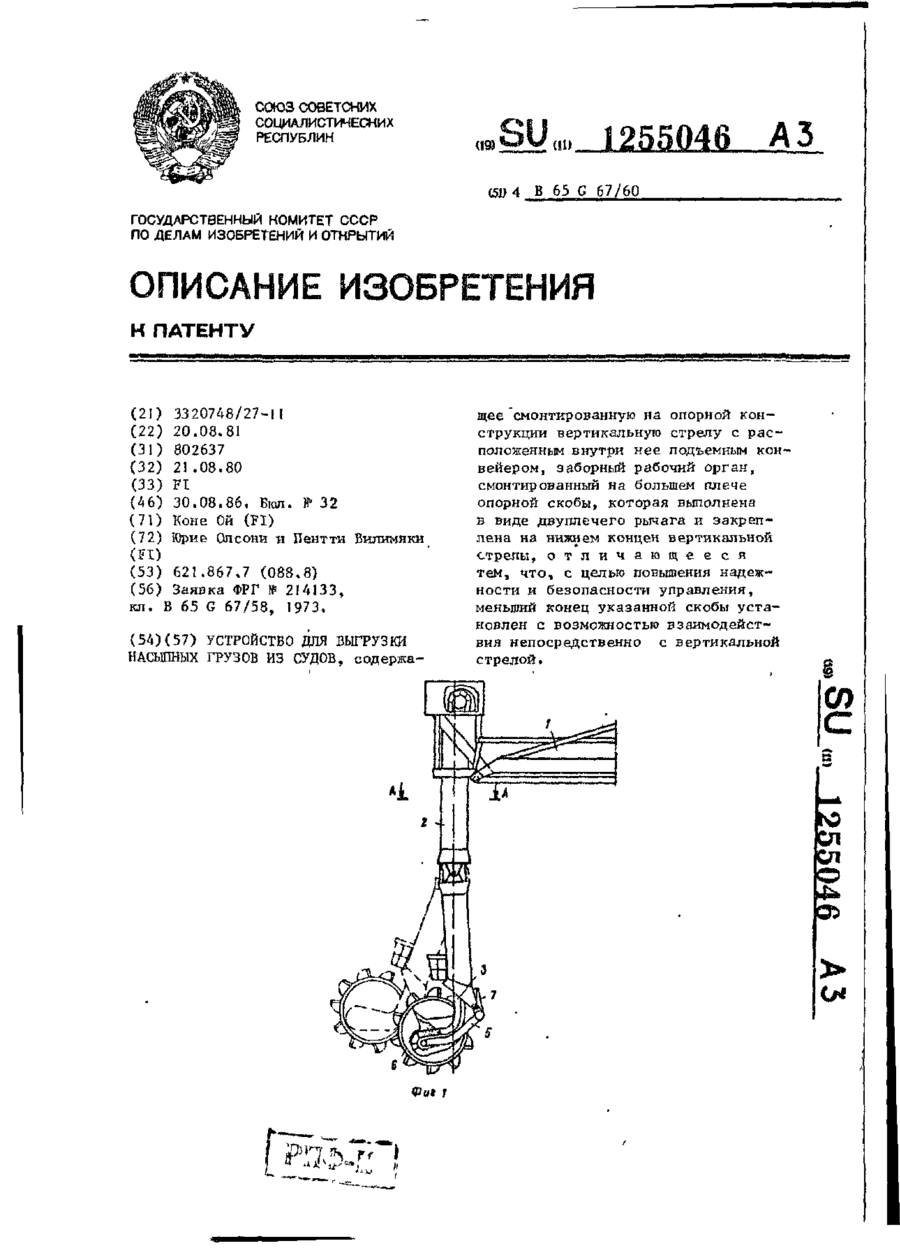
Устройство для выгрузки насыпных грузов из судов, содержащее смонтированную на опорной конструкции вертикальную стрелу с расположенным внутри нее подъемным конвейером, заборный рабочий орган, смонтированный на большем плече опорной скобы, которая выполнена в виде двуплечего рычага и закреплена на нижнем конце вертикальной стрелы, отличающееся тем, что, с целью повышения надежности и безопасности управления, меньший конец указанной скобы...
Пристрій для піднімання об’єкту, що затонув
Номер патенту: 6979
Опубліковано: 31.03.1995
Автор: Сарний Азріель Іцкович
МПК: B63C 7/10
Мітки: затонув, піднімання, пристрій, об'єкту
Формула / Реферат:
(57) Устройство для подъема затонувшего объекта, содержащее, по крайней мере, од но грузоподъемное средство, выполненное в виде эластичной надувной оболочки с узлом крепления к затонувшему объекту и управляемым клапаном для поддержания равенства давления внутри оболочки с гидростатическим давлением, которая размещена внутри силовой сетки, при этом внутренняя полость оболочки магистрально сообщена с источником газа, расположенным на надводном...
Переносний пристрій для підйому і опускання деталей на контактній мережі при ремонтних роботах

Номер патенту: 5389
Опубліковано: 28.12.1994
Автор: Чеботарьов Григорій Аврамович
МПК: B66D 1/26
Мітки: контактний, ремонтних, підйому, мережі, роботах, деталей, переносний, пристрій, опускання
Формула / Реферат:
Переносное приспособление для подъема и опускания деталей на контактной сети при ремонтных работах, содержащее корпус, крюк, канатный барабан и храповое колесо с собачкой, отличающееся тем, что оно снабжено фрикционными накладками на ребордах канатного барабана, упорным диском с управляющей рукояткой, закрепленным резьбовым соединением на указанном корпусе с возможностью перемещения и взаимодействия с подпружиненными нажимными...
Гідравлічна система самохідної сільськогосподарської машини
Номер патенту: 9161
Опубліковано: 30.09.1996
Автори: Кузьмінов Вадим Георгійович, Вчорашній Іван Григорович, Збарський Борис Абрамович, Умеренко Аркадій Аркадійович
МПК: A01B 63/10, F15B 15/26
Мітки: сільськогосподарсько, самохідної, машини, гідравлічна, система
Формула / Реферат:
Гидравлическая система самоходной сельскохозяйственной машины, содержащая насос, соединенный через распределитель с гидроцилиндрами подъема рабочих органов и копирующих щупов автомата вождения, отличающаяся тем, что, с целью предотвращения поломок рабочих органов и щупов при движении машины задним ходом путем исключения ошибочных действий оператора, система снабжена блокировочным сервоцилиндром, штоковая полость которого подключена к...
Попередній патент: Робочий орган вітродвигуна
Наступний патент: Кристалічний фосфат аквааммінцинку як стимулятор росту кукурудзи і люпину білого та спосіб його одержання
Випадковий патент: Hаваhтажувач рідкого гhою