Рухома шпалопідбивальна, підйомна та рихтувальна машина
Формула / Реферат
(57) Подвижная шпалоподбивочная, подъемная и рихтовочная машина, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней шпалоподбивочныйагрегат и лодъемно-рихтовочный агрегат, расположенный перед шпалоподбивочным агрегатом и состоящий из инструментальной рамы, установленной на раме машины с возможностью перемещения приводами в вертикальной плоскости и рихтовочными приводами в горизонтальной плоскости и соединенной с рамой машини тягой, двух пар колес с ребордами для опирання инструментальной рамы на рельсы, крюковых захватов для рельсов, расположенных в пертикальиих плоскостях, проходящих через оси указанных колес и установленных на инструментальной раме с обеих сторон от продольной плоскости симметрии машины с возможностью перестановки по высоте и перемещения в вертикальной, перпендикулярной указанной плоскости симметрия машины плоскости автономными гидроцилиндрами, и роликовых звхватоа для рельсов, установленных с обеих сторон от продольной плоскости симметрии машины и перед и сзади указанных двух пар колес, а также эталонную систему измерения и телескопическую перемещаемую гюперек машины гидроцилиндром консольную балку, на свободном конце которой закреплены перемещаемые по высоте приподами захват для рельса и опорный башмак, отличающаяся тем, что указанная консольная балка установлена нз инструментальной раме между парами колес с ребордами.
Текст
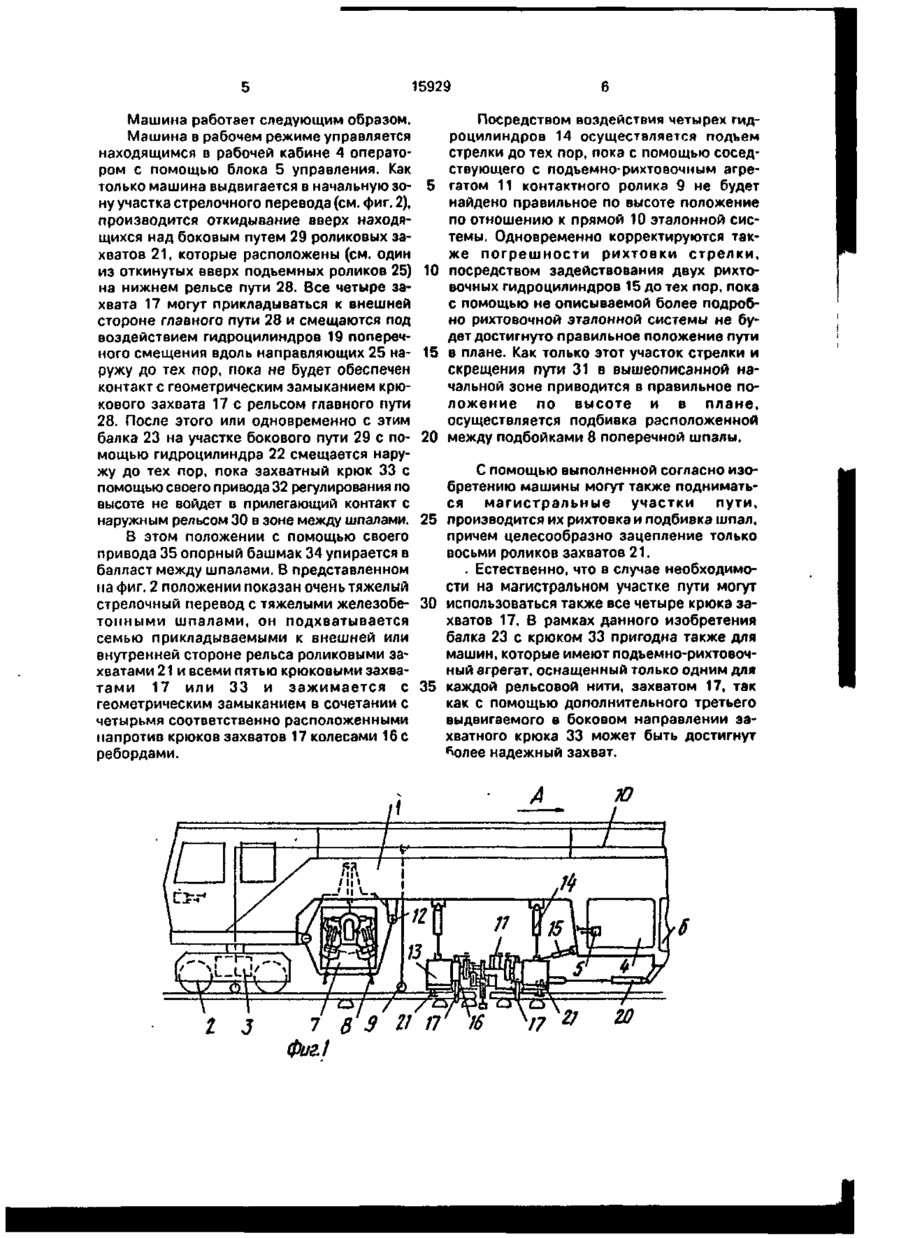
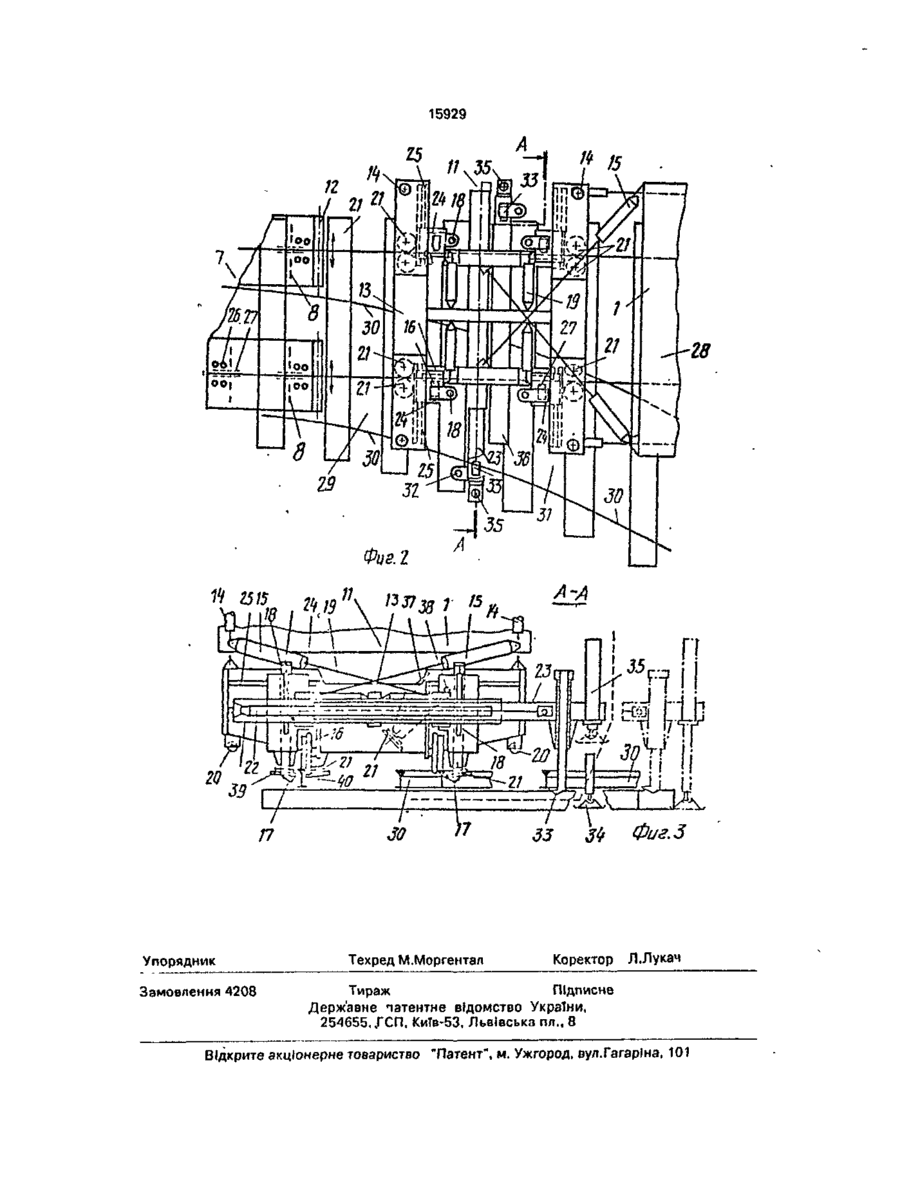
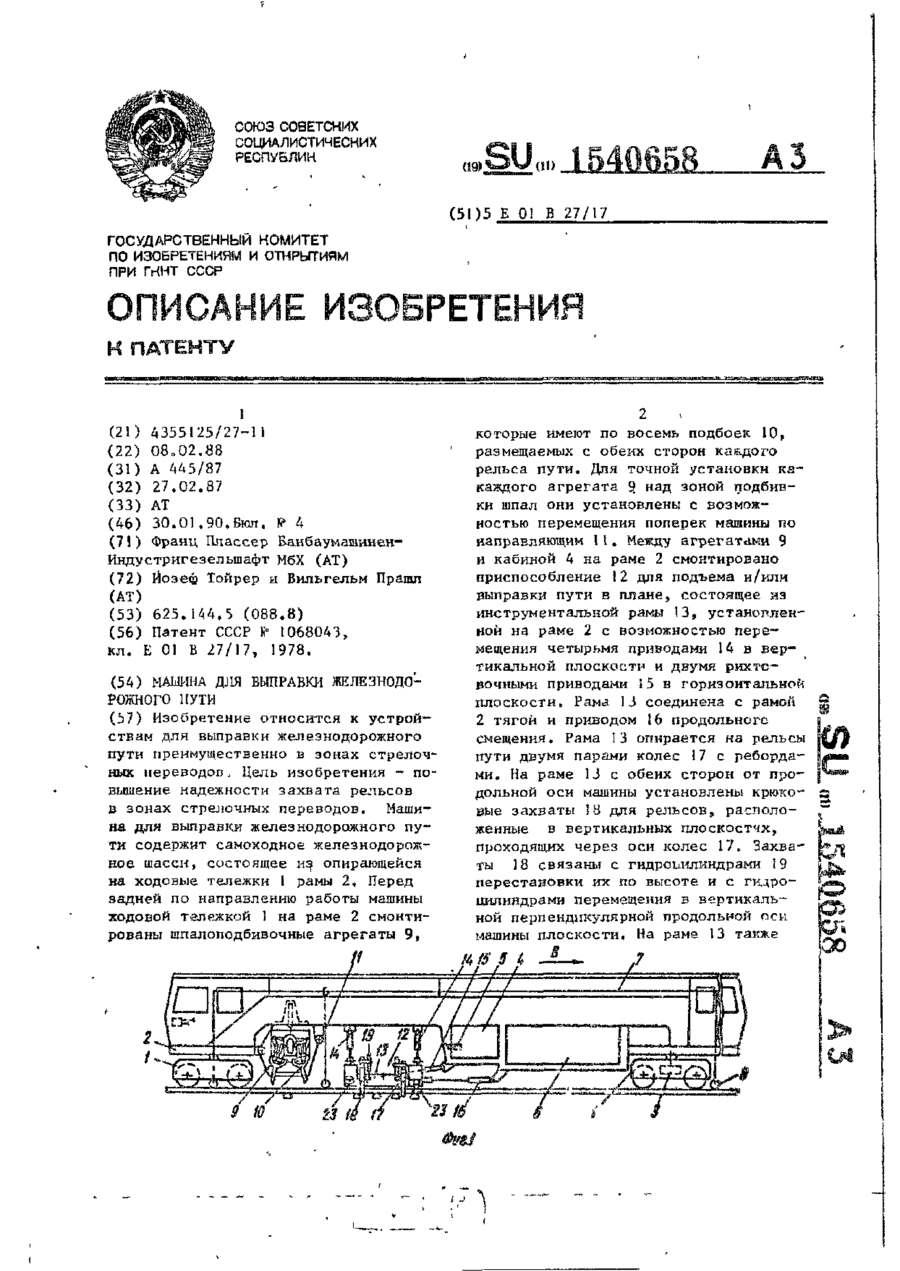
Подвижная шпалоподбивочная, подъемная и рихтовочная машина, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней шпалоподбивочный агрегат и лодъемно-рихтовочныйагрегат, расположенный перед шпалоподбивочным агрегатом и состоящий из инструментальной рамы, установленной на раме машины с возможностью перемещения приводами в вертикальной плоскости и рихтовочными приводами в горизонтальной плоскости и соединенной с рамой машини тягой, двух пар колес с ребордами для опирання инструментальной рамы на рельсы, крюковых захватов для рельсов, расположенных в пертикальиих плоскостях, проходящих через оси указанных колес и установленных на инструментальной раме с обеих сторон от продольной плоскости симметрии машины с возможностью перестановки по высоте и перемещения в вертикальной, перпендикулярной указанной плоскости симметрия машины плоскости автономными гидроцилиндрами, и роликовых звхватоа для рельсов, установленных с обеих сторон от продольной плоскости симметрии машины и перед и сзади указанных двух пар колес, а также эталонную систему измерения и телескопическую перемещаемую гюперек машины гидроцилиндром консольную балку, на свободном конце которой закреплены перемещаемые по высоте приподами захват для рельса и опорный башмак, о т л и ч а ю щ а я с я тем, что указанная консольная балка установлена нз инструментальной раме между парами колес с ребордами. С о го ю О Изобретение относится к устройствам для ремонта железнодорожного пути. Цель изобретения - расширение функциональных возможностей машины путем обеспечения рихтовки стрелочных переводов. На фиг. 1 изображена частично подвижная шпалоподбивочная, подъемная и рихтовочная машина, общий вид; на фиг. 2 подъемно-рихтовочный агрегат, план; на фиг. 3 - разрез А-А фиг. 2. Подвижная шпалогюдбивочиая, подъемная и рихтовочная машина содержит раму 1, опирающуюся на ходовые тележки 2 с приводом 3 перемещения по железнодорожному пути. На раме 1 смонтированы рабочая кабина 4 с блоком 5 управления, энергетическая силовая установка 6 дня питания различных приводоо, шпалоподби 15929 вочный агрегат 7. в котором для каждого рельса пути имеется восемь подбоек 8, эталонная система измерения положения пути, включающая в себя взаимодействующие с рельсами контактные ролики 9 и базовую 5 прямую 10 отсчета, и подъемно-рихтовочный агрегат 11, расположенный перед агрегатом 7 по направлению А работы машины. Для точной ориентации подбоек 8 агрегата 7 относительно подбиваемых шпал о 10 зонах стрелочных переводов агрегат 7 установлен на поперечных направляющих 12, закрепленных на раме машины с возможностью перемещения поперек машины по этим направляющим 12. 15 Агрегат 11 состоит из инструментальной рамы 13, установленной на раме 1 с возможностью перемещения четырьмя гидроцилиндрами 14 в вертикальной плоскости и двумя рихтовочными гидроцилиндрами 15 20 с горизонтальной плоскости, двух пар колес 16 с ребордами для опирання рамы 13 на рельсы, крюковых захватов 17 для рельсов, расположенных в вертикальных плоскостях, проходящих через оси колес 16 и установ- 25 ленных на раме 13 с обеих сторон от продольной плоскости симметрии машины с возможностью перестановки по высоте приводами 18 и перемещения о вертикальной, перпендикулярной этой плоскости симмет- 30 рии машины плоскости автономными гидроцилиндрами 19. Рама 13 соединена с рамой 1 при помощи тяг-гидроцилиндров 20 продольного смещения. На раме 13 с обеих сторон от 35 продольной плоскости симметрии машины установлены роликовые захваты 21 для рельсов, расположенные перед колесами 16 одной пары и сзади колес 16 другой. На раме 13 также установлена телескопическая 40 перемещаемая поперек машины гидроцилиндром 22 консольная балка 23, расположенная между парами колес 16 с ребордами. Крюковые захваты 17 расположены вдоль машины на расстоянии друг от 45 друга, преимущественно соответствующем двойному расстоянию между осями симметрии двух смежных шпэльных ящиков. Для поперечного перемещения крюковых захватов 17 они имеют опору для пере- 50 становки по высоте в направляющем блоке 24, который имеет опору для направляющих 25, по которым гидроцилиндрами 19 перемещаются захваты 17. Как видно из схематического изображе- 55 ния слева на фиг. 2 обоих шпалоподбивочных агрегатов 7 подбойки 8 связаны с приводом 26 поворота их. Благодаря им подбойки 8 расположены с возможностью бокового отклонения вокруг проходящей в продольном направлении машины поворотной оси 27 поперек пути независимо друг от друга, для того, чтобы можно было в каждом конкретном случае уклоняться от имеющихся на сложном участке стрелки или скрещипания пути препятствий, например, контррельсов, крестовин и т.п. На увеличенном виде сверху на фиг. 2 ответвляется от образованного рельсами и шпалами главного пути 28 боковой путь 29, который состоит из рельсов 30 и более длинных на этом участке шпал-брусьев. Сбоку от машины или, как видно на этом чертеже, ниже пути 28 находится образованный боковым путем 29 (на виде сверху на фиг. 2 показанный \\\лже или рядом с путей 28), расширенный учзсток стрелки или скрещивания пути 31. Расположенная для поднятия одного рельса 30 этого участка пути 31 на инструментальной раме 13 балка 23 имеет на выдвигаемом внешнем конце перемещаемых приводом 32 по высоте захват для рельса, образованный крюком 33, и опорный башмак 34, перемещаемый по высоте приводом 35. Представленный па фиг. 2 и 3 крюк 33 находится в выдвинутом и опущенном положении и захватывает снизу подошву нижнего рельса 30. Таким образом для предусмотренного процесса подъема луги на этом тяжелом участке со стрелочным переводом обеспечивается подхват в целом четырьмя крюковыми захватами 17 обоих рельсов пути 28 и одним крюком 33 нижнего рельса 30 за подошву рельсоп, а также двумя нарами роликовых захватов 21 за головку рельса одного из рельсов пути 28 и одной парой роликовых захватов 21 и одним роликом захватов 21 за головку нижнего на этом чертеже рельса пути 28. На инструментальной раме 13 закреплена еще одна телескопическая консольная балка 36, выполненная аналогично балке 23, но перемещаемый конец балки 36 расположен с другой стороны рамы 1 машины, что обеспечивает захват стрелочного перевода по всей его ширине, когда боковой путь направлен о противоположную от пути 29 сторону. Каждый ролик захватов 21 для рельсов. установлен на опоре, которая приводом 37 поворачивается о поперечном направлении вокруг оси 38. На нижней поверхности каждого ролика захватов 21 выполнен подъемный диск 39, вращающийся вокруг оси 40, расположенной в вертикальной плоскости. Длина каждого крюкового захвата 17 подобрана таким образом, чтобы им можно было захватить как головку, так и подошву рельса. 15929 Машина работает следующим образом. Машина в рабочем режиме управляется находящимся в рабочей кабине 4 оператором с помощью блока 5 управления. Как только машина выдвигается в начальную зо- 5 ну участка стрелочного перевода (см. фиг. 2), производится откидывание вверх находящихся над боковым путем 29 роликовых захватов 21, которые расположены (см. один из откинутых вверх подъемных роликов 25) 10 на нижнем рельсе пути 28. Все четыре захвата 17 могут прикладываться к внешней стороне главного пути 28 и смещаются под воздействием гидроцилиндров 19 поперечного смещения вдоль направляющих 25 на- 15 ружу до тех пор, пока не будет обеспечен контакт с геометрическим замыканием крюкового захвата 17 с рельсом главного пути 28. После этого или одновременно с этим балка 23 на участке бокового пути 29 с по- 20 мощью гидроцилиндра 22 смещается наружу до тех пор, пока захватный крюк 33 с помощью своего привода 32 регулирования по высоте не войдет в прилегающий контакт с наружным рельсом 30 в зоне между шпалами. 25 В этом положении с помощью своего привода 35 опорный башмак 34 упирается в балласт между шпалами. В представленном на фиг. 2 положении показан очень тяжелый стрелочный перевод с тяжелыми железобе- 30 тонными шпалами, он подхватывается семью прикладываемыми к внешней или внутренней стороне рельса роликовыми захватами 21 и всеми пятью крюковыми захватами 17 или 33 и зажимается с 35 геометрическим замыканием в сочетании с четырьмя соответственно расположенными напротив крюков захватов 17 колесами 16 с ребордами. 7 8 3 Фиг I Посредством воздействия четырех гидроцилиндров 14 осуществляется подъем стрелки до тех пор, пока с помощью соседствующего с подъемно-рихтовочным агрегатом 11 контактного ролика 9 не будет найдено правильное по высоте положение по отношению к прямой 10 эталонной системы. Одновременно корректируются также погрешности рихтовки стрелки, посредством задействования двух рихтовочных гидроцилиндров 15 до тех пор, пока с помощью не описываемой более подробно рихтовочной эталонной системы не будет достигнуто правильное положение пути в плане. Как только этот участок стрелки и скрещения пути 31 в вышеописанной начальной зоне приводится в правильное положение по высоте и в плане, осуществляется подбивка расположенной между подбойками 8 поперечной шпалы. С помощью выполненной согласно изобретению машины могут также подниматься магистральные участки пути, производится их рихтовка и подбивка шпал, причем целесообразно зацепление только восьми роликов захватов 21. . Естественно, что в случае необходимости на магистральном участке пути могут использоваться также все четыре крюка захватов 17. В рамках данного изобретения балка 23 с крюком 33 пригодна также для машин, которые имеют подъемно-рихтовочный агрегат, оснащенный только одним для каждой рельсовой нити, захватом 17, так как с помощью дополнительного третьего выдвигаемого в боковом направлении захватного крюка 33 может быть достигнут ^олее надежный захват. 1T 16 20 15929 7 Упорядник Замовлення 4208 Техред М.Моргентал Коректор Л.Лукач Тираж Підписне Державне патентне відомство України, 254655, %ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMovable tie tamper, lifting and flattener machine
Назва патенту російськоюПодвижная шпалоподбивочная, подъемная и рихтовочная машина
МПК / Мітки
МПК: E01B 27/12
Мітки: машина, рихтувальна, рухома, підйомна, шпалопідбивальна
Код посилання
<a href="https://ua.patents.su/4-15929-rukhoma-shpalopidbivalna-pidjjomna-ta-rikhtuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Рухома шпалопідбивальна, підйомна та рихтувальна машина</a>
Рухома шпалопідбивальна машина

Номер патенту: 13455
Опубліковано: 28.02.1997
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: шпалопідбивальна, машина, рухома
Формула / Реферат:
1. Подвижная шпалоподбивочная машина, содержащая опирающуюся на ходовые тележки раму, две инструментальные рамы, установленные на раме машины с обеих сторон от продольной плоскости симметрии машины с возможностью поворота в горизонтальной плоскости, подъемно-рихтовочное устройство и расположенные за ним по направлению работы машины шпалоподбивочные агрегаты, размещаемые снаружи и внутри колеи, два из которых, размещаемые снаружи колеи,...
Рухома шпалопідбивальна машина

Номер патенту: 13384
Опубліковано: 28.02.1997
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: шпалопідбивальна, рухома, машина
Формула / Реферат:
(57) 1. Подвижная шпалоподбивочная машина, содержащая опирающуюся на ходовые тележки раму, две инструментальные рамы, установленные на раме машины с обеих сторон от продольной плоскости симметрии машины с возможностью поворота в горизонтальной плоскости, и шпалоподбивочные агрегаты, установленные на инструментальных рамах с возможностью перестановки по высоте приводами и включающие в себя подбивочные инструменты, отличающаяся тем, что каждая...
Пересувна шпалопідбивальна та виправочна машина
Номер патенту: 13196
Опубліковано: 28.02.1997
Автори: Йозеф Тойрер, Вільгельм Прашл, Фрідріх Пайтль
МПК: E01B 27/17
Мітки: шпалопідбивальна, машина, виправочна, пересувна
Формула / Реферат:
(57)1. Передвижная шпалoподбивочная ивыправочная машина, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней шпалоподбивочный агрегат, устройство для подъема находящегося сбоку машины участка стрелочного перевода, включающее в себя телескопическую балку с приводом, расположенную поперек машины, и захватный орган дпя рельса, установленный на одном конце балки с возможностью лерестановки по высоте приводом, и...
Машина для виправки залізничної колії
Номер патенту: 4781
Опубліковано: 28.12.1994
Автори: Йозеф Тойрер, Вільгельм Прашл
МПК: E01B 27/17
Мітки: виправки, залізничної, колії, машина
Формула / Реферат:
1. Машина для выправки железнодорожного пути, содержащее самоходное железнодорожное шасси, приспособление для подъема и/или выправки пути в плане в зонах стрелочных переводов, состоящее из инструментальной рамы, установленной на раме шасси с возможностью перемещения двумя приводами в вертикальной плоскости и двумя рихтовочными приводами в горизонтальной плоскости и соединенной с рамой шасси тягой, одной пары колес с ребордами для опирания...
Шпалопідбивальна машина

Номер патенту: 12805
Опубліковано: 28.02.1997
Автор: Чєзарє Россаніго
МПК: E01B 27/16
Мітки: машина, шпалопідбивальна
Формула / Реферат:
(57) 1. Шпалоподбивочная машина, содержащая опирающуюся на ходовые тележки раму, по меньшей мере, один шпалоподбивочный агрегат, установленный на раме с возможностью перемещения в вертикальной плоскости гидроцилиндром и состоящий из несущей рамы, по меньшей мере одной пары шпалоподбоек, шарнирно закрепленных на несущей раме с возможностью поворота в вертикальной плоскости гидроцилиндрами и соединенных с виброприводом, отличающаяся тем, что...