Пристрій для суміщення вузла перевантажування консолей конвейєрного комплексу
Номер патенту: 16506
Опубліковано: 29.08.1997
Автори: Олейник Сергій Леонідович, Самохвалов Володимир Костянтинович, Макаров Віктор Михайлович, Сорока Георгій Митрофанович, Ганин Михайло Павлович
Формула / Реферат
Устройство для совмещения узла перегрузки консолей конвейерного комплекса, включающее следящую систему пунктов перегрузки, размещенных на разгрузочной и приемной консолях, и систему управления приводами консолей, отличающееся тем, что, с целью повышения производительности путем уменьшения просыпей в месте перегрузки грунта и сокращения времени на совмещение узлов перегрузки, следящая система выполнена в виде связанных между собой гибким элементом и жесткой тягой двухстепенного шарнира, размещенного на одной из консолей в месте перегрузки грунта, и лебедки, размещенной на другой консоли, при этом последняя снабжена размещенной на ней полой и кинематически связанной с системой управления приводами осью, на которой установлена с возможностью поворота в вертикальной и горизонтальной плоскостях жесткая тяга, а гибкий элемент размещен в полой оси, кинематически связанной с системой управления приводами, и закреплен на барабане лебедки.
Текст
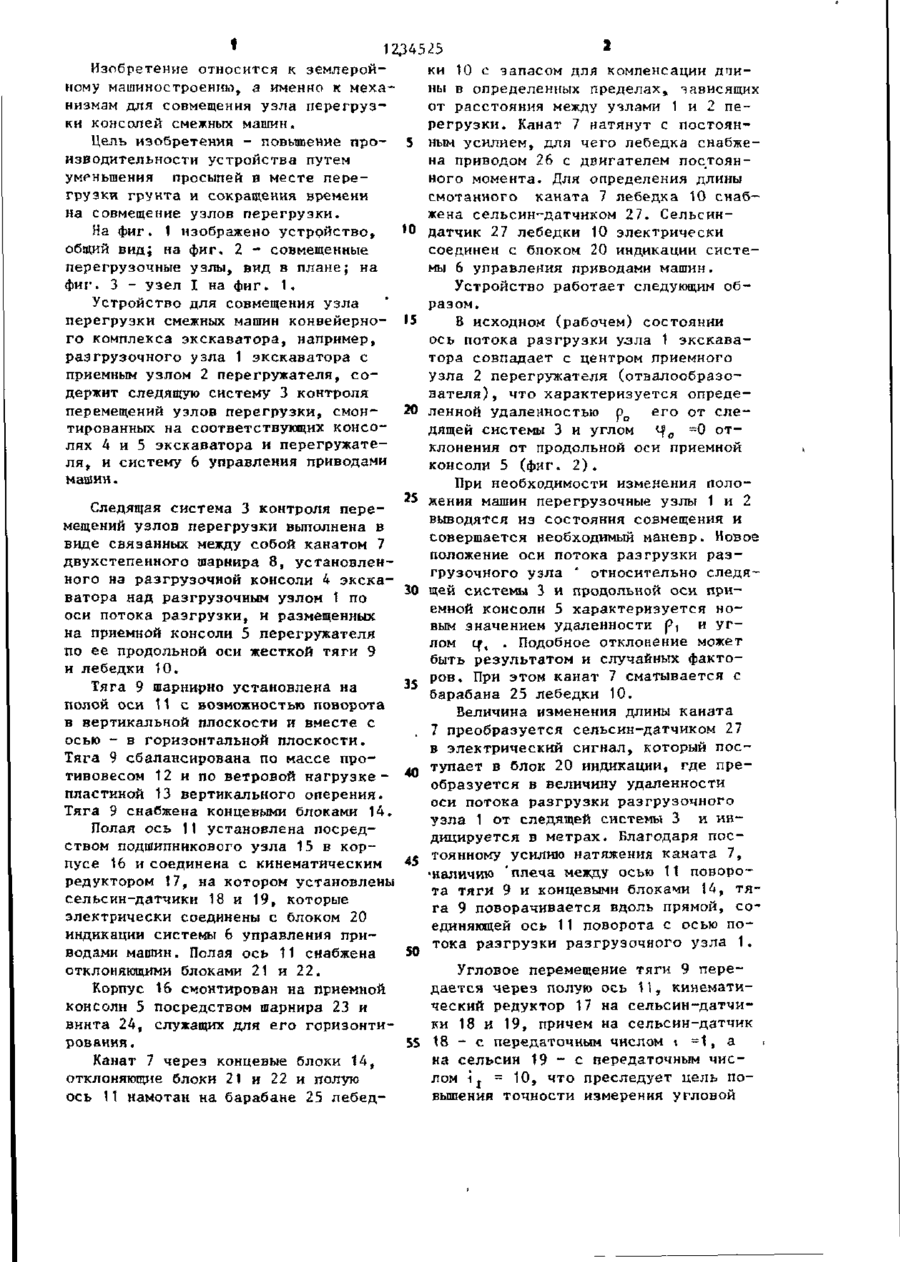
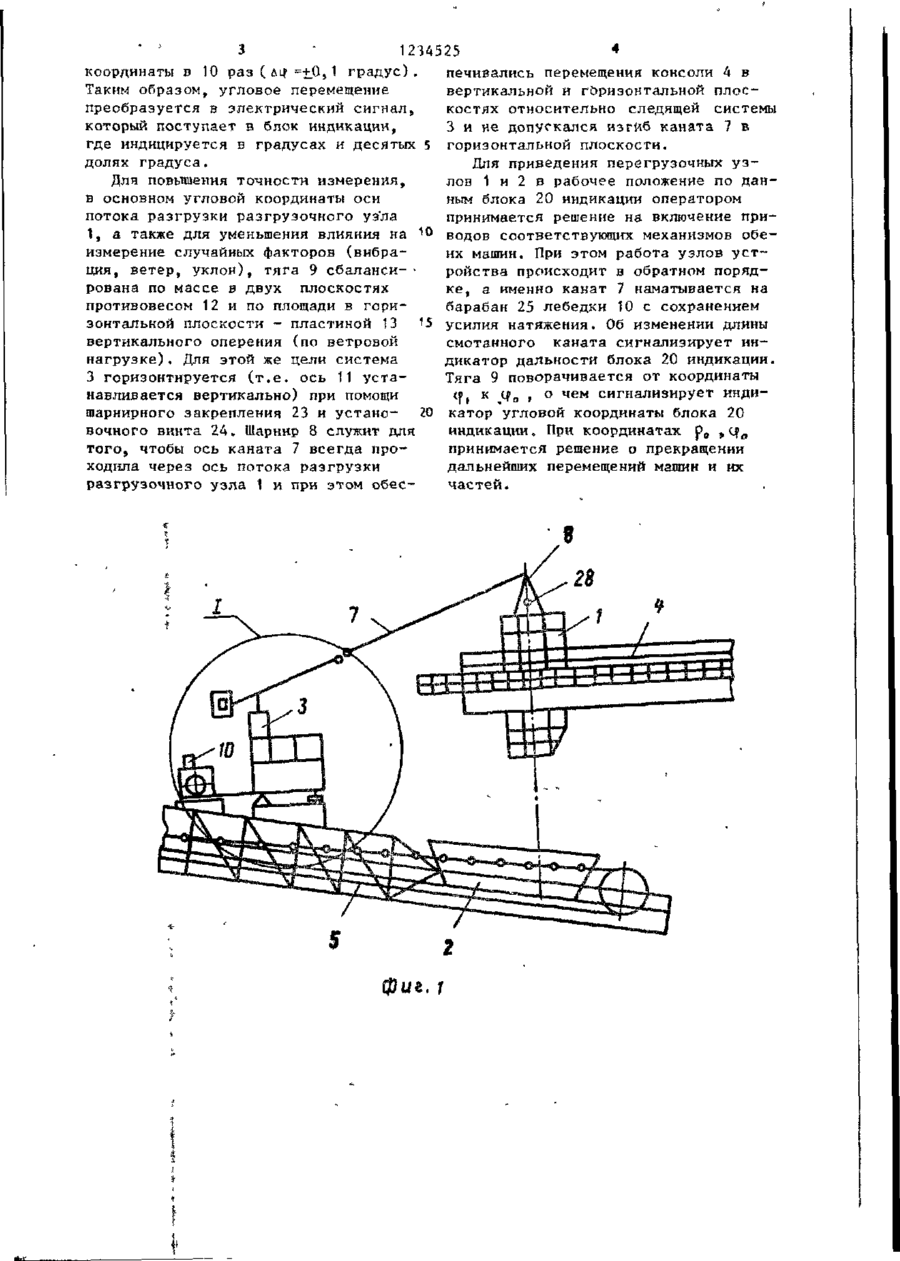
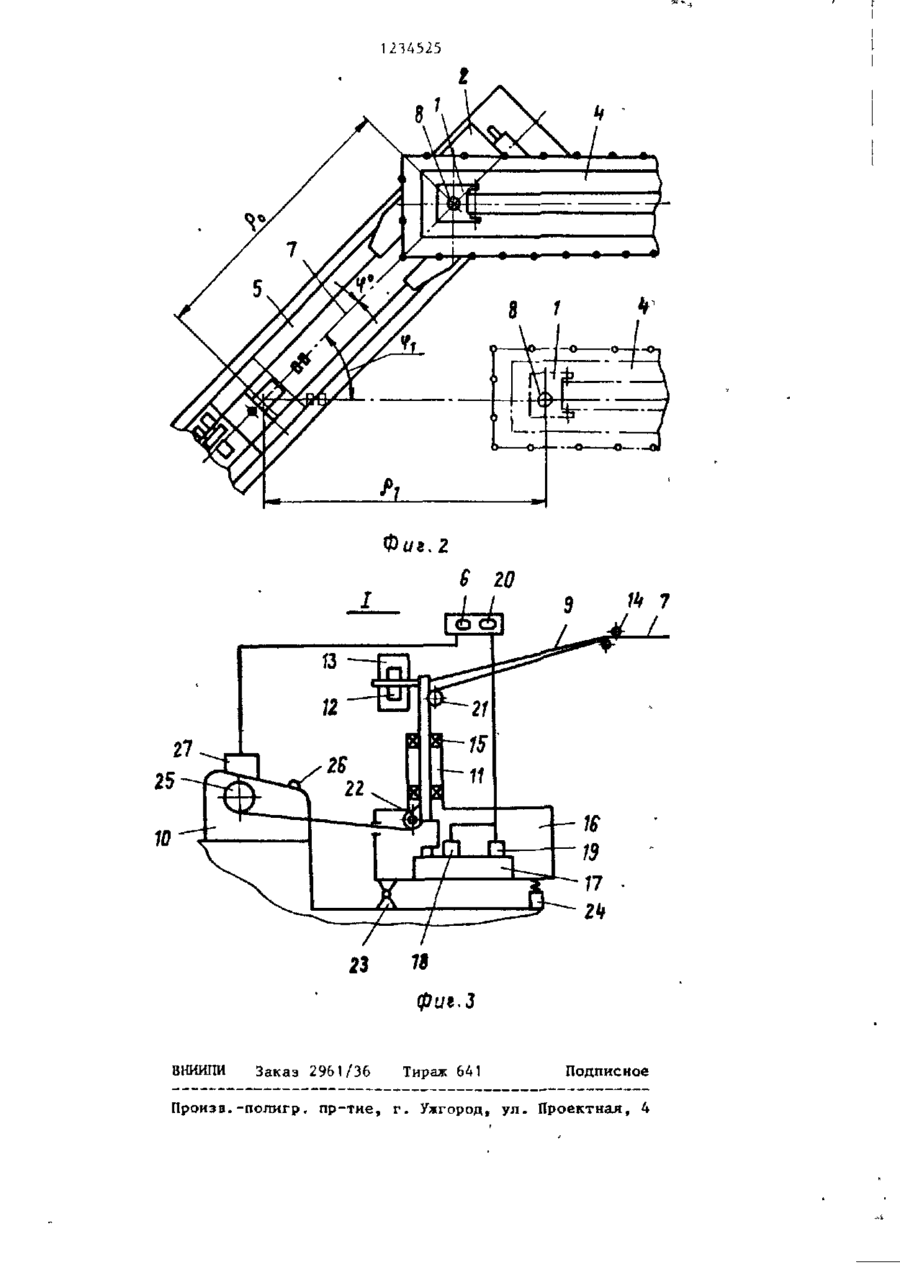
УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ УЗЛА ПЕРЕГРУЗКИ КОНСОЛЕЙ КОНВЕЙЕРНОГО КОМПЛЕКСА, включающее следящую систему пунктов перегрузки, размещенных на разгрузочной и приемной консолях, и систему управления приводами консолей, о т л и ч а ю щ е е с я тем, что, с целью повышения производительности путем уменьшения просыпей в месте перегрузки грунта и сокращения времени на совмещение узлов перегрузки, следящая система выполнена в виде связанных между собой гибким элементом и жесткой тягой двухстепенного шарнира, размещенного на одной из консолей в месте перегрузки грунта, и лебедки, размещенной на другой консоли, при этом последняя снабжена размещенной на ней полой и кинематически связанной с системой управления приводами осью, на которой установлена с возможностью поворота в вертикальной и горизонтальной плоскостях жесткая тяга, а гибкий элемент размещен в полой оси, кинематически связанной с системой управления приводами, и закреплен на барабане лебедки. 1234525 Изобретение относится к землеройки 10 с запасом для компенсации дггиному машиностроению, а именно к механы в определенных пределах, зависящих низмам для совмещения узла перегрузот расстояния между узлами 1 и 2 пеки консолей смежных машин. регрузки. Канат 7 натянут с постоянІіель изобретения - повышение про- 5 ным усилием, для чего лебедка снабжена приводом 26 с двигателем постоянизводитєльности устройства путем ного момента. Для определения длины уменьшения просыпей в месте пересмотанного каната 7 лебедка 10 снабгрузки грунта и сокращения времени жена сельсин-датчиком 27. Сельсинна совмещение узлов перегрузки. На фиг. 1 изображено устройство, *° датчик 27 лебедки 10 электрически соединен с блоком 20 индикации систеобщий вид; на фиг. 2 - совмещенные мы 6 управления приводами машин. перегрузочные узлы, вид в плане; на фиг. 3 - узел I на фиг. 1. Устройство работает следующим обУстройство для совмещения узла разом. перегрузки смежных машин конвейерно- 15 В исходном (рабочем) состоянии го комплекса экскаватора, например, ось потока разгрузки узла 1 экскаваразгрузочного узла 1 экскаватора с тора совпадает с центром приемного приемным узлом 2 перегружателя, соузла 2 перегружателя (отвалообразодержит следящую систему 3 контроля вателя), что характеризуется опредеперемещений узлов перегрузки, смон20 ленной удаленностью р о его от слетированных на соответствующих консодящей системы 3 и углом уо =0 отлях А и 5 экскаватора и перегружатеклонения от продольной оси приемной ля, и систему 6 управления приводами консоли 5 (фиг. 2 ) . машин. При необходимости изменения поло25 жения машин перегрузочные узлы 1 и 2 Следящая система 3 контроля перевыводятся из состояния совмещения и мещений узлов перегрузки выполнена в совершается необходимый маневр. Новое виде связанных между собой канатом 7 положение оси потока разгрузки раздвухстепенного шарнира 8, установленгрузочного узла * относительно следяного на разгрузочной консоли 4 экска30 щей системы 3 и продольной оси приватора над разгрузочным узлом 1 по емной консоли 5 характеризуется нооси потока разгрузки, и размещенных вым значением удаленности р, и угна приемной консоли 5 перегружателя лом q\ . Подобное отклонение может по ее продольной оси жесткой тяги 9 быть результатом и случайных фактон лебедки 10. ров. При этом канат 7 сматывается с Тяга 9 шарнирно установлена на 35 барабана 25 лебедки 10. полой оси 1 1 с возможностью поворота Величина изменения длины каната в вертикальной плоскости и вместе с 7 преобразуется сельсин-датчиком 27 осью - в горизонтальной плоскости. в электрический сигнал, который посТяга 9 сбалансирована по массе протупает в блок 20 индикации, где претивовесом 12 и по ветровой нагрузке- 40 образуется в величину удаленности пластиной 13 вертикального оперения. оси потока разгрузки разгрузочного Тяга 9 снабжена концевыми блоками 14. узла 1 от следящей системы 3 и инПолая ось 11 установлена посреддицируется в метрах. Благодаря посством подшипникового узла 15 в кортоянному усилию натяжения каната 7, пусе 16 и соединена с кинематическим 45 •наличию 'плеча между осью 11 повороредуктором 17, на котором установлены та тяги 9 и концевыми блоками 14, тясельсин-датчики 18 и 19, которые га 9 поворачивается вдоль прямой, соэлектрически соединены с блоком 20 единяющей ось 11 поворота с осью поиндикации системы 6 управления притока разгрузки разгрузочного узла 1. водами машин. Полая ось 11 снабжена 50 Угловое перемещение тяги 9 переотклоняющими блоками 21 и 22. дается через полую ось 11, кинематиКорпус 16 смонтирован на приемной ческий редуктор 17 насельсин-датчиконсоли 5 посредством шарнира 23 и ки 18 и 19, причем на сельсин-датчик винта 24, служащих для его горизонтирования. 55 18 - с передаточным числом і =1, а на сельсин 19 - с передаточным чисКанат 7 через концевые блоки 14, лом ij = 10, что преследует цель поотклоняющие блоки 21 и 22 и полую вышения точности измерения угловой ось 11 намотан на барабане 25 лебед 1234525 координаты в 10 раз ( л i =+.0,1 градус). печивались перемещения консоли 4 в f Таким образом, угловое перемещение вертикальной и горизонтальной плоспреобразуется в электрический сигнал, костях относительно следящей системы который поступает в блок индикации, 3 и ие допускался изгиб каната 7 в где индицируется в градусах и десятых 5 горизонтальной плоскости. долях градуса. Для приведения перегрузочных узДля повышения точности измерения, лов 1 и 2 в рабочее положение по данв основном угловой координаты оси ным блока 20 индикации оператором потока разгрузки разгрузочного узла принимается решение на включение при1, а также для уменьшения влияния на 10 водов соответствующих механизмов обеизмерение случайных факторов (вибраих машин. При этом работа узлов устция, ветер, уклон), тяга 9 сбаланси- ройства происходит в обратном порядрована по массе в двух плоскостях ке, а именно канат 7 наматывается на противовесом 12 и по площади в горибарабан 25 лебедки 10 с сохранением зонтальной плоскости - пластиной 13 усилия натяжения. Об изменении длины вертикального оперения (по ветровой смотанного каната сигнализирует иннагрузке). Для этой же цели система дикатор дальности блока 20 индикации. 3 горизонтируется (т.е. ось 11 устаТяга 9 поворачивается от координаты навливается вертикально) при помощи
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for matching reload unit of conveyor complex jibs
Автори англійськоюSoroka Heorhii Mytrofanovych, Makarov Viktor Mykhailovych, Samokhvalov Volodymyr Kostiantynovych, Oleinyk Serhii Leonidovych, Hanin Mykhailo Pavlovych
Назва патенту російськоюУстройство для совмещения узла перегрузки консолей конвейерного комплекса
Автори російськоюСорока Георгий Митрофанович, Макаров Виктор Михайлович, Самохвалов Владимир Константинович, Олейник Сергей Леонидович, Ганин Михаил Павлович
МПК / Мітки
МПК: E02F 3/18
Мітки: перевантажування, конвейєрного, комплексу, вузла, пристрій, суміщення, консолей
Код посилання
<a href="https://ua.patents.su/4-16506-pristrijj-dlya-sumishhennya-vuzla-perevantazhuvannya-konsolejj-konvejjehrnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для суміщення вузла перевантажування консолей конвейєрного комплексу</a>
Опора конвейєрного моста

Номер патенту: 13544
Опубліковано: 25.04.1997
Автори: Кочергін Борис Михайлович, Харамєєва Наталія Олександрівна
МПК: E02F 9/08
Мітки: конвейєрного, моста, опора
Формула / Реферат:
Опора конвейерного моста, включающая двухгусеничную ходовую тележку, содержащую раму, соединенную с продольными балками гусениц плоскими шарнирами, маятниковую балку, связанную с рамой плоскими, а с продольными балками гусениц - шаровыми шарнирами, и жестко соединенную с рамой вертикальную стойку с кареткой, отличающаяся тем, что, с целью упрощения конструкции, снижения металлоемкости и улучшения условий технического обслуживания,...
Спосіб збірки шпиндельного вузла

Номер патенту: 6234
Опубліковано: 29.12.1994
Автори: Хомутов Семен Михайлович, Капітельман Леонід Вільямович, Гольдрайх Генріх Максович, Неміровська Марія Іванівна
МПК: B23P 11/02
Мітки: шпиндельного, збірки, вузла, спосіб
Формула / Реферат:
Способ оборки шпиндельного узла на подшипниковых опорах качения с предварительным осевым натягом, заключающийся в измерении внутренних и наружных диаметров подшипников и сортировке их по размерам, измерении посадочных поверхностей шпинделя и корпуса на передней и задней опорах и установке комплекта подшипников на упомянутые поверхности передней и задней опор, отличающийся тем, что, с целью повышения точности и долговечности полученного...
Спосіб обслуговування відсічного вузла шихтового тракту засипного апарату доменної печі та пристрій для його втілення
Номер патенту: 4976
Опубліковано: 28.12.1994
Автори: Пеклич Михайло Михайлович, Кленін Сергій Михайлович, Апостолов Володимир Гнатович, Лапітан Євген Анатольєвич, Ратнер Юлій Залманович, Кравченко Анатолій Петрович
МПК: C21B 7/18
Мітки: печі, засипного, втілення, обслуговування, шихтового, пристрій, відсічного, тракту, спосіб, апарату, доменної, вузла
Формула / Реферат:
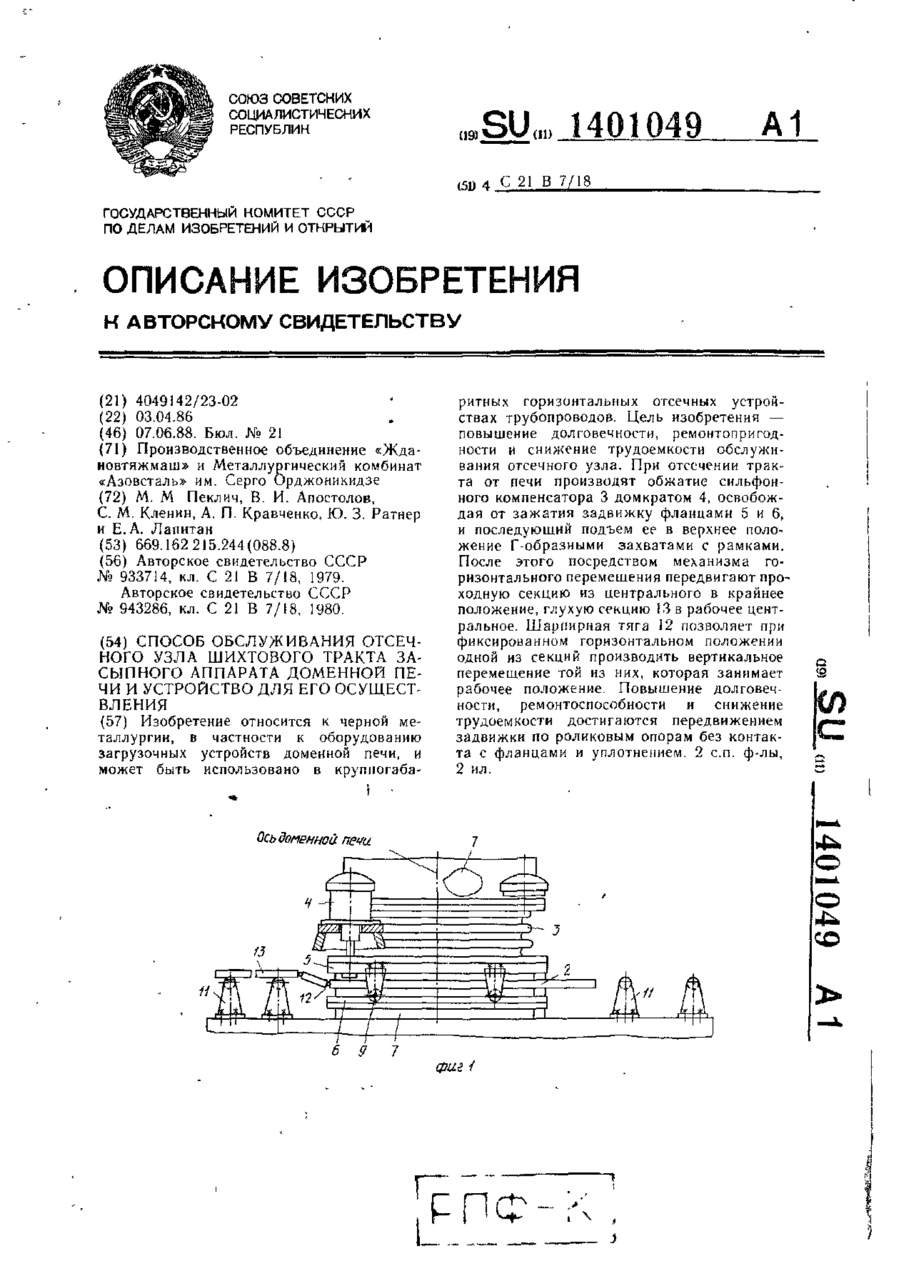
1. Способ обслуживания отсечного узла шихтового тракта засыпного аппарата доменной печи, включающий горизонтальное перемещение задвижки относительно уплотняющих фланцев, отличающийся тем, что, с целью повышения долговечности, ремонтоспособности и снижения трудоемкости обслуживания, задвижку перед горизонтальным передвижением перемещают в вертикальном направлении. 2.Устройство обслуживания отсечного узла шихтового тракта засыпного...
Відвалоутворювач
Номер патенту: 4006
Опубліковано: 27.12.1994
Автори: Макаров Віктор Михайлович, Копилова Ольга Панкратіївна, Сорока Георгій Митрофанович
МПК: E21C 47/00
Мітки: відвалоутворювач
Формула / Реферат:
Отвалообразователь, включающий расположенную на ходовом оборудовании поворотную платформу с надстройкой, на которой шарнирно установлены приемная и разгрузочная консоли с ленточным конвейером и механизмами их подъема, отличающийся тем, что, с целью снижения металлоемкости и энергозатрат, приемная и разгрузочная консоли соединены между собой посредством шарнира и одним из механизмов подъема, а второй механизм подъема соединен с одной из...
Ущільнення шпиндельного вузла

Номер патенту: 6232
Опубліковано: 29.12.1994
Автори: Капітельман Леонід Вільямович, Плісс Анатолій Михайлович, Неміровська Марія Іванівна, Хомутов Семен Михайлович, Люцин Ілля Самуілович
МПК: F16J 15/44
Мітки: шпиндельного, вузла, ущільнення
Формула / Реферат:
Уплотнение шпиндельного узла, содержащее отбойное кольцо, установленное с образованием наружной радиальной щели между ним и подшипниковой крышкой, отличающееся тем, что, с целью повышения надежности уплотнения, на шпинделе выполнен фланец, на котором установлено с возможностью перемещения отбойное кольцо, выполненное с выступом, на наружной поверхности которого имеется кольцевая проточка, при этом в подшипниковой крышке выполнена...
Попередній патент: Пристрій для формування імпульсів керування тиристорами
Наступний патент: Спосіб виготовлення польових транзисторів з бар’єром шотткі
Випадковий патент: Спосіб виготовлення і фіксації штифтового зуба