Механічна передача
Номер патенту: 17596
Опубліковано: 06.05.1997
Автори: Надєїн Владислав Семенович, Кириченко Андрій Миколайович, Крижанівський Володимир Андрійович, Лебедєв Юрій Васильович
Формула / Реферат
1. Механическая передача, содержащая корпус, входное и выходное звенья, храповое колесо и второе колесо, снабженное установленными упруго пластинами, взаимодействующими с выступами храпового колеса и образующими внутреннее зацепление колес, отличающейся тем, что колеса расположены несоосно, с величиной взаимного эксцентриситета, превышающей отношение радиуса храпового колеса к числу его зубьев.
2. Механическая передача по п.1, отличающаяся тем, что снабжена механизмом изменения величины взаимного эксцентриситета охватывающего и внутреннего колес.
3. Механическая передача по пп.1 и 2, отличающаяся тем, что охватывающее колесо соединено со входным звеном, а внутреннее колесо соединено с выходным звеном передачи.
4. Механическая передача по пп.1 и 2, отличающаяся тем, что одно колесо свободно установлено на водиле, связанном со входным звеном привода, и соединено с выходным звеном, а второе колесо зафиксировано от вращения относительно корпуса.
5. Механическая передача по пп.1 и 2, отличающаяся тем, что одно колесо свободно установлено на водиле, связанном со входным звеном привода и зафиксировано от вращения относительно корпуса, а второе колесо соединено с выходным звеном.
6. Механическая передача по пп.1 - 5, отличающаяся тем, что снабжена промежуточным элементом, размещенным в проточке храпового колеса, и взаимодействующим с пластинами второго колеса в направлении, противоположном направлению эксцентриситета.
Текст
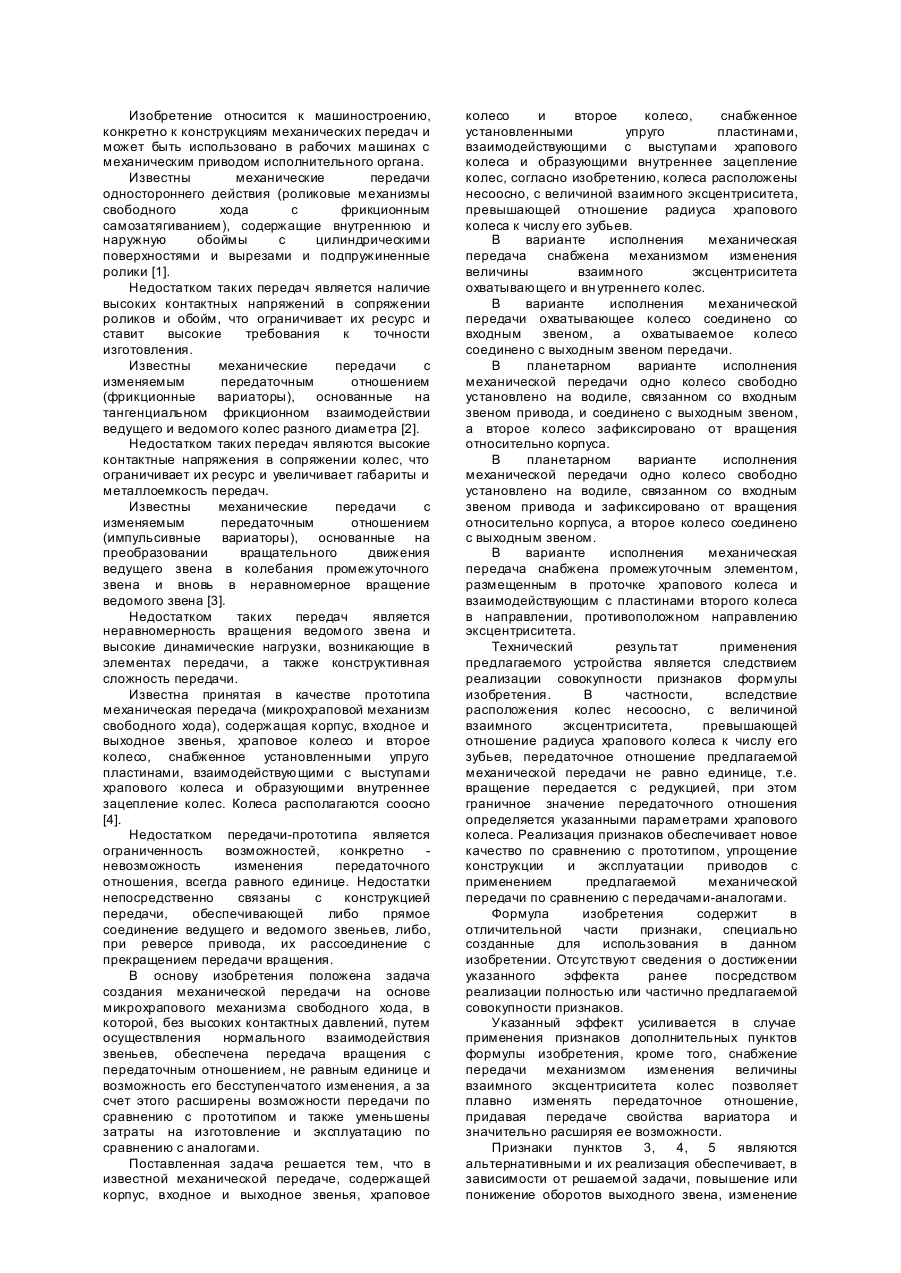
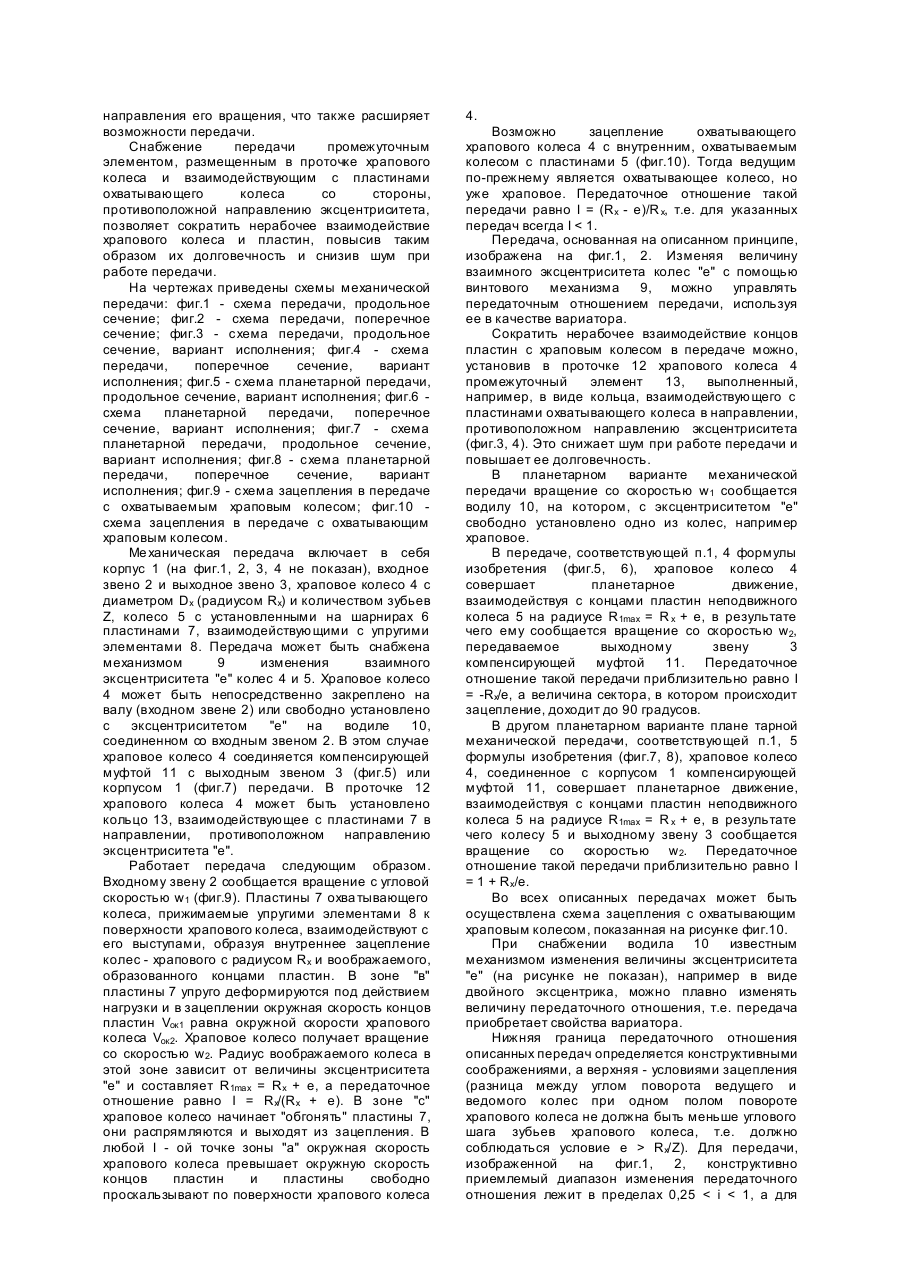
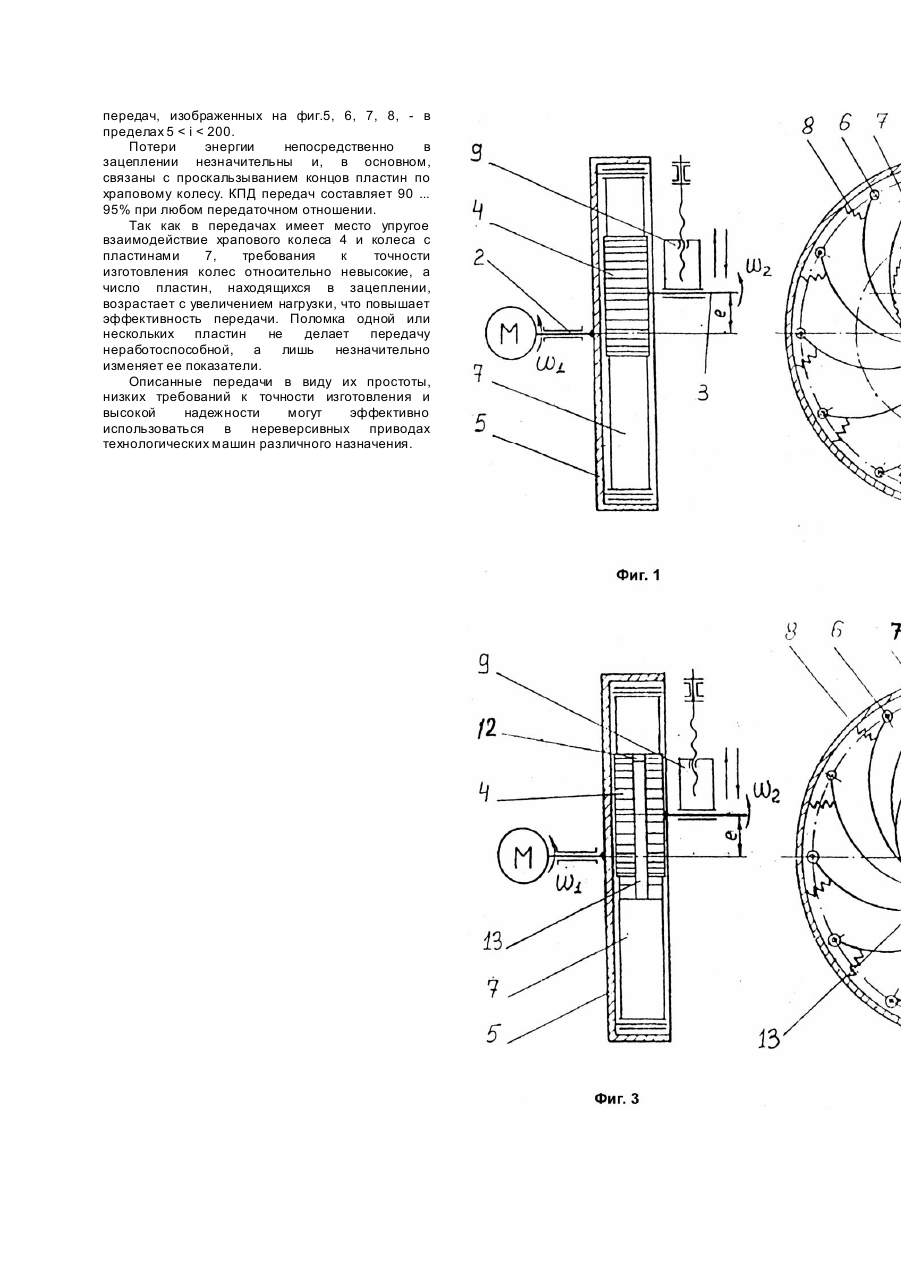
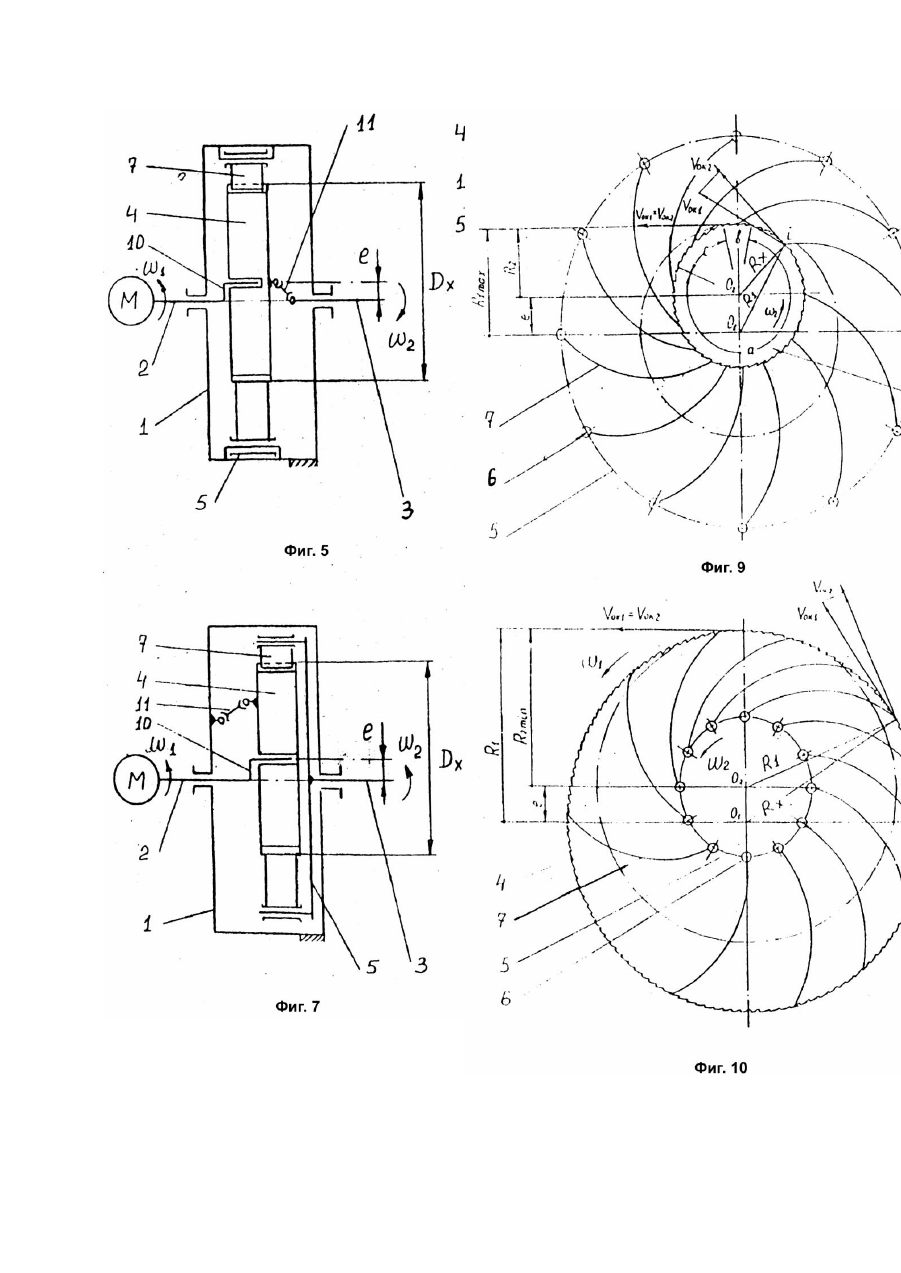
Изобретение относится к машиностроению, конкретно к конструкциям механических передач и может быть использовано в рабочих машинах с механическим приводом исполнительного органа. Известны механические передачи одностороннего действия (роликовые механизмы свободного хода с фрикционным самозатягиванием), содержащие внутреннюю и наружную обоймы с цилиндрическими поверхностями и вырезами и подпружиненные ролики [1]. Недостатком таких передач является наличие высоких контактных напряжений в сопряжении роликов и обойм, что ограничивает их ресурс и ставит высокие требования к точности изготовления. Известны механические передачи с изменяемым передаточным отношением (фрикционные вариаторы), основанные на тангенциальном фрикционном взаимодействии ведущего и ведомого колес разного диаметра [2]. Недостатком таких передач являются высокие контактные напряжения в сопряжении колес, что ограничивает их ресурс и увеличивает габариты и металлоемкость передач. Известны механические передачи с изменяемым передаточным отношением (импульсивные вариаторы), основанные на преобразовании вращательного движения ведущего звена в колебания промежуточного звена и вновь в неравномерное вращение ведомого звена [3]. Недостатком таких передач является неравномерность вращения ведомого звена и высокие динамические нагрузки, возникающие в элементах передачи, а также конструктивная сложность передачи. Известна принятая в качестве прототипа механическая передача (микрохраповой механизм свободного хода), содержащая корпус, входное и выходное звенья, храповое колесо и второе колесо, снабженное установленными упруго пластинами, взаимодействующими с выступами храпового колеса и образующими внутреннее зацепление колес. Колеса располагаются соосно [4]. Недостатком передачи-прототипа является ограниченность возможностей, конкретно невозможность изменения передаточного отношения, всегда равного единице. Недостатки непосредственно связаны с конструкцией передачи, обеспечивающей либо прямое соединение ведущего и ведомого звеньев, либо, при реверсе привода, их рассоединение с прекращением передачи вращения. В основу изобретения положена задача создания механической передачи на основе микрохрапового механизма свободного хода, в которой, без высоких контактных давлений, путем осуществления нормального взаимодействия звеньев, обеспечена передача вращения с передаточным отношением, не равным единице и возможность его бесступенчатого изменения, а за счет этого расширены возможности передачи по сравнению с прототипом и также уменьшены затраты на изготовление и эксплуатацию по сравнению с аналогами. Поставленная задача решается тем, что в известной механической передаче, содержащей корпус, входное и выходное звенья, храповое колесо и второе колесо, снабженное установленными упруго пластинами, взаимодействующими с выступами храпового колеса и образующими внутреннее зацепление колес, согласно изобретению, колеса расположены несоосно, с величиной взаимного эксцентриситета, превышающей отношение радиуса храпового колеса к числу его зубьев. В варианте исполнения механическая передача снабжена механизмом изменения величины взаимного эксцентриситета охватывающего и вн утреннего колес. В варианте исполнения механической передачи охватывающее колесо соединено со входным звеном, а охватываемое колесо соединено с выходным звеном передачи. В планетарном варианте исполнения механической передачи одно колесо свободно установлено на водиле, связанном со входным звеном привода, и соединено с выходным звеном, а второе колесо зафиксировано от вращения относительно корпуса. В планетарном варианте исполнения механической передачи одно колесо свободно установлено на водиле, связанном со входным звеном привода и зафиксировано от вращения относительно корпуса, а второе колесо соединено с выходным звеном. В варианте исполнения механическая передача снабжена промежуточным элементом, размещенным в проточке храпового колеса и взаимодействующим с пластинами второго колеса в направлении, противоположном направлению эксцентриситета. Технический результат применения предлагаемого устройства является следствием реализации совокупности признаков формулы изобретения. В частности, вследствие расположения колес несоосно, с величиной взаимного эксцентриситета, превышающей отношение радиуса храпового колеса к числу его зубьев, передаточное отношение предлагаемой механической передачи не равно единице, т.е. вращение передается с редукцией, при этом граничное значение передаточного отношения определяется указанными параметрами храпового колеса. Реализация признаков обеспечивает новое качество по сравнению с прототипом, упрощение конструкции и эксплуатации приводов с применением предлагаемой механической передачи по сравнению с передачами-аналогами. Формула изобретения содержит в отличительной части признаки, специально созданные для использования в данном изобретении. Отсутствуют сведения о достижении указанного эффекта ранее посредством реализации полностью или частично предлагаемой совокупности признаков. Указанный эффект усиливается в случае применения признаков дополнительных пунктов формулы изобретения, кроме того, снабжение передачи механизмом изменения величины взаимного эксцентриситета колес позволяет плавно изменять передаточное отношение, придавая передаче свойства вариатора и значительно расширяя ее возможности. Признаки пунктов 3, 4, 5 являются альтернативными и их реализация обеспечивает, в зависимости от решаемой задачи, повышение или понижение оборотов выходного звена, изменение направления его вращения, что также расширяет возможности передачи. Снабжение передачи промежуточным элементом, размещенным в проточке храпового колеса и взаимодействующим с пластинами охватывающего колеса со стороны, противоположной направлению эксцентриситета, позволяет сократить нерабочее взаимодействие храпового колеса и пластин, повысив таким образом их долговечность и снизив шум при работе передачи. На чертежах приведены схемы механической передачи: фиг.1 - схема передачи, продольное сечение; фиг.2 - схема передачи, поперечное сечение; фиг.3 - схема передачи, продольное сечение, вариант исполнения; фиг.4 - схема передачи, поперечное сечение, вариант исполнения; фиг.5 - схема планетарной передачи, продольное сечение, вариант исполнения; фиг.6 схема планетарной передачи, поперечное сечение, вариант исполнения; фиг.7 - схема планетарной передачи, продольное сечение, вариант исполнения; фиг.8 - схема планетарной передачи, поперечное сечение, вариант исполнения; фиг.9 - схема зацепления в передаче с охватываемым храповым колесом; фиг.10 схема зацепления в передаче с охватывающим храповым колесом. Ме ханическая передача включает в себя корпус 1 (на фиг.1, 2, 3, 4 не показан), входное звено 2 и выходное звено 3, храповое колесо 4 с диаметром Dx (радиусом Rx) и количеством зубьев Z, колесо 5 с установленными на шарнирах 6 пластинами 7, взаимодействующими с упругими элементами 8. Передача может быть снабжена механизмом 9 изменения взаимного эксцентриситета "e" колес 4 и 5. Храповое колесо 4 может быть непосредственно закреплено на валу (входном звене 2) или свободно установлено с эксцентриситетом "e" на водиле 10, соединенном со входным звеном 2. В этом случае храповое колесо 4 соединяется компенсирующей муфтой 11 с выходным звеном 3 (фиг.5) или корпусом 1 (фиг.7) передачи. В проточке 12 храпового колеса 4 может быть установлено кольцо 13, взаимодействующее с пластинами 7 в направлении, противоположном направлению эксцентриситета "e". Работает передача следующим образом. Входному звену 2 сообщается вращение с угловой скоростью w1 (фиг.9). Пластины 7 охва тывающего колеса, прижимаемые упругими элементами 8 к поверхности храпового колеса, взаимодействуют с его выступами, образуя внутреннее зацепление колес - храпового с радиусом Rx и воображаемого, образованного концами пластин. В зоне "в" пластины 7 упруго деформируются под действием нагрузки и в зацеплении окружная скорость концов пластин Vок1 равна окружной скорости храпового колеса Vок2. Храповое колесо получает вращение со скоростью w2. Радиус воображаемого колеса в этой зоне зависит от величины эксцентриситета "e" и составляет R1max = Rx + e, а передаточное отношение равно I = Rx/(Rx + e). В зоне "c" храповое колесо начинает "обгонять" пластины 7, они распрямляются и выходят из зацепления. В любой I - ой точке зоны "a" окружная скорость храпового колеса превышает окружную скорость концов пластин и пластины свободно проскальзывают по поверхности храпового колеса 4. Возможно зацепление охватывающего храпового колеса 4 с внутренним, охватываемым колесом с пластинами 5 (фиг.10). Тогда ведущим по-прежнему является охватывающее колесо, но уже храповое. Передаточное отношение такой передачи равно I = (Rx - e)/R x, т.е. для указанных передач всегда I Rx/Z). Для передачи, изображенной на фиг.1, 2, конструктивно приемлемый диапазон изменения передаточного отношения лежит в пределах 0,25 < i < 1, а для передач, изображенных на фиг.5, 6, 7, 8, - в пределах 5 < i < 200. Потери энергии непосредственно в зацеплении незначительны и, в основном, связаны с проскальзыванием концов пластин по храповому колесу. КПД передач составляет 90 ... 95% при любом передаточном отношении. Так как в передачах имеет место упругое взаимодействие храпового колеса 4 и колеса с пластинами 7, требования к точности изготовления колес относительно невысокие, а число пластин, находящихся в зацеплении, возрастает с увеличением нагрузки, что повышает эффективность передачи. Поломка одной или нескольких пластин не делает передачу неработоспособной, а лишь незначительно изменяет ее показатели. Описанные передачи в виду их простоты, низких требований к точности изготовления и высокой надежности могут эффективно использоваться в нереверсивных приводах технологических машин различного назначения.
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical gearing
Автори англійськоюLebedev Yurii Vasyliovych, Lebediev Yurii Vasyliovych, Kyrychenko Andrii Mykolaiovych, Kryzhanivskyi Volodymyr Andriiovych, Nadein Vladyslav Semenovych
Назва патенту російськоюМеханическая передача
Автори російськоюЛебедев Юрий Васильевич, Кириченко Андрей Николаевич, Крижанивский Владимир Андреевич, Надеин Владислав Семенович
МПК / Мітки
МПК: F16H 15/00
Код посилання
<a href="https://ua.patents.su/4-17596-mekhanichna-peredacha.html" target="_blank" rel="follow" title="База патентів України">Механічна передача</a>
Зубчаста передача
Номер патенту: 96
Опубліковано: 30.04.1993
Автори: Благута Оксана Анатольївна, Благута Анатолій Олександрович
МПК: F16H 57/04, F16H 1/06
Формула / Реферат:
Формула изобретенияЗубчатая передача с магнитоактивной смазкой, включающая зубчатые колеса, контактирующие между собой торцевые полюсные наконечники в виде дисков по крайней мере на одном из колес и постоянные магниты, вмонтированные в пазах на торцах колеса, отличающаяся тем, что, с целью повышения долговечности, зубья зубчатых колес облицованы материалом, содержащим порошок карбонильного железа и порошок графита, полюсные наконечники...
Багатошвидкісна хвильова передача
Номер патенту: 12594
Опубліковано: 28.02.1997
Автори: Просянюк Віталій Вікторович, Маргуліс Михайло Володимирович
МПК: F16H 3/00
Мітки: багатошвидкісна, передача, хвильова
Формула / Реферат:
Многоскоростная волновая передача, содержащая корпус, в котором размещен генератор волн, укрепленный на ведущем валу с возможностью взаимодействия с гибкими колесами, концентричне установленными одно в другом, наружные из которых жестко соединены с корпусом, и снабженными наружными зубчатыми венцами, смещенными относительно друг друга в осевом направлении и взаимодействующими с жесткими колесами, имеющими наружные зубчатые венцы,...
Зубчаста передача внутрішнього зачіплювання
Номер патенту: 7
Опубліковано: 30.04.1993
Автори: Власов Іван Петрович, Коряков-Савойський Борис Анатолійович, Алексахін Ігор Васильович
МПК: F16H 1/10
Мітки: зубчаста, передача, зачіплювання, внутрішнього
Формула / Реферат:
Зубчатая передача внутреннего зацепления. содержащая внутреннее и внешнее зубчатые колеса с малой разностью чисел зубьев, оси которых установлены параллельно друг другу, отличающаяся тем, что зубья колес выполнены мелкомодульными, а одно из зубчатых колес выполнено с ограниченно-податливым ободом и смещено в плоскости зацепления относительно своего номинального положения в направлении другого зубчатого колеса на величину, определяемую...
Планетарна прецесійна конічна передача
Номер патенту: 4950
Опубліковано: 28.12.1994
Автори: Золотаренко Віктор Кузьмич, Мартиненко Борис Іванович, Саяпін Олександр Олександрович, Верболоз Анатолій Демидович
МПК: F16H 1/32
Мітки: планетарна, конічна, прецесійна, передача
Формула / Реферат:
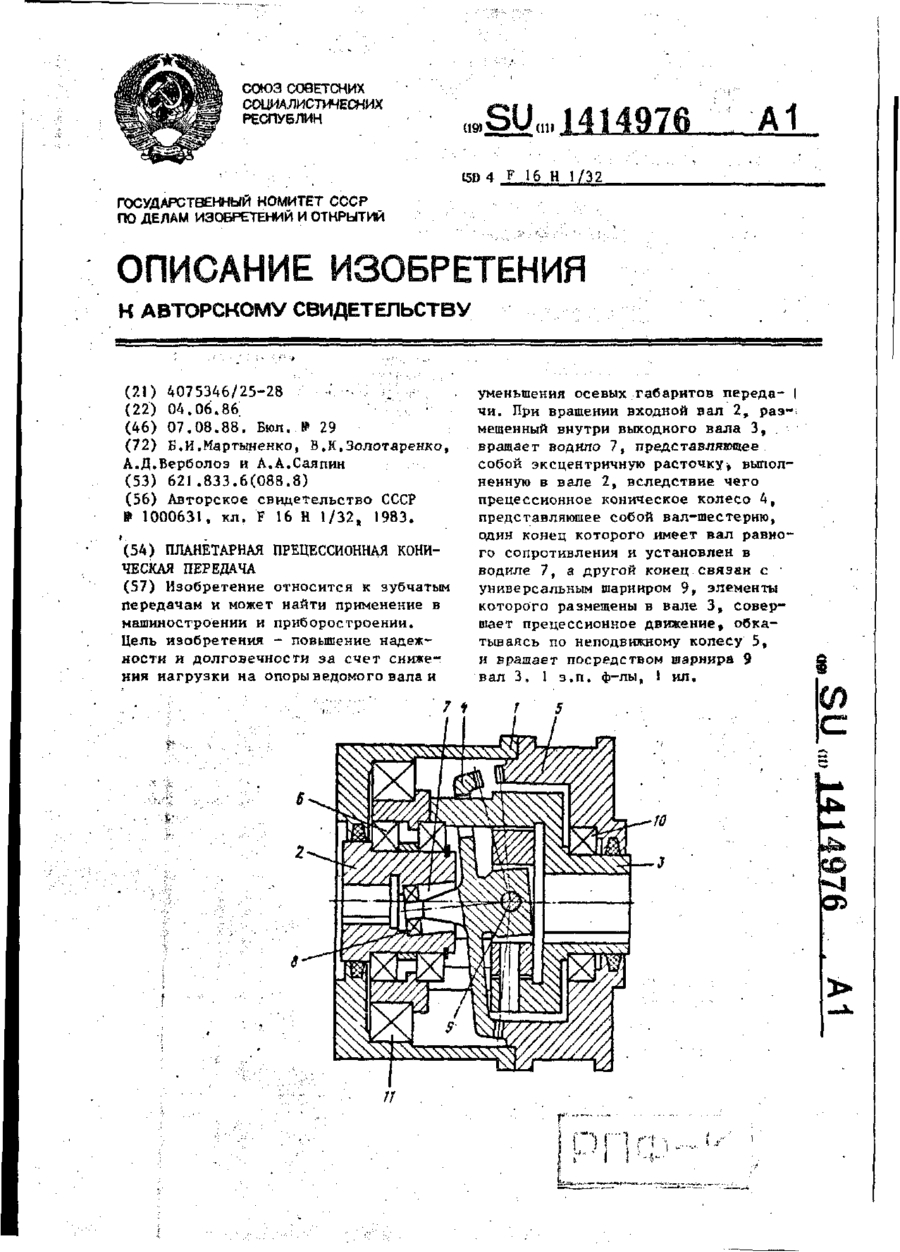
1. Планетарная прецессионная коническая передача, содержащая входной и выходной валы, первый из которых установлен внутри второго, водило, неподвижное коническое колесо, прецессионное коническое колесо, связанное посредством универсального шарнира с выходным валом для взаимодействия с неподвижным коническим колесом, отличающаяся тем, что, с целью повышения надежности и долговечности за счет снижения нагрузки на опоры ведомого вала и...
Однохвилева передача
Номер патенту: 13958
Опубліковано: 25.04.1997
Автори: Нечепуренко Олександр Васильович, Маргуліс Михайло Володимирович, Алексєєв Андрій Сергійович
МПК: F16H 1/00
Мітки: однохвилева, передача
Формула / Реферат:
Одноволновая передача, содержащая гибкое зубчатое колесо, жесткое зубчатое колесо и трехдисковый генератор волн, один из крайних дисков которого установлен с возможностью деформации гибкого зубчатого колеса, а средний диск, смещенный по отношению к крайним в противоположную сторону от оси передачи, установлен с возможностью контакта с цилиндрической беговой дорожкой, выполненной на корпусе вне гибкого колеса, отличающаяся тем, что другой...
Попередній патент: Водорозбірний кран
Наступний патент: Касета-дозиметр
Випадковий патент: Класифікатор для пневморозділення полідисперсних сумішей