Термошумовий спосіб визначення опору високоомного об’єкта
Номер патенту: 19248
Опубліковано: 15.12.2006
Автори: Скрипник Юрій Олексійович, Каламєєць Тетяна Петрівна
Формула / Реферат
Термошумовий спосіб визначення опору високоомного об'єкта, при якому з досліджуваного об'єкта знімають шумову напругу, розгалужують її на дві напруги, одну з них періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану по амплітуді напругу, підсилюють її в смузі частот теплових флуктуацій та квадратично детектують, підсилюють вибірково низькочастотну змінну складову продетектованої напруги, синхронно її детектують та усереднюють, отримують постійну напругу, який відрізняється тим, що отриману постійну напругу перетворюють в перший цифровий код, який запам'ятовують, з досліджуваного об'єкта знімають шумовий струм, який перетворюють в іншу шумову напругу, отримують іншу постійну напругу, перетворюють її в другий цифровий код, який запам'ятовують, а опір високоомного об'єкта визначають за формулою
 ,
,
де RХ - опір високоомного об'єкта;
Ni - перший цифровий код;
N2 - другий цифровий код;
Si - крутість перетворення шумового струму об'єкта в шумову напругу.
Текст
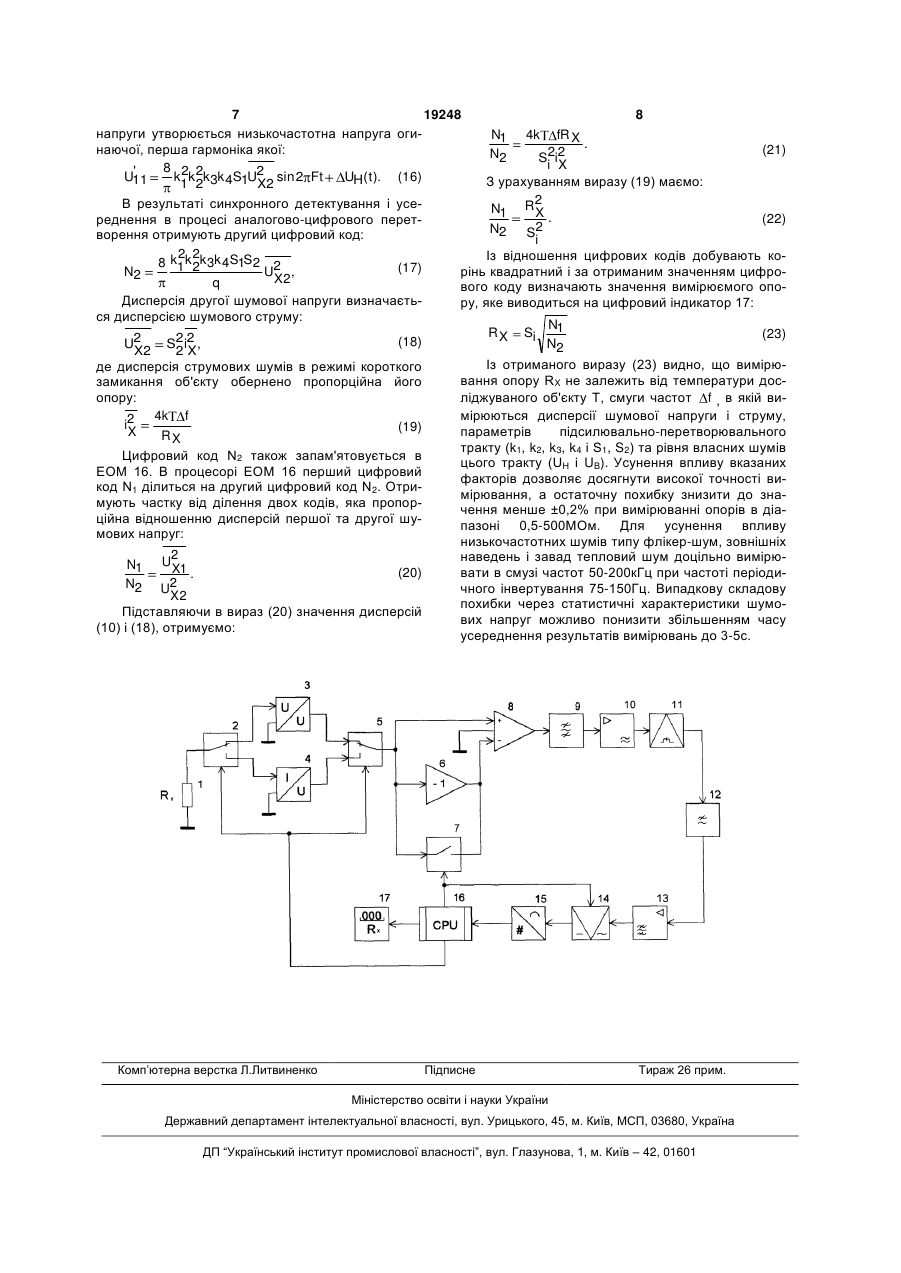
Термошумовий спосіб визначення опору високоомного об'єкта, при якому з досліджуваного об'єкта знімають шумову напругу, розгалужують її на дві напруги, одну з них періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану по амплітуді напругу, підсилюють її в смузі частот теплових флуктуацій та квадратично детектують, підсилюють вибірково низькочастотну змінну складову продетектованої напруги, синх ронно її детектують та усереднюють, отримують постійну напругу, який відрізняється тим, що отриману постійну напругу перетворюють в перший цифровий код, який запам'ятовують, з досліджуваного об'єкта знімають шумовий струм, який перетворюють в іншу шумову напругу, отримують іншу постійну напругу, перетворюють її в другий цифровий код, який запам'ятовують, а опір високоомного об'єкта визначають за формулою Корисна модель відноситься до вимірювальної техніки і може бути використана для оцінки електричного опору високоомних об'єктів (ізоляція електроприладів, газові та плазмові середовища, поля електричних втрат, полімерні матеріали, датчики малопровідних середовищ і т. ін.) за рівнем їх теплових шумів. Відомо, що рівень теплового шуму або теплових флуктуацій в фізичних тілах та середовищах однозначно пов'язаний з температурою об'єкту та його електричним опором. Кількісно він визначається формулою Найквіста [див. Рытов С.М. Теория электрических флюктуаций и теплового излучения. -М.: Издательство АН СССР, 1953 -с.46– 50]: Відомий термошумовий спосіб визначення опору високоомного об'єкту [див. Скрипник Ю.О., Курко В.Р., Скрипник В.Й. Шумова кондуктометрія /Сучасні інформаційні та енергозберігаючі технології життєзабезпечення людини. Збірник наукових праць. -вип.12. -C.109-112], в якому шумову напругу досліджуваного об'єкту підсилюють, квадратично детектують і вимірюють постійну складову продетектованої напруги, за якою визначають електричний опір. Через накладення власних шумів підсилювача на теплові шуми досліджуваного об'єкту неможливо досить точно вимірювати опір. Операції способу не дозволяють розділити шуми об'єкту, що вимірюються та власні шуми підсилювача і усунути вплив останніх на результат вимірювання. Відомий також термошумовий спосіб визначення опору високоомного об'єкту [див. Заявка на корисну модель №2004032055, МПК7 G01R27/00. Термошумовий спосіб вимірювання опорів високоомних об'єктів. Рішення про видачу патенту від 18.01.2006р.], при якому з досліджуваного об'єкту знімають шумову напругу, розгалужують її на дві напруги, одну з них періодично інвертують з низькою частотою, порівнюють інвертовану напругу з N1 N2 , де RХ - опір високоомного об'єкта; Ni - перший цифровий код; N2 - другий цифровий код; Si - крутість перетворення шумового струму об'єкта в шумову напругу. Si 4k fR, де U2 - середній квадрат (дисперсія) теплового шуму; k - постійна Больцмана; Т - термодинамічна температура; f - смуга частот теплового шуму; R - опір досліджуваного об'єкту. 19248 (11) UA (19) U2 (13) U RX 3 19248 4 не інвертованою, отримують різницеву модульому опору об'єкта, який не залежить від температувану по амплітуді напругу, підсилюють її в смузі ри об'єкта, смуги частот перетворюємих шумових частот теплових флуктуацій та квадратично детекнапруг, значень підсилень і функціональних перетують, підсилюють вибірково низькочастотну змінтворень в підсилювально-перетворювальному ну складову продетектованої напруги, синхронно її тракті, що підвищує точність визначення опорів детектують та усереднюють, отримують постійну високоомних об'єктів. напругу. На кресленні представлена аналого-цифрова У відомому способі усувається вплив власних схема, що дозволяє реалізувати запропонований шумів підсилювача на результат вимірювання теспосіб. плових шумів об'єкту, що представлений в вигляді Високоомний об'єкт 1 через перемикач 2 підкпостійної напруги. Але значення цієї напруги вилючається до високоомного перетворювача 3 "назначає не тільки рівень теплових шумів досліджупруга-напруга" або до низькоомного перетворюваваного об'єкту, але і його температури, яка може ча 4 "струм-напруга". Перемикач 5 підключає змінюватися в широких межах. Крім того, вимірюінвертор 6, що шунтується ключем 7, та диференвана постійна напруга залежить від смуги частот ціальний підсилювач 8 до виходів перетворювачів теплового шуму, що вимірюється, яку важко стабі3 і 4. До виходу диференціального підсилювача 8 лізувати при дії дестабілізуючих факторів. Велике підключені послідовно з'єднані смуговий фільтр 9, підсилення, що потрібне при вимірюванні шумової підсилювач 10 високої частоти, квадратичний денапруги, також нестабільне і вносить велику похитектор 11, фільтр 12 нижніх частот, вибірковий бку в вимірюємий опір, що не забезпечує необхідпідсилювач 13 низької частоти та синхронний деної точності вимірювання. тектор 14. До виходу синхронного детектора 14 В основу корисної моделі покладена задача підключений інтегруючий аналого-цифровий перестворити такий термошумовий спосіб визначення творювач (АЦП) 15, вихід якого з'єднаний з електопору високоомного об'єкту, в якому введення ронно-обчислювальною машиною (ЕОМ) 16. Винових операцій з шумовими сигналами дозволило ходи ЕОМ з'єднані з керуючими входами б усунути вплив температури досліджуваного об'єперемикачів 2, 5 та ключа 7. До ЕОМ 16 підключекту, нестабільності смуги частот і підсилення шуний також цифровий індикатор 17. мових напруг на результат вимірювання, що заСпосіб здійснюється наступним чином. безпечить підвищення точності визначення опорів При вказаному положенні перемикачів 2 і 5 з високоомних об'єктів. досліджуваного об'єкту 1 знімається перша шумоПоставлена задача вирішується тим, що в ва напруга UX1(t), яка на виході перемикача 5 розтермошумовий спосіб визначення опору високоогалужується на дві однакових напруги U1(t) = U2(t) много об'єкту, при якому з досліджуваного об'єкту = UX1(t). Одна з напруг U1(t) змінює свою полярзнімають шумову напругу, розгалужують її на дві ність інвертором 6, який періодично шунтується напруги, одну з них періодично інвертують з низьключем 7. Періодично інвертована напруга U1(t) кою частотою, порівнюють інвертовану напругу з діє на прямий вхід диференціального підсилювача неінвертованою, отримують різницеву модульова8, на інверсний вхід якого діє не інвертована нану по амплітуді напругу, підсилюють її в смузі часпруга U2(t). тот теплових флуктуацій та квадратично детектуЯкщо шумову напругу UX1(t) представити в ють, підсилюють вибірково низькочастотну змінну комплексному вигляді U X1 , то періодично інвертоскладову продетектованої напруги, синхронно її вану напругу U1(t) можна представити як часову детектують та усереднюють, отримують постійну напругу, який відрізняється тим, що отриману поспослідовність комплексів + U1 і - U1 , а не інвертотійну напругу перетворюють в перший цифровий код, який запам'ятовують, з досліджуваного об'єкту вану напругу U2(t) як + U 2 . При розімкнутому ключі знімають шумовий струм, який перетворюють в 7 розгалужені напруги, одна з яких інвертується не іншу шумову напругу, отримують іншу постійну віднімаються, а додаються на виході диференціанапругу, перетворюють її в другий цифровий код, льного підсилювача 8. З урахуванням власних який запам'ятовують, а опір високоомного об'єкту шумів диференціального підсилювача 8 на виході визначають за формулою підсилювача маємо сумарну напругу R X S i N1 / N2 , (1) U3 2k 1 U X1 UH UB , де RX - опір високоомного об'єкту; N1 - перший цифровий код; де k1 - коефіцієнт підсилення диференціального N2 - другий цифровий код; підсилювача 8; Si - крутизна перетворення шумового струму об'єкту в шумову напругу. UH i UB - напруги низькочастотних і високочасВведення в термошумовий спосіб визначення тотних шумів на виході диференціального підсиопору високоомного об'єкту нових операцій по пелювача 8. ретворенню постійних напруг, пропорційних шумоВ термошумовому способі визначення опору вій напрузі і шумовому струму досліджуваного високоомного об'єкту інформаційний шум від дособ'єкту, в цифрові коди, подальше ділення цифроліджуваного об'єкту навіть після підсилення (2k1, вого коду шумової напруги на цифровий код шумового струму, добування квадратного кореня із U X ) одного порядку з власними шумами на виході частки від ділення кодів дозволяє в результаті отримати цифровий код пропорційний вимірюємо 5 19248 6 де k4 - коефіцієнт підсилення вибіркового підсилюUB ). Тому ними не можна вача 13 низької частоти; підсилювача (2k1 U X1 нехтувати. При замкненому ключі 7 інвертування однієї із шумових напруг відсутнє і різницева напруга на виході диференціального підсилювача 8 визначається тільки власними шумами: (2) U 4 UH UB . Автоматичний ключ 7 керується низькочастотною прямокутною напругою, яка формується ЕОМ 16. В результаті періодичних замикань-розмикань ключа 7 на виході диференціального підсилювача 8 шумова напруга змінюється від сумарного значення (1) до різницевого значення (2), тобто формується модульована по амплітуді шумова напруга. Модульована напруга фільтрується в смузі частот теплових флуктуацій смуговим фільтром 9. Відфільтрована від низькочастотних складових напруга підсилюється високочастотним підсилювачем 10. Високочастотні складові підсиленої модульованої напруги можна представити як: U5 (3) k 2 (2k 1 U X1 UB ), (4) U6 k 2 UB , де k2 - коефіцієнт підсилення підсилювача високої частоти 10. Складові модульованої напруги (3) і (4) квадратично детектуються в квадратичному детекторі 11 і усереднюються фільтром 12 нижніх частот. В результаті усереднення квадратично перетворених шумів утворюється послідовність імпульсів з амплітудами: U7 k 3 S1 k 2 2k 1 U X1 UB 2 , (5) 2 U8 k3S1 k 2 UB (6) , де S1 - крутизна квадратичного детектування; k3 - коефіцієнт передачі фільтра нижніх частот; символ означає операцію усереднення. В послідовності усереднених напруг (5) і (6) з нерівними амплітудами виділяють низькочастотну огинаючу прямокутних імпульсів: U7 U8 U9 sign sin 2 Ft UH( t ), (7) 2 де F - частота періодичного інвертування шумової напруги; sign sin 2 Ft - низькочастотна напруга прямокутної форми; UH(t) - низькочастотні шуми квадратичного детектора. Вибірковим підсилювачем 13, налаштованим на частоту F, підсилюється перша гармоніка напруги (7). Напруга першої гармоніки з урахуванням амплітуд імпульсів (5) і (6): U10 8 2 k 4k 3k 2k1S1 UB UX1 k1UX1 2 UH, (8) UH - частина напруги низькочастотних шумів, що попадають в смугу пропускання вибіркового підсилювача 13 низької частоти. В вираз (8) входить добуток напруг власних високочастотних шумів диференціального підсилювача 8 і теплових шумів об'єкту. Але потрібно врахувати, що ці шуми між собою не корельовані. Тому їх усереднений добуток дорівнює нулю: (9) UB UX1 0. Другий член виразу (8) представляє собою середній квадрат напруги теплових шумів, тобто дисперсію теплових флуктуацій. Згідно формули Найквіста: (10) U2 4k fR X X1 де k - постійна Больцмана; Т - термодинамічна температура об'єкта 1; f - смуга частот, що визначається смуговим фільтром 9; RX - опір досліджуваного об'єкту 1. З урахуванням співвідношень (8) і (9) низькочастотна напруга (7) пропорційна тільки дисперсії теплових шумів: 8 2 2 U11 k k k3k 4S1U2 sin 2 Ft UH( t ). (11) 1 2 X1 Низькочастотну напругу (11) синхронно детектують синхронним детектором 14 і усереднюють в АЦП інтегруючого типу 15. Цифровий код на виході АЦП 15 визначається тільки постійною складовою продетектованої напруги: 2 2 8 k1 k 2k 3k 4S1S2 2 (12) N1 U , X1 q де q - одиниця молодшого розряду АЦП 15; S2 - крутизна перетворення синхронного детектора 14. Цифровий код N1 запам'ятовується в ЕОМ 16. Після цього по команді ЕОМ 16 перемикачі 2 і 5 переводяться в нижнє положення. При цьому до досліджуваного об'єкту 1 підключається перетворювач 4 "струм-напруга" з низькоомним входом. На виході перетворювача 4 формується напруга, пропорційна шумовому струму об'єкту: UX2 = SiiX(t), (13) де Si - крутизна перетворення струму в напругу. Друга шумова напруга (13) після розгалуження і інвертування поступає на входи диференціального підсилювача 8. В результаті періодичного інвертування однієї із розгалужених напруг на виході диференціального підсилювача 8 формується модульована напруга, що складається із часової послідовності комплексів: ' ' (14) U5 k 2 (2k1 UX2 UB ), ' (15) U6 k 2 UB . Підсилюють модульовану по амплітуді напругу в смузі частот теплових флуктуацій і квадратично детектують. В результаті детектування шумової 7 19248 напруги утворюється низькочастотна напруга огинаючої, перша гармоніка якої: 8 2 2 ' U11 k k k3k 4S1U2 sin 2 Ft UH( t ). (16) 1 2 X2 В результаті синхронного детектування і усереднення в процесі аналогово-цифрового перетворення отримують другий цифровий код: 2 2 8 k1 k 2k 3k 4S1S2 2 (17) N2 U , X2 q Дисперсія другої шумової напруги визначається дисперсією шумового струму: (18) U2 S2i2 , X2 2X де дисперсія струмових шумів в режимі короткого замикання об'єкту обернено пропорційна його опору: 4k f i2 (19) X RX Цифровий код N2 також запам'ятовується в ЕОМ 16. В процесорі ЕОМ 16 перший цифровий код N1 ділиться на другий цифровий код N2. Отримують частку від ділення двох кодів, яка пропорційна відношенню дисперсій першої та другої шумових напруг: U2 X1 . (20) 2 U X2 Підставляючи в вираз (20) значення дисперсій (10) і (18), отримуємо: N1 N2 Комп’ютерна верстка Л.Литвиненко 8 N1 N2 4k fR X . (21) S2i2 i X З урахуванням виразу (19) маємо: 2 N1 R X . (22) N2 S2 i Із відношення цифрових кодів добувають корінь квадратний і за отриманим значенням цифрового коду визначають значення вимірюємого опору, яке виводиться на цифровий індикатор 17: N1 (23) N2 Із отриманого виразу (23) видно, що вимірювання опору RX не залежить від температури досліджуваного об'єкту Т, смуги частот f , в якій вимірюються дисперсії шумової напруги і струму, параметрів підсилювально-перетворювального тракту (k1, k2, k3, k4 і S1, S2) та рівня власних шумів цього тракту (UH і UB). Усунення впливу вказаних факторів дозволяє досягнути високої точності вимірювання, а остаточну похибку знизити до значення менше ±0,2% при вимірюванні опорів в діапазоні 0,5-500МОм. Для усунення впливу низькочастотних шумів типу флікер-шум, зовнішніх наведень і завад тепловий шум доцільно вимірювати в смузі частот 50-200кГц при частоті періодичного інвертування 75-150Гц. Випадкову складову похибки через статистичні характеристики шумових напруг можливо понизити збільшенням часу усереднення результатів вимірювань до 3-5с. RX Si Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the resistance of the object by the thermal noise intensity
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Kalameiets Tetiana Petrivna
Назва патенту російськоюСпособ определения сопротивления объекта по интенсивности теплового шума
Автори російськоюСкрипник Юрий Алексеевич, Каламеец Татьяна Петровна
МПК / Мітки
МПК: G01R 27/00
Мітки: визначення, термошумовий, спосіб, високоомного, об'єкта, опору
Код посилання
<a href="https://ua.patents.su/4-19248-termoshumovijj-sposib-viznachennya-oporu-visokoomnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Термошумовий спосіб визначення опору високоомного об’єкта</a>
Термошумовий спосіб вимірювання опорів високоомних об’єктів
Номер патенту: 14264
Опубліковано: 15.05.2006
Автори: Курко Володимир Романович, Скрипник Юрій Олексійович, Каламєєць Тетяна Петрівна
МПК: G01R 27/00
Мітки: об'єктів, опорів, високоомних, спосіб, вимірювання, термошумовий
Формула / Реферат:
Термошумовий спосіб вимірювання опорів високоомних об'єктів, при якому з досліджуваного об'єкта знімають шумову напругу, вимірюють постійну напругу, за значенням якої визначають опір досліджуваного об'єкта, який відрізняється тим, що шумову напругу розгалужують на дві напруги, одну з яких періодично інвертують з низькою частотою, порівнюють інвертовану напругу з неінвертованою, отримують різницеву модульовану напругу, яку підсилюють в смузі...
Термошумовий вимірювач
Номер патенту: 16535
Опубліковано: 15.08.2006
Автори: Скрипник Юрій Олексійович, Каламєєць Тетяна Петрівна
МПК: G01N 27/04
Мітки: вимірювач, термошумовий
Формула / Реферат:
Термошумовий вимірювач, що містить імпедансний датчик, диференціальний підсилювач та високочастотний підсилювач з'єднаний з квадратичним детектором, який відрізняється тим, що додатково введені зразковий резистор, перемикач, паралельно з'єднані між собою ключ і інвертор, смуговий фільтр, інтегруючий аналого-цифровий перетворювач і мікро-ЕОМ з цифровим індикатором, при цьому один з входів перемикача з'єднаний з потенціальним затискачем...
Спосіб виміру електрошкірного опору
Номер патенту: 6650
Опубліковано: 16.05.2005
Автори: Холоденко Вероніка Миколаївна, Скрипник Юрій Олексійович
МПК: A61B 5/05
Мітки: спосіб, електрошкірного, опору, виміру
Формула / Реферат:
Спосіб виміру електрошкірного опору, при якому накладають на точку акупунктури вимірювальний і за нею додатковий електроди, знімають шумову напругу електродів, розщеплюють напругу на дві протифазні напруги, підсилюють їх в смузі частот теплових флуктуацій, перемножують підсилені напруги, усереднюють, виділяють з усереднених перемножених напруг змінну складову частоти перемикань протифазних напруг, випрямляють її, вимірюють постійну складову...
Термошумовий пристрій для вимірювання температури
Номер патенту: 48268
Опубліковано: 15.08.2002
Автори: Скрипник Юрій Олексійович, Маковська Вікторія Юріївна
МПК: G01K 7/30
Мітки: термошумовий, пристрій, вимірювання, температури
Формула / Реферат:
1. Термошумовий пристрій для вимірювання температури, який складається з двох підвищувальних трансформаторів, вторинні обмотки яких з'єднані послідовно, а їх середня точка заземлена, двох підсилювачів, входи яких з'єднані з потенціальними кінцями вторинних обмоток підвищувальних трансформаторів, суматора, перший вхід якого з'єднаний з виходом одного підсилювача, а другий вхід суматора через автоматичний перемикач та інвертуючий трансформатор...
Спосіб виміру електрошкірного опору
Номер патенту: 61753
Опубліковано: 17.11.2003
Автори: Холоденко Вероніка Миколаївна, Скрипник Юрій Олексійович
МПК: A61B 5/05
Мітки: електрошкірного, виміру, опору, спосіб
Формула / Реферат:
Спосіб виміру електрошкірного опору, що включає накладення на точку акупунктури вимірювального і поза нею додаткового електродів, вимір різниці напруг між ними та обчислення електрошкірного опору, який відрізняється тим, що після накладення вимірювального та додаткового електродів різницеву напругу між ними розщеплюють в смузі частот теплових флуктуацій на дві протифазні напруги, які підсилюють, одну з підсилених напруг знову розщеплюють на...
Попередній патент: Виріб, виготовлений зі сплаву b-титану або квазі-b-титану та спосіб його виготовлення
Наступний патент: Термошумовий вологомір
Випадковий патент: Пристрій для аналого-цифрового перетворення